
Abstract
Simulation in surgery is a safe and cost-effective way of training. Operating room performance is improved after simulation training. The necessary attributes of surgical simulators are acceptability and cost-effectiveness. It is also necessary for a simulator to demonstrate face, content, predictive, construct and concurrent validity. Urologists have embraced robot-assisted surgery. These procedures require steep learning curves. There are 6 VR simulators available for robot-assisted surgery; the daVinci Skills Simulator (dVSS), the Mimic dV Trainer (MdVT), the ProMIS simulator, the Simsurgery Educational Platform (SEP) simulator, the Robotic Surgical Simulator (RoSS) and the RobotiX Mentor (RM). Their efficacy is limited by the lack of comparative studies, standardisation of validation and high cost. There are a number of robotic surgery training curricula developed in recent years which successfully include simulation training. There are growing calls for these simulators to be incorporated into the urology training curriculum globally to shorten the learning curve without compromising patient safety. Surgical educators in urology should aim to develop a cost-effective, acceptable, validated simulator that can be incorporated into a standardised, validated robot-assisted surgery training curriculum for the next generation of robotic surgeons.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Robot-assisted surgery (RAS) has been embraced by the urological community and robotic surgical techniques are now commonplace for surgeries such as radical prostatectomy, partial nephrectomy and pyeloplasty. The first robot-assisted radical prostatectomy was performed in 2000 by Binder et al in Frankfurt, Germany and the surgical technique was described by Abbou [1]. Beecken performed the first robot-assisted radical cystectomy in Frankfurt in 2003 and Gettman performed the first robot-assisted Anderson-Hynes pyeloplasty in Austria in 2002 [2]. There were 1500 RAS procedures performed worldwide in 2000, and by 2004 there were 20,000. Urology accounted for largest single-specialty increase in use of RAS [41]. Trainees frequently encounter robotic surgery during their mentors’ learning curve which may result in limited training and many urologists seeking forms of post-residency robotic training [3, 4]. It is difficult to incorporate RAS skills into urological training programmes. Moreover, there are growing ethical concerns about training in RAS on patients as the majority of surgical error occurs in the operating room and during the initial learning curve [5]. Surgical error is attributed to inexperience in 53% of cases [5]. Inexperience accounts for a greater number of errors than fatigue, poor communication, and excess workload [5]. The traditional Halstedian model of “see one, do one, teach one” is outdated and no longer sustainable.
Simulation is the creation of an artificial environment to assess the response of an individual. The aviation sector has utilised simulation for many years and trainees are required to complete simulation flights before gaining independence [6]. Roscoe and Williges introduced the concept of the transfer effectiveness ratio (TER) in 1980 to measure the effectiveness of simulators in the aviation industry [40]. The TER can be calculated by the following formula;
In this equation Tc is the time needed for on-the-job training by control group, Te is the time needed for on-the-job training by experimental group after simulation training, and Ts is the simulation training time by experimental group. A TER value greater than 1 indicates simulation training is more effective than on-the-job training, and a TER value less than 1 indicates that on-the-job training is more effective than simulation.
In recent years, simulation has expanded into the surgical arena as a safe, cost-effective method for training. Surgical simulators are categorised into low fidelity (e.g. box trainer) and high fidelity (e.g. cadaveric models). They are also categorised into augmented reality (AR) and virtual reality (VR). Several randomised studies have demonstrated improvements in operating room performance after simulation training. Kallstrom et al. demonstrated a trend towards improved performance during transurethral resection of the prostate (TURP) on humans following simulation training [7]. Hamilton et al. evaluated the performance of surgeons performing laparoscopic cholecystectomy on humans before and after simulation training using a box trainer and a VR simulator with findings demonstrating significant improvements in performance after the VR simulator [8]. The present narrative review aims to provide an overview on the current status of robotic simulation training for technical skills among urological trainees.
Simulators in surgery
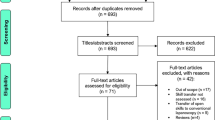
The history of simulation in surgery dates to the first recorded operation in India in 600 B.C. Leaf and clay models were used prior to a forehead flap nasal reconstruction [9]. Following the first laparoscopic cholecystectomy in 1987, doubts were raised about the safety of the procedure. This led to surgical societies calling for training outside the operating room and minimum requirements for surgeons to meet prior to performing the procedure [10]. Seymour et al. assessed the benefits of a VR simulator for laparoscopic cholecystectomy. Sixteen residents were randomised to either receive VR training or control (non-VR). Gallbladder dissection was 29% faster for VR-trained residents and errors were six times less likely to occur. Non-VR-trained residents were nine times more likely to transiently fail to make progress and five times more likely to injure the gallbladder [11]. In the US a residency review committee declared in 2008 that all surgical training programmes should include simulation as part of training [12]. A national simulation-based training program for surgery has been implemented in the UK, and trainees can enter simulated procedures into their logbooks [18].
Simulators in urology
Most surgical procedures performed by urological trainees are endoscopic and are therefore suitable for simulation-based training (e.g. TURP, TURBT, ureteroscopy). However, there are no universally accepted criteria on now to validate simulators. Validity determines whether a test succeeds in testing the competencies that it is designed to test. A surgical simulator must have the following attributes:
-
Face validity Subjective assessment of how well the simulator resembles the situation in the real world
-
Content validity Subjective assessment of how well the content is assessed by the simulation exercise
-
Predictive validity Objective assessment of how well the simulator will predict future performance
-
Construct validity Objective assessment of how well the simulator can differentiate a novice from an expert
-
Concurrent validity Objective assessment of how well the results of the test correlate with gold standard tests [13] (Table 1).
There are a variety of validated simulators available for endourological training (Table 2). The Uro-Scopic Trainer (Limbs and Things, UK) is a high-fidelity simulator that consists of a mannequin and allows trainees to use urological operating instruments [14]. The URO-Mentor (Simbionix, USA) is a VR simulator that uses a computer interface for urological surgeries such as cystoscopy, ureteroscopy and TURBT. Repeated use of this simulator by trainees resulted in improved procedure completion time and reduced trauma [15]. The URO-Mentor also has demonstrated construct validity [15]. The PelvicVision TURP VR simulator demonstrated improved trainee performance of the procedure in the operation room and has also shown construct validity [7]. The PERC Mentor (Simbionix, USA) VR simulator is used to teach urological trainees how to achieve percutaneous renal access for percutaneous nephrolithotomy. The SimPORTAL fluoro-less C-arm trainer is the only physical simulator available for achieving renal access for percutaneous nephrolithotomy [38]. After simulation training, surgeons achieved faster access in fewer attempts, with less complications thereby demonstrating predictive validity [16].
RAS simulators
There are 6 VR simulators available for RAS in the field of urology; the daVinci Skills Simulator (dVSS), the Mimic dV Trainer (MdVT), the ProMIS simulator, the Simsurgery Educational Platform (SEP) simulator, the Robotic Surgical Simulator (RoSS) and the RobotiX Mentor (RM) (Fig. 1). Four of the simulators function as a “stand-alone” simulator which does not require the daVinci console for use (Table 3).

daVinci skills simulator
The dVSS was created by Intuitive Surgical in 2011 and costs $89,000 USD [13] (Table 3). The trainee sits at the operating console as you would during conventional live surgery. If the console is being used for surgery, the simulator cannot be used. Amirian et al. demonstrated that the dVSS resulted in an improved in RAS skills among novices [17]. The dVSS can differentiate between experts and novices, thus demonstrating construct validity [18]. The authors also demonstrated face and content validity of the device and participants rated the simulated environment as ‘very realistic’. Expert surgeons rated it as a ‘very useful training tool’ for residents and scored it 10/10 on a visual analogue scale [18].
Mimic dV trainer
The MdVT is a stand-alone simulator created by Mimic Technologies in 2007 and costs $158,000 USD [13]. Kenney et al. evaluated this VR simulator with medical students, trainees and consultant surgeons [19]. The authors demonstrated that the simulator has face, content and construct validity. Surgeons recruited into the study felt that is was useful for training and should be incorporated into the surgical curriculum. Experts outperformed novices in total score, total task time, total instrument motion and number of instrument collisions.
ProMIS simulator
The ProMIS laparoscopic simulator was created by Haptica© in Ireland in 2003 and costs $35,000 USD [13]. Feifer et al. conducted a randomised controlled trial to evaluate if two laparoscopic simulators could be adapted to perform RAS simulation among a population of 20 medical students without experience [20]. They used the ProMIS and LapSim programmes and adapted them for use with the daVinci console. Medical students were randomised to receive training on either ProMIS, LapSim, both or neither. The ProMIS-alone group showed statistically significant improved scores on the daVinci console after training [20]. The ProMIS simulator could discriminate between experts and novices performing RAS on a vesicourethral anastomosis model, thus demonstrating construct validity [21]. ProMIS has also shown face, content and construct validity [22]. Surgeons rated it as useful for training and felt it should be incorporated into the urology curriculum [22].
Simsurgery educational platform
The SEP simulator is a stand-alone simulator created by SimSurgery in Norway in 2005 and costs $62,000 USD [13]. It comprises a master console with two controllers that mimic the control arms of the robot. There is a clutch pedal similar to the daVinci system and three studies have evaluated its use. Khan et al. sought to establish the feasibility and acceptability of a centralised, simulation-based training programme [23]. In this study, construct validity of the simulator was demonstrated. Ninety percent of participants rated training models as being realistic and easy to use and 95% recommended the use of simulation during surgical training. Balasundaram et al. evaluated two groups on the SEP; 10 junior surgical residents and 2 expert consultant surgeons [24]. Residents completed five tasks ten times and consultants completed the tasks twice. All the tasks displayed statistically significant learning curves [24]. Experts only outperformed the novice group in 2/5 tasks; suturing with and without traction. The authors felt that these two tasks were likely to be the most complex [24]. Gavazzi et al. demonstrated that the SEP robotic simulator has face, content and construct validity as a virtual reality simulator for robotic surgery [25]. Experts showed fewer errors compared with novices in the tasks and decreased tendency to use unnecessary movements. The authors noted that 90% rated the trainer as ‘realistic and easy to use’, 87% considered it ‘generally useful for training’ and 90% agreed that the simulator was ‘useful for hand–eye co-ordination and suturing’ [25].
Robotic surgical simulator
The RoSS was created by Simulated Surgical Systems in the USA in 2010 and costs $120,000 USD [13]. It has been shown to predict intraoperative ability [26]. Compared with no training, novices trained on the RoSS significantly reduced the time taken to complete tasks on the daVinci Surgical System (P = 0.002) [27]. Seixas-Mikelus et al. demonstrated that this system had content validity [28]. Among participants, 79% indicated that RoSS could be used for certifying in robotic surgery. Ninety-four percent responded that RoSS would be useful for training purposes [28].
RobotiX mentor
The RM is the most recent RAS VR simulator on the commercial market and was created by 3D systems in the USA. It costs $137,000 USD [31] and functions as a stand-alone simulator console. It has demonstrated face, content and construct validity [32].
Comparison of RAS simulators
The MdVT, RoSS, SEP and RM simulators are “stand-alone” platforms, meaning that it is not necessary to have the daVinci console to use the simulator. This is a strong advantage of these simulators. In many hospitals it is realistic that there would only be one daVinci console, and if it is in use it is not possible for trainees to use the dVSS or PROMIS simulators and this is a significant limitation. The simulators with the broadest range of exercises are the dvSS, RoSS and RM [18, 32, 42] (Table 4). These three platforms include exercises for needle handling, object manipulation, tissue handling/clipping, suturing and full surgical procedures. The MdVT, SEP and PROMIS are limited by their smaller range of exercises in comparison to their rivals [19, 22, 25].
Regarding the physical aspects of the platforms, the dVSS and PROMIS require the trainee to sit at the daVinci console and use the console master controllers which transmit trainee movements to virtual robotic instruments in a computer-generated environment [18, 22]. The MdVT is a 2-handed haptic system, and each controller has 3° of force feedback and 7° of tracking. The trainee views the environment in 3 dimensions through a stereo eyepiece and the simulator includes a foot pedal unit [19]. The RoSS consists of a mock-up of the dVSS console, two controllers with 6° of movement, stereo head-mounted display, pedals for clutch and camera controls, and custom-designed pinch components to simulate the EndoWrist of the dVSS [42]. The SEP simulator consists of two controllers with 7° of movement and a motion-tracking device which recreates the movements on screen in the virtual environment [25]. The RM consists of a mock-up console with stereoscopic visors, headset, foot pedals and non-fixed controllers [32]. A limitation of the SEP system is that the images are not three-dimensional [25]. One of the main advantages of the MdVT is the force feedback of the controllers [19].
Challenges with RAS simulators
Urology is at the forefront of minimally invasive surgery. Urological training must adapt to these technological advances to ensure the production of skilled trainees and, more importantly, to ensure patient safety. Trainee scheduling constraints and patient safety have led to a shift towards simulation models in surgical training.
Globally, the implementation of robotic simulation training for urological trainees remains a challenge. Our findings demonstrate a range of high-quality commercially available RAS simulators. However, most studies evaluated content and face validity with only a few assessing predictive validity. Standardisation of validity assessment of these simulators remains a challenge. Definitions of expert and novice varied across studies. Visual analogue scales used to assess content and face validity also varied. The highest level of evidence was found in one RCT by Feifer et al. [20] that evaluated ProMIS and LapSim programmes and the authors had strong evidence that favoured RAS simulation training. The lack of a widespread standardised robotic training modules and costs are among the challenges facing mentors.
It is also important to consider the cost-effectiveness of simulators. Le et al. evaluated access to simulation in urology training programs and the views of urologists on their worth [29]. The authors created an anonymous questionnaire to the program director at the 119 Accreditation Council for Graduate Medical Education accredited United States urology training programs. Access to laparoscopy, cystoscopy, ureteroscopy, transurethral resection and percutaneous access simulators was 76%, 16%, 21%, 8% and 12%, respectively. A unanimous agreement among program directors for simulation in training was advocated; however, disagreement occurred on factors such as cost-effectiveness, validity and ability of simulators to replace hands-on instruction in the operating room [29]. A systematic review on the effectiveness of simulation in urology shows that low-fidelity simulators are considered more cost-effective than high-fidelity simulators. There is a dearth of studies that have evaluated the transferability of skills from simulation to real patients [30].
The three most common commercially available VR simulators are the dVSS, RM and MdVT [31]. The MdVT was one of the first VR simulators and the RM is the latest addition to the market. The dVSS scored highest in face and content validity compared to the RM and MdVT [31]. The ProMIS is the least costly overall ($35,000), but the dVSS is the least costly ($89,000) of the commercially available simulators. Importantly, however, this cost does not include the price of the console. The dVSS can also only be used when the console is not in use in the operating room.
One of the necessary attributes of VR simulators is a demonstration that the skills acquired during simulation training can be transferred to RAS safely on patients. A systematic review by Moglia et al. assessed a number of studies regarding skills transfer from VR simulators to a daVinci robot [39]. Five RCTs and one cohort study demonstrated skills transfer from VR simulators to inanimate models. Two RCTs showed skills transfer to animal models, and just one study demonstrated skills transfer to RAS on real patients. This was a small cohort study. There is no high-quality evidence demonstrating skills transfer to the operating room [39].
Senior surgical residents have low confidence levels in performing RAS [33]. However, after 3 days of simulation training a significant increase in trainee confidence is observed [33]. There have been several attempts in recent years to develop RAS training curricula, however they have not been widely introduced due to the lack of validation studies [34]. The European Association of Urology (EAU) Robotic Urologic Section (ERUS) developed a training program and curriculum in 2015 focusing on robot-assisted radical prostatectomy. The program includes theoretical training, live case observation and tableside assistance, laboratory exercises, and modular console training [34]. Interestingly, trainees are not mandated to complete a minimum number of hours on the simulator prior to performing surgery, but they are assessed using the Global Evaluative Assessment of Robotic Skills (GEARS) validated assessment tool. Participants undergo one week of simulation training at week 5 of the curriculum and spend the following 4 months in the operating room using the dual-console system with their mentor. This curriculum has been shown to be valid, effective and acceptable [35]. One limitation of this curriculum is that only high-volume centres can provide a sufficient number of cases to achieve the goals of the curriculum [36]. There are other RAS training curricula that implement simulation training systems that are at various stages of development and implementation worldwide including; Fundamentals of Robotic Surgery at the Florida Hospital Nicholson Center, Fundamental Skills of Robotic Surgery at The Roswell Cancer Institute NY, and the Basic Skills Training Curriculum at the University of Toronto [37]. To ensure we have safe, high-quality surgeons performing RAS it is necessary for surgical educators worldwide to collaborate in implementing standardised, validated RAS curricula where simulation training forms a key part.
Conclusions
Simulation is a safe and cost-effective way of training surgeons. There are 6 RAS VR commercially available simulators but their efficacy is limited by the lack of comparative studies, standardisation of validation and high cost. Larger studies will be required to demonstrate predictive validity, and the cost of simulators will likely decrease as developers aim to compete in the commercial market. Surgical educators in urology should aim to develop a cost-effective, acceptable, validated simulator that can be incorporated into a standardised, validated RAS training curriculum for the next generation of robotic surgeons.
Abbreviations
- RAS:
-
Robot-assisted surgery
- dVSS:
-
daVinci Skills Simulator
- MdVT:
-
Mimic dV Trainer
- SEP:
-
Simsurgery Educational Platform
- RoSS:
-
Robotic Surgical Simulator
- RM:
-
RobotiX Mentor
- TURP:
-
Transurethral resection of the prostate
- TURBT:
-
Transurethral resection of bladder tumour
- RCT:
-
Randomised controlled trial
References
Abbou CC, Hoznek A, Salomon L et al (2000) Remote laparoscopic radical prostatectomy carried out with a robot. Report of a case. Prog Urol 10(4):520–523
Hoznek A (2008) History of robotic surgery in urology. In: John H, Wiklund P (eds) Robotic urology. Springer, Berlin
Guzzo TJ, Gonzalgo ML (2009) Robotic surgical training of the urologic oncologist. Urol Oncol 27:214–217
Guru KA, Kuvshinoff BW, Pavlov- Shapiro S et al (2007) Impact of robotics and laparoscopy on surgical skills: a comparative study. J Am Coll Surg 204:96–101
Gawande AA, Zinner MJ, Studdert DM et al (2003) Analysis of errors reported by surgeons at three teaching hospitals. Surgery 133(6):614e21
Rosen KR (2008) The history of medical simulation. J Crit Care 23:157–166
Kallstrom R, Hjertberg H, Svanvik J (2010) Impact of virtual reality-simulated training on urology residents’ performance of transurethral resection of the prostate. J Endourol/Endourol Soc 24(9):1521e8
Hamilton EC, Scott DJ, Fleming JB et al (2002) Comparison of video trainer and virtual reality training systems on acquisition of laparoscopic skills. Surg Endosc 16(3):406–411
Limberg AA (1984) The planning of local plastic operations on the body surface: theory and practice. DC Health and Company, Lexington
Agha RA, Fowler AJ (2015) The role and validity of surgical simulation. Int Surg 100(2):350–357
Seymour NE, Gallagher AG, Roman SA et al (2002) Virtual reality training improves operating room performance: results of a randomized, double-blinded study. Ann Surg 236(4):458–463 (discussion 463–4)
ACGME (2008) Program requirements of graduate medical education in surgery. Residency Review Committee. Accreditation Council for Graduate Medical Education, Chicago
Abboudi H, Khan MS, Aboumarzouk O et al (2013) Current status of validation for robotic surgery simulators—a systematic review. BJU Int 111(2):194–205
Brewin J, Ahmed K, Challacombe B (2014) An update and review of simulation in urological training. Int J Surg 12(2):103–108
Schout BM, Muijtjens AM, Hendrikx AJ et al (2010) Acquisition of flexible cystoscopy skills on a virtual reality simulator by experts and novices. BJU Int 105:234–239
Mishra S, Kurien A, Patel R et al (2010) Validation of virtual reality simulation for percutaneous renal access training. J Endourol 24:635–640
Amirian MJ, Lindner SM, Trabulsi EJ et al (2014) Surgical suturing training with virtual reality simulation versus dry lab practice: an evaluation of performance improvement, content, and face validity. J Robotic Surg 8:329–335
Hung AJ, Zehnder P, Patil MB et al (2011) Face, content and construct validity of a novel robotic surgery simulator. J Urol 186:1019–1024
Kenney PA, Wszolek MF, Gould JJ et al (2009) Face, content, and construct validity of dV-trainer, a novel virtual reality simulator for robotic surgery. Urology 73:1288–1292
Feifer A, Al-Ammari A, Kovac E et al (2011) Randomized controlled trial of virtual reality and hybrid simulation for robotic surgical training. BJU Int 108:1652–1656
Jonsson MN, Mahmood M, Askerud T et al (2011) ProMIS can serve as a da Vinci® simulator—a construct validity study. J Endourol 25:345–350
McDonough P, Peterson A, Brand T (2010) Initial validation of the ProMIS surgical simulator as an objective measure of robotic task performance. J Urol 183(Suppl.):e515
Shamim Khan M, Ahmed K, Gavazzi A et al (2013) Development and implementation of centralized simulation training: evaluation of feasibility, acceptability and construct validity. BJU Int 111(3):518–523
Balasundaram I, Aggarwal R, Darzi A (2008) Short-phase training on a virtual reality simulator improves technical performance in tele-robotic surgery. Int J Med Robot 4(2):139–145
Gavazzi A, Bahsoun AN, Van Haute W et al (2011) Face, content and construct validity of a virtual reality simulator for robotic surgery (SEP Robot). Ann R Coll Surg Engl 93:146–150
Guru KA, Baheti A, Kesavadas T et al (2009) In-vivo videos enhance cognitive skills for Da Vinci surgical system. J Urol 181(Suppl.):823 (abstract 2272)
Kesavadas T, Kumar A, Srimathveeravalli G et al (2009) Efficacy of robotic surgery simulator (RoSS) for the da Vinci® surgical system. J Urol 181(Suppl.):823
Seixas-Mikelus SA, Stegemann AP, Kesavadas T et al (2011) Content validation of a novel robotic surgical simulator. BJU Int 107:1130–1135
Le CQ, Lightner DJ, VanderLei L et al (2007) The current role of medical simulation in American urological residency training programs: an assessment by program directors. J Urol 177(1):288–291
Ahmed K, Jawad M, Abboudi M et al (2011) Effectiveness of procedural simulation in urology: a systematic review. J Urol 186:26–34
Hertz AM, George EI, Vaccaro CM et al (2018) Head-to-head comparison of three virtual-reality robotic surgery simulators. JSLS. 22(1):e2017.00081
Whittaker G, Aydin A, Raison N et al (2016) Validation of the robotiX mentor robotic surgery simulator. J Endourol 30(3):338–346
Schlottmann F, Long JM, Brown S et al (2018) Low confidence levels with the robotic platform among senior surgical residents: simulation training is needed. J Robot Surg. https://doi.org/10.1007/s11701-018-0853-y
Mottrie A, Novara G, van der Poel H et al (2016) The European Association of Urology robotic training curriculum: an update. Eur Urol Focus 2(1):105–108
Volpe A, Ahmed K, Dasgupta P et al (2015) Pilot Validation Study of the European Association of Urology Robotic Training Curriculum. Eur Urol 68(2):292–299
Stolzenburg JU, Qazi HA, Rai BP (2015) The European Association of Urology robotic training curriculum: the journey has only just begun. Eur Urol 68:300–301
Fisher RA, Dasgupta P, Mottrie A et al (2015) An over-view of robot assisted surgery curricula and the status of their validation. Int J Surg 13:115–123
Veneziano D, Smith A, Reihsen T, Speich J, Sweet RM (2015) The SimPORTAL fluoro-less C-arm trainer: an innovative device for percutaneous kidney access. J Endourol 29:240–245
Moglia A, Ferrari V, Morelli L, Ferrari M, Mosca F, Cuschieri A (2016) A systematic review of virtual reality simulators for robot-assisted surgery. Eur Urol 69(6):1065–1080
Roscoe SN, Williges BH (1980) Measurement of transfer of training. In: Roscoe SN (ed) Aviation psychology. The Iowa State University Press, Iowa
Kumar R, Hemal AK (2005 Oct) Emerging role of robotics in urology. J Minim Access Surg 1(4):202–210
Seixas-Mikelus SA, Kesavadas T, Srimathveeravalli G, Chandrasekhar R, Wilding GE, Guru KA (2010) Face validation of a novel robotic surgical simulator. Urology 76(2):357–360
Korets R, Mues AC, Graversen JA, Gupta M, Benson MC, Cooper KL, Landman J, Badani KK (2011) Validating the use of the Mimic dV-trainer for robotic surgery skill acquisition among urology residents. Urology 78(6):1326–1330
Funding
No funding received.
Author information
Authors and Affiliations
Contributions
JF performed project development and collected data. ND edited the manuscript. EM collected data and wrote the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest regarding the publication of this article.
Ethics statement
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1975 Helsinki Declaration and its later amendments or comparable ethical standards. This article does not contain any studies with animals performed by any of the authors.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
MacCraith, E., Forde, J.C. & Davis, N.F. Robotic simulation training for urological trainees: a comprehensive review on cost, merits and challenges. J Robotic Surg 13, 371–377 (2019). https://doi.org/10.1007/s11701-019-00934-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11701-019-00934-1