
Abstract
In this paper, first-order and second-order sliding mode controllers for underactuated manipulators are proposed. Sliding mode control (SMC) is considered as an effective tool in different studies for control systems. However, the associated chattering phenomenon degrades the system performance. To overcome this phenomenon and track a desired trajectory, a twisting, a super-twisting and a modified super-twisting algorithms are presented respectively. The stability analysis is performed using a Lyapunov function for the proposed controllers. Further, the four different controllers are compared with each other. As an illustration, an example of an inverted pendulum is considered. Simulation results are given to demonstrate the effectiveness of the proposed approaches.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Underactuated mechanical systems (UMS) are increasingly present in the robotic field. They have less actuators than their degrees of freedom. In these systems, we find manipulators, vehicles and humanoids with several passive joints. Underactuations arise by deliberate design for the purpose of reducing the weight of the manipulator or might be caused by actuator failures. The difficulty in controlling underactuated mechanisms is due to the fact that techniques developed for fully actuated systems cannot be directly used. These systems are not feedback linearizable, yet they exhibit nonholonomic constraints and nonminimum phase characteristics[1]. Moreover, it has been shown that it is not difficult to stabilize this class of systems by continuous controllers. Because of this, the class of under-actuated mechanical systems presents challenging control problems. One of the common methods used to control underactuated systems is the SMC based on Lyapunov design.
The SMC has always been considered as an efficient approach in control systems, due to its high accuracy and robustness against internal and external disturbances. The SMC approach consists of two steps. The first is to choose a manifold in the state space that forces the state trajectories to remain along it. The second is to design a discontinuous state-feedback capable of forcing the system to reach the state on the manifold in a finite time. However, the drawback of the SMC is the presence of the chattering effect, caused by the switching frequency of the control[2]. The high frequency components of the control propagating on the system can excite the unmodeled fast dynamics and therefore cause undesired oscillations. In fact, this can degrade the system performance or may even lead to instability. In the literature, three main approaches have been presented which help to reduce the chattering effects. The class of methods consist in the use of the saturation control instead of the discontinuous one. It ensures the convergence to a boundary layer of the sliding manifold. Moreover, a switching function, inside the boundary layer of the sliding manifold, was approximated by a linear feedback gain[3, 4]. However, the accuracy and the robustness of the sliding mode were partially lost.
The second class of methods consist in the use of a system observer-based approach[5]. It can reduce the problem of robust control to the problem of exact robust estimation. This can lead to the deterioration of the robustness with respect to the plant uncertainties or disturbances.
Using high-order sliding mode controllers given by Levant[6, 7] as a way to reduce the chartering phenomenon and keep the main advantages of the original approach of the SMC is another way to eliminate chattering. On the other hand, the second-order sliding mode control is relatively simple to implement and it gives good robustness to external disturbances. The second-order sliding mode control (SSMC) approach can reduce the number of differentiator stages in the controller. However, the stability proofs are based usually on a geometrical or homogeneity method since the Lyapunov function is a difficult task to define[7]. The stability and the convergence using SSMC is challenging and several trials were made to deal with those difficulties. Recently, Moreno and Osorio[8] constructed a Lyapunov function that provides a finite time convergence, a robustness and an estimate of the convergence time for super-twisting algorithm. In [9], a multivariable super-twisting structure was proposed, which analyzed the stability using the ideas of Lyapunov function given in [8].
The inverted pendulum system shown in Fig. 1 is a typical benchmark of non-linear underactuated mechanical systems[10]. For this system, the control input is the force u that moves the cart horizontally and the output is the angular position of the pendulum 6. Therefore, the inverted pendulum has been a popular candidate to illustrate different control methods. However, despite of its simple mechanical structure, this prototype is not easy to control and requires sufficiently sophisticated control designs. Indeed, it is proven that the system is not feedback linearizable and has no corresponding constant relative degree[11]. Moreover, Zhao and Spong[12] have shown that several geometric properties of the system are lost when the pendulum moves through horizontal positions. The objective consists of moving the cart from an initial position to a desired one and keeping the pendulum in the vertical position with a minimum of its oscillations around this position. In general, the main difficulty is to swing up the pendulum from the downward vertical position and to keep the cart stable. Numerous control techniques have been employed to stabilize the inverted pendulum such as proportional-integral-derivative (PID) controllers where the control gains are adjustable and updated online with a stable adaptation mechanism[13].

Inverted pendulum
The objective of this paper is to develop a robust position tracking controller based on the first-order and the second-order sliding mode approaches applied to an inverted pendulum. Stability of the closed loop system is carried out using candidate Lyapunov functions for the proposed controllers. The contributions of this paper are presenting the stability analysis of twisting and super-twisting controllers. Further, a modified super-twisting algorithm with simple stability analysis is proposed. This controller has almost the same propriety as the super-twisting algorithm. The paper is organized as follows. Section 2 describes the model of the inverted pendulum and the first sliding mode controller. Section 3 deals with the sliding mode controllers and the design of second-order sliding mode controllers. Section 4 discusses the simulation results of the proposed controllers.
2 Dynamic model and control approach for an inverted pendulum
2.1 Dynamic model
The dynamical behavior of an inverted pendulum can be described by the differential equations as[12]
where l is the length of the pendulum, m is the pendulum mass, M is the cart mass, τ is the horizontal force action, θ is the angular deviation, and y is the position of the cart which is moving horizontally.
Let x1 = y, \({x_2} = \dot y\), x3 = θ and \({x_4} = \dot \theta\). According to the canonical form of a class of underactuated systems, we can transform (1) into the following state space representation
where x = [x1, x2, x3, x4]T is the state variable vector, τ is the control input, ƒ1, ƒ2, b1 and b2 are nominal nonlinear functions, expressed as
Let
Then, (2) becomes

And (5) can be expressed by

Voytsekhovsky et al.[14, 15] proposed a method that can approximate the original system with an input-output linearizable control system in new coordinates. This stabilization method of nonlinear system using sliding mode control is based on coordinate transformation by mapping T: x ↦ ξ defined by
with ξ = (ξ1 ξ2 ξ3 ξ4)T. T is defined as a local diffeomorphism with T(0) = 0.
The dynamical system in the new coordinates can be approximated by the system model
where L ƒ h(x) is the Lie derivative of h(x) along the vector f(x).
Consider the output system function defined by[15]
with ξ = T(x) and T1(x) = h(x)= ξ1. Define the transformation T: x ↦ ξ by
Then,
Differentiating ξ, we obtain
where
By neglecting 2x4 tan(x3) because this term is o(x3, x4)2, we obtain a feedback linearizable nonlinear system in the state ξ with
2.2 First-order sliding mode controller
Define the surface, s = {ξ ∈ R4 | s(ξ)=0}, for λ> 0,
We choose z d = [2 0 0 0]T. The time derivative of s along the system trajectory ξ is equal to
The sliding mode control is expressed by
where u sw is the switching control, u eq is the equivalent control yielded from \(\dot s(\xi ) = 0\), and
where η and K are positive constants.
It is notable that for small deviations, we have \({g_e}(\xi) < - 3 - {\textstyle{q \over l}} < 0\). Choosing the Lyapunov candidate as
and differentiating V along the trajectories of (14) yields
Then, the system is stable and the convergence of the sliding mode is guaranteed.
3 Second-order sliding mode controller
The drawback of the first-order sliding mode control is the chattering phenomenon. As a solution to resolve this problem, a higher-order sliding mode (HOS) is proposed. In fact, HOS appears as an effective application to counteract the chattering phenomenon and the switching control signals, with higher relative degrees in a finite time[8, 16]. The HOS has been introduced in [6], with the goal to get a finite time on the sliding set of order r defined by \(s = \dot s = \ddot s = \dddot s = \cdots = s^{(r - 1)} = 0\). s defines the sliding variable with the r-th order sliding and with its (r − 1)-th first time derivatives depending only on the state x. The first-order sliding mode tries to keep s = 0. In the case of second-order sliding mode control, which only needs its measurement or evaluation of s, the relation should be verified as
In the following, a twisting algorithm, a super-twisting algorithm and a modified super-twisting algorithm with a prescribed convergence law are used.
3.1 Twisting controller
3.1.1 Controller approach
Consider the sliding surface
Differentiating (22) twice gives
where Ψ(ξ) = ƒ e (ξ) + 2λz(3) + λ2z(2) and ϕ(ξ) = g e (ξ).
We assume that functions Ψ and ϕ are bounded such that
where Ψ d , ϕ m , ϕ M and ϕ d are positive scalars. Then, we have
By imposing \({\ddot s_1} = 0\), the equivalent control can be expressed as \({u_{eq}} = - {\textstyle{\Psi \over \varphi}}\)
3.1.2 Stability analysis
The dynamic control law using the twisting algorithm is given by[8]
with β > 0, 0 < K ≤ K M and \({K_M} > {\textstyle{1 \over {1 - \beta}}}{\textstyle{{{\Psi _d}} \over {{\varphi _M}}}}\). The total control is defined by
The Lyapunov function can be chosen as
Differentiating (28) yields
Therefore, the system is stable if λ2 − K < 0.
3.2 Super twisting controller
SSMC controllers require the of values of the derivatives except for the super twisting algorithm (STW). The STW is a continuous sliding mode algorithm ensuring main properties of the first-order sliding mode control for systems with Lipschitz continuous matched uncertainties or disturbances with bounded gradients[7]. It has been developed to control systems with a relative degree equal to one in order to avoid chattering.
Trajectories on the two sliding planes are characterized by twisting around the origin, but the continuous control law u(t) is constituted by two terms. The first is defined by the discontinuous time derivative and the second is a continuous function of the available sliding variable[2].
3.2.1 Controller approach
The derivative of the sliding surface is given as
which can be expressed as
where Ψ1 (ξ) = f e (ξ) + 3λz(3) + 3λ2z(2) + λ3z(1).The control law can be expressed by[16]
where the super twisting controller is
Variations of the term σ are described by
where k1,⋯, k4 are positive scalars.
Substituting (32) and (33) into (31) gives
3.2.2 Stability analysis
We want to prove the stability of the system with the use of Lyapunov function candidate define by
where k5 is a positive scalar and
We introduced the positive scalar k5 for more flexible stability conditions and for more generalization of the expression of V2. Substituting (37) into (36) gives
Define the subspace as
Differentiating (38) with respect to time gives
Substituting (34) and (35) into (40) yields
Define \(X = {(\vert s{\vert ^{{\textstyle{1 \over 2}}}}s\;\sigma)^{\rm{T}}}\). Then, it is easy to show that
where

with

and

Matrices Ψ and Υ are positives definite if
So matrices Ψ and Υ are positive definite and consciously \({\dot V_2}(s,\sigma) \leq 0\). Thus, we can conclude that the system is stable.
3.3 A modified super twisting controller
To simplify the stability analysis, we propose a modified super twisting controller (MSTW).
3.3.1 Controller approach
\(\dot s\) can be expressed as
The total controller can be expressed by
where
Variations of σ1 are given by
Parameters k6, k7, k8 and k9 are positive scalars.
3.3.2 Stability analysis
For the stability proof, the Lyapunov function candidate is given by
Differentiating (51) with respect to time gives
Substituting (50) into (52) gives
4 Simulation results and discussions
Parameters of the inverted pendulum system are set as M = 20 kg, m0 = 1.8 kg, l = 0.3m, g = 9.8N/kg. The initial conditions of the cart pendulum are \(({y_0},{\dot y_0}) = (0,0),\;({\theta _0},{\dot \theta _0}) = (0.1,0)\) and the desired position is set as y d = 2, θ d = 0 and \({\dot y_d} = {\dot \theta _d} = 0\).
Simulations are done using λ =1 and k =20 for the SMC, k1 =40 and k2 = 90 for the twisting controller.
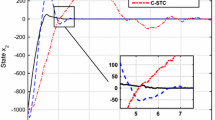
In Figs. 2 and 3, the simulation results for the four controllers are shown. The convergence of state variables has been established for all controllers. Furthermore, the state variables for STW and MSTW controllers converge faster than those of TW and SMC. 20% of mass uncertainties, have been considered for the pendulum and cart. We can notice the robust behaviors of the controllers with respect to parametric uncertainties. Figs. 4–7 show that the proposed SSMC is able to compensate effectively the chattering phenomenon better than the first-order sliding mode. Moreover, with the super-twisting controller and modified super-twisting controller, the chattering is eliminated.

Evolution of the position of θ for the uncertain system

Evolution of the position of y for the uncertain system

Evolution of sliding surface and control by SMC

Evolution of the sliding surface and the control using TW

Evolution of the sliding surface and the control using STW

Evolution of the sliding surface and the control using MSTW
For more comparisons between these approaches, we consider the following criteria
which is proportional to the energy delivered to the system.
It is clear from Table 1 that STW gives the least delivered energy, while the MSTW delivers the second compared to other approaches.
5 Conclusions
In this paper, a second-order sliding mode controller has been designed for underactuated manipulators. This controller keep the main advantages of the original sliding mode approach and removes the chattering caused by the sliding mode approach. Simulation results of the twisting, the super-twisting and the modified super-twisting controllers show that these controllers give better performance compared to the first-order sliding mode controller. It has been shown that the proposed modified super-twisting controller have almost the same properties of the super-twisting with a simple stability analysis. Moreover, the second-order sliding-mode controller is an effective tool for the control of uncertain nonlinear systems since it overcomes the main drawback of the classical sliding-mode control approach.
References
A. Isidori. Nonlinear Control Systems, Berlin, Germany: Springer Verlag, 1995.
W. Perruquetti, J. P. Barbot. Sliding Mode Control in Engineering, FL, USA: CRC Press, 2002.
J. A. Burton, A. S. I. Zinober. Continuous approximation of variable structure control. International Journal of Systems Science, vol. 17, no. 6, pp. 875–885, 1986.
H. Lee, V. I. Utkin. Chattering suppression methods in sliding mode control systems. Annual Reviews in Control, vol. 31, no. 2, pp. 179–188, 2007.
K. C. Veluvolu, Y. C. Soh, W. Cao. Robust observer with sliding mode estimation for nonlinear uncertain systems. IET Control Theory Applications, vol. 1, no. 5, pp. 1533–1540, 2007.
A. Levant. Higher-order sliding modes, differentiation and output-feedback control. International Journal of Control, vol. 76, no. 9, pp. 924–941, 2003.
A. Levant. Chattering analysis. IEEE Transactions on Automatic Control, vol. 55, no. 6, pp. 1380–1389, 2010.
J. A. Moreno, M. Osorio. Strict Lyapunov functions for the super twisting algorithm. IEEE Transactions on Automatic Control, vol. 57, no. 4, pp. 1035–1040, 2012.
I. Nagesha, C. Edwardsb. A multivariable super-twisting sliding mode approach. Automatica, vol. 50, no. 3, pp. 984–988, 2014.
I. Fantoni, R. Lozano. Non-linear Control for Underactuated Mechanical Systems, London, UK: Springer, pp. 21–42, 2002.
B. Jakubczyk, W. Respondek. On the linearization of control systems. Bult. Acad. Polon. Sei. Math., vol. 28, pp. 517–522, 1980.
J. Zhao, M. W. Spong. Hybrid control for global stabilization of the cart pendulum system. Automatica, vol. 37, no. 12, pp. 1941–1951, 2001.
W. D. Chang, R. Hwang, J. G. Chsieh. A self-tuning PID control for a class of nonlinear systems based on the Lyapunov approach. Journal of Process Control, vol. 12, no. 2, pp. 233–242, 2002.
D. Voytsekhovsky, R. M. Hirschorn. Stabilization of singleinput nonlinear systems using higher-order term compensating sliding mode control. International Journal of Robust and Nonlinear Control, vol. 18, no. 4–5, pp. 468–480, 2008.
C. Aguilar, R. Hirschorn. Stabilization of an Inverted Pendulum, Report on Summer Natural Sciences and Engineering Research Council of Canada, Research Project, Queens University at Kingston, Department of Mathematics and Statistics, 2003.
S. V. Emelýanov, S. V. Korovin, L. V. Levantovsky. Higher-order sliding modes in control systems. Differential Equations, vol. 29, no. 11, pp. 1627–1647, 1993.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Guest Editor Fernando Tadeo
Rights and permissions
About this article

Cite this article
Mahjoub, S., Mnif, F. & Derbel, N. Second-order sliding mode approaches for the control of a class of underactuated systems. Int. J. Autom. Comput. 12, 134–141 (2015). https://doi.org/10.1007/s11633-015-0880-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11633-015-0880-3