
Abstract
Introduction
Almost 10 years have passed since computer-aided, most commonly known as robotic surgery, has emerged gaining slowly but steadily its place within minimally invasive surgical procedures. Nevertheless, pancreatic surgeons only recently have started incorporating it into current practice.
Methods
In this ‘how I do it’ article, we describe our method for robotic distal splenopancreatectomy, focusing on its technical advantages, as well as its drawbacks. Furthermore, we describe some pitfalls commonly encountered during the procedure and we propose ways to avoid them.
Conclusion
Pancreatic robotic-assisted surgery is offering many practical advantages over the “classic” laparoscopic approach. Even though a difficult procedure to master, it may have the potential to establish the concept of minimally invasive surgery in areas where it is nonexistent as in pancreatic surgery.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Pancreatic surgery remains a surgical field unreceptive to minimal invasive surgical techniques. A few possible explanations for this are the already demanding technical aspects of pancreatic surgery, its high operative morbidity and the poor survival of patients with pancreatic cancer.1 Recent advances both in technology and surgical skills have made possible the endeavor of laparoscopic duodeno-pancreatectomy and laparoscopic distal splenopancreatectomy (DSP) in specialized centers.2 However, its uses are still limited by a steep learning curve and a lack of data regarding its safety regarding long-term oncologic outcome. The increasing use of computer-assisted, or as more commonly known robotic surgery, in other fields of general surgery has eventually led to the first robot-assisted pancreatic resections.3, 4 These first publications are rather optimistic, advocating that the benefits are important enough to uplift the concept of minimally invasive pancreatic surgery.
In this short report, we describe our technique for the robotic-assisted DSP, focusing on the technical aspects of the procedure.
Surgical Technique
The operation starts with patient under general anesthesia, in the supine anti-Trendelenburg position with a wedge support behind his left flank. The robotic system Da Vinci S (Intuitive Surgical, Sunnyvale, CA, USA) is placed on the upper left side of the patient. The assistant is positioned on the right side of the patient and the scrub nurse on the left. The operating theater setup is illustrated in Fig. 1.

Operating theater setup for robotic distal splenopancreatectomy. Patient supine with the right arm extended. S surgeon (at the operating console), FA first assistant, SN scrub nurse, AN anesthesiologist.
A pneumoperitoneum of 12 mmHg is achieved by placing a 12-mm optical port in the left para-umbilical area, with the Hasson technique. Six ports are used in total, placed as shown in Fig. 2. The 12 mm 30° optics laparoscope is preferred.

Port setup for robotic distal spleenopancreatectomy. 1 and 2 8-mm working ports for robot arms nos. 1 and 2. 3 8-mm port for robot arm no. 3 used for retraction. 4 12-mm optical port. A 12-mm working port for assistant. B 12-mm port for assistant (optional for retractor). The numbers correspond to the robot arm used.
After careful exploration of the peritoneal cavity and peritoneal viscera in order to rule out metastatic disease, the major omentum is retracted upwards and the lesser sac is entered as, in open surgery, through extensive division of the colo-epiploic ligament. Then the splenocolic ligament is divided and the left colic flexure is mobilized and retracted inferiorly. The posterior gastric wall is grasped by the robot arm no. 3 and retracted cephalad exposing the anterior border and the inferior margin of the pancreas.
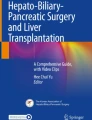
Using ultrasonic shears—Harmonic scalpel (Intuitive Surgical, Sunnyvale, CA, USA)—the peritoneum at the inferior border of the pancreas is dissected, until the superior mesenteric vein (SMV) is recognized. Then the dissection is continued cephalad, following the anterior border of the SMV (Fig. 3). The pancreas is retracted upwards by the robot arm no. 3 and blunt dissection is continued between the SMV and the posterior pancreatic surface creating a retropancreatic tunnel. A surgical tape is passed around the neck of the pancreas which is retracted upwards by the assistant facilitating the exposure of the inferior pancreatic border. The splenic–inferior mesenteric vein confluence is exposed. The proximal splenic vein is dissected free from the pancreas, and is placed on a vessel loop (Fig. 4). The pancreas is retracted caudally by the assistant, and the dissection is continued at the superior pancreatic border. The splenic artery is recognized and isolated with a vessel loop (Fig. 5). Care must be exercised to prevent inadvertent injury of the common hepatic artery during this step.

a Retropancreatic tunnel and superior mesenteric vein dissection Inlay: superior mesenteric vein and splenic vein confluence dissected. b black and white line drawing SV splenic vein, SMV superior mesenteric vein, PV portal vein.

a Splenic vein in vessel loop. The pancreas is retracted cephalad by a white tape. b black and white line drawing SV splenic vein, SMV superior mesenteric vein, PV portal vein.

a Splenic artery in vessel loop. The pancreas is retracted caudally. b black and white line drawing SA splenic artery, CHA commun hepatic artery, LGA left gastric artery.
The splenic artery is secured with three absorbable vascular clips and transected. A linear EndoGIA stapler (Covidien, Dublin, Ireland) loaded with a white vascular cartridge is used through the assistant port A to control and divide the splenic vein. Finally, the pancreas is transected by EndoGIA stapler with a vascular cartridge passed again through port A (Fig. 6). Hemostatic sutures of Prolene 5/0 or 6/0 (Ethicon, New Brunswick, NJ, USA) are placed on the pancreatic stump if necessary to secure the pancreatic duct as well as to control minor bleeding.

a Transection of the pancreatic body by a vascular stapler. b black and white line drawing.
The body and the tail of the pancreas are dissected free with the ultrasonic shears on its inferior border from the neck towards the tail. The first assistant retracts the transected distal pancreas upwards facilitating exposure. During this step the inferior mesenteric vein is encountered and transected after coagulation. Care must be taken to keep the dissection plane anteriorly of the renal fascia (Gerota’s fascia) and the left adrenal. The gastrosplenic ligament and the short gastric vessels are controlled with metal clips proximally and then coagulated and divided with the harmonic scalpel distally. With the aid of a laparoscopic fan retractor the spleen is raised upwards, exposing the splenorenal and splenophrenic ligaments that are dissected by the ultrasound shears. The specimen is placed in a 15-mm laparoscopic endo-bag and extracted through a small Pfannestiel incision. Finally, after hemostasis, a silastic drain is placed in the lesser sac at the proximity of the pancreatic stump.
Results
This technique has been used in two selected patients with pancreatic body and tail tumors. The first patient was a 58-year-old male with a history of multiple sclerosis in whom was incidentally discovered at computed tomography (CT) scan a 3.5-cm hypodense lesion of the pancreatic tail with central calcifications. The diagnosis of a nonsecreting nonmetastatic pancreatic endocrine tumor was made by a magnetic resonance imaging (MRI), an Octreoscan Scintigraphy and serum chromogranin-A level. The patient underwent Robotic DSP. The operative time was 6 h with an estimated blood loss of 350 ml. The postoperative period was uneventful except for a motor deficit of the lower limbs, attributed to the multiple sclerosis, requiring physiotherapy. He was discharged on postoperative day 14. The histological finding showed a well-differentiated pancreatic endocrine tumor with a low proliferation index (Ki-67 = 1%) without lymph node involvement (0/12).
The second patient was a 28-year-old female with a history of hyperthyroidism due to a multinodular goiter. A CT scan, performed because of a persistent high C-reactive protein level following cesarean section, discovered a 7-cm cystic lesion of the tail of the pancreas. The MRI scan showed a macrocystic lesion with internal septa, in contact with the spleen hilum. The tumor marker Ca 19-9 was normal. The patient underwent Robotic DSP. The operative time was 5 h with an estimated blood loss of 250 ml. The postoperative period was uneventful and she was discharged on postoperative day 8. The histological finding revealed a solid pseudopapillary tumor of the pancreas (pT2N0 (0/14)).
In both patients, there was no evidence of clinical, biological, and radiological pancreatic fistula (a control CT scan on postoperative day 8 did not show any abdominal fluid collection).
Discussion
A search of literature yields many articles describing the laparoscopic approach to distal pancreatectomy.5, 6 The technique has been well described, and all authors agree that it is a technically demanding operation, requiring advanced laparoscopic skills. Nevertheless, some controversy exists concerning its indications, as for some authors its safety concerning long-term oncologic outcome has not been demonstrated.1, 7
Concerning the technical aspects, robotic DSP offers many benefits in comparison to the laparoscopic approach. Primarily, hand–eye coordination is greatly facilitated by the 3D stereoscopic vision. The incorporated motion scaling and muscle tremor filters enhance the capability to perform delicate tasks such as vascular dissection even at lengthy procedures, blunting the kinetic effects of the surgeon’s fatigue.8 Furthermore, the operator, who is not sterile, is comfortably seated in front of the console with his arms and head fully supported. It should be noted that the 6° of motion that the Da Vinci S robotic arms offer, make possible the execution of both blunt and sharp dissection in a fluid manner similar to that of an open surgical procedure.9 Interestingly, the surgeon to robot interface resembles in many ways the hand and wrist movements performed during open surgery. In our experience, both the dissection of the splenic vein and artery as well as the creation of the retropancreatic tunnel were more easily feasible with the Da Vinci system in comparison to laparoscopy. Similar advantages are evident during the handling of suture needles and the practice of endocorporeal knots. Finally, the control of the robotic camera by the surgeon guarantees image stability and handling of the image field.
But as with all newly methods, several pitfalls may also be encountered during the procedure. Primarily, the setup of the robotic arms necessitates good spatial planning and is time consuming, especially at the beginning of the learning curve.9 The placement of the robot on the upper left side of the patient necessitates displacement of the anesthesiology equipment towards the patient’s upper left side. This impedes the anesthesiologist’s access to the patient’s head and left arm. Similarly uneasy is the position of the first assistant; his arms are between the robotic arms, requiring constant counterpoise to their movement. The lack of haptic and force feedback is evident but for the most part is counterbalanced by the beneficial effect of the stereoscopic vision.8 Unfortunately, not all of the robot appendages offer 6° of motion. The ultrasonic shears works with only 3° of motion making its application ungainly in the mobilization of the splenic ligaments due to the extreme angle of dissection. Moreover, in order to change the operating table tilt to a steeper right anti-Trenelenburg position to facilitate the exposure of the splenic ligaments the robot arms have to be retracted and placed anew. As such the robot setup partly negates the possibility to achieve intestinal shift by constant by tilting the patient; a trick commonly used in laparoscopic surgery. Finally, utilization of the console interface requires superior psychomotor skills, as the surgeon has in his disposition two master controls operated by the thumb and index finger of each hand and five foot pedals. The above drawbacks compiled, make this procedure rather demanding, with a steep learning curve.
In conclusion, the use of robotic-assisted systems in pancreatic surgery is promising, even though its long-term oncologic results is yet to be investigated.10, 11 In our experience it offers many advantages in the context of distal splenopancreatectomy even though it has a difficult learning curve. If haptic and force feedback interfaces become available in the future, robotic-assisted surgery will stride many steps closer to the open surgical experience. For now, the development of this technology along with the training of surgeons in its use will most likely yield important benefits for the minimally invasive pancreatic surgery.
References
Melvin WS. Minimally invasive pancreatic surgery. Am J Surg 2003;186:274–278.
Dulucq JL, Wintringer P, Mahajna A. Laparoscopic pancreaticoduodenectomy for benign and malignant diseases. Surg Endosc 2006;20:1045–1050.
Giulianotti PC, Coratti A, Angelini M, Sbrana F, Cecconi S, Balestracci T, et al. Robotics in general surgery: personal experience in a large community hospital. Arch Surg 2003;138:777–784.
Melvin WS, Needleman BJ, Krause KR, Ellison EC. Robotic resection of pancreatic neuroendocrine tumor. J Laparoendosc Adv Surg Tech A 2003;13:33–36.
Corcione F, Marzano E, Cuccurullo D, Caracino V, Pirozzi F, Settembre A. Distal pancreas surgery: outcome for 19 cases managed with a laparoscopic approach. Surg Endosc 2006;20:1729–1732.
Khanna A, Koniaris LG, Nakeeb A, Schoeniger LO. Laparoscopic spleen-preserving distal pancreatectomy. J Gastrointest Surg 2005;9:733–738.
Borja-Cacho D, Al-Refaie WB, Vickers SM, Tuttle TM, Jensen EH. Laparoscopic distal pancreatectomy. J Am Coll Surg 2009;209:758–765; quiz 800.
Giulianotti PC, Sbrana F, Bianco FM, Elli EF, Shah G, Addeo P, et al. Robot-assisted laparoscopic pancreatic surgery: single-surgeon experience. Surg Endosc.
Palep JH. Robotic assisted minimally invasive surgery. J Minim Access Surg 2009;5:1–7.
Machado MA, Makdissi FF, Surjan RC, Abdalla RZ. Robotic resection of intraductal neoplasm of the pancreas. J Laparoendosc Adv Surg Tech A 2009;19:771–775.
Vasilescu C, Sgarbura O, Tudor S, Herlea V, Popescu I. Robotic spleen-preserving distal pancreatectomy. A case report. Acta Chir Belg 2009;109:396–399.
Author information
Authors and Affiliations
Corresponding author
Additional information
The authors indicated no potential conflicts of interest.
Rights and permissions
About this article
Cite this article
Ntourakis, D., Marzano, E., Lopez Penza, P.A. et al. Robotic Distal Splenopancreatectomy: Bridging the Gap Between Pancreatic and Minimal Access Surgery. J Gastrointest Surg 14, 1326–1330 (2010). https://doi.org/10.1007/s11605-010-1214-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11605-010-1214-y