
Abstract
Rockburst is divided into two types, one is strain-type resulting from rock damage and another is sliding-type resulting from fault slip events. Triggering mine pillar rockburst mainly consists of two steps: the occurrence of shear-band and the application of disturbance. In this paper, mechanical model of mine pillar subjected to uniaxial compression is established. By simplifying the complete stress–strain curve and the crack propagation behaviour, based on the derived energy expressions corresponding to different crack propagation stages, the type of rockburst that the disturbance-induced pillar instability belongs to is defined. Next, by establishing the model of mine pillar with one inclined shear-band and by simplifying the stress evolution on the band, based on the necessary physical characteristics for triggering dynamic events, the basic mechanical property of mine pillar required for triggering instability is derived. It shows that the post-peak modulus greater than or equal to the pre-peak modulus is the basic mechanical property required for triggering mine pillar instability. Finally, by conducting laboratory experiments, the proposed model is verified. The requirement that the post-peak modulus is greater than or equal to the pre-peak modulus may be the reason why triggered mine pillar rockburst is not often observed.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Rockburst is a transition process from one equilibrium to another, accompanied with dramatic release of residual energy in the form of stress wave (Tan 1987; Ryder 1988; Linkov 1992; Salamon 1993; Qian 2014). Therefore, rockburst leads to serious threat to both the staff life and the engineering safety. Until now, much attention has been paid to the study of rockburst (Tan 1987; Li et al. 2007a; Stacey 2013; Jiang et al. 2014; Qian 2014; Wang et al. 2016). Researchers, such as Tan (1987), Ryder (1988), Linkov (1992), Salamon (1993), Stacey (2013), divided the rockburst into two types: the strain-type rockburst resulting from rock damage and the sliding-type rockburst resulting from fault slip events. Compared with strain-type rockburst, the sliding-type rockburst can often be triggered by disturbance: however, study towards the sliding-type rockburst is inadequate and its mechanism is still unclear (Qian 2014). Therefore, study on sliding-type rockburst is meaningful and necessary.
Large numbers of mine pillars, which are subjected to long-term static load, are reserved in the gob to help support the gravity of overlying strata and to help maintain the surface stability. In situ observations show that disturbances induced by mining or blasting often lead to sudden instability of mine pillar (i.e., the rockburst) (Tan 1987). The instability of mine pillar may result in surface subsidence and threaten seriously both the staff life and engineering safety. Therefore, the analysis of mine pillar instability is necessary and important. Based on the catastrophic theory, the effects of pillar stiffness and pillar size on pillar instability are analyzed and the critical stress corresponding to pillar instability is deduced (Wang et al. 2006; Wang and Miao 2006; Li and Cao 2006; Lu et al. 2015). The essence of catastrophic theory is to establish the system’s potential energy equation and then obtain the critical values by taking the derivative of the potential energy equation. The catastrophic theory, although helpful for understanding the phenomenon of instability, as a mathematical method, cannot reveal the effects of static load and dynamic load on pillar instability.
Numerical simulations show that long-term static load leads to the emergence of shear-band on mine pillar and the instability is the result of excessive sliding on the band (Wang et al. 2003). Therefore, the instability of mine pillar is only attributed to long-term static load, the effect of dynamic load on instability is not considered. Lu et al. (2015) realized the effect of dynamic load on mine pillar; through numerical simulation, he showed that dynamic load can obviously affect the stress evolution and leads to the increase of surface subsidence. Li et al. (2007a) conducted experiment on mine pillar that is simultaneously subjected to dynamic and static loads. The results show that dynamic load will increase the plastic deformation and the increase of static load can obviously increase the effects of dynamic load. Therefore, Li et al. (2007b) predicted that the instability of single pillar may lead to the instability of group pillars and result in catastrophic events. Although it has contributed greatly to our understanding of the mine pillar instability, the conclusions drawn from the numerical simulation are mainly based on the analyses of the simulation results, such as the stress and strain contours; thus, it is phenomenological and its reference value for practical engineering is limited.
In fact, the effects of static load and dynamic load on the instability of mine pillar are different (Landau and Lifshitz 2013; Qian 2014; Wang et al. 2016). Long-term static load leads to the decrease of pillar strength (Yang et al. 2015), and consequently the pillar may reach its critical state. Compared with the static load, the dynamic load often acts as a trigger. The common feature of triggering dynamic events such as earthquake and rockburst is believed to be that the long-term static load results in large amounts of energy stored in the system. However, the dynamic load often leads to part of the stored energy release and compared with the released energy, the energy applied by the dynamic load is tiny and negligible (Tan 1987; Hill et al. 1993; Xia et al. 2004; Johnson and Jia 2005; Qian 2014).
Tan (1987), based on the failure mechanism of brittle rocks and the statistical results of practical engineering, pointed out that the rocks can transform from stability to instability while affected by disturbance induced by mining or blasting. Therefore, he stressed that attention should be paid to the triggering effects of dynamic load on the occurrence of rock burst. Interestingly, analyses of two earthquakes in the northern Italy show that both the two events are triggered by disturbance caused by the release of high-stressed carbon dioxide (Johnson and Jia 2005). Johnson and Jia (2005) also emphasized the important effects of dynamic disturbance on triggering instability. He stressed that a weak zone or low-friction zone exists in the system and the stress state in the zones reach the critical state are the basic premises for triggering dynamic events. These conclusions which are drawn from the study of earthquake provide a valuable reference for us to study the instability of mine pillar with shear-band.
As aforementioned, when investigating the mechanism of rockburst, attention is mainly paid to the effects of loads. However, the required mechanical property of mine pillar, to some extent, is often ignored and thus leads to lack of study. In fact, whether the rockburst could be triggered or not is not only related to the load conditions, but also has direct relation with the mechanical property of the mine pillar itself. Johnson and Jia (2005), although they have presented the premises closely related to the system itself, have raised the question whether we can derive the basic mechanical property of system required for triggering mine pillar rockburst.
In this paper, different from the aforementioned studies, our attentions are mainly paid to the system itself; we will try to derive the mechanical property required for triggering mine pillar rockburst from the theoretical point of view. Thus, the following analyses are organized as follows: In the first section we will try to analyze the type that the triggered mine pillar rockburst belongs to; in the second section, we will deduce the basic mechanical property required for triggering mine pillar rockburst.
Premises of mechanical property for triggering mine pillar rockburst
In fact, special conditions are required for triggering mine pillar rockburst; therefore, in this section, we will try to answer what type of rockburst does the triggered mine pillar rockburst belongs to. As shown in Fig. 1, the failure of pillar is assumed to be the results of growth of large numbers of micro-cracks. When subjected to long-term static load, M g, even the stress intensity factor at crack tips, is less than the fracture toughness; the cracks will still undergo subcritical growth (Atkinson 1992; Hoek and Martin 2014; Zhou et al. 2014). After a long period of growth, at the end of the subcritical growth stage, the crack length will increase to the critical length l c from the initial length l 0. When the critical length is reached, the cracks will enter into the unstable dynamic growth stage (Horii and Nemat-Nasser 1985). If a dynamic disturbance, F, is suddenly applied to the pillar at special moment, for that the crack growth is an energy-driven process; therefore, the energy provided by the disturbance may further increase the crack growth rate and decrease the time taken for the pillar failure. Next, based on the fracture mechanics and some necessary assumptions, we will try to analyze the aforementioned processes theoretically.

Possible failure model of pillar subjected to static load and dynamic disturbance
As shown in Fig. 2, the crack growth state can be estimated through the corresponding relations between crack growth and the stress–strain state (Cai et al. 2004; Cai 2010; Hoek and Martin 2014). As shown in Fig. 2, from the view of fracture mechanics, the failure of rock which is caused by the crack growth can be divided into three typical stages: (1) crack closure stage, in which the rock volume slightly decreases and the corresponding initial stress is denoted by \(\sigma_{\text{cc}}\); (2) stable crack growth stage, in which the crack increases slowly to the critical length \(l_{\text{c}}\) and the corresponding initial stress is denoted by \(\sigma_{\text{ci}}\), where \(\sigma_{\text{ci}} = k_{1} \sigma_{\text{c}} = (0.4 - 0.6){\kern 1pt} {\kern 1pt} \sigma_{\text{c}}\), \(\sigma_{\text{c}}\) is the compressive strength; (3) unstable crack growth till compressive strength reached: in this stage, rock damage occurs and rock modulus decreases slightly; the initial stress of this stage is \(\sigma_{\text{cd}}\), where \(\sigma_{\text{cd}} = k_{2} \sigma_{\text{c}} = \left( {0.7 - 0.9} \right){\kern 1pt} {\kern 1pt} \sigma_{\text{c}} .\)

Relationship between crack behavior (above) and energy density (below)
The behavior of single crack is complex enough and to simultaneously describe the behavior of a set of cracks is almost impossible. Therefore, in this paper, we will try to analyze the rock failure based on the simplified stress–strain curve and the corresponding energy state.
In order to simplify the analyses, the rock modulus corresponding to the simplified stress–strain curve in Fig. 2 is divided into three stages: (1) rock modulus \(E_{ 0}\), the stress increase from 0 to \(\sigma_{\text{cd}}\) and there is no rock damage in this stage; (2) rock modulus \(E_{1}\) (where \(E_{1} < E_{0}\)), the stress is greater than \(\sigma_{\text{cd}}\) but less than the compressive strength, \(\sigma_{\text{c}}\), and rock damage occurs; (3) rock modulus \(E_{2}\): the stress exceeds the compressive strength, \(\sigma_{\text{c}}\) and the rock enters into the post-peak stage. Based on whether the rock will undergo gradual weakening or sudden failure in the post-peak stage, the rock behavior can be divided into two types (Cook 1965), of which, type I refers to the rock that undergoes gradual weakening in the post-peak stage and type II refers to the rock that does not belong to type I.
Take the plane strain model as an example, the energy density of the rock corresponding to the crack initiation, rock damage emergence and the compressive strength is reached can be expressed as \(U_{1}\), \(U_{2}\) and \(U_{3}\), respectively
In this paper, the rock is assumed to consist of rock matrix and cracks. There is no crack propagation before crack initiation stress, \(\sigma_{\text{ci}}\) is reached, therefore, the energy exerted by the compression is assumed to be completely absorbed by the rock matrix. The crack will undergo stable growth when the stress is larger than \(\sigma_{\text{ci}}\) but less than \(\sigma_{\text{cd}}\). Assume that the crack number in per unit volume is \(N_{0}\), the initial crack length and critical crack length are denoted by \(l_{0}\) and \(l_{\text{c}}\), respectively. The crack will enter into the unstable dynamic growth stage while the crack length is greater than \(l_{\text{c}}\). If we denote the energy increase of rock caused by the growth of crack of unit length as \(\varOmega_{\text{e}}\), then, the equilibrium equation of energy in pre-peak stage can be expressed as (Klein and Reuschle 2004)
Based on Eq. (1), the expressions in Eq. (2) are as follows:
where \(V = Lh\) is the pillar volume in plain model; \(W_{\text{S}}\), \(W_{\text{Y}}\) and \(W_{C}\) are the energy absorbed by the rock, the rock matrix and the cracks when the stress is \(\sigma\) (\(\sigma \le \sigma_{\text{c}}\)); \(l\) is crack length corresponding to \(\sigma\); \(E_{\text{m}}\) denotes the modulus of rock matrix, \(E_{\text{b}}\) is the equivalent pre-peak modulus of rock, \(E_{1}\) is rock modulus in pre-peak stage after damage emergence; \(E_{0}\) is rock modulus in pre-peak stage before damage emergence, where \(E_{\text{m}} \ge E_{0} > E_{\text{b}} > E_{1}\).
The rock is assumed to be still in equilibrium when the stress increases from \(\sigma_{\text{ci}}\) to \(\sigma\) (\(\sigma_{\text{ci}} \le \sigma \le \sigma_{\text{cd}}\)); the energy absorbed by the rock mass \(W_{\text{S1}}\) and rock matrix \(W_{\text{Y1}}\) is
Therefore, the energy, \(W_{\text{C1}}\), consumed by the crack growth during this period is
While \(\sigma\) reaches \(\sigma_{\text{cd}}\), Eq. (5) can be expressed as
Based on Eqs. (6), (3), the energy, \(\varOmega_{\text{e}}\), consumed by the increase of crack of unit length is
If \(\sigma\) is greater than \(\sigma_{\text{cd}}\), the cracks enter into the unstable dynamic growth stage and macro cracks start to occur. Based on Eq. (4), \(W_{\text{S2}}\) absorbed by the rock and \(W_{\text{Y2}}\) absorbed by the rock matrix from the occurrence of rock damage to the compressive strength \(\sigma_{\text{c}}\) is reached and can be expressed as
Based on Eq. (8), the total energy, \(W_{\text{C2}} ,\) consumed by the cracks during the unstable crack growth stage is
Therefore, the increase of the crack length, \(l_{\text{d}}\), during the unstable crack growth stage is
Substituting Eqs. (7) and (9) into Eq. (10), we have
Therefore, the total increase of single crack, \(l_{\text{tot}}\) during the whole crack growth stage (including stable and unstable crack growth stages) is
The energy, \(W_{\text{Ct}} ,\) consumed by the cracks during the whole crack growth stage (including stable and unstable crack growth stages), is
During the whole crack growth stage, the stress intensity factor is a variable; in order to simplify the analyses, we introduce the concept of equivalent stress intensity factor and denote it as \(K_{\text{i}}\). Therefore, the equivalent stress intensity factor, \(K_{\text{i}} ,\) in pre-peak stage can be obtained based on energy equilibrium and has the following form:
Since the stress intensity factor at any moment of the pre-peak stage can be expressed based on \(K_{\text{i}}\), the introduction of equivalent stress intensity factor is helpful for simplifying our following analyses. Based on the above analyses, the disturbance is assumed to be applied to the pillar at the moment that \(\sigma_{\text{c}}\) is reached, i.e., the moment that the pillar is in the critical state. Assume that the stress intensity factor, \(K_{\text{it}}\), at the moment the stress reaches the compressive strength, \(\sigma_{\text{c}}\), can be expressed as
where \(\eta > 0\): while subjected to uniaxial compression, the crack propagation mode is mainly tension and expansion; therefore, the fracture toughness, \(K_{{{\text{I}}C}}\) has the following form:
Kachanov (1986) and Cotterell and Rice (1980) argued that the crack propagation mode in rock is not single, and may simultaneously include three modes. Therefore, the effective fracture toughness, \(K\) can be expressed as (Hoek and Martin 2014)
While based on maximum stress criterion, \(\kappa = \sqrt 3 /2\); while based on maximum strain criterion, \(\kappa = \sqrt {{{3(1 - v)} \mathord{\left/ {\vphantom {{3(1 - v)} {(2 + 2v - v^{2} )}}} \right. \kern-0pt} {(2 + 2v - v^{2} )}}}\); while based on maximum energy release rate criterion, \(\kappa = 1\). Therefore, when \(\sigma\) reaches \(\sigma_{\text{c}}\), i.e., the total length of single one crack is \(l_{0} + l_{\text{tot}}\); the maximum fracture toughness \(K_{\hbox{max} }\) can be expressed as
Substituting Eq. (12) into Eq. (18), we obtain the maximum fracture toughness: \(K_{\hbox{max} }\)
Assume that a disturbance whose equivalent static stress can be denoted by \(\Delta \sigma\)(\(\Delta \sigma \to 0\)) is applied to the pillar at the moment that the compressive strength, \(\sigma_{\text{c}}\) is reached (as aforementioned, the rock is in critical state when \(\sigma_{\text{c}}\) is reached), and then the stress of the pillar reaches \(\sigma_{\text{c}} + \Delta \sigma\). At this moment, the energy increase in the rock and the energy consumed by the cracks corresponding to the stress increase from \(\sigma_{\text{c}}\) to \(\sigma_{\text{c}} + \Delta \sigma\) are tiny enough and negligible. However, if there exists the relationship, \(K_{\text{it}} \ge K_{\hbox{max} }\), the crack growth will continue; thus, the weak disturbance may trigger the instability of pillar.
As the stress increases from \(\sigma_{\text{c}}\) to \(\sigma_{\text{c}} + \Delta \sigma\), although the increase of crack length can be ignored, it should be noted that the pillar will enter into the post-peak stage and the rock modulus will be the post-peak modulus. Hence, the modulus, E 1 in Eq. (15) should be replaced by E 2, and the stress intensity factor, \(K_{\text{ite}}\), corresponding to stress \(\sigma_{\text{c}} + \Delta \sigma\), will be
Comparing Eq. (15) with Eq. (20), we can see that if the stress increases from \(\sigma_{\text{c}}\) to \(\sigma_{\text{c}} + \Delta \sigma\), E 1 will be replaced by \(\left| {E_{2} } \right|\); thus, the changes of stress intensity factor may be obvious. In order to simplify the analysis, before the occurrence of rock damage, the modulus of rock matrix can be approximated by the rock modulus; hence, we use E 0 to replace E m. Therefore, based on the relationship \(K_{\text{ite}} \ge K_{\hbox{max} }\) and Eqs. (19), (20), the condition required for triggering pillar instability with weak disturbance is
where \(E_{0}\) is the rock modulus before damage emergence.
According to the existing studies (Qian 2014; Wang et al. 2016), the essence of triggering instability is maintaining the self-sustained failure with energy released by the system itself. The role of weak disturbance is a trigger, which will induce the system’s energy release and energy transformation. The requirement for this characteristics is the rock’s post-peak modulus, which is greater than zero (Tarasov and Potvin 2013); thus, \(\left| {E_{2} } \right| = E_{2}\). Let us denote the equivalent pre-peak modulus of rock as \(E_{\text{b}}\), and there will be \(E_{\text{b}} /E_{2} \le E_{0} /E_{2}\). In order to further simplify Eq. (21), we introduce \(\delta\) to represent the maximum open of the crack during the stable crack growth stage. The crack open, \(\delta\), the critical crack length, \(l_{\text{c}}\), and the increase of crack length, \((l_{\text{c}} - l_{0} )\), will have the same order of magnitude; thus
where \(l_{\text{c}} /\delta \sim \left( {10\sim 100} \right)\), \(\Delta V\sim \left( {10^{ - 5} \sim 10^{{ - {\kern 1pt} {\kern 1pt} 4}} } \right)\) is the volume increase during the stable crack growth stage, which is tiny enough when compared with \(\left( {k_{2}^{2} - k_{1}^{2} } \right) \approx 0.4\). Equation (22) also shows that the introduction of \(\kappa\) and \(\eta\), namely, although the stress intensity factor and the fracture toughness are neither uncertain, the final conclusion is unchanged. Therefore, the mechanical property required for triggering mine pillar instability is
Equation (23) shows that, if the pillar instability can be triggered by weak disturbance, it is required that the post-peak modulus is greater than or equal to the pre-peak modulus.
Based on large numbers of experimental studies, Tarasov and Potvin (2013) have drawn the conclusion that if the post-peak modulus is greater than or equal to the pre-peak modulus, the rock is super-brittle and it can undergo self-sustained failure under uniaxial compression. In fact, as aforementioned, the essence of triggering instability is the self-sustained failure triggered by weak disturbance, and the effects of weak disturbance help transforming the system’s potential energy into kinetic energy (Wang et al. 2015, 2016). It is shown that our conclusion derived theoretically, which is denoted by Eq. (23), is the same with the conclusions proposed by Tarasove and Potvin.
Interestingly, the experimental study of Tarasov and Potvin (2013) also showed that the phenomenon corresponding to the mechanical property that the post-peak modulus is greater than zero is the occurrence of shear-band when subjected to uniaxial compression, and the final failure of these rocks is the result of excessive sliding along the shear-band. Therefore, the triggered instability of mine pillar can belong to sliding-type. Hence, our following analyses of pillar instability triggered by weak disturbance will start from the establishment of a pillar with an inclined shear-band and the assumption that the stress state on the shear-band is in its critical state.
In fact, the studies of large numbers of earthquake and sudden dynamic events all show that when investigating these problems, more attention should be paid to the shear-band, the weaker zone and the fault (Lastakowski et al. 2015; Johnson and Jia 2005; Gomberg et al. 2001). This really provides valuable references for us to study the induced mine pillar instability which is caused by excessive sliding on shear-band in the following section.
Triggering instability of mine pillar with single shear-band
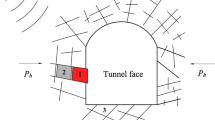
As shown in Fig. 3, the mine pillar is in unit thickness, with its height and width shown in \(h\) and \(L\); when subjected to long-term static load, a shear-band with its dip angle in \(\beta\) occurs. Assume that the stress state on the shear-band is in critical state and the pillar will undergo sliding-type instability when triggered by weak disturbance. Johnson and Jia (2005) pointed out that three conditions are simultaneously required for triggering dynamic events: (1) a weaker zone in the system; in this paper, the shear-band is the weaker zone in pillar; (2) stress state in weaker zone reaches the critical state; in this paper, it is assumed that the shear-band is in its critical state; (3) the order of strain induced by disturbance is greater than 10−6, which is mainly due to that the transition from static friction to dynamic friction requires a certain amount of cumulative displacement.

Sliding-type instability of pillar (slippage y 1 corresponding to A 1 in Fig. 5)
As shown in Fig. 3, the total axial deformation of pillar consists of the roof displacement, Y, the elastic deformation of pillar, y e and the axial component of sliding, y
The occurrence of shear-band in pillar takes very long time; thus, the thermal effects in this process is negligible. Assume that the energy consumed by the shear-band is only related to sliding and the energy consumed is stored as potential energy on shear-band. Therefore, the total potential energy of the pillar consists of the gravity potential, the energy consumed by the shear-band and the elastic potential energy:
where \(M_{\text{g}}\) is the roof gravity, v is Poisson’s ratio, \(E/(1 - v^{2} )\) is modulus of plane model, \(y_{\text{e}} /h\) is the axial elastic strain of pillar, Lh is the pillar volume in plane model.
In practical engineering, the total roof displacement can be obtained by monitoring and it can be regarded as a known quantity here; thus, the total potential energy will be function of variables, y e and y. Simplifying Eq. (25) as an expression containing single one variable and based on the minimum potential energy principle, let \(\partial W/\partial y = 0\); then we have
where \(\lambda = \frac{E}{{1 - v^{2} }}\sin^{2} \beta \cos \beta > 0\); \(U^{\prime}(y) = \partial U(y)/\partial y\) represents the shear stress on shear-band; for that the area of shear-band in plane model is \(L/\cos \beta\), which has the same expression as the length of shear-band. Therefore, based on Eq. (26), the force, Q, which drives the pillar sliding, can be expressed as
where \(K = - \lambda L/h\cos \beta < 0\), \(Q_{0} = \lambda LY/h\sin \beta \cos \beta\); when y = 0, \(Q_{0}\) can be also expressed as \(Q_{0} = (M_{\text{g}} \sin \beta )L/h\). The direction of Q is shown in Fig. 4a1; the decrease of Q with the increase of y is shown in Fig. 4a2.

Evolution of R and Q on the shear-band
The force, R, which resists the pillar sliding, is determined by the shear stress, \(\tau\). Figure 4a3 shows the direction of \(\tau\), and Fig. 4a4 shows the relationship between \(\tau\) and the shear strain, γ. \(\tau\) increases from 0 to \(\tau_{\text{s}}\) with the increase of γ from 0 to \(\gamma_{\text{s}}\), and then decreases to \(\tau_{d}\) with γ increasing from \(\gamma_{s}\) to \(\gamma_{d}\). The shear-stress is assumed to be unchanged when the shear strain is greater than \(\gamma_{\text{d}}\). According to \(\tau = G\gamma\), we can deduce that \(\tau (L/\cos \beta ) = G\gamma (L/\cos \beta )\); thus, \(R = Gy\)(as shown in Fig. 4a5, a6). Where \(R_{\text{s}} = \tau_{\text{s}} (L/\cos \beta )\), \(R_{\text{d}} = \tau_{\text{d}} (L/\cos \beta )\); \(G_{1}\) and \(G_{2}\) are the pre-peak and post-peak shear moduli, respectively.
In fact, special conditions are required for triggering sliding-type mine pillar instability. The typical relationships between R and Q are shown in Fig. 5. Pillar instability is assumed to occur when the sliding is greater than y d .

Relationship between R and Q on the shear-band
As shown in Fig. 5, intersection A 1 denotes that Q and R are equal for the first time; in this case, the stress state on shear-band is in critical state, which is the beginning of triggering pillar instability. As shown in Fig. 5a7, there is no intersection besides A 1; in this case, from A 1 to A d, R is always greater than Q, and thus, the pillar is stable. However, as shown in Fig. 5a8, besides A 1, there is another intersection, A 3, which is located in the post-peak stage; in this case, the pillar may undergo self-sustained failure with appropriate energy inputted (the inputted energy is consumed by sliding from A 1 to A 3, and it can be approximately estimated by the area A 1 A 2 A 3 as shown in Fig. 5a8). For that R is greater than Q from A 1 to A 3, while less than Q from A 3 to A d; thus, when A 3 is exceeded, self-sustained sliding will occur, i.e., mine pillar instability can be induced by disturbance. Next, we will try to derive the conditions corresponding to the aforementioned two cases.
As shown in Fig. 5a6, the expression of R is
Based on the aforementioned statements and \(\left| K \right| = G_{1}\), the conditions corresponding to the state of pillar can be expressed as
As aforementioned, let us denote the pre-peak and post-peak moduli as E b and E 2, respectively, and then Eq. (29) can be further simplified as
Interestingly, the mechanical property required for triggering mine pillar instability derived based on the above two models in Sects. “Premises of mechanical property for triggering mine pillar rockburst” and “Triggering instability of mine pillar with single shear-band” are the same. Considering that the occurrence of shear-band (corresponding to the occurrence of weak zone) is the premise of triggering instability, and the pillar with stress state on shear-band in its critical state is the beginning of triggering instability (corresponding to stress state on weak zone is in critical state). Therefore, the post-peak modulus greater than or equal to the pre-peak modulus is the basic mechanical property required for triggering mine pillar instability.
Verification of proposed model
In order to verify the model proposed in this manuscript, experiments are conducted, and the schematic diagram of the experiment is shown in Fig. 6. The disturbance-induced instability is studied in incoherent, frictional interfaces held together by uniaxial compression, \(p_{\text{s}}\). The interface, which represents the shear-band in our experiment, is inclined at an angle, \(\beta\) to the horizontal direction. The super-brittle quartzite specimen, with Young’s modulus \(E = 55.7\;{\text{GPa}}\), Poisson’ ration \(v = 0.15\) and density \(\rho = 2680\;{\text{kg/m}}^{3}\) is adopted in our experiment. The carefully prepared interfaces has a measured static friction coefficient \(\mu_{\text{s}} = 0.6\), which is estimated by finding critical angle for triggering dynamic instability, and the dynamic coefficient is estimated to be \(\mu_{\text{d}} = 0.2\). The sizes of the quartzite specimen are \(L \times b = 200\;{\text{mm}} \times 1 0 0\;{\text{mm}}\), \(h_{1} = 400\;{\text{mm}}\), \(h_{2} = 350\;{\text{mm}}\); therefore, \(\beta \approx 14^{ \circ }\). The mass of the block above the interface is \(m = 20.1\;{\text{kg}}\). If \(\beta\) is too large, the static balance is difficult to maintain, and if \(\beta\) is too small, the instability would not be triggered. The critical angle for triggering instability is estimated to be \(\beta = 10^{ \circ } - 15^{ \circ }\). The stresses tangential to and perpendicular to the interface, as shown in the lower part of Fig. 6, are denoted by \(f\), \(F_{\text{a}}\) and \(F_{\text{p}}\), respectively.

Diagram of triggering sliding instability of mine pillar with external disturbance
where \(\varSigma F = M_{\text{g}} + p_{\text{s}} bL\).
The disturbance force, \(F(t) ,\) is applied by the generator as shown in Fig. 6; the energy of disturbance is calculated by dealing the force–time curve with MATLAB software, and the (cumulative horizontal) displacement of the above block is monitored by the displacement monitor. With a given inclined angle \(\beta\), the critical displacement before instability is determined by both the disturbance energy and the compression, \(p_{\text{s}}\).
Figure 7 reflects two phenomena: (1) with a given disturbance energy, the displacement will increase with the compression, where \(p_{\text{s}}\) is increased; (2) under the same compression, the larger the disturbance energy, the larger the cumulative displacement: however, the smaller the critical displacement for instability. In order to see the second phenomenon clearly, we conducted another experiment with smaller disturbance energy. As shown in Fig. 8, the relations among the compression, the disturbance energy and the displacement reflected by the above two figures are the same.

Curves of horizontal displacement

Curves of horizontal displacement with low disturbance energy and low compression
In fact, it is not difficult to understand the first phenomenon, but the second one is really confusing. Because based on Eq. (31), the larger the compression, \(p_{\text{s}}\), the larger the friction, \(f\) will be, thus; more energy will be consumed in the same sliding distance. It is obvious that the second phenomenon reflected in the above figures is inconsistent with the analysis based on Eq. (31); thus, we can guess that the application of disturbance will obviously influence the evolution of normal stress on the interface, we can also guess that the disturbance will induce rebound in the normal direction of the shear-band. Larger \(p_{\text{s}}\) will result in larger amount of elastic energy stored in the shear-band and thus, the larger the disturbance-induced rebound may be. However, they are just preliminary guesses; the systematic study of the mechanism underlying the above phenomena is outside the scope of this manuscript and we will try to present it in another manuscript in the future.
Conclusions
In this paper, two plane models are established, of which, one is the mine pillar with large numbers of cracks, and another is the mine pillar with single shear-band. With appropriate assumptions, the basic mechanical property required for triggering mine pillar instability is separately derived based on the above two models. Based on our analyses, the following conclusions are drawn:
-
(1)
When attributing the instability of mine pillar to the induced unstable crack growth, if the post-peak modulus is greater than or equal to the pre-peak modulus, the instability can be triggered if a weak disturbance is applied to the pillar in its critical state.
-
(2)
If the post-peak modulus is larger than or equal to the pre-peak modulus, the disturbance-induced sliding on shear-band can cause the instability of mine pillar.
-
(3)
The pillar instability that can be triggered by weak disturbance belongs to sliding-type rockburst.
-
(4)
Considering the whole processes of triggering mine pillar instability are (1) the occurrences of shear-band under long-term static load; (2)stress state on shear-band reaches its critical state; (3) an appropriate disturbance is applied to the pillar; (4) mine pillar instability occurs. Therefore, the post-peak modulus is greater than or equal to the pre-peak modulus, which is the decisive mechanical property controlling the aforementioned instability processes.
-
(5)
The mine pillar instability can be triggered only if the post-peak modulus is greater than or equal to the pre-peak modulus, which may be the reason why the triggered mine pillar rockburst is not often observed.
-
(6)
More efforts are still required to further investigate the mechanism underlying triggered mine pillar instability, especially the stresses evolution on shear-band while the pillar is simultaneously subjected to static load and dynamic disturbance.
References
Atkinson BK (1992) Fracture mechanics of rock. Seismological Press, Beijing
Cai M (2010) Practical estimates of tensile strength and Hoek-Brown strength parameter mi of brittle rocks. Rock Mech Rock Eng 43:167–184
Cai M, Kaiser PK, Tasaka Y, Maejima T, Morioka H, Minami M (2004) Generalized crack initiation and crack damage stress thresholds of brittle rock masses near underground excavations. Int J Rock Mech Min Sci 41:833–847
Cook NGW (1965) A note on rockburst considered as a problem of stability. J S Afr Inst Min Metall 65:437–445
Cotterell B, Rice JR (1980) Slightly curved or kinked cracks. Int J Fract 16(2):155–169
Gomberg J, Reasenberg PA et al (2001) Earthquake triggering by seismic waves following the Landers and Hector Mine earthquake. Nature 411:462–466
Hill DP, Reasenberg PA et al (1993) Seismicity remotely triggered by the magnitude 7.3 landers, california, earthquake. Science 260:1617–1623
Hoek E, Martin CD (2014) Fracture initiation and propagation in intact rock-a review. J Rock Mech Geotech Eng 6:287–300
Horii H, Nemat-Nasser S (1985) Compression-induced microcrack growth in brittle solids: axial splitting and shear failure. J Geophys Res 90:3105–3125
Jiang YD, Pan YS, Jiang FX, Dou LM, Ju Y (2014) State of the art review on mechanism and prevention of coal bumps in china. J China Coal Soc 39(2):205–213
Johnson PA, Jia XP (2005) Nonlinear dynamics, granular media and dynamic earthquake triggering. Nature 437:871–874
Kachanov LM (1986) Introduction to the continuum damage mechanics. Springer, Dordrecht
Klein E, Reuschle T (2004) A pore crack model for the mechanical behaviour of porous granular rocks in the brittle deformation regime. Int J Rock Mech Min Sci 41:975–986
Landau LD, Lifshitz EM (2013) Fluid mechanics, Volume 6 of Course of Theoretical Physics, 5th edn. Higher Education Press, Beijing
Lastakowski H, Geminard JC, Vidal V (2015) Granular friction: triggering large events with small vibrations. Sci Rep 5:1–5
Li JT, Cao P (2006) Analysis of pillar stability in hard rock mass by longitudinal splitting based on catastrophe theory. J Cent South Univ (Sci Tech) 37(2):371–375
Li T, Cai MF, Cai M (2007a) A review of mining-induced seismicity in China. Int J Rock Mech Min Sci 44:1149–1171
Li XB, Li DY, Guo L, Ye ZY (2007b) Study on mechanical response of highly-stressed pillars in deep mining under dynamic disturbance. Chin J Rock Mech Eng 26(5):922–928
Linkov AV (1992) Dynamic phenomena in mines and the problem of stability. University of Minnesota, Minnesota
Lu HJ, Liang P, Gan DQ, Sun GP (2015) Stress evolution and surface subsidence laws of hard rock pillars under dynamic disturbance. Metal Mine 7:6–10
Qian QH (2014) Definition, mechanism, classification and quantitative forecast model for rockburst and pressure bump. Rock Soil Mech 35(1):1–6
Ryder JA (1988) Excess shear stress in the assessment of geologically hazardous situations. J S Afr Inst Min Metall 88:27–39
Salamon MDG (1993) Keynote address: Some applications of geomechanical modelling in rockburst and related research//Rockburst and seismicity in mines. A.A. Balkema, Rotterdam
Stacey TR (2013) Dynamic rock failure and its containment. In: Proceedings of the first international conference on rock dynamic and applications. CRC Press, Lausanne, p 57–70
Tan TK (1987) Rockburst, case records, theory and control. Chin J Rock Mech Eng 6(1):1–18
Tarasov B, Potvin Y (2013) Universal criteria for rock brittleness estimation under triaxial compression. Int J Rock Mech Min Sci 59:57–69
Wang LG, Miao XX (2006) Study of mechanism of destabilization of the mine pillar based on a cusp catastrophic model. J Min Saf Eng 23(2):137–140
Wang XB, Pan YS, Ren WJ (2003) Instability criterion of shear failure for rock specimen based on gradient-dependent plasticity. Chin J Rock Mech Eng 22(5):747–750
Wang SY, Lam KC, Au SK, Tang CA, Zhu WC, Yang TH (2006) Analytical and numerical study on the pillar rockburst mechanism. Rock Mech Rock Eng 39(5):445–467
Wang MY, Li J, Li KR (2015) A nonlinear mechanical energy theory in deep rock mass engineering and its application. Chin J Rock Mech Eng 34(4):659–667
Wang MY, Li J, Ma LJ, Huang HX (2016) Study on the characteristic energy factor of the deep rock mass under weak disturbance. Rock Mech Rock Eng 49(8):3165–3173
Xia KW, Rosakis AJ, Kanamori H (2004) Laboratory earthquake: the sub-Rayleigh-to-supershear rupture transition. Science 303:1859–1861
Yang YJ, Xing LY, Zhang YQ, Ma DP (2015) Analysis of long-term stability of gypsum pillars based on creep tests. Chn J Rock Mech Eng 34(10):2106–2113
Zhou XP, Shou YD, Qian QH, Yu MH (2014) Three-dimensional nonlinear strength criterion for rock-like materials based on the micromechanical method. Int J Rock Mech Min Sci 72:54–60
Acknowledgements
The authors would like to acknowledge the financial support from the National Natural Science Foundation of China (Grant nos. 51527810, 51679249), which is greatly appreciated by the authors.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Rights and permissions
About this article

Cite this article
Huang, H., Li, J. & Jiang, H. Theoretical derivation of basic mechanical property required for triggering mine-pillar rockburst. Acta Geophys. 65, 945–955 (2017). https://doi.org/10.1007/s11600-017-0081-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11600-017-0081-2