
Abstract
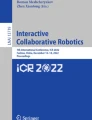
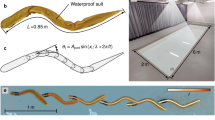
Fishes that use undulatory locomotion occasionally change their inherent kinematics in terms of some natural behavior. This special locomotion pattern was vividly dubbed “hybrid kinematics” by biologists recently. In this paper, we employed a physical model with body shape of a Mackerel (Scomber scombrus), to use the three most typical undulatory kinematics: anguillform, carangiform and thunniform, to investigate the hydrodynamic performance of the so-called “hybrid kinematics” biological issue. Theoretical models of both kinematics and hydrodynamics of the physical model swimming were developed. Base on this model, the instantaneous force produced by fish undulatory body and flapping tail were calculated separately. We also quantitatively measured the hydrodynamic variables of the robotic model swimming with the three undulatory kinematics on an experimental apparatus. The results of both theoretical model and experiment showed that the robot with thunniform kinematics not only reaches a higher speed but also is more efficient during steady swimming mode. However, anguilliform kinematics won the speed race during the initial acceleration. Additionally, the digital particle image velocimetry (DPIV) results showed some difference of the wake flow generated by the robotic swimmer among the three undulatory kinematics. Our findings may possibly shed light on the motion control of a biomimetic robotic fish and provide certain evidence of why the “hybrid kinematics” exists within the typical undulatory locomotion patterns.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
References
Sfakiotakis M, Lane D M, Davies J C. Review of fish swimming modes for aquatic locomotion. IEEE J Ocean Eng, 1999, 24: 237–252
Tytell E D. Do trout swim better than eels? Challenges for estimating performance based on the wake of self-propelled bodies. Exp Fluids, 2007, 43: 701–712
Tytell E D, Borazjani I, Sotiropoulos F, et al. Disentangling the functional roles of morphology and motion in the swimming of fish. J Exp Biol, 2010, 50: 1140–1156
Tytell E D, Lauder G V. The hydrodynamics of eel swimming. I. Wake structure. J Exp Biol, 2004, 207: 1825–1841
Lighthill M J. Large-amplitude elongated-body theory of fish locomotion. Proc R Soc Lond B, 1971, 179: 125–138
Chen Z, Shatara S, Tan X B. Modeling of biomimetic robotic fish propelled by an ionic polymer-metal composite caudal fin. IEEE/ASME Trans Mechatron, 2010, 15: 448–459
Wen L, Wang T M, Liang J H, et al. Novel method for modeling and control investigation of efficient-swimming carangiform robotic fish. IEEE Trans Ind Electron, 2012, 59: 3176–3188
Wen L, Wang T M, Wu G H, et al. Hydrodynamic investigation of a self-propulsive robotic fish based on a force-feedback control method. Bioinspir Biomim, 2012, 7: 036012
Yu J Z, Tan M, Wang S, et al. Development of a biomimetics robotic fish and its control algorithm. IEEE Trans Sys Man Cybern Part B-Cyber, 2004, 34: 1798–1810
Zhou H, Hu T J, Xie H B, et al. Computational and experimental study on dynamic behavior of underwater robots propelled by bionic undulating fins. Sci China Tech Sci, 2010, 53: 2966–2971
Zhou C, Chao Z Q, Wang S, et al. A marsupial robotic fish team: Design, motion and cooperation. Sci China Tech Sci, 2010, 53: 2896–2904
Wang G, Zhang D B, Lin L X, et al. CPGs control method using a new oscillator in robotic fish. Sci China Tech Sci, 2010, 53: 2914–2919
Arash T, Sakineh O. A novel miniature virus-inspired swimming robot for biomedical applications. Sci China Tech Sci, 2010, 53: 2883–2895
Wang T M, Wen L, Liang J H, et al. Fuzzy vorticity control of a biomimetic robotic fish using a flapping lunate tail. J Bionic Engi, 2010, 7: 56–65
Hultmark M. Flow field measurements in the wake of a robotic lamprey. Exp Fluids, 2007, 43: 683–690
Hess F, Videler J J. Fast continuous swimming of Saithe (Pollachius virens): A dynamic analysis of bending moments and muscle power. J Exp Biol, 1984, 109: 229–251
Barrett D S, Triantafyllou M S, Yue D K P. Drag reduction in fish-like locomotion. J Fluid Mech, 1999, 392: 183–212
Anderson J M, Chhabra N. Maneuvering and stability performance of a robotic tuna. Integr Comp Biol, 2002, 42: 118–126
Dewar H, Graham J. Studies of tropical tuna swimming performance in a large water tunnel. J Exp Biol, 1994, 192:45–59
Wen L, Wang T M, Liang J H, et al. A novel method based on a force-feedback technique for the hydrodynamic investigation of kinematics effects on robotic fish. In Proc IEEE Conf Robot Autom, 2011. 203–208
Wen L, Wu G H, Liang J H, et al. Hydrodynamic experimental investigation on efficient swimming of robotic fish using self-propelled method. Int J Offshore Polar Eng, 2010, 20: 167–174
Peterson S D, Porfiri M, Rovardi A. A particle image velocimetry study of vibrating ionic polymer metal composites in aqueous environments. IEEE/ASME Trans Mechatron, 2009, 14: 474–483
Blake R W, Domenici P. Biomechanics in Animal Behavior. Oxford: BIOS Scientific, 2000
Donley J M, Dickson K A Swimming kinematics of juvenile kawakawa tuna (Euthynnus affinis) and chub mackerel (Scomber japonicus). J Exp Biol, 2000, 203: 3103–3116
Fish F E, Lauder G V. Passive and active flow control by swimming fishes and mammals. Annu Rev Fluid Mech, 2006, 38: 193–224
Triantafyllou M S, Triantafyllou G S, Yue D K P. Hydrodynamics of fishlike swimming. Ann Rev Fluid Mech, 2000, 32: 33–53
Gray J, Hancock G J. The propulsion of sea-urchin spermatoza. J Exp Biol, 1955, 32: 802–814
Hoerner S F. Fluid-Dynamic Drag. Brick Town, NJ: Hoerner Fluid Dynamics, 1965
Schlichting H. Boundary-Layer Theory. New York: McGraw-Hill, 1979
Dickinson M H. Unsteady mechanisms of force generation in aquatic and aerial locomotion. Am Zool, 1996, 36: 537–554
Streitlien K, Tranitafyllou G S. On thrust estimates for flapping foils. J Fluids Structures, 1998, 12: 47–55
Milne-Thompson L M. Theoretical Aerodynamics. New York: Macmillan. 1966
Mori N, Chang K. Introduction to MPIV-PIV toolbox in MATLAB- version 0.965 [EB/OL]. 2004-12-21. http://sauron.urban.eng.osaka-cu.ac.jp/~mori/softwares/mpiv
Wu G H, Yang Y, Zeng L J. Kinematics, hydrodynamics and energetic advantages of burst-and-coast swimming of koi carps (Cyprinus carpio koi). J Exp Biol, 2007, 210: 2181–2191
Liang J H, Wang T M, Wen L. Development of a two-joint robotic fish for real-world exploration. J Field Robotics, 2011, 28: 70–79
Buchholz J H, Smits A J. The wake structure and thrust performance of a rigid low-aspect-ratio pitching panel. J Fluid Mech, 2008, 603: 331–365
Borazjani I. On the role of form and kinematics on the hydrodynamics of self-propelled fish. J Exp Biol, 2010, 213: 89–107
Cheng J Y. Note on the calculation of propeller efficiency using elongated body theory. J Exp Biol, 1994, 192: 169–177
Liao J C, Beal D N, Lauder G V, et al. Fish exploiting vortices decrease muscle activity. Science, 2003, 302: 1566–1569
Chou C L, Low K H. Design and locomotion control of a biomimetic underwater vehicle with fin propulsion. IEEE/ASME Trans Mechatron, 2012, 17: 25–35
Hu T J, Shen L C, Lin L X, et al. Biological inspirations, kinematics modeling, mechanism design and experiments on an undulating robotic fin inspired by Gymnarchus niloticus. Mech Machine Theory, 2009, 44: 633–645
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Wen, L., Wang, T., Wu, G. et al. Hybrid undulatory kinematics of a robotic Mackerel (Scomber scombrus): Theoretical modeling and experimental investigation. Sci. China Technol. Sci. 55, 2941–2952 (2012). https://doi.org/10.1007/s11431-012-4952-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11431-012-4952-0