
Abstract
Background, aim and scope
Tank-to-Wheels (TtW) makes the largest contribution to the total Well-to-Wheels (WtW) energy consumption and greenhouse gas (GHG) emissions from fossil-derived transportation fuels. The most commonly adopted TtW methodologies to obtain vehicle energy consumption, energy efficiency, and GHG emissions used to date all have significant limitations. A new TtW methodology, which combines micro-scale virtual vehicle simulation with macro-scale fleet modeling, is proposed in this paper. The models capabilities are demonstrated using a case study based on data from the passenger car sector in Great Britain.
Methods
A simplified internal combustion engine model was developed in-house to simulate engine behaviors across a wide range of engine capacities and technologies. Vehicle simulation was then carried out using the efficiency map output by the simplified engine model for any given gasoline or diesel engine; the simulation was validated for 37 vehicles available on the UK market in terms of their vehicle-certification fuel consumption, with a discrepancy generally within 3%. Real-world fleet and driving data from the Great Britain’s car fleet was extracted from the Transport Statistics Great Britain (TSGB) database between 2001 and 2007TSGB 2001–2007. A virtual fleet was constructed with the validated virtual vehicles to represent the real-world passenger car fleet in terms of its composition and operating characteristics. This fleet model was shown to match the real-world fleet-averaged fuel consumption within 3% for the gasoline fleet and within 6% for the diesel fleet. Finally, several scenarios were analyzed using the validated fleet model, covering a projection for 2008, driving pattern, lubrication, and fuel. The vehicle-to-vehicle variation was found to be significant in some scenarios, indicating that a fleet-based methodology would be more rigorous and flexible.
Discussion
Energy consumption and CO2 emission figures from previous, well-recognized Europe-oriented studies (e.g., the 2008 JRC/EUCAR/CONCAWE study) were significantly lower than the TSGB real-world results based on the new TtW methodology. It is apparent that using a single vehicle to represent the whole fleet could be misleading; in particular, the relative energy efficiency and CO2 emission of diesel over gasoline cars might follow a different trend with time for the real-world fleet from that shown in previous studies.
Conclusions
Future WtW studies can benefit from the modeling toolset and methodology reported herein in a number of ways:
-
TtW analysis can be carried out
-
thoroughly—on a fleet basis
-
independently—involving less proprietary information
-
impartially—not concentrating on a specific vehicle model
-
and flexibly—allowing detailed analysis of physics, chemistry, and vehicle component performance.
-
When comparing different WtW energy pathways, e.g., gasoline vs. diesel passenger cars or natural gas vs. bio-diesel fuelled busses, the absolute aggregate fleet impact can be investigated—conclusions based on a single vehicle may overlook vehicle-to-vehicle variations and potentially mislead policy making.
-
Using the virtual fleet database as a platform, a large number of scenarios can be analyzed and detailed impact of fuels properties, vehicle technologies and driving patterns on WtW results investigated. The models will evolve in time together with the researchers’ knowledge base and data base.
Recommendations and perspectives
The virtual engine/vehicle/fleet model developed in this work can readily be expanded and upgraded in the future, in terms of model details, coverage, and data quality. The methodology itself is generically applicable to any defined fleet (passenger cars, commercial vehicles, etc.) with any operating characteristics at any given timeframe from any geographic region. Various subjects and their implications for fleet energy consumption and GHG emissions could be studied including, but not restricted to, the following:
-
Fuels—injector/valve cleanliness, anti-knock properties, dieselization, bio-components, gaseous fuels etc.
-
Engine/vehicle technology—friction and weight reduction, advanced combustion, hybridization etc.
-
Driving pattern—vehicle loading, gear-shifting schedule, tire maintenance, cold start, etc.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Background, aim, and scope
1.1 Advantages and disadvantages of existing TtW methodologies
Tank-to-Wheels (TtW) is known to make the largest contribution to the total Well-to-Wheels (WtW) energy consumption and greenhouse gas (GHG) emissions with fossil-derived transportation fuels (Argonne National 2009; JRC/EUCAR/CONCAWE 2008; Delucchi 2003). TtW GHG emissions typically account for 70–85% of the total WtW emissions (Argonne National 2009; JRC/EUCAR/CONCAWE 2008; Delucchi 2003; BERR 2008); as a result, 1% reduction in TtW GHG emissions would be equivalent in overall benefit to 2–6% reduction in Well-to-Tank (WtT) GHG emissions. Therefore, adopting a rigorous, thorough and flexible methodology for TtW analysis is pivotalFootnote 1 when conducting WtW studies. The most commonly adopted TtW methodologies to obtain vehicle energy consumption, energy efficiency, and GHG emissions to date have been either
-
a single average figure for a specific fuel/vehicle combination, e.g., Delucchi’s Lifecycle Emissions Model (Delucchi 2003) and the 2008 Department for Business Enterprise and Regulatory Reform electric vehicle study (BERR 2008) or
-
vehicle simulation using virtual vehicle(s), e.g., the 2008 JRC/EUCAR/CONCAWE (JEC) study (JRC/EUCAR/CONCAWE 2008) and Argonne National Laboratory’s GREET Model (The Greenhouse Gases, Regulated Emissions, and Energy Use in Transportation Model, GREET 2009).
These methodologies have their own advantages and limitations as summarized in Table 1.
Ideally, a TtW study should look at the average energy consumption, energy efficiency, and GHG emissions from a “living” vehicle fleet in a chosen study area and a given timeframe, which defines the demographics of the fleet population (e.g., size distribution, aging dynamics, technology mix, emissions targets, etc.) and operating characteristics (driving patterns and behavior, e.g., miles traveled, city/rural/highway, economical/wasteful, etc.). However, it would not be practical to establish and maintain a large vehicle fleet for the needs of TtW analysis, especially for vehicle technologies that are not available in the mass market. Combining micro-scale virtual vehicle simulation with macro-scale fleet modeling can offer a comprehensive and cost-effective toolset for such TtW studies.
1.2 A new model for computing TtW emissions
A new TtW methodology is proposed in this paper for analyzing TtW energy consumption, energy efficiency and GHG emissions, and a case study is presented based on the passenger car sector in Great Britain.
To simulate vehicle behaviors across a wide range of engine capacities and technologies, a simplified internal combustion engine model has been built based on empirical correlations of combustion characteristics, gas dynamics, friction, etc. Its output, together with the vehicle simulation model, has been validated for a wide range of vehicles available in the UK market, in terms of their vehicle-certification fuel consumption.
Finally, real-world fleet and driving data from Great Britain’s car fleet (extracted from the Transport Statistics Great Britain database) is used for the construction of a virtual fleet with the validated virtual vehicles. This virtual fleet:
-
closely represents the real-world fleet in terms of its composition and operating characteristics
-
can be used to make projections of the future fleet’s performance and
-
will evolve as the real-world database is updated.
After performing a literature review in the areas of WtW energy use and GHG emissions, engine and vehicle simulation, and vehicle fleet modeling, the authors believe that the proposed new methodology is unique in that it combines detailed, vehicle component-level analysis with segment-level vehicle parc modeling—by gathering and mathematically connecting a comprehensive set of data, the new approach derives critical system unknowns such as vehicle segment-specific growth and scrappage rates, driving pattern etc., as opposed to imposing certain assumptions or empirical understanding on an incomplete dataset in many previous studies (e.g., Delucchi 2003; Bandivadekar et al. 2008).
2 Methods
2.1 Engine modeling
A simplified internal combustion engine model was constructed using empirical correlations regarding combustion characteristics, gas dynamics, friction, etc. derived from in-house bench engine test results and validated against vehicle certification database (see Section 3.1 below). This model generates the brake thermal efficiency map (a 2D look-up table indexed by engine torque and speed) of a gasoline or diesel engine of any capacity with a design equivalent to Euro IV technology.
2.1.1 Model structure
The structure of the simplified engine model is described in steps below:
-
1.
Assign the ideal indicated thermal efficiency to the engine to be modeled according to its compression ratio;
-
2.
Apply an empirical correlation to correct for piston speed—the lower the mean piston speed, the more losses imposed on the ideal thermal efficiency from step 1;
-
3.
Apply an empirical correlation to correct for combustion phasing—moving away from the optimum combustion phasingFootnote 2 would impose further losses on the thermal efficiency from step 2;
-
4.
Apply an empirical correlation to correct for air/fuel mixture strength—adjust the thermal efficiency from step 3 according to the air/fuel mixture strength, e.g., 8% losses with a mixture 10% richer than stoichiometric and 4% efficiency gain with a mixture 10% leaner than stoichiometric;
-
5.
Apply an empirical correlation to correct for pumping work—adjust the thermal efficiency from step 4 according to parameters such as the engine’s number of inlet valves, volumetric efficiency, rotational speed, and method of aspiration;
-
6.
Apply an empirical correlation to correct for engine friction—adjust the thermal efficiency from step 5 according to the engine’s load and rotational speed; the correlation could also be modified to suit different engine lubricants;
-
7.
Apply an empirical correlation to correct for cold conditions—adjust the thermal efficiency from step 6 according to the engine oil temperature.Footnote 3
An example of the engine model’s output, i.e., the engine’s brake specific fuel consumption (BSFC) map, is shown in Fig. 1.

Example engine BSFC map output by the simplified model—1.0 L PFI gasoline engine
Note: this paper intends to present an integrated TtW methodology rather than promoting individual tools; one could use any type of engine model or experimentally measured engine data as part of the TtW analysis. Similarly, the vehicle model described in Section 2.2 below could be replaced by any other type of tool or experimental data.
2.1.2 Model error and limitation
Most of the empirical correlations used in the simplified engine model were derived from test results in a bench engine under 10 full load and 20 part load conditions. Therefore, applying the simplified model even to the same bench engine for the whole operating regime would introduce some uncertainty, at best similar to the precision offered by the bench engine measurement. Using the simplified model to generate data for other engines of a similar design with different engine capacities would bear larger error.
Furthermore, because the engine model was based on a naturally aspirated port fuel injected (PFI) engine, attempting to expand the simplified model to capture advanced technological features such as turbocharging, advanced diesel fuel injection and direct injection spark ignition (DISI, especially lean burn) would inevitably introduce even larger error.
Finally, the bench engine measurement, on which the engine model was based, may have had large measurement uncertainties at near-idle and/or full load conditions.
Despite all these possible sources of error, it will be shown later in this paper that, together with the uncertainty introduced by the vehicle model, this simplified engine model is sufficiently accurate for TtW analysis.
2.2 Vehicle modeling
2.2.1 ADVISOR
The open source vehicle simulation package Advanced Vehicle Simulator (ADVISOR)Footnote 4 was used for this work. It tests the effect of parameter changes in vehicle components, fuels and other modifications on fuel economy, performance and/or emissions. The user defines (1) a vehicle, using overall vehicle data and (2) a drive cycle (speed vs. time and road gradient) and ADVISOR calculates vehicle performance, fuel economy, and tail pipe emissions (Wipke et al. 1999; Markel et al. 2002).
The key input data for simulation of a conventional vehicle with a manual transmission in ADVISOR include:
-
Vehicle kerb weight (kg)—for vehicle-certification type of simulation this is set according to the relevant test procedure, e.g., for the New European Drive Cycle (NEDC), a vehicle with a kerb weight in the range of 1,305–1,420 kg would have an equivalent inertia of 1,360 kg in its vehicle-certification test
-
Vehicle coefficient of drag
-
Vehicle frontal area (m2)
-
Engine speed map (RPM)
-
Engine torque map (N m)
-
Maximum engine torque indexed by the engine speed map (N m)
-
Hot and cold engine BSFC map (g/kWh), from an engine model, e.g., the simplified model described in Section 2.1 or experimentally mapping the engine on a test bench
-
Fuel density (g/L) and lower heating value (LHV, J/g)
-
All gear ratios and final drive ratio of the manual transmission
-
Wheel rolling radius (m)
-
First-order rolling resistance coefficient, set to 0.008 as default for vehicle-certification type of simulation—this value can be adjusted when simulating real-world driving and higher-order coefficients can be provided as well
-
Vehicle accessory load, scaled for vehicle-certification type of simulation according to the vehicle’s maximum power and kerb weight to account for accessory load associated with the alternator and power-assisted steering etc.Footnote 5—this value can be adjusted when simulating real-world driving
A powertrain control strategy is required primarily to determine the gear-shift events for vehicle-certification type of simulation, and a vehicle speed dependent strategy is used as the default—for example, the vehicle speeds for gear changing with a manual car can be found in the NEDC test procedure (EU Directive 70/220/EEC 2007). This control strategy can be adjusted when simulating real-world driving.
A vehicle speed vs. time profile is then required for ADVISOR to simulate the vehicle’s fuel consumption over the prescribed test cycle. If an acceleration test is to be conducted, gear shift delay and vehicle speed gates need to be specified.
ADVISOR requires both a hot and cold BSFC map to simulate the vehicle’s cold start performance. It then determines the cold fuel use as below
Where T is the engine temperature calculated by ADVISOR at a given point in time during the drive cycle, and T hot and T cold are the temperatures at which the hot and cold BSFC maps were obtained.
The main output of the model is volumetric fuel consumption (L/100 km); this together with the fuel properties will give the vehicle’s TtW CO2 emission (assuming negligible CO, unburned hydrocarbons and soot in the exhaustFootnote 6). When an acceleration test has been run, the acceleration times between the specified speed gates will also be output.
2.2.2 Model error and limitation
Potential sources of uncertainty of the simplified engine model have been described in Section 2.1.2. Even if engine efficiency maps obtained via bench engine tests are used, they may have had large measurement uncertainties at near-idle and/or full load conditions, may not be sufficient to model braking or coasting accurately and may not have fully accounted for transient and/or warm-up effects.
As described in Section 2.2.1, ADVISOR applies a linear algorithm to correct for cold start effects, while the oil temperature effect alone would not be linear (Schwaderlapp et al. 2000). It was considered beyond the scope of this paper to characterize the potential error in simulating cold start.
While simulating a conventional vehicle with a manual transmission would be relatively straightforward in ADVISOR, accurately simulating the characteristics of an automatic transmission could be very difficult without understanding the details pertinent to the individual hardware (the operating characteristics of the torque coupling, transmission losses and warm-up characteristics etc.) and software (control strategies, e.g., upshift and downshift vs. engine transient operation, gear lock-up etc.). It was therefore considered beyond the scope of this paper to model vehicles with an automatic transmission; instead, a fuel consumption/CO2 multiplier was derived based on samples from the Vehicle Certification Agency’s (VCA) database http://www.vcacarfueldata.org.uk/ when vehicles with an automatic transmission were to be used as part of the virtual fleet.
It should also be noted that the simplified engine model developed in this work was based on empirical correlations applicable to engine designs equivalent to Euro IV technology. The definition of ‘Euro IV technology’ itself is somewhat ambiguous; indeed, a vehicle with an engine equivalent to Euro III technology could still meet Euro IV emissions legislation using a combination of measures, such as a different engine calibration, more advanced after treatment, more advanced vehicle components (transmission, tires, body, etc.), and control software. It was considered beyond the scope of this work to model vehicles from older generations; instead, a fuel consumption/CO2 multiplier was derived for each of the technology segment older than Euro IV, namely pre-Euro II, Euro II and Euro III, based on samples from the VCA database (http://www.vcacarfueldata.org.uk/) when vehicles with older technologies were to be used as part of the virtual fleet.
2.3 Fleet modeling
The following historic data are required as inputs to the fleet model (broken down into fuels segments, vehicle technology segments, engine capacity segments, and CO2/tax band segments if available):
-
Demographics of the regional fleet population
-
Vehicle miles traveled and fuel consumption
-
Driving pattern of the regional driver population
When a detailed breakdown of the database is not available, ensemble-averaged data can be used at the expense of fewer degrees of freedom and potentially larger error.
A virtual fleet will then be established using the virtual vehicles modeled as described in Section 2.1 and 2.2. By retrospectively fitting the historic data with the virtual fleet, the following can be obtained:
-
A virtual fleet population that evolves according to the real world fleet demographics and represents the real world fleet in terms of energy consumption (e.g., MJfuel/km), energy efficiency (e.g., MJdriving/MJfuel) and GHG emissions (e.g., g CO2 eq/km)
-
Advances of automotive technologies to date
-
Changes in the fleet’s operating characteristics to date
Eventually, the virtual fleet can be used to simulate the energy consumption, energy efficiency and GHG emissions of a given future fleet based on a particular scenario (e.g., alternative fuels, advanced engine technologies, advanced vehicle technologies, specific driving behavior, etc.). Two approaches can be taken for the fleet simulation:
-
Forward looking—projections of alternative fuels, vehicle fleet population, advances of automotive technologies and driving behavior are used as boundary conditions to determine their impact, in terms of energy consumption, energy efficiency and GHG emissions
-
Backward looking—regional mandates of energy consumption, energy efficiency and/or GHG emissions are used as boundary conditions to determine what must be achieved in the future, in terms of alternative fuels, vehicle fleet population, advances of automotive technologies, and/or driving behavior
The virtual fleet and associated database can readily be expanded and upgraded. If the region of interest is sufficiently well defined (e.g., a megacity), regulated or even unregulated local emissions can also be considered in the model.
Model calibration can be carried out on all levels using historic data. For example, the engine/vehicle models can be calibrated with experimental data and public domain information regarding technologies for each segment, and the fleet model can be calibrated with survey data from government agencies (such as the UK’s Department for Transport and VCA) and/or independent consultancies.
Model validation can be carried out on all levels when new data become available in the future. As more and more advanced vehicle technologies such as the premixed compression ignition engine, hybrid/electric cars, aggressive weight and friction reduction, etc. are becoming commercially available, more and more experimental data will be generated both in the public domain and in-house. Additionally, vehicle telematics is expected to grow significantly in the foreseeable future (Automotive Engineering International Online 2008), which will help establish an upgradable database of real-world vehicle operating characteristics globally.
2.4 Summarizing remarks
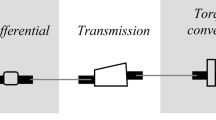
Figure 2 summarizes major possible TtW methodologies, with the one proposed in this paper highlighted with thick solid lines; in comparison, the methodology adopted by the 2008 JEC study is marked with thin solid lines. For each row in Fig. 2 from left to right, the levels of complexity and practical difficulties tend to increase. Researchers should choose the methodology that best suits their study needs and are likely to get different results with different methodologies; however, the authors believe the methodology proposed in this paper represents an optimum compromise between rigor, practicality and flexibility, particularly when the absolute aggregate fleet impact is of interest.

Schematic of TtW methodology
3 Case study
This section presents results from a case study based on the passenger car sector in Great Britain.
3.1 Vehicle simulation results
The engine/vehicle model described in Section 2.1 and 2.2 was validated against 37 vehicles available on the UK market, which range from super-mini cars to premium saloons and sports utility vehicles, covering a variety of engine/vehicle technologies (gasoline/diesel, 5-, and 6-speed manual transmission with short and long gear ratios, four-wheel/all-wheel drive, PFI/DISI/lean-burn DISI, naturally aspirated and turbocharged, hybrid electric etc.). The majority of the vehicle specification data are available on the website Carfolio.com, with the rest obtained via auto-manufacturers’ catalogs, online search engines, or derived from similar vehicles.
The ADVISOR results matched the measured data reasonably well, as shown in Fig. 3. The discrepancy in the NEDC combined cycle fuel consumption was within 3%. The discrepancy in NEDC CO2 emission was generally within 3% as well, with a few exceptions up to 5%. Although ADVISOR is not an ideal tool for simulating highly transient events like 0–100 km/h acceleration, the error was generally within 1 s for gasoline vehicles, suggesting that the full power performance simulated by the simplified engine model was sufficiently accurate. No simulation of 0–100 km/h acceleration was performed for diesel vehicles due to lack of full load data.

Comparison between measured data and ADVISOR results—NEDC combined fuel consumption (top) and NEDC CO2 (bottom)
It should be noted that without emissions maps (CO, HC, and soot), ADVISOR could only calculate CO2 emission by assuming that all of the carbon in the fuel was released in the form of CO2, while the vehicle-certification figures for tax banding were probably measured using emissions analyzers with unknown precision. Furthermore, properties of a single fuel were used in the simulation (Table 2), while the VCA database http://www.vcacarfueldata.org.uk/ would almost certainly have been established using fuels from many different batches.
3.2 Real-world fleet data
Real-world fleet and driving data from Great Britain’s passenger car fleet (i.e., private and taxi etc.) were extracted from the Transport Statistics Great Britain (TSGB) database between 2001 and 2007 (TSGB 2001–2007). The key parameters are listed below:
-
Annual total gasoline and diesel consumption by the passenger car segment, respectively
-
Average car occupancy
-
Average traffic speeds
-
Annual total vehicle mileage by the passenger car segment
-
The composition of the gasoline/diesel passenger car fleet by CO2 emission band for each of the four technology segment (pre-Euro II, Euro II, Euro III, and Euro IV)
-
The composition of the gasoline/diesel passenger car fleet by engine capacity for each of the four technology segment (pre-Euro II, Euro II, Euro III, and Euro IV)
-
The average CO2 emission of the entire passenger car fleet
-
The average engine capacity of the entire passenger car fleet
3.3 Virtual-fleet results
3.3.1 Fleet model validation
To model the passenger car fleet in Great Britain based on data gathered as described in Section 3.2, the following assumptions were made:
-
Contributions from vehicles other than conventional gasoline and diesel cars were ignored,Footnote 7 with their market share split between the gasoline and diesel segments
-
Every passenger car traveled the same mileage annually
-
All cars registered for the first time before 1996 were pre-Euro II cars
-
All cars registered for the first time between 1996 and 1999 were Euro II cars
-
All cars registered for the first time between 2000 and 2004 were Euro III cars
-
All cars registered for the first time between 2005 and 2007 were Euro IV cars
-
The fuel consumption penalty of a vehicle with an automatic transmission compared to that with a manual transmission (otherwise the same design) would decrease over time because of advances in vehicle technology
-
The ratio between the engine capacity of a vehicle with an automatic transmission and that of a vehicle with a manual transmission would decrease over time because of advances in vehicle technology and propagation of automatic transmission technology into smaller engine capacity segments
A virtual fleet was constructed with the validated virtual vehicles to represent the real-world fleet. Given the 36 validated vehiclesFootnote 8 and the various multipliers (see overleaf for values used in this work), a total of 288 virtual vehicles were available, that is, (36 manual + 36 automatic) × 4 technology segments = 288.
To fit the historic data with the virtual fleet, the following set of linear algebraic equations need to be solved simultaneously for each year:
Where:\( \mathop {\left. X \right|}\nolimits_{1\,\, \times \,\,288}^{\rm{Year}} \) is the virtual vehicle composition vector, i.e., the unknowns of the equations\( \mathop {\left. F \right|}\nolimits_{1\,\, \times \,\,\,114}^{\rm{Year}} \) is the fleet data vector (114 = 4 technology segments × 6 CO2 segments × 2 fuels + 4 technology segments × 8 engine capacity segments × 2 fuels + 1 fleet average CO2 + 1 fleet average engine capacity)\( \mathop {\left. M \right|}\nolimits_{288\,\, \times \,\,114} \) is a matrix representing the characteristics of the virtual fleet—for example, its entry \( \mathop {\left. M \right|}\nolimits_{8,12} \) is 1 (true) because it refers to the eighth virtual vehicle (the Euro IV version of the gasoline Fiat Panda, engine capacity 1.242, VCA NEDC CO2 emission 156 g/km) and the twelfth entry of \( \mathop {\left. F \right|}\nolimits_{1\,\, \times \,\,114}^{\rm{Year}} \) (CO2 emission band 151–165 g/km for gasoline cars), while its entry \( \mathop {\left. M \right|}\nolimits_{8,49} \) is 0 (false) because for the same virtual vehicle the 49th entry of \( \mathop {\left. F \right|}\nolimits_{1\,\, \times \,\,114}^{\rm{Year}} \) calls for a pre-Euro II car with an engine capacity between 0 and 1 L.
Equation 2 is essentially the key to the fleet model. To further illustrate its structure and how it would be solved, a simplified example is explained below, where a virtual fleet (X) of only three Euro IV gasoline vehicles are considered and the real-world fleet data vector (F) consist of only six entries. The engine capacity and VCA CO2 emission of these three virtual vehicles are 1.242 L, 139 g/km; 1.798 L, 184 g/km; and 2.495 L, 238 g/km, respectively. The six entries in F are, from left to right, % < 165 g/km, % > 165 g/km, % < 1.8 L, % > 1.8 L, fleet-averaged engine capacity and fleet-averaged VCA CO2, respectively. Equation 2 would then become:
All the CO2 columns in F, in this case the first two columns, should add up to 1, and so should all the engine capacity columns. When an exact solution does not exist, the least squares method can be used.
Note: If more detailed real-world fleet data were to become available, e.g., more CO2 and engine capacity segments, the resulting virtual fleet would consist of more virtual vehicles and consequently be more representative of the real-world fleet.
The various multipliers used in the fleet model were derived based on samples from the VCA database (http://www.vcacarfueldata.org.uk/)—they were further optimized to account for the driving factor (see Fig. 4 and discussion below)—and are summarized in Table 3.

Comparison between real-world fleet and virtual fleet—fleet-averaged fuel consumption of gasoline vehicles (top) and diesel vehicles (bottom)
The next step was to use the virtual fleet composition to calculate its fleet-averaged fuel consumption. Figure 4 compares the fleet-averaged fuel consumption between the virtual fleet and the real-world fleet (TSGB). For example, the weighted-average gasoline consumption of the 2002 virtual fleet was 8.07 L/100 km using the VCA figures (labeled ‘VCA weighted’), very close to the TSGB value of 8.06 L/100 km. Similarly, the weighted-average diesel consumption of the 2002 virtual fleet was 6.75 L/100 km using the VCA figures, very close to the TSGB value of 6.78 L/100 km. However, the difference between the TSGB and the VCA-weighted virtual fleet results, i.e., the driving factor not accounted for by NEDC type testing, was still noticeable and appeared to vary in time.
Also shown for comparison in Fig. 4 is the sales-averaged fuel consumption (NEDC based) of newly registered cars for each year, provided by the TSGB database. Note that the fuel economy of new diesel cars has improved less than that of new gasoline cars in recent years.
The TSGB database also gave the average car occupancy and the average traffic speeds (England only), which could readily be implemented with the virtual fleet. The average car occupancy did not appear to change much over time, so the mean value, 1.58, between 2002 and 2006 was used, which would be equivalent to loading the virtual vehicles by an additional 45 kg weight, assuming that the average weight of a passenger is 75 kg.
The average speed of the NEDC test cycle is 20.65 mph, while the average peak and off-peak time traffic speeds in England between 1999 and 2006 were 21.45 and 25.35 mph, respectively (the year-by-year variation was small, varying between 20.9 and 22.1 mph for peak time traffic and between 24.1 and 26.3 mph for off-peak time traffic). Therefore the real-world average traffic speedFootnote 9 would be higher than that of the NEDC cycle. Increasing the percentage of high-speed driving (e.g., motorway driving) in the drive cycle was expected to improve the overall fuel economy. A new drive cycle was investigated using ADVISOR, which consisted of 6 ECE (low-speed sub-cycle) + 2 EUDC (high-speed sub-cycle), as opposed to 4 ECE + 1 EUDC in the standard NEDC cycle—the new cycle not only had a higher average speed of 22.49 mph, but also featured slightly less cold start and idling. Although the selection of this new cycle was somewhat arbitrary, the intention was to demonstrate the flexibility of the proposed methodology and toolset.
Using the ADVISOR results (labeled ‘ADVISOR’ in Fig. 4, with 45 kg added to the actual kerb weight of each virtual vehicle and the new drive cycle) instead of the VCA figures, the average gasoline consumption of the virtual fleet matched the TSGB data very well, within 3%, while the average diesel consumption of the virtual fleet matched the real-world values reasonably well, within 6%.
Possible explanations for the year-to-year variation in the match and the larger error with the virtual diesel fleet could include:
-
The volumetric calorific value of the fuel (MJ/L = density × LHV) would have some influence on the volumetric fuel consumption and might vary from year-to-year (properties of a single fuel were used in the model).
-
The aging of the fleet and consequently the deterioration of fuel economy; however, regular maintenance and services would tend to minimize such deterioration.
-
The annual mileage per diesel car might be different from that per gasoline car, with the difference varying from year-to-year; the ratio of the two for a given year might be affected by factors such as the ratio between diesel and gasoline fuel prices in that year, or the percentage of company cars/taxis which tend to be diesel cars and travel long distance.
-
The fleet-averaged operating characteristics of diesel cars might be different from those of gasoline cars, with the difference varying from year-to-year. For example, the NEDC cycle might be more representative of real-world gasoline car operation than diesel car operation, or diesel car drivers might tend to shift gears at lower vehicle speeds etc.
If data were available to resolve some or all of the above issues, the accuracy of the fleet model could be further improved. For instance, assuming linear decrease in the ratio between the annual mileage per diesel car and that per gasoline car, from 1.03 to 0.96, causes both the average gasoline and diesel consumption of the virtual fleet to match the real-world results to within 3%.
One interesting observation from Fig. 4 is that, even without the additional 45 kg vehicle loading and the modified drive cycle, the average fuel consumption of the virtual fleet based on the VCA data matched the TSGB data reasonably well, within 3% and 10% for the gasoline and diesel fleet, respectively, suggesting that the VCA (i.e., NEDC) results are reasonably representative of real-world driving.
3.3.2 Projection
Figure 4 also shows some projection results (labeled “Projection”) obtained by using the virtual fleet and extrapolating its composition prior to the year to be projected. The error of the projection for 2006 and 2007, compared to the “ADVISOR” results, was well within 1%.
3.3.3 Scenario analysis
To further demonstrate the potential of the new TtW methodology and the toolset established so far, several scenarios, regarding driving pattern, lubrication and fuel, were analyzed using the virtual fleet described in Section 3.3.1. Detailed analysis and results can be found in the Electronic Supplementary Material.
The proposed methodology and toolset allow the researchers to carry out such scenario analyses flexibly and cost effectively, revealing not only the sensitivity of the aggregate fleet results to various efficiency improvement measures but also the vehicle-to-vehicle variation which would have been overlooked by single vehicle-based methodologies.
The vehicle-to-vehicle variation was found to be significant in some scenarios, indicating that a fleet-based methodology would be more rigorous and flexible. For example, the fuel economy benefit from using an optimized gear-shifting schedule can be twice as much for some cars as that for others.
4 Discussion
So far, it has been demonstrated that a virtual fleet can be established with individually validated virtual vehicles based on reasonably accurate engine/vehicle simulation.
At this point, it is worth comparing results from the new TtW methodology with those from previous studies. Figure 5 compare results from the TSGB real-world fleet (labeled “TSGB” in Fig. 4) and the 2008 JEC study (one gasoline car and one diesel car chosen to represent typical European passenger cars), with all figures normalized to the JEC 2002 TtW gasoline results (2.235 MJ/km and 166.2 g CO2/km, respectively). It should be noted that the scope of the JEC study did not cover the whole European fleet, nor did it make assumptions about the availability or market share of the vehicle technology options.

Comparison between TtW results from the TSGB real-world fleet and the JEC study—normalized fuel consumption (top) and normalized CO2 emission (bottom). Note: (1) The 2008 JEC study looked at two timeframes, 2002 and 2010. The 2007 results presented here were derived from linear interpolation between 2002 and 2010 results; for the 2007 and 2010 diesel results, the average between the with- and without-DPF results was used. (2) TSGB 2010 results were derived from polynomial extrapolation from 2001 to 2007 results
It can be seen that:
-
the JEC figures are significantly lower than the TSGB real-world results, mainly because
-
the actual TSGB fleet consists of not only vehicles similar to the ones chosen by the JEC but also vehicles of different sizes and technology generations and
-
the real-world fleet results were from day-to-day driving as opposed to the laboratory-only results used in the JEC study;
-
the ratio between the TSGB real-world results and the JEC figures has increased from ~1.15 in 2002 to ~1.20 in 2010 for gasoline, while it has decreased from ~1.33 in 2002 to ~1.15 in 2010 for diesel; in other words, the change in fuel economy between 2002 and 2010 assumed in the JEC study is unlikely to be realized in practice from the fleet perspective.
-
the ratio of diesel over gasoline has decreased from ~0.94 in 2002 to ~0.82 in 2010 for the TSGB real-world fleet, while it has increased from ~0.81 in 2002 to ~0.86 for the JEC virtual vehicles. In other words, the JEC study overestimated the fuel consumption benefit of diesel over gasoline in 2002 vehicles but there is better agreement for 2010 vehicles.
It is apparent that using a single virtual vehicle to represent the whole fleet could be misleading when the absolute aggregate fleet impact is of interest; in particular, the relative energy efficiency and CO2 emissions of diesel over gasoline cars appears to follow a different trend with time for the real-world fleet from that assumed in the JEC study.
Note: it is beyond the scope of this work to include contributions from other GHGs, so the TtW CO2 figures quoted in this paper were in g CO2/km, not g CO2 eq/km.
5 Conclusions
The following conclusions can be drawn from this work:
-
A new methodology, which combines micro-scale virtual vehicle simulation with macro-scale fleet modeling, can provide realistic TtW energy consumption, energy efficiency, and GHG emissions for vehicle fleets.
-
This new methodology accurately predicts the TtW fleet average fuel consumtion, and hence the CO2 emissions of the passenger car sector in Great Britain.
-
The validated fleet model can be used to assess vehicle use and performance scenarios: its applicability has been demonstrated for scenarios involving changes in driving pattern, lubrication, and fuel performance.
-
Vehicle-to-vehicle variation is significant in some scenarios, indicating that a fleet-based methodology can be more rigorous and flexible than the traditional approach of single vehicle-based TtW analysis.
-
Energy consumption and CO2 emissions from the 2008 JEC WtW study are significantly lower than the TSGB real-world results. Using a single virtual vehicle to represent the whole fleet (as in the JEC study) can be misleading; for example, the relative energy efficiency and CO2 emission of diesel over gasoline cars follows a different trend for the real-world fleet from that in the JEC study.
6 Recommendations and perspectives
The virtual engine/vehicle/fleet model developed in this work can readily be expanded and upgraded in the future, in terms of model details, coverage and data quality. The methodology itself is generically applicable to any defined fleet (passenger cars, commercial vehicles, etc.) with any operating characteristics at any given timeframe from any geographic region. The implications of various scenarios for fleet energy consumption and GHG emissions could be studied including, but not restricted to, the following:
-
Fuels—injector/valve cleanliness, anti-knock properties, dieselization, bio-components, gaseous fuels, etc.
-
Engine/vehicle technology—friction and weight reduction, advanced combustion, hybridization, etc.
-
Driving pattern—vehicle loading, gear shifting schedule, tire maintenance, cold start, etc.
This paper covers the proof of concept for this approach. It could be further extended and the following steps are suggested for further development of the approach:
-
Establish a similar engine/vehicle/fleet modeling toolset based on the commercial vehicle sector
-
Model a more diverse virtual fleet including gaseous fuel-powered and electrified drive trains
-
Expand the engine/vehicle/fleet model for more accurate GHG emissions accounting, particularly N2O and CH4
-
Apply the new TtW methodology to other geographic areas. The passenger car sectors of USA and China are particularly suited because the majority of cars in these markets are still PFI gasoline vehicles
-
Better understand the propagation of error under this methodology and incorporate stochastic methods such as Monte Carlo simulation
Notes
Primarily in two areas: (1) when comparing different energy pathways, e.g., gasoline vs. diesel passenger cars or natural gas vs. bio-diesel fuelled busses and (2) when studying different vehicle fleets, the compositions of which are significantly different.
Combustion phasing is typically denoted as CA50, the crank angle position during the engine cycle when 50% of the fuel energy is released. The optimum CA50 for a gasoline engine is around 7 degrees after top dead center (TDC), which corresponds to an optimum spark timing for a given engine operating condition, commonly known as the minimum spark advance for best torque (MBT).
There are many other factors that would account for the performance difference between a cold and a hot engine, such as heat transfer, transmission losses, the control strategies of the engine management system (EMS) to light off the exhaust catalyst etc. Modeling these effects would require a much more thorough and detailed approach than the one adopted thus far, which is beyond the scope of this work.
Advanced Vehicle Simulator (ADVISOR), originally developed by the National Renewable Energy Laboratory (NREL), is a vehicle simulation software tool. Versions of ADVISOR until 2002 were based on open-source MATLAB code and publicly available. This work used the latest publicly available version, ADVISOR 2002.
Typically, the accessory load required to drive the coolant and oil pump would have been accounted for in the engine model.
The combustion efficiency of a typical PFI gasoline engine is between 90% and 95% (Heywood 1988), i.e., 5–10% of the total energy available in the fuel would escape the engine primarily in the form of CO, unburned hydrocarbons (HC) and soot. These exhaust emissions also have carbon content which, if ignored, would distort the CO2 calculation based on the fuel consumption and the fuel’s carbon weight fraction, although under normal conditions, the after-treatment system of a modern vehicle would typically convert the bulk of the exhaust emissions to CO2.
As of 2007, conventional gasoline and diesel cars accounted for 99.7% of the total passenger car fleet in Great Britain.
The hybrid electric model, Toyota Prius, was excluded, because even with the fast growth of hybrid vehicles seen in recent years, the percentage of hybrid vehicles in the whole passenger car fleet in 2007 in Great Britain was still insignificant at only ~0.1%.
The real-world average traffic speed would be a value between the peak and off-peak figures but not available, as the number of vehicles and kilometers traveled during peak and off-peak time were unknown.
References
Argonne National Laboratory (2009) The Greenhouse Gases, Regulated Emissions, and Energy Use in Transportation (GREET) model (http://www.transportation.anl.gov/modeling_simulation/GREET/index.html). Accessed 31 Aug 2009
Automotive Engineering International Online (2008) SAE (http://www.sae.org/mags/aei/2873). Accessed 31 Aug 2009
Bandivadekar A, Bodek K, Cheah L, Evans C, Groode T, Heywood J, Kasseris E, Kromer M, Weiss M (2008) On the road in 2035—reducing transportation’s petroleum consumption and GHG emissions. Technical report LFEE 2008–05 RP, Massachusetts Institute of Technology
BERR (2008) Investigation into the scope for the transport sector to switch to electric vehicles and plug-in hybrid vehicles. Report jointly by Arup and Cenex on behalf of the Department for Business Enterprise and Regulatory Reform (BERR) and the Department for Transport (DfT) (http://www.berr.gov.uk/Publications/index.html). Accessed 31 Aug 2009
Carfolio.com database (http://www.carfolio.com/specifications/)
Delucchi MA (2003) A Lifecycle Emissions Model (LEM): lifecycle emissions from transportation fuels, motor vehicles, transportation modes, electricity use, heating and cooking fuels, and materials. UCD-ITS-RR-03-17 Main Report and appendices, Institute of Transportation Studies, University of California, Davis (http://www.its.ucdavis.edu/people/faculty/delucchi/index.php). Accessed 31 Aug 2009
EU Directive 70/220/EEC (2007)
Heywood J (1988) Internal combustion engine fundamentals. McGraw-Hill, New York
JRC/EUCAR/CONCAWE (2008) Well-to-wheels analysis of future automotive fuels and powertrains in the European Context. Technical reports and appendices, Version 3 (http://ies.jrc.ec.europa.eu/WTW)
Markel T, Brooker A, Hendricks T, Johnson V, Kelly K, Kramer B, O’Keefe M, Sprik S, Wipke K (2002) ADVISOR: a systems analysis tool for advanced vehicle modeling. J Power Sources 110:255–266
Schwaderlapp M, Koch F, Dohmen J (2000) Friction reduction—the engine’s mechanical contribution to saving fuel. FISITA World Automotive Congress
Transport Statistics Great Britain (TSGB) database (2001–2007) Department for Transport (http://www.dft.gov.uk/pgr/statistics/datatablespublications/). Accessed 31 Aug 2009
Wipke KB, Cuddy MR, Burch SD (1999) ADVISOR 2.1: a user-friendly advanced powertrain simulation using a combined backward/forward approach. IEEE Trans Veh Technol 48(6):1751–1761
Acknowledgments
The authors wish to thank their colleagues from the Greenhouse Gas Intensity Analysis Team at Shell Global Solutions for their efforts and useful remarks in reviewing this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
The Tank-to-Wheels analysis referred to in this paper differs from a typical life cycle assessment in that this paper only attempts to address in-use vehicle fuel consumption and CO2 emission, i.e., the production, dismantling, and final disposal of vehicles is not taken into account.
Electronic supplementary material
Below is the link to the electronic supplementary material.
ESM 1
(DOC 181 kb)
Rights and permissions
About this article
Cite this article
Ma, H., Riera-Palou, X. & Harrison, A. Development of a new tank-to-wheels methodology for energy use and green house gas emissions analysis based on vehicle fleet modeling. Int J Life Cycle Assess 16, 285–296 (2011). https://doi.org/10.1007/s11367-011-0268-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11367-011-0268-8