
Abstract
For cascade reservoirs in river basin, the optimization design for flood limit water level (ODFLL) will be more important at the end of flood season. In this paper, an optimal design model for flood limit water level (ODMFLL) of cascade reservoirs is proposed to simultaneously optimize the flood control risk and economic benefits of reservoir groups in flood season. Also, compensation relationship among reservoirs has been studied to maximize the utility of water resources. Moreover, a modified self-adaptive electromagnetism-like Mechanism (SEM) algorithm is presented to deal with ODFLL problem by considering more than two purposes. In order to analysis the risk of optimizing control schemes, the classical Monte Carlo method, is adopted in this paper. Finally, the case of well-known Cascade Reservoir in Jinsha River (two reservoirs) and Three Gorges Reservoir is implemented for solving ODFLL problem. The simulation results reveal that, compared with original rules of flood limit water level, the ODMFLL can provide better solutions to the problem by raising the flood limit water level of cascade reservoirs and not increasing the flood control risk. Therefore, ODMFLL can rational utilize the water resource of watershed, and reduce the abandoned water in flood season.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
For flood control scheduling, flood limit water level (FLL) refers to water level of the reservoir in order to guarantee the safety of the dam itself and downstream protection area (Chen et al. 2013; Qin et al. 2010). FLL is one of the important parameters in reservoir operation and water resource comprehensive utilization, and it is the key to coordinating contradiction between flood risk and reservoir benefits. A too high FLL reduces the flood control capacity, and threats the safety of the flood control. Conversely, the benefit of reservoir, power generation and water supply, would be impaired if FLL was set at relatively lower level. While, due to considering more about the small probability flood events, the FLL is usually set lower. It is necessary to obligate the sufficient flood control capacity to stay in accordance with the design standards. However, most of water resource in river basin is distributing in the flood season. When the reservoir operates at a relatively low water level, it will not only hurt the economic benefit of hydropower station greatly, but also lead to a great amount of abandoned water. The hydropower resource in river basin has not been utilized reasonably. Especially in low flow years, it failed to make full use of reserved flood control capacity. At the same time, the flood reservoir cannot impound fill because the flood limit water level is too low, which reduces the benefit of hydropower station on dry season seriously. Therefore, there is a serious problem for existing FLL, which cannot take both flood control benefits and economic benefits of reservoir in flood season into account.
In order to optimally design the flood limit water level, many operation strategies and models were proposed. They are dynamic control operation modes based on new “concept”, which is a popular research topic in recent years in China (Zhang et al. 2011b). In 1999, Xiong M. had evaluated the effect of FLL on flood protection risk for Three Gorges dam. Zhou et al. (2006) and Wu et al. (2006) suggested the reasonable scheme of FLL for these reservoirs should be based on isk analysis. The systematic achievements have been obtained on the research of dynamic control of FLL in China by Zhou et al. (2009). The method for dividing the flood season into serveries stages, had been presented by many researchers recently(Xiaohua et al. 2010). Yun and Singh (2008) and Cao et al. (2008) proposed multiple duration limited water level and dynamic limited water level for flood control considering the water supply of reservoir. Li et al. (2010) proposed a dynamic control operation model considering the inflow forecasting error and uncertainty of the flood hydrograph shape, while the risk of dynamic control of reservoir flood limited water level within different flood forecast error boundary was studied by Zhang et al. (2011a). But these stage strategies also have some limitations as follow: (1) It cannot give a rigorous theoretical basis for the dividing flood season; (2) the flood limit water level dynamic control based on flood season by stages rise the flood risk to some extent.
Besides, more and more reservoirs have been built in recent years, and the fragmentation of runoff for the operation of cascade reservoirs operation has made the constraints more complicated. With the extensive construction of reservoirs, hydraulic connection and complementary relationship among cascade reservoirs are changed. In recent years, the situation of multipurpose reservoir operation with outdated and highly subjective technology has been ameliorated by some researchers adopting many intelligent methods, such as non-dominated sorting genetic algorithm-II (NSGA-II) (Deb et al. 2002), multi-swarm particle swam optimization algorithm (MSPSO) (Ostadrahimi et al. 2012) and multi-objective cultured differential evolution algorithm (MODE) (Qin et al. 2010). These algorithms in the field of multipurpose reservoir operation problems have achieved various degrees of success. While, the key problem on the cascade reservoirs system is how to achieve raised FLL and more conserved water without adding flood risk. However, existing research methods are unsuitable for use when the system is gradually developing into complexity and dimensionality. For instance, the operative interdependence among cascade reservoirs is not clearly demonstrated in current models. The coordination relationship among multiple reservoirs operation is ignored, which may lead to mismatching operation and insufficient comprehensive benefits of cascade reservoirs.
The study about the problems above is not comprehensive, but they are the key to limited water level optimizing control. To develop an operation model for optimizing reservoir flood limit water level in a cascade reservoirs system, this paper maintains the integrity of the entire flood season, considers about the new hydrological and scheduling environment, and establishes a joint optimal design model for flood limit water level (ODMFLL) of cascade reservoirs. Meanwhile, a multi-objective self-adaptive electromagnetism-like Mechanism (SEM) algorithm is introduced in this paper to achieve a successful application. Finally, a case study is implemented for optimizing design of the flood limit water level of the cascade reservoirs system considering the extreme risk, well-known Cascade Reservoir in Jinsha River (xiluodu and xijiaba reservoirs) and Three Gorges Reservoir (JTCR-TGR) by using the proposed SEM method. The results reveal that the improved model can get the highest flood limit water level while meeting the flood control requirement at the same time, which can reduce the abandoned water of the cascade reservoirs system in the flood season. Meanwhile, the optimizing schemes can suggest the reasonable FLL for achieving the utilization of the flood resource in river basin reasonably.
Subsequent section details the ODMFLL formulation with the previously mentioned development. Based on the SEM method, the optimization design for flood limit water level of JTCR-TGR system was completed to verify the performance of ODMFLL. Results and analysis are discussed before the Conclusion.
2 Model Formulation for OPTIMIZING CONTROL the FLL
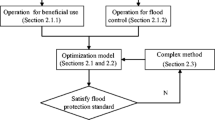
Constrained by the flood safety requirements of dams and downstream, productive head of the cascade reservoirs is running in a low head. This cannot give full play to the reservoir benefit, and has failed to effectively take advantage of abundant water resources in flood season. In order to alleviate contradiction between flood control and benefits of the cascade reservoirs in flood season, this paper establishes an ODMFLL of reservoirs which meets the flood control standard of river basin. The proposed model optimizes the design of the FLL of the cascade reservoir.
2.1 Objective Function
Considering the completeness of the flood season, we set only one FLL of the last reservoir without staging the flood season. In this model, the aim is to maximize the FLL based on meeting the requirements of flood safety. It is formulated as:
Where Z lFLL is the flood limit water level of the last reservoir?
2.2 Constraints
The hydrological and scheduling environment of cascade reservoirs has been great changed when the more and more reservoirs are built. The traditional methods controlling FLL are not fitted for the more complex constraint. In order to make model more practical, the article blends flood control threshold, the hydraulic and power compensation characteristic of cascade reservoirs in the proposed model. In this paper, the specific constraints of the cascade reservoirs system are modified as follows:
-
1)
Water balance equation
In general, evaporation and leakage losses from reservoirs during flood periods are an insignificant portion of the total flow and are therefore not included in the model (Windsor 1973). Thus, for each reservoir in RBFC system, the water balance equation is in common and shown as:
$$ {V}_{t+1}^k={V}_t^k+\left({I}_t^k-{Q}_{div,t}^k-{Q}_{aband,t}^k-{Q}_{loss,t}^k\right)\varDelta t;k=1,2,\dots, K;t=1,2,\dots, T $$(2)Where V k t + 1 is the k-th reservoir capacity at the t-th period; I k t , Q k div,t , Q k aband,t and Q k loss,t are the k-th reservoir inflow, water release of power generation, abandoned discharge and loss flow at the t-th period, respectively; the elements of loss flow include the evaporation, water supply, leakage and navigation, and so on, while the evaporation is ignored in this research; ∆t is the time interval of a period.
-
2)
Upstream water level upper and lower limit
This constraint is uniform for each reservoir in a cascade reservoirs system. As follow:
$$ {Z}_{t, \min}^k\le {Z}_t^k\le {Z}_{t, \max}^k $$(3)Where Z k t , Z k t,min and Z k t,max are the water level, maximum and minimum limit water level of k-th reservoir at the t-th period, respectively. In this inequality constraint, the feasible region of the limit is decided by the maximum and minimum limit water level value.
-
3)
Water discharge capability limit
Corresponding to different water levels, reservoir spillway facilities have different water discharge capabilities.
$$ {Q}_{out,t}^k\le \min \left({Q}_{\max}\left({Z}_t^k\right),{Q}_{Pflood}^k\right) $$(4)Where Q k out,t is the k-th reservoir water release, Q max(Z k t ) is the function to search maximum discharge capability for the corresponding water level Z k t of the k-th reservoir at the t-th period. While Q k Pflood is the maximum water discharge to keep downstream area from being submerged.
-
4)
Water discharge limit
This restriction becomes more complex caused by the fragmentation of catchment runoff and the addition operation purpose. So this constraint can be rewritten as:
$$ \min \left({Q}_{t, \max}^k,{Q}_{n, \max}^k\right)\ge {Q}_{out,t}^k\ge \max \left({Q}_{t, \min}^k,{Q}_{s, \min}^k,{Q}_{n, \min}^k\right) $$(5)Where Q k t,max and Q k t,min are the maximum and minimum limit water release of k-th reservoir at the t-th period, respectively; Q k s,min and Q k n,min are the minimum limit water release of k-th reservoir at the t-th period for the water supply and navigation severally; on the contrary, Q k n,max is the maximum limit water release for the objective.
-
5)
Generation limits
This constraint can be written as:
$$ {N}_{t, \max}^k\ge {N}_t^k\ge {N}_{t, \min}^k $$(6)Where N k t is the output power of k-th reservoir at the t-th period; N k t,max and N k t,min are the maximum and minimum generation limits of k-th reservoir at the t-th period severally.
3 Self-adaptive Electromagnetism-like Mechanism algorithm
Electromagnetism-like Mechanism (EM), proposed by Birbil SI and Fang SC in 2003, is a novel optimization algorithm of intelligent methods (Birbil and Fang 2003). EM algorithm is a population-based stochastic algorithm, which is quite simple, strong robust, significantly fast and effective (Birbil et al. 2004). EM has been introduced to solve various single objective optimization problems successfully, such as the applications covering areas of electronics (Lee and Jhang 2008), machine scheduling (Chang et al. 2009), and Cellular Manufacturing (Wei et al. 2012). Moreover, the performance of a modified EM algorithm has been demonstrated comparing with MOCDE and NSGA-II by (Zhou et al. 2014). EM originates from the electromagnetism theory of physics by considering each sample point as a charged particle spread over the solution space (Tsou and Kao 2008). At first, the distance from the best point for each particle is calculated for ascertaining the charge of every particle. Afterwards, EM computes interaction force of each other by using the charge of two particles. Meanwhile, total force vector of every particle has been obtained through superposing vectorally the forces from each of the other points separately. Finally, next generation has been acquired by moving the particles according to the total force vector. The fundamental procedures of EM include initialization of population, local search, calculation of total force, and movement of particles. The basic strategy of EM can be described as follows.
-
Initialization of population (Initialize())
The initialization starts to ensure some parameters such as the population size N, dimensionality D of decision variable X i and the bound of initial solution. The operation of the initialization is show as:
$$ {X}_d^i={L}_d+\lambda \cdot \left({U}_d-{L}_d\right)i=1,2,3,\dots \dots, N;d=1,2,3,\dots, D $$(7)Where X i d denote the d-th of the X i; i is the index of the generation: U d and L d are the upper and lower bound of X i d , respectively; λ is a uniform distributed random parameter, using to control the step of the X i d change.
-
Local search (LocalSearch())
The procedure of the local search is used to do an optimal search to different local aspects of optimization goals. In this procedure, the operation set local search parameters differently, such as iterations LocalNum and step coefficient δ, to satisfy the requirement of different target:
$$ {X}_d^i=\left\{\begin{array}{l}{X}_d^i+{\lambda}_1\left(\delta \max \left({U}_d-{L}_d\right)\right) if\ rnd\left(\right)>0.5\\ {}{X}_d^i-{\lambda}_1\left(\delta \max \left({U}_d-{L}_d\right)\right) otherwise\end{array}\right. $$(8)Where rnd() and λ 1 is a random Numbers of the uniform distribution between [0, 1]; the size of δ determines the step of the local search.
-
Calculation of total force (CalF())
Total force vector F i of the X i is calculated to confirm the moving direction and degree of X i. To some extent, the global search scope has been influenced by F i, as follows:
$$ {F}^i={\displaystyle \sum_{j\ne i}^N\left\{\begin{array}{c}\hfill \left({X}^j-{X}^i\right)\frac{q^i{q}^j}{{\left\Vert {X}^j-{X}^i\right\Vert}^2} if\ f\left({X}^j\right)<f\left({X}^i\right)\hfill \\ {}\hfill \left({X}^i-{X}^j\right)\frac{q^i{q}^j}{{\left\Vert {X}^j-{X}^i\right\Vert}^2}f\ f\left({X}^j\right)\ge f\left({X}^i\right)\hfill \end{array}\right\},\forall i} $$(9)Where f(X i) is the value of objective function, Eq. 1; and q i denote the quantity charge of X i:
$$ {q}^i= \exp \left(-D\frac{f\left({X}^i\right)-f\left({X}^{best}\right)}{{\displaystyle \sum_{k=1}^N\left(f\left({X}^k\right)-f\left({X}^{best}\right)\right)}}\right),\forall i $$(10)Where X best is the best point of X.
-
Movement of particles (Move())
Next generation is been acquired by moving the particles with the procedure of Move(). According the F i of X i, the operation acquires the next generation by moving and evolving the X i:
$$ {X}^i=\left\{\begin{array}{l}{X}^i+\lambda \cdot norm\left({F}^i\right)\left(U-{X}^i\right) if\ {F}^i>0\\ {}{X}^i+\lambda \cdot norm\left({F}^i\right)\left({X}^i-L\right) otherwise\end{array}\right.\lambda \in U\left(0,1\right) and\ norm\left({F}^i\right)=\frac{F^i}{\left\Vert {F}^i\right\Vert } $$(11)Where U(0,1) is a simple function for generating random Numbers of the uniform distribution between [0, 1]; U and L are upper and lower bound of X i, respectively.
3.1 Modification of EM Operators
The procedure of local search is going to move the particles toward the local minimums using a neighborhood search procedure. The local search method used in this algorithm is very simple(Alikhani et al. 2009). In this paper, a simple self-adaptive mechanism is added to the local search operation for adapting the features of changed hydrological environment. The new local search operator improves the accuracy of solution and avoids the premature convergence. The modification of this step revises the evolution step of EM, as follow:
Where Selfadapt(g) is the g-th self-adaptive function; g is the index of the generation:
Where G denotes the total evolution number; α is the self-adaptive parameter; count and r is the number and threshold value of stagnation, severally.
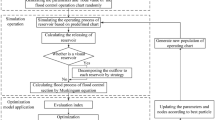
3.2 General Scheme of SEM
The General Scheme of SEM is described in Table 1.
4 Case Study: Joint Optimal Design for Flood Limit Water Level of JTCR-TGR System
4.1 Encoding scheme of solutions and Constraint handling method
In the proposed MOSEM algorithm, the encoding scheme of solutions for RFCO problem is that a set of water discharge volumes is employed as decision variables of individuals, as follows:
Considering to the character of Three Gorges Reservoir and the complex constraints of the RFCO problems, that is difficult to deal with those constraints with efficiency by using the penalty method. Because the main constraints are water level limit and release limit, the following constraints conversion strategy is applied in this paper to simplify the constraint handling procedure. For a period t, the water level limits [Z min s,t + 1 , Z max s,t + 1 ] at the next period can be converted to a range of water release limits [Q ′ min s,t , Q ′ max s,t ] by using the water balance equation. Then the range is mixed with the primary scope of water release, which is given by reservoir features and operation regulations, to get an intersection set of water discharge volume limits. The intersection set [Q min s,t , Q max s,t ], used as the feasible of X in SEM, is the feasible water discharge volume range at the t-th period, while the constraints has been simplify.
4.2 System Description
The JTCR-TGR system is a complex water resource conservancy system. Figure 1 shows the geographical location and topological structure of the JTCR-TGR system, which consists of two major river basins: the lower reaches of the Jinsha River and the Yangtze River.

Schematics of the JTCR-TGR system’s geographical location and topological structure
Jinsha River is located in the upper reaches of the Yangtze River. In lower reaches of the Jinsha River, there are two world-class reservoirs, Xiluodu and Xiangjiaba reservoir. Xiluodu reservoir is a project whose first aim is power generation. Xiangjiaba reservoir is the last of JTCR, and the spacing of Xiangjiaba and Xiluodu is 157 km.
The Yangtze River, which is the first for the basin area, length, water quantity in Asia, stems from the TangGuLa Mountain in the Tibetan Plateau and pours annual runoff of 960 billion m3 into the East China Sea. The Three Gorges Reservoir (TGR), situated in the middle reach of Yangtze River with the catchment area of about 1 million km2, is the largest water Conservancy project in the world. The TGR site is in Sandouping of Yichang City, Hubei Province. The comprehensive utilization of TGR system includes the flood control, hydropower production, navigation and drought resistance, while the foremost aim of TGR system is minimizing flood risk.
Now, to solve the problems above, more and more reservoirs have been built. Among them, TGR can effectively control flood to protect the region in the middle and lower reaches of the Yangtze River. The JTCR is the important project for meeting the flood control requirements of the downstream protection area in the Chuanjiang River. Main parameters of JTCR and TGR are presented in Table 2.
4.3 Scheduling Rules in the Cascades Reservoirs System
In JTCR-TGR System, the scheduling assignment of the flood control is to prevent the flood harm of the Chuanjiang River and Jingjiang River. The main points of scheduling rules are detailed as follows:
First, flood control rules are formulated for Chuanjiang River, the rule curves of TGR are shown in Fig. 2:

rule curves of TGR
-
(1)
first, the flood control storage of 0.9 billion m3( usual flood storage of Xiangjiaba reservoir) is obligated for Yibin city;
-
(2)
If runoff of Lizhuang hydrologic station is less than 40,000 m3 /s and inflow of Cuntan is greater than 53,100 m3 /s, the impounding speed of JTCR is controlled under 3000 m3 /s;
-
(3)
If runoff of Lizhuang hydrologic station is between 40,000 and 54,500 m3 /s, the impounding speed of JTCR is inferior to 9500 m3 /s;
-
(4)
If runoff of Lizhuang hydrologic station is greater than 54,500 m3/s, the impounding speed of JTCR is less than 11,000 m3 /s.
And second, the rules are decided for Jingjiang River
-
(1)
when the inflow of Xiluodu reservoir is less than 20,000 m3 /s, the impounding speed of JTCR is controlled under 6000 m3 /s;
-
(2)
when the inflow of Xiluodu reservoir is greater than 20,000 m3 /s, the impounding speed of JTCR of JTCR is controlled under 8000 m3 /s;
-
(3)
If the current flood inflow is not big (frequency is no less than 1 %), the discharge volume of TGR is controlled under 55,000 m3 /s;
-
(4)
If flood frequency is between 1 and 0.1 %, the discharge volume of TGR is controlled under 78,000 m3 /s;
-
(5)
The maximum upstream water level limit of TGR is 175 m, and if the upstream water level reaches 175 m, then all the inflows will be discharged to ensure the safety of the dam.
4.4 Parameters Settings
The proposed SEM algorithm is implemented to solve ODFLL problems of TGR, and parameters settings of SEM are as follows: he population size N = 50, the maximum number of generation G is selected as 1000, the maximum iteration number for local search operation LSITER is set as 10, threshold value of stagnation r is set as 5, the local area parameter δ = 0.29 and the self-adaptive parameter α is selected as 0.8955.
4.5 Results and Risk Analysis
For the safety of flood control in the Yangtze River, the TGR regulates the flood to raise the flood control standard of Jingjiang Reach to the hundred years. The 1 % flood water level for the new rules and preliminary design result are 171 and 166.9 m (Yang Chunhua et al. 2010). The 1 % frequency floods (100-year flood) in 1954, 1981, 1982, 1987, 1998, 1999, 2009 and 2010, are adopted as typical flood inflows. With the parameter settings mentioned in above section, SEM and ODMFLL are applied to deal with the eight typical floods for the optimization design of FLL. Optimal schemes of TGR are operated according to the FLL, storage, operation condition of JTCR and flood control requirements of downstream river. The 1 % flood water level for preliminary design result, 166.9 m, is chosen as the maximum limit water level. The critical risky flood limit water levels (CRFLL) and corresponding utilized flood control capacity (CUFCC) are given in Table 3 for different operating situations, which include single operation (mode 1) for TGR and joined optimal scheduling with JTCR-TGR System (mode 2). The TGR water level, inflow and outflow processes of some part of result in Table 3 are shown in Fig. 2.
In Table 3, the differences between different operation situations show that the CRFLL of mode 2 is higher than that of the single operation. In 1954, comparing with mode 1, the FLL of mode 2 raised to 153.81 m, which is the minimum increment in the eight typical floods. While the beneficial capacity and generation of TGR increases 23.3 × 108 m3 and 3.45 × 108KWh in mode 2. Moreover, from mode 1 to mode 2, the average increments of FLL, generation and beneficial capacity are 4.9 m, 3.3 × 108KWh and 30.8 × 108 m3 (Fig. 3).

The water level, inflow and outflow processes of TGR in join optimal scheduling
To make sure of the safety of flood control, the lowest of CRFLLs for mode 1 and 2, 147 and 153 m, have been chosen as the FLL of TGR in flood season. In this case, the FLL of TGR is raised from 145 to 147 m in mode 1. Moreover, in mode 2, the FLL is raised to 153 m with the compensative regulation by JTCR, which means that the beneficial capacity of TGR has increased by 3.16 billion m3.
To analyze the flood risk of TGR optimization design FLL, Monte Carlo method has been used in this paper. Ten thousand groups of inflow flood sequence are generated according to each sample, typical flood process of the 8 years. With simulating flood regulating calculation, the highest water level series are achieved for calculating flood risk of operation schemes. The risk probabilities of two FLLs have been counted considering the different flood control standards in eight typical years. P1 and P2 are the risk probability that the highest water level over 166.9 and 171 m. The results are shown in Table 4.
In Table 4, the flood risks of each typical year for different CRFLL are detailed for analyzing the advantage of two scheduling modes. For 1 % flood water level of preliminary design result, the risk probability is almost larger than we expect. The reason is that the CRFLL is the maximum FLL for 166.9 m, and highest water levels will reach over 166.9 m more easily when the typical flood sequence is amplified with 10 %. The average risk probabilities are 17.38 and 13.98 % for these CRFLLs respectively. However, the average risk rate of mode 2 is 13.98 %, which is about 4 % less than mode 1. Moreover, for 1 % flood water level of the flood control new rules, 171 m, the risk probability of mode 2 in all typical years is 0.00 %, which is less than mode 1. It means that the CRFLL, obtained by the ODMFLL, is not in violation of the new rules of flood control, and meets the demand for river flood control. Compared with mode 1, the CRFLL of mode 2 doesn’t increase the risk of damaging the river flood control standard. With the compensative regulation by JTCR, flood limit water level of TGR can be raised from 147 to 153 m without increasing the risk of flood control for the cascade reservoirs based on maintain the integrity of the entire flood season. In this case, the beneficial capacity and benefit of TGR will be increased in the whole flood season.
For example, for 153 m, the FLL of mode 2, risk rate using flood control forecast operation mode is 1.04 %, which is 2 % less than using conventional operation mode.
5 Conclusions
Flood limit water level (FLL) is the upper limit water level for utilizable benefit of water reservoirs in the flood season. In china, the traditional design of FLL usually puts more emphasis on considering the flood control safety. The traditional approaches have difficulties in dealing with the complexity of the massive constraints for optimizing design of the flood limit water level of cascade reservoirs. To solve the problems above, this paper proposed an optimal design model for flood limit water level (ODMFLL) of cascade reservoirs considering the safety demand, the flood control risk, the flood resource utilization rate and so on. Cascade Reservoir in Jinsha River (xiluodu and xijiaba reservoirs) and Three Gorges Reservoir (JTCR-TGR) as a case has been applied with ODMFLL. The results indicate that ODMFLL can suggest the reasonable scheme of limited water level without increasing the risk of flood control for the cascade reservoirs based on maintaining the integrity of the entire flood season. The optimal model practicability is certified successfully for solving the problem of OCFLL.
Moreover, it should be pointed out that there are also some blemishes in the proposed model. For instance, the method is more focused on benefits of TGR, which is the largest water conservancy project in the world. For future studies, there would be much more attention paid to the popularization for most cascade reservoirs systems.
References
Alikhani MG, Javadian N, Tavakkoli-Moghaddam R (2009) A novel hybrid approach combining electromagnetism-like method with Solis and Wets local search for continuous optimization problems. J Glob Optim 44(2):227–234
Birbil SI, Fang SC (2003) An electromagnetism-like mechanism for global optimization. J Glob Optim 25(3):263–282. doi:10.1023/a:1022452626305
Birbil SI, Fang SC, Sheu RL (2004) On the convergence of a population-based global optimization algorithm. J Glob Optim 30(2–3):301–318. doi:10.1007/s10898-004-8270-3
Cao Y-q, Han Y (2008) Wang B-d study on control scheme of reservoir limited water level based on water supply risk. In: Wireless communications, networking and mobile computing, 2008. WiCOM ‘08. 4th International Conference on, 12–14 Oct. 2008. pp 1–4. doi:10.1109/WiCom.2008.2439
Chang PC, Chen SH, Fan CY (2009) A hybrid electromagnetism-like algorithm for single machine scheduling problem. Expert Syst Appl 36(2):1259–1267. doi:10.1016/j.eswa.2007.11.050
Chen J, Guo S, Li Y, Liu P, Zhou Y (2013) Joint operation and dynamic control of flood limiting water levels for cascade reservoirs. Water Resour Manag 27(3):749–763. doi:10.1007/s11269-012-0213-z
Deb K, Pratap A, Agarwal S, Meyarivan T (2002) A fast and elitist multiobjective genetic algorithm: NSGA-II. Evol Comput IEEE Trans 6(2):182–197. doi:10.1109/4235.996017
Lee KC, Jhang JY (2008) Application of electromagnetism-like algorithm to phase-only syntheses of antenna arrays. Prog Electromagn Res 83:279–291. doi:10.2528/pier08060402
Li X, Guo S, Liu P, Chen G (2010) Dynamic control of flood limited water level for reservoir operation by considering inflow uncertainty. J Hydrol 391(1–2):126–134. doi:10.1016/j.jhydrol.2010.07.011
Ostadrahimi L, Mariño M, Afshar A (2012) Multi-reservoir operation rules: multi-swarm PSO-based optimization approach. Water Resour Manag 26(2):407–427. doi:10.1007/s11269-011-9924-9
Qin H, Zhou JZ, Lu YL, Li YH, Zhang YC (2010) Multi-objective cultured differential evolution for generating optimal trade-offs in reservoir flood control operation. Water Resour Manag 24(11):2611–2632. doi:10.1007/s11269-009-9570-7
Tsou CS, Kao CH (2008) Multi-objective inventory control using electromagnetism-like meta-heuristic. Int J Prod Res 46(14):3859–3874. doi:10.1080/00207540601182278
Wei N-C, Lin H-K, Wu P (2012) An electromagnetism-like mechanism for solving cell formation problems. Sci Res Essays 7(9):1022–1034. doi:10.5897/SRE11.967
Windsor J (1973) Optimization model for reservoir control. Water Resour Res 9(5):1219–1226
Wu Z, Hu C, Wang B, Liu H (2006) Risk analysis on limited water level of reservoirs in flood season and flood control system in midstream and downstream of Yellow River. J Hydraul Eng 37(6):641–648
Xiaohua D, Ji L, Yinghai L, Huijuan B, Xia D (2010 ) Dynamic application and risk analysis of flood control water level to the three gorges reservoir by utilizing mid-term inflow forecasts. In: Power and Energy Engineering Conference (APPEEC), 2010 Asia-Pacific, 28–31 March 2010. pp 1–5. doi:10.1109/appeec.2010.5449235
Yang C, Xu J, Dong L (2010) Flood Limit Level Study for Three Gorges Reservoir under Different Compensation Operation. Water Power 36(8):15–18
Yun R, Singh VP (2008) Multiple duration limited water level and dynamic limited water level for flood control, with implications on water supply. J Hydrol 354(1–4):160–170. doi:10.1016/j.jhydrol.2008.03.003
Zhang Y, Wang G, Peng Y, Zhou H (2011a) Risk analysis of dynamic control of reservoir limited water level by considering flood forecast error. Sci China Technol Sci 54(7):1888–1893. doi:10.1007/s11431-011-4392-2
Zhang YP, Wang GL, Peng Y, Zhou HC (2011b) Risk analysis of dynamic control of reservoir limited water level by considering flood forecast error. Sci China Technol Sci 54(7):1888–1893. doi:10.1007/s11431-011-4392-2
Zhou H, Dong S, Wang B, Wang G, Zhang X, Deng O, Han LI (2006) Study of combined flood control forecast operation manner and limited water level in reservoir group. J Dalian Univ Technol 46(3):401–406
Zhou H, Wei LI, Zhang C (2009) Research on schemes optimization of dynamic flood control limited water level of a reservoir. J Hydroelectric Eng 28(4):27–32
Zhou J, Ouyang S, Wang X, Ye L, Wang H (2014) Multi-objective parameter calibration and multi-attribute decision-making: an application to conceptual hydrological model calibration. Water Resour Manag 28(3):767–783. doi:10.1007/s11269-014-0514-5
Acknowledgments
This study is financially supported by the National Natural Science Foundation of China (No. 51239004).
Author information
Authors and Affiliations
Corresponding author
Appendix A
Appendix A
Rights and permissions
About this article

Cite this article
Ouyang, S., Zhou, J., Li, C. et al. Optimal Design for Flood Limit Water Level of Cascade Reservoirs. Water Resour Manage 29, 445–457 (2015). https://doi.org/10.1007/s11269-014-0879-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11269-014-0879-5