
Abstract
Implementation of monitoring strategy for increasing the efficiency of groundwater pollutant source characterization is often necessary, especially when only inadequate and arbitrary concentration measurement data are initially available. Two main parameters that need to be estimated for efficient and accurate characterization of groundwater pollution sources are: location of the source and the time when the source became active. Complexities involved with the explicit estimation of the time of start and source activity have not been addressed so far in previous studies. The main complexity arises due to the fact that the spatial location and time of activity are inter-related. Therefore, specifying one and solving for the other simplifies the source characterization problem. Hence, in this study, both the source location and time of initiation are treated as unknowns. The developed methodology uses dynamic time warping distance in the linked simulation-optimization model to address some complex issues in designing a monitoring network to efficiently estimate source characteristics including the time of first activity of unknown groundwater source. Performance of the developed methodology is evaluated on illustrative contaminated aquifer. These evaluation results demonstrate the potential use of the developed methodology.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In recent years there has been an emphasis on contamination prevention, detection and remediation of contaminated groundwater aquifers. For any contamination remediation strategy to work efficiently, it is essential to know the pollutant source characteristic. These characteristics include type of source (point, areal, etc.), spatial location and extent of the source (source location), release pattern of the source over the period of its activity (release history) and contaminant flux released by source as function of time (source magnitude). Out of all the characteristics listed above, three characteristics are particularly important (i) source Location, (ii)release history and (iii) source magnitude (Pinder et al. 2009).
In most instances, one or more characteristics of the source remains unknown at the time of detection of contamination in an aquifer, either due to inaccessibility of the pollutant source or due to lack of any previous information. In such cases the source characterization has to be undertaken by using measured information from a set of monitoring wells in the zone of contamination. This study proposes and evaluates a new methodology for designing a dedicated monitoring network network for improving the efficiency of estimating the time of initiation of contaminant source, and its location as well as magnitude. The three steps involved in the proposed methodology are:
-
i
Design of a dedicated monitring network for source identification using dynamic time warping (DTW)distance information for initial source estimation.
-
ii
Application of the designed monitoring network to obtain concentration measurement data.
-
iii
Utilize these concentration measurements for accurate characterization of contaminante source.
1.1 Monitoring Network Design for Source Characterisation
Ascertaining various characteristics of the contaminant sources from available measured information is an inverse problem as it requires solving groundwater flow and transport equations backwards in time and space. Moreover, groundwater pollutant source identification has been classified as an ill-posed one due to non-uniqueness of solutions (Datta B 2002). Also, the solution of this problem is highly sensitive to measurement errors either in the observation data or model parameters (Sun 1994).
The accuracy and efficiency of identified source characteristics depends on the number and spatial location of the monitoring wells. Since the number of monitoring wells is limited due to cost considerations or other physical limiting factors such as inaccessibility for drilling etc., it is essential to design an optimal monitoring network for accurate and computationally efficient groundwater source characterization.
Monitoring network design problem for groundwater quality management has been widely studied with different objectives. Detailed review of methods implemented for monitoring network design are reported in Loaiciga et al. (1992), Minsker B (2003), and Kollat et al. (2011). Design objectives of monitoring networks vary widely depending on the need for design. Most of the previous research focuses on monitoring networks for leak detection from known contaminant sources (such as landfills, large spills, historically contaminated land etc.). Some specific objectives considered in these studies are minimization of undetection, minimization of number of wells, maximization of probability of detection, minimization of area contaminated at detection etc. A detailed account of such methods is presented in Dhar and Datta (2010). Some of the researchers have attempted to link the contaminant monitoring locations with the efficiency of source characterization (Bagtzoglou et al. 1991; Mahar and Datta 1997; Chadalavada et al. 2011b; Dhar and Datta 2010). Bagtzoglou et al. (1992) presented a method for probabilistic estimation of source locations and spill time histories. Mahar and Datta (1997) and Chadalavada et al. (2011b) proposed models for design of monitoring networks to improve efficiency of source identification. Most of these approaches however, assume that the potential or actual source locations as well as their start times are approximately known.
Although the duration of activity and timing are assumed unknown, an implicit assumption is required regarding the time of initial activity with respect to the initial detection of contamination in the aquifer. The spatial location and time of activity are inter-related. Therefore, specifying one and solving for the other simplifies the source characterization problem. In this study, both the source location and time of initiation are treated as explicit unknown variables.
1.2 Linked Simulation-Optimization Approach for Source Characterisation
The problem of source release history reconstruction, which assumes the source location as well as time of initial activity to be known is the most widely studied variation of source characterization. Several methods have been used to reconstruct the release histories of unknown groundwater pollutant sources. These methods can be broadly classified as optimization approaches, analytical solutions, deterministic direct methods and probabilistic and geo-statistical simulation approaches. A detailed review of these methodologies can be found in Atmadja and Bagtzoglou (2001), Michalak and Kitanidis (2004), Bagtzoglou and Atmadja (2005), Chadalavada et al. (2011a) and Sun et al. (2006a, b).
Most of the earlier reported approaches such as linear programming with response matrix approach (Gorelick et al. 1983), nonlinear optimization with embedding technique (Mahar and Datta 1997, 2000, 2001), artificial neural network approach (Signh et al. 2004; Singh and Datta 2004, 2007), constrained robust least square approach (Sun et al. 2006a, b), classical optimization based approach (Datta et al. 2009a, b, 2011), genetic algorithm based approach (Mahinthakumar and Sayeed 2005; Singh and Datta 2006; Aral et al. 2001) and adaptive simulated annealing based approach (Jha and Datta 2013) minimize an objective function representing the difference in measured concentration and simulated concentration at various monitoring locations. We present a methodology to design an optimal monitoring network for estimating the characteristics of an unknown point source pollutant beginning with information obtained from a single arbitrarily located monitoring well. With the concentration measurement data obtained from a single observation well, we implement curve matching technique using dynamic time warping distance to generate initial estimates of source location and its start time. This information is used to identify the best spatial orientation of the next set of monitoring wells. Better estimates of source location and start time are generated with the addition of each subsequent set of monitoring wells in the network. Addition of monitoring wells stops once the maximum permissible number of monitoring wells is reached, or if further addition of wells does not improve the estimates.
With the data collected from all wells in the designed monitoring network we then attempt to reconstruct the contaminant release histories accurately using linked simulation-optimization model solution. The efficiency of developed methodology is tested using data obtained from a illustrative aquifer.
2 Methodology
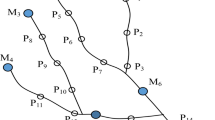
Very often, contamination of groundwater is initially detected in one or more arbitrarily located wells. These wells are referred to as “detection wells” in this study. Figure 1 illustrates a typical study area at the time of initial detection of a contamination event in a multilayered groundwater aquifer. It is assumed that the pollutant was first observed at a single detection well. At this point, from preliminary investigation, it might be possible to locate a finite number of potential source locations as shown in Fig. 1. Any other information related to the likelihood of any of these potential source locations being the actual source location is not available. The pollutant plume boundary is not known and the time at which source activity began cannot be ascertained at this stage.

Illustrative Example of Initial Pollutant Detection
This problem of preliminary source characteristics estimation is formulated as an optimization problem with integer valued decision variables. Continuous variable space is discretized into several intervals with each interval mapped to an integer value. Since the objective of this step is to find the most probable range of various source characteristics values, discretization helps fasten the process of optimization. Candidate solutions for unknown source characteristics are generated by the optimization module. In order to incorporate the physical processes governing groundwater flow and transport, this optimization module is linked with a numerical groundwater flow and transport simulation module. The candidate solutions generated by the search mechanism of the optimization module are used as an input for the groundwater flow and transport simulation module to produce estimated pollutant breakthrough curves at the detection wells. The objective of the optimization module is to minimize dissimilarity, or maximize the matching, between observed pollutant concentration sequence at the detection well, and the estimated sequence generated by simulation. Dynamic time warping (DTW) distance is used as a measure of dissimilarity between two time sequences of concentrations at a location. The preliminary source characteristics estimated in this step are then used to ascertain best location of a finite number of monitoring wells in a network such that it ensures maximum detection of pollutant and hence most effective source characterization. In order to evaluate its performance, the developed methodology is applied to an illustrative example problem.
3 Preliminary Estimation of Unknown Groundwater Pollutant Source Characteristics
The first step in the proposed methodology is to generate preliminary estimates of the following groundwater pollutant characteristics for each of the potential source locations:
-
1.
The likelihood of a potential source location being an actual source location.
-
2.
Duration of activity of source.
-
3.
Lag time between first activity at the source and first detection of contamination.
The developed methodology is based on several assumptions:
-
1.
Contaminant has been detected in at least one arbitrarily located monitoring well and concentration of pollutant in this well has been measured at specified time intervals.
-
2.
Sufficient information exists to set up and calibrate a groundwater flow model of the site.
-
3.
There is only one transient pollutant plume and the plume is not affected by any other pollutant source outside the boundaries of the study area.
-
4.
A finite set of suitable candidate locations for monitoring wells is available.
-
5.
Search domain in space and time is discretized.
-
6.
The source flux has a very low volumetric flow rate (although concentration can be high) and does not affect the hydraulic head distribution in the study area.
If a well is monitored over a specified period of time and the measured pollutant concentration data are plotted against time, it will form a small part of the entire actual pollutant breakthrough curve at the monitored location. This is illustrated in Fig. 2.

Breakthrough Curve at a Monitoring Location
At a given monitoring location M(x,y,z) in a three-dimensional space, the breakthrough curve for pollutant concentration can be expressed as a function of various unknown parameters as shown in Eq. 1.
Where
If all flow and transport parameters are known precisely at every point in the study area, and the pollutant concentrations at a large number of monitoring wells can be measured without any errors, then these error free observations can be utilized to solve for the inverse problem to determine the relative spatial location of the monitoring well with respect to the source, the temporal pattern of release at the source, magnitude of pollutant released over time, and the time lag between beginning of source release and pollutant detection in the initial monitoring well. However, such ideal conditions do not exist in real-life contamination scenarios. Flow and transport parameters are known only at a few points and measurements of pollutant concentration cannot be error free.
Reliable estimates of spatial location, release history and magnitude of pollutant release can generate a near-ideal breakthrough curve. In such a case, only the time lag between beginning of source release and pollutant detection will be unknown. Since the observed values from the detection well form a portion of this near-ideal breakthrough curve, the point on the temporal axis where observed pattern fits the ideal breakthrough curve is indicative of this lag.
Initial estimation of pollutant source characteristics can be based on the similarity between a measured concentration sequence of fixed time length to same-sized (in terms of time) portion of a candidate breakthrough curve. Traditionally, Euclidean distance has been used to measure this similarity. However, this distance measure has several disadvantages when applied to this case:
-
1.
Euclidean distance works well only when the frequency of observed and estimated concentrations match.
-
2.
Any missing data in observed concentration sequence can compromise the effectiveness of this measure.
In this methodology, no prior information on any of the source characteristics is assumed to exist initially. It is more appropriate to use a pattern comparison technique which can estimate the similarity of two time series very efficiently even if their sampling frequencies don’t match, or if some measurements are missing. This can be achieved by using dynamic time warping (DTW) distance.
3.1 Pattern Comparison using Dynamic Time Warping Distance
Pattern comparison techniques have been widely used for speech processing and recognition. In this study, dissimilarity or distance between a test pattern and a set of reference patterns is used as a measure of comparison. The test pattern can be represented as:
where each t i is a vector consisting of measured concentrations at one or more detection wells at time period i, and N is the total number of measurements at any given well over the initial monitoring period ’T’. The set of reference patterns can be represented as \(\left \{\mathbf {R^{1}},\mathbf {R^{2}}, ..... , \mathbf {R^{V}} \right \}\) where each R j is a sequence on the estimated breakthrough curve of equal time length (T) as the test pattern.
where M is the total number of concentration values on the estimated breakthrough curve in a time duration ’T’. The goal of pattern comparison in this study is to identify the reference pattern of time length ’T’ on the estimated breakthrough curve that has minimum dissimilarity (or distance) with the test pattern. In order to determine the global similarity between the test pattern T and any reference pattern R j, the following aspects need to be taken into account:
-
1
Although T and R j are of equal time length, the number of samples in each of these sequences may be different.
-
2
T and R j need not be aligned on the time axis in a well-prescribed manner. This is because the estimated breakthrough curve is being generated with approximations of actual source characteristics and the test pattern is being compared to all same-sized portions of the breakthrough curve.
-
3
Pairs of vectors need to be compared for ascertaining local dissimilarity and facilitating temporal lineup between T and R j.
Therefore, a method to solve this pattern comparison problem must be able to use a local dissimilarity measure and a global method of time alignment. This can be achieved in a number of ways. A detailed discussion of these methods is presented in Rabiner L and Juang BH (1993). In this study, dynamic time warping (DTW) distance was chosen as the appropriate method of pattern comparisonas it is capable of embedded time alignment.
The aim of dynamic time warping is to find a warping path such that the local dissimilarity or distance between the test sequence T and reference sequence R j is minimum. In other words, DTW picks the deformation of time axes of test and reference sequences such that it brings the two time series as close to each other as possible. A warping path ’p’ can be represented as a sequence p = (p 1, p 2, ......p L ) where p l = (n l , m l ) 𝜖 [1 :N] x [1 : M]. The local dissimilarity for any warping path can be defined as shown in Eq. 4. The dynamic time warping (DTW) distance between the test and reference sequence is given by Eq. 5.
where ’d’ is a local dissimilarity function. In this study, Euclidean distance or the l 2 norm is used as the local dissimilarity measure.
3.2 Pattern Comparison using DTW Distance to Estimate the Time of First Activity of Unknown Pollutant Source
An illustrative breakthrough is used to illustrate the methodology and explain how DTW distance can be used as a similarity measure. The observation sequence consists of 16 measurements covering a 900-day period with readings taken every 60 days from the beginning of detection. The location of the pollutant source is assumed to be known. Therefore, for this specified location, it is possible to simulate a template breakthrough curve, covering a span of time since the start of activity of the source. The observed sequence is compared to all similar sized portions of the template breakthrough curve and corresponding dynamic time warping distances are calculated. A few of these comparisons are shown in Fig. 3.

Illustrative Example of Pattern Comparison using Dynamic Time Warping
Figure 3 shows the ideal breakthrough curve and pattern comparison between observed and estimated sequences at various positions in the time domain. The pattern comparison process begins at time t = 0 on the time scale. Since in this case the observations are available over 900 days, the observed sequence is compared with the template sequence on the breakthrough curve for intervals of 90 days. The estimated sequence is normalized and dynamic time warping distance is calculated. The process then moves forward by shifting to the next observation (or by one time step) on the breakthrough curve. In this case, each successive observation on the breakthrough curve is available at a 30-day interval. Hence, in each iteration, the comparison window moves 30 days. The time horizon of this study is assumed to be 30 years.
The observed concentration values are compared with 365 individual estimated concentration sequences. In Fig. 3, five of the possible 365 instances are shown. It should be noted that if the time lag between each successive observed and estimated concentration is the same, and if there are no missing values in the observed sequence, dynamic time warping distance is the same as Euclidean distance. However, the advantage of using dynamic time warping distance is the fact that it aligns observed and estimated sequences on the time scale and hence it is much more robust in dealing with time mismatches and missing data.
In order to illustrate this, time sequence comparison was done with all the 16 values of observed concentration and with four values for t = 120, 360, 540 and 720 missing. The resulting DTW distances are plotted in Fig. 4. It can be observed that the missing observed data do not have any significant impact on the point in time domain where DTW achieves minimum distance. It can be seen in Fig. 4 that the DTW distance reaches its minimum at t = 7500. This indicates that the source activity began approximately 7500 days before the contamination was detected.

Computed DTW Distance over Time
3.3 Initial Source Characteristics Estimation
Unknown pollutant source characteristics are real valued. However, the numerical modelling techniques used to solve the groundwater flow and transport equations in this study are based on finite difference method, where spatial and temporal domain is discretized. Hence, the unknown source characteristics can be mapped to a set of integers that represent this discretization. As an example, the source location can be represented by an integer corresponding to the identity of the discretized cell in the three-dimensional finite difference grid. Similarly, release history can be discretized into a number of stress periods of finite length, and a single integer can represent the number of stress periods since the beginning of the study period in which the source is active. Magnitude of source does not have a significant impact at initial estimation stage, primarily due to the fact that both the test sequence and the reference sequence are normalized on the range (0,1) before being compared. Hence, at this stage, essentially the pattern of increasing or decreasing sequences are being matched and not their precise magnitudes. Integer approximations shift the peak of the breakthrough curve slightly and they also have some impact on the pattern of breakthrough curve. However, it is not very substantial. This is illustrated in Fig. 5. Several breakthrough curves were generated at a given monitoring location using:
-
1
Actual source flux magnitudes
-
2
Source flux magnitudes rounded off to nearest 100s.
-
3
Source flux magnitudes averaged over four stress periods.
-
4
Source flux magnitudes averaged over the entire study period.

Effects of Approximating Source Flux Magnitudes on Breakthrough Curve
It can be seen from Fig. 5 that the peak of the breakthrough curve is shifted most by averaging the source flux values over the entire study period. For all other approximations, the breakthrough curve maintains more or less the same pattern as the original one.
Since integer approximation of the source characteristics does not seem to change the pattern of the breakthrough curve drastically, the problem of initial estimation can be cast into an optimization problem with integer valued decision variables. For every potential source location, the decision variables are:
-
1.
Release history: This variable can take an integer value between 1 and the maximum number of stress periods in the transport model. It indicates the number of stress periods since the beginning in which the given source has been active.
-
2.
Source magnitude: Since the pattern of breakthrough curves and not the exact values of pollutant concentrations are being matched, it is sufficient at this stage to estimate the relative source strength in each of the active source periods. Hence, the values can be discretized and mapped to an integer domain. As an example, if the maximum possible limit of source magnitude is 570 mg/l and the level of accuracy is to the nearest 100 then source strength can take any value between 1 and 6.
In this methodology, a set of discrete candidate source characteristic values is generated by the optimization algorithm and these values are used as input to the forward flow and transport model in order to generate a candidate characteristic curve. The cost function of this candidate solution set is the minimum DTW distance achieved while comparing the observed values to same time-sized portions of candidate breakthrough curve.
Initial estimation of candidate source characteristics can now be represented as an optimization problem as shown in Eq. 6.
Subject to the constraint:
Where
All the steps involved in initial estimation of source characteristics are presented as a flow chart in Fig. 6.

Flowchart Showing the Steps in Initial Estimation
4 Monitoring Network Design for Efficient Unknown Pollutant Source Characterisation
Once the initial estimates of various unknown source characteristics become available, the next step is to choose optimal locations on a monitoring network. The objective of designing a monitoring network for pollutant source identification is to maximize the concentration observed at monitoring locations (Datta 1992; Mahar and Datta 1997; Datta et al. 2013; Chadalavada and Datta 2008). Since monitoring locations can be represented by integer values, the monitoring network design problem can be expressed as an integer programming problem. The objective function for the monitoring network design linked simulation-optimization model in this case is given in Eq. 7.
Subject to the constraint:
Where
With this objective function, the optimization model chooses those monitoring locations where the value of pollutant concentration observed is expected to be maximum for all candidate source locations and associated release history and magnitude. The applicability of this methodology is evaluated by utilizing concentration measurement data obtained from a designed monitoring network for contaminant source identification in a contaminanted aquifer.
5 Performance Evaluation
This section discusses the performance evaluation of the developed methodology for initial estimation of unknown pollutant source characteristics, and subsequent utilization of these estimates to design an optimal monitoring network. In order to evaluate the applicability of this methodology, it is applied to an illustrative study area with synthetically generated concentration measurements over space and time, as well as to a contaminated groundwater aquifer.
5.1 Performance Evaluation Criteria for Initial Estimation of Unknown Pollutant Source Characteristics
The measure of effectiveness of the methodology for initial estimation of source characteristics should be its ability to generate estimated range of source characteristics that contains the actual source characteristics, even if the observed concentration series contains moderate levels of errors. In order to test this, several sets of erroneous observation data were generated with the formulation described in Eq. 8.
Where,
The methodology for initial source characteristics estimation was then applied to an illustrative study area using error-free as well as erroneous concentration measurement data. The effectiveness of this methodology was assessed based its ability to estimate the actual source characteristics.
5.2 Performance Evaluation Criteria for Monitoring Network Design
Efficiency of the methodology for monitoring network design is tested on the premise that the optimal monitoring network should produce better solutions of source characteristics when compared with arbitrary monitoring networks consisting of same number of wells. The methodology for source release history reconstruction, as described in Jha and Datta (2013) is applied using the concentration measurement data obtained from a set of optimal monitoring locations, and then to three sets of arbitrarily located monitoring network consisting of same number of wells. Effectiveness of the monitoring network design methodology is evaluated based on the comparison of results obtained using each set of monitoring network locations.
6 Results and Discussions
This section presents the results of application of the developed methodology for initial estimation of source characteristics and subsequent monitoring network design to an illustrative study area. Results obtained under various scenarios are discussed in detail.
6.1 Study Area
The hypothetical study area is a heterogeneous two-dimensional aquifer measuring 1920 m × 1340 m but irregular in shape as shown in Fig. 7.

Illustrative Study Area
The east and west boundaries are constant head boundaries, whereas the north and south boundariesOriginal and perturbed concentration measurements are plotted are no flow boundaries. There is a pollutant source location and four pumping wells in the area as shown in Fig. 7. The pollutant is first detected at a pumping well named PW2. A variable grid size ranging from 50 m × 50 m to 25 m × 25 m is used for finite difference based numerical computation of groundwater flow and transport equations. Grid size is smaller close to the pumping wells and it expands to regular size further away from pumping wells. This is to enhance the accuracy of numerical flow and transport modelling results. Other important model parameters are listed in Table 1.
A non-reactive pollutant is assumed to originate from a point source in this study. The flow and transport processes are 3-dimensional and transient.
6.2 Initial Estimation of Source Characteristics
In order to test the proposed methodology, an observed concentration sequence was generated at the detection well (PW2) by simulating groundwater pollutant transport using MT3DMS with known source characteristics. Actual source characteristics are listed in Table 2 and the actual release history is shown in Fig. 8. Total time of activity of the source of pollution is 12 years and Fig. 8 shows the average source flux for each year. The observation sequence contains 16 observations at an interval of 30 days each after 6720 days of initial source release. Since real world applications invariably involve erroneous observations, it becomes essential to evaluate the proposed methodology using erroneous data as well. For evaluation purpose, observed pollutant concentration measurements at the designated detection well are generated using MT3DMS as transport simulation model followed by perturbation as per Eq. 8. Original and perturbed concentration measurements are plotted in Fig. 9.

Actual Release History of the Source

Model Generated Observation Sequences with Synthetic Errors
While solving this illustrative example, the entire study period is taken to be 30 years. In actual contamination detection events, the duration of study period should be either based on information related to the beginning of anthropogenic/contaminating activities in the study area gathered during reconnaissance or taken to be sufficiently large. The entire time horizon is divided into 30 stress periods of one year length each.
Since there is no prior information on the actual location of source, regularly spaced locations are chosen to be the potential source locations.
In this study, 101 potential source locations each covering a space of 150 m x 150 m were chosen in the entire study area. The total study period of 30 years is divided into 10 stress periods of three years each for the purpose of initial estimation of source release history. Since the observed concentration sequence is matched with estimated sequence after normalization, it is not very important to estimate exact source release magnitudes. It is sufficient to estimate the relative order of source release magnitudes in each stress period for use in the later stage of accurate release history reconstruction.
Initial source characteristics estimation methodology was applied to all potential sources in order to determine their optimal release history and optimal time lag between detection and source activity. Optimal source characteristics, the lowest DTW distance and time lag between first source activity and its detection have been presented for the 10 best potential source locations, estimated using both error free and erroneous observation sequences in Table 3.
It can be inferred from the results in Table 3 that a multitude of combinations of the source characteristics can produce similar effects at the detection location. For example, sources located at PSL11, PSL26 and PSL10 can each produce a concentration measurement sequence that closely matches the observed sequence with different duration of activity and different values of time lag. This is evident from the objective function values achieved in the first three rows of Table 3. This is an indication of the inherent non-uniqueness of this problem. It was noted during the study that the quality of estimation deteriorates as the random error added to the model-generated synthetic observations increases. For this reason, ranges of various source characteristics have been estimated using erroneous observation sequence containing 5 % random error. These estimations are used in the next step to design an efficient monitoring network specifically for the purpose of precise determination of unknown source characteristics.
6.3 Monitoring Network Design
The estimated release history for each source location from the previous step is used to design an optimal monitoring network. Since at this stage, only initial estimates of source characteristics are available, the objective of designing a monitoring network is to capture maximum possible pollutant concentrations in all estimated scenarios of source release. Candidate monitoring locations were chosen over discretized areas of 100 m x 100 m, between the farthest estimated source location and the detection location. These locations are shown in Fig. 10. It is desired to choose 10 best monitoring locations.

Potential Monitoring Locations
In order to show the efficiency of this method, the source flux regeneration algorithm presented in Jha and Datta (2013) is implemented using the observation data collected over the next two-year period from:
-
1.
The optimal monitoring network, and
-
2.
Three different sets of arbitrary monitoring networks each containing 10 wells.
The well locations chosen for optimal and arbitrary monitoring networks are shown in Table 4. These results are compared after the first 5000 iterations of the optimization algorithm. Convergence profiles for each set of observation data, and the respective solutions achieved after 5000 iterations of adaptive simulated annealing algorithm, are shown in Fig. 11.

Estimated Release History
As seen from Fig. 11, the arbitrary monitoring networks do not achieve the same level of accuracy in regenerating source release magnitudes over time as the optimal monitoring network. From the convergence profile it may be also inferred that when using measurement data obtained from the optimal monitoring network, the optimization algorithm converge marginally faster compared to that while using the data obtained from an arbitrary network.
7 Conclusion
Performance evaluation of a new approach for initial source characteristics estimation and monitoring network design was presented in this study. It was applied to an illustrative study area comprising of a portion of a contaminated aquifer. Using the methodology developed, a subset of most significant monitoring locations were chosen. Source characterization results obtained using information from the designed monitoring network was compared with those obtained using information from arbitrary monitoring networks. The results show that estimation of source characteristics is more accurate with the concentration data obtained from the designed monitoring network. This validates the purpose of designing a dedicated monitoring network for efficient pollutant source identification. The proposed methodology also incorporates dynamic time warping distance as a measure for initially screening the potential source locations and determining activity initiation time for a source.
References
Aral MM, Guan J, Maslia ML (2001) Identification of contaminant source location and release history in aquifers. J Hydrol Eng 6(3):225–234
Atmadja J, Bagtzoglou AC (2001) State of the art report on mathematical methods for groundwater pollution source identification. Environ Forensic 2(3):205–214
Bagtzoglou A, Atmadja J (2005) Mathematical methods for hydrologic inversion: The case of pollution source identification. In: Kassim T (ed) Water pollution, The handbook of environmental chemistry, vol 3. Springer, Berlin, pp 65–96. doi:10.1007/b11442
Bagtzoglou AC, Tompson AFB, Dougherty DE (1991) Probabilistic simulation for reliable solute source identification in heterogeneous porous media. In: Ganoulis J (ed) Water resources engineering risk assessment. Springer-Verlag, Heidelberg, pp 189–201
Bagtzoglou AC, Dougherty DE, Tompson AFB (1992) Application of particle methods to reliable identification of groundwater pollution sources. Water Resour Manag 6:15–23. doi:10.1007/BF00872184
Chadalavada S, Datta B (2008) Dynamic optimal monitoring network design for transient transport of pollutants in groundwater aquifers. Water Resour Manag 22(6):651–670
Chadalavada S, Datta B, Naidu R (2011a) Optimisation approach for pollution source identification in groundwater: An overview. Int J Environ Waste Manag 8(1):40–61
Chadalavada S, Datta B, Naidu R (2011b) Uncertainty based optimal monitoring network design for a chlorinated hydrocarbon contaminated site. Environ Monit Assess 173:929–940. doi:10.1007/s10661-010-1435-2
Datta B (2002) Discussion of “identification of contaminant source location and release history in aquifers. In: Mustafa M, Aral Jiabao Guan, Morris L. Maslia (eds) Journal of hydrologic engineering, vol 7, pp 399–400
Datta B (1992) Optimal design of groundwater quality monitoring network incorporating uncertainties. In: Proceedings of the national symposium on environment, Bhabha atomic research center. Bombay, India, pp 129–131
Datta B, Chakrabarty D, Dhar A (2009a) Optimal dynamic monitoring network design and identification of unknown groundwater pollution sources. Water Resour Manag 23(10):2031–2049
Datta B, Chakrabarty D, Dhar A (2009b) Simultaneous identification of unknown groundwater pollution sources and estimation of aquifer parameters. J Hydrol 376(1–2):48–57
Datta B, Prakash O, Campbell S, Escalada G (2013) Efficient identification of unknown groundwater pollution sources using linked simulation-optimization incorporating monitoring location impact factor and frequency factor. Water Resour Manag 27(14):4959–4976
Datta BDC, Dhar A (2011) Identification of unknown groundwater pollution sources using classical optimization with linked simulation. J Hydro-Environ Res 1:25–36
Dhar A, Datta B (2010) Logic-based design of groundwater monitoring network for redundancy reduction. J Water Resour Plan Manag 13(1):88–94
Gorelick SM, Evans B, Remson I (1983) Identifying sources of groundwater pollution: an optimization approach. Water Resour Res 19(3):779–790
Jha M, Datta B (2013) Three-dimensional groundwater contamination source identification using adaptive simulated annealing. J Hydrol Eng 18(3):307–317. doi:10.1061/(ASCE)HE.1943-5584.0000624
Kollat JB, Reed PM, Maxwel RM (2011) Many-objective groundwater monitoring network design using bias-aware ensemble Kalman filtering, evolutionary optimization, and visual analytics. Water Resour Res 47(W02529). doi:10.1029/2010WR009194
Loaiciga H, Charbeneau R, Everett L, Fogg G, Hobbs B, Rouhani S (1992) Review of groundwater quality monitoring network design. J Hydraul Eng - ASCE 118(1):11–37
Mahar PS, Datta B (1997) Optimal monitoring network and ground-water-pollution source identification. J Water Resour Plan Manag 123(4):199–207
Mahar PS, Datta B (2000) Identification of pollution sources in transient groundwater systems. Water Resour Manag 14(3):209–227
Mahar PS, Datta B (2001) Optimal identification of ground-water pollution sources and parameter estimation. J Water Resour Plan Manag 127(1):20–29
Mahinthakumar GK, Sayeed M (2005) Hybrid genetic algorithm – local search methods for solving groundwater source identification inverse problems. J Water Resour Plan Manag 131:45
Michalak AM, Kitanidis PK (2004) Estimation of historical groundwater contaminant distribution using the adjoint state method applied to geostatistical inverse modeling. Water Resour. Manag. 40(8):W08, 302
Minsker B (2003) Long-term groundwater monitoring-the state of the art. American Society of Civil Engineers stock (40678)
Pinder G, Ross J, Dokou Z (2009) Optimal search strategy for the definition of a DNAPL source. Tech rep. Strategic Environmental Research and Development Program (SERDP, US Department of Defence
Rabiner L, Juang BH (1993) Fundamentals of speech recognition, vol 103. Prentice Hall
Singh RM, Datta B (2004) Groundwater pollution source identification and simultaneous parameter estimation using pattern matching by artificial neural network. Environ Forensic 5(3):143–153
Singh RM, Datta B (2006) Identification of groundwater pollution sources using GA-based linked simulation optimization model. J Hydrol Eng 11:101
Singh RM, Datta B (2007) Artificial neural network modeling for identification of unknown pollution sources in groundwater with partially missing concentration observation data. Water Resour Manag 21:557–572. doi:10.1007/s11269-006-9029-z
Singh RM, Datta B, Jain A (2004) Identification of unknown groundwater pollution sources using artificial neural networks. J Water Resour Plan Manag 130:506
Sun AY, Painter SL, Wittmeyer GW (2006a) A constrained robust least squares approach for contaminant release history identification. Water Resour Res 42(4)(W04):414
Sun AY, Painter SL, Wittmeyer GW (2006b) A robust approach for iterative contaminant source location and release history recovery. J Contam Hydrol 88(3-4):181–196
Sun NZ (1994) Inverse problems in groundwater modeling, pp 12–37
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Jha, M.K., Datta, B. Linked Simulation-Optimization based Dedicated Monitoring Network Design for Unknown Pollutant Source Identification using Dynamic Time Warping Distance. Water Resour Manage 28, 4161–4182 (2014). https://doi.org/10.1007/s11269-014-0737-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11269-014-0737-5