
Abstract
The spatial arrangement and vertical structure of vegetation in urban green spaces are key factors in determining the types of benefits that urban parks provide to people. This includes opportunities for recreation, spiritual fulfilment and biodiversity conservation. However, there has been little consideration of how the fine-scale spatial and vertical structure of vegetation is distributed in urban parks, primarily due to limitations in methods for doing so. We addressed this gap by developing a method using Light Detection and Ranging (LiDAR) data to map, at a fine resolution, tree cover, vegetation spatial arrangement, and vegetation vertical structure. We then applied this method to urban parks in Brisbane, Australia. We found that parks varied mainly in their amount of tree cover and its spatial arrangement, but also in vegetation vertical structure. Interestingly, the vertical structure of vegetation was largely independent of its cover and spatial arrangement. This suggests that vertical structure may be being managed independently to tree cover to provide different benefits across urban parks with different levels of tree cover. Finally, we were able to classify parks into three distinct classes that explicitly account for both the spatial and vertical structure of tree cover. Our approach for mapping the three-dimensional vegetation structure of urban green space provides a much more nuanced and functional description of urban parks than has previously been possible. Future research is now needed to quantify the relationships between vegetation structure and the actual benefits people derive from urban green space.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Urban green space can broadly be defined as the range of publicly and privately owned vegetation present in urban landscapes that is directly or indirectly available to city users (Atiqul Haq 2011). It is increasingly recognised that this green space provides benefits to human health and biodiversity, including opportunities for recreation (Bjerke et al. 2006; Van Leeuwen et al. 2010), habitat for biodiversity (Kong et al. 2010; Sandström et al. 2006) and temperature, flood and air quality regulation (Bolund and Hunhammar 1999; Van Leeuwen et al. 2010). Thus, there is a growing body of research attempting to measure urban green space and thereby quantify the provision of these benefits (Dobbs et al. 2013; Kendal et al. 2012). The majority of this work has been conducted at coarse spatial resolutions, measuring the extent and connectivity of city green space (Fuller and Gaston 2009). However, capturing fine resolution data on the structure of vegetation within urban green space, such as the presence of multiple vegetation layers and the spatial arrangement of trees within urban parks, is crucial for determining the types of benefits people receive from green space (Sadler et al. 2010; Voigt et al. 2014). Measuring fine scale vegetation structure has traditionally required field data collection techniques (e.g. Sandström et al. 2006) that are both time and resource consuming. Additionally, the ability to extrapolate this survey data across a city to inform urban green space planning is limited (Bradbury et al. 2005). One solution to this problem is to use high spatial resolution remotely sensed data such as Light Detection and Ranging (LiDAR) data to assess and map vegetation structure (Seavy et al. 2009; Zimble et al. 2003). However, these approaches have received little attention in the literature on urban green space to date.
The scale at which urban green space is studied often limits the type and detail of information that can be collected (Turner 1989). The vast majority of existing work focuses on the broad-scale characteristics of green space that can be quantified over large areas, for example, the amount of tree cover (Dobbs et al. 2013; Kendal et al. 2012; Shanahan et al. 2015). Therefore, we know little about green space characteristics at much finer scales, particularly in terms of vegetation structure, and how this is distributed across cities. One type of green space where fine scale vegetation structure is important is public parks that provide important recreation and nature opportunities within urban areas (Bjerke et al. 2006). In public parks, interactions between people and public green space cannot be understood solely on the basis of characteristics such as park location, size, or coarse measures of vegetation composition such as the amount of tree cover (Sadler et al. 2010). Rather, the benefits that people receive from parks, such as strengthened social cohesion (Maas et al. 2009) and connection to nature (Gobster and Westphal 2004) are experienced within each park where the fine-scale structure of vegetation is a crucial factor (Bjerke et al. 2006; Voigt et al. 2014). Therefore, capturing fine spatial resolution information on vegetation structure is important in understanding, quantifying and identifying the benefits that people receive from public parks.
Vegetation structure plays an important role in determining the mechanisms by which parks benefit people (Bjerke et al. 2006; Sadler et al. 2010). In particular, the spatial arrangement of vegetation (hereafter referred to as spatial structure) (Turner 1989) and its vertical complexity (hereafter referred to as vertical structure) (Zimble et al. 2003) affect the provision of benefits in different ways. The spatial structure of vegetation determines where vegetation is located within a park, which can influence the variety of different opportunities that the park provides (Bjerke et al. 2006; Fuller et al. 2007), potentially favouring one type of activity (e.g. bushwalking) or simultaneously supporting multiple activities (e.g. sporting activities, leisure and nature interactions). On the other hand, the vertical structure of vegetation has implications for biodiversity and some ecosystem services. Parks with a more complex (or multi-layered) vertical structure tend to support a higher abundance and diversity of both flora and fauna species (particularly avian species) (Goddard et al. 2010; Gordon et al. 2007). In turn, species-rich and heterogeneous habitats maintain healthier ecosystems (Tzoulas et al. 2007) and have a greater capacity to supply a range of services (Lu and Li 2003; Mitchell et al. 2015), including human-nature interactions (Luck et al. 2011) and improved psychological wellbeing (Fuller et al. 2007). The vertical structure of vegetation can also influence the perceived safety of a park and, as an extension, its attractiveness to be used by people (Gobster and Westphal 2004).
While previous studies of urban green space have not been able to capture and quantify vegetation structure at a fine resolution over large areas, recent advances in remote sensing technology have the potential to fill this gap (Davies and Asner 2014; Simonson et al. 2014). In particular, airborne LiDAR technology has proven useful in providing vertical vegetation profiles to characterise the structural complexity of natural landscapes (Miura and Jones 2010; Wing et al. 2012). LiDAR is an active remote sensing technology based primarily on near-infrared laser pulses fired from an airborne transmitter, whose position is precisely and accurately measured. Processing of the reflected LiDAR signal provides an accurate measure of distance between the transmitter and the surface features based on the time it takes for the pulse to travel back to the sensor (Vierling et al. 2008). When fired at a structurally complex surface (e.g. a vegetation canopy) the return signal can contain information about the presence and height of vegetation between the canopy and ground (Wing et al. 2012). Importantly, LiDAR data can be collected at high spatial resolution over large areas (1000s of km2) (Simonson et al. 2014) and the acquisition of LiDAR data is less restricted by accessibility, weather conditions and lighting requirements than other techniques such as field surveys and passive remote sensing approaches (Anderson et al. 2009). These characteristics make airborne LiDAR data an excellent tool for assessing citywide variation in green space vegetation distribution and spatial and vertical structure.
Despite the potential of LiDAR data to provide fine-scale information about the vertical structure of vegetation (Lefsky et al. 2002), including vegetation in urban green spaces, it has not yet widely used for this purpose. Instead, LiDAR analyses of urban vegetation have mainly focused on detecting, classifying, and mapping urban vegetation into discrete categories (Zhou and Troy 2008; Höfle et al. 2012; Han et al. 2014) rather than describing the vertical structure of urban vegetation. Exceptions include work in Vancouver, Canada, on the spatial structure of urban vegetation (tree crown area and canopy height) by combining high spatial resolution satellite images and LiDAR (Goodwin et al. 2009; Tooke et al. 2009), the calculation of vertical parameters of urban vegetation to estimate urban green volume in Shanghai, China (Huang et al. 2013), and the characterization of canopy height to explore riparian bird habitat associations in a mixed agricultural-urban landscape in northern California (Seavy et al. 2009). However, while these few studies do quantify some simple measures of urban vegetation vertical structure such as crown sizes and canopy heights, they do not quantify the entire vertical structure of vegetation or simultaneously consider both spatial and vertical structure for characterising urban green space. This is an important limitation given that patterns of spatial and vertical structure at fine resolutions are key drivers of the benefits of urban green space.
Here we use LiDAR data to provide one of the first quantifications of vertical and spatial vegetation structure in public green spaces across an entire city. More specifically, we used Brisbane, Australia as a case study and applied LiDAR data to characterise tree cover and vegetation spatial and vertical structure at a fine resolution within public parks. We then used these measures to quantify variation in vegetation characteristics among parks. We show that using LiDAR data is an effective method for quantifying variation in fine-scale complex features such as urban vegetation and that this can be used to quantify the characteristics of public parks. This approach provides a foundation for a more nuanced understanding of the benefits provided by urban green space, and the spatial distribution of those benefits, by linking them to the three-dimensional structure of urban vegetation.
Methods
Study area
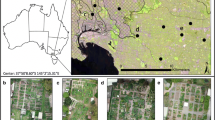
Our study area was the Brisbane Local Government Area (LGA), Queensland, Australia (Fig. 1). Brisbane is a sub-tropical city, spanning 1378 km2 of urban, peri-urban and agricultural land with a population of just over 1 million residents in 2013 (Australian Bureau of Statistics 2015). The city has experienced rapid population growth and urban development in the last decade and the provision of public green space is a key priority as the city expands (Brisbane City Council 2014). Currently, the city’s green space policy aims to promote improved nature-based opportunities for people through a larger, more connected and diverse green space network (Brisbane City Council 2014). Brisbane’s public park network (Fig. 1) cover an area of 148 km2 and range from local parks with playgrounds to large natural areas of regional and state significance (Brisbane City Council 2006).

Map of the Brisbane Local Government Area (LGA) showing public parks included in the analysis
Defining public parks
Using spatial data on the location of public parks in Brisbane provided by Brisbane City Council (BCC), we first selected the 3198 council-owned parks within the Brisbane LGA to represent urban public green space as they are a key provider of recreation and nature interactions (Bjerke et al. 2006). BCC uses a park classification system that reflects each park’s primary function and intended use to inform decisions regarding park management (Brisbane City Council 2006; Online Resources Table S1). This includes eight park categories: informal use, community use, landscape amenity, sport, corridor link, natural area, other parkland, and unclassified. Based on this classification, we removed sports parks (340 parks) and corridor link parks (726 parks) from the original dataset of council-owned parks to ensure that the study focused on parks with some capacity to provide an interaction with nature as well as other recreation activities. This resulted in the removal of 1066 parks from original dataset, representing 16.77 % of the total area of parks, with 2132 parks remaining for analysis.
Characterising tree cover, spatial structure and vertical structure
For each of the remaining 2132 parks, we mapped tree cover, vegetation spatial structure and vegetation vertical structure using discrete return airborne LiDAR data of the Brisbane LGA. We limited our analysis to vegetation in areas where there was vegetation >2 m in height (essentially treed areas) because we aimed to focus primarily on the vegetation structure of treed areas, consistent with the focus of other studies (Shanahan et al. 2014). Although areas of grass cover are also important for determining the value of green space, measures of the extent and spatial structure of tree cover essentially already correlate with grass cover because non-treed areas in most parks tend to be predominantly grass. Further, the vertical structure of grass was not quantifiable at the resolution that we were able to measure vertical structure. LiDAR data was collected with up to four returns per pulse by an ALTM Leica ALS50-II sensor in 2009. The laser pulse wavelength was 1064 nm with a repetition rate of 126 kHz, a mean point density of 2 points/m2 and a footprint of 0.34 m. The resulting discrete point cloud data in las format were converted into laz format using LAStools (http://rapidlasso.com/lastools/) for use in the study. The nominal vertical accuracy of the LiDAR data was ±0.15 m at 1 standard deviation and the measured vertical accuracy was ±0.05 m at 1 standard deviation (determined from check points located on open clear ground). The measured horizontal accuracy was ±0.31 m at 1 standard deviation.
Tree cover
To characterise tree cover, we calculated the mean foliage projective cover (FPC), proportion of tree cover and a plant area index (PAI) proxy for each park. FPC is a measure of tree cover expressed as the vertically projected percentage cover of photosynthetic foliage of all strata (Scarth et al. 2008). We used an over storey FPC layer provided by Brisbane City Council (2 m resolution; Table 1) that captures tree and shrub vegetation greater than 2 m in height and is derived from 2009 LiDAR data using the approach described in Armston et al. (2009). This approach combines LiDAR fractional cover estimates with ground measurements of overstorey FPC to model FPC based on LiDAR data. Additional manual editing to remove any areas misclassified as tree cover was applied to the raw FPC images by using WorldView-2 imagery from 2010 as the reference image and identifying non-treed or cleared areas (Table 1; Brisbane City Council, unpublished data). A mean FPC value was calculated for each park.
Tree cover was derived from the FPC layer (Table 1) by distinguishing areas where FPC was greater than zero and classifying these areas as having tree cover (2 m resolution; Brisbane City Council, unpublished data). We calculated the proportion of tree cover in each park as the area of tree cover within a park divided by the park’s total area.
Plant area index (PAI) measures the area of both green and woody plant material per unit area of ground surface (Morsdorf et al. 2006). We used a PAI proxy (PAIP) layer (5 m resolution; Table 1), derived from LiDAR data using the RSC LAS Tools code (https://code.google.com/p/rsclastools/) and replicating the methods from Morsdorf et al. (2006), to construct mean PAI proxy measurements for each park. This proxy is based on the linear relationship between the contact frequency of LiDAR pulses with vegetation and the distribution of first, single and last LiDAR returns, as well as the linear relationship between PAI and LiDAR pulse contact frequency. It should be noted that the PAIP layer is a proxy for PAI and therefore reflects relative instead of actual PAI values (Morsdorf et al. 2006).
Spatial structure
We calculated the ‘clumpiness’ metric (McGarigal et al. 2002) based on tree cover to characterise the spatial structure of vegetation in each park. We chose clumpiness because it measures the spatial aggregation of vegetation (i.e. how clumped or clustered it is) irrespective of vegetation abundance (McGarigal et al. 2002) and therefore accurately reflects the spatial aggregation of vegetation in a park independent of the size of the park or areal extent of vegetation in the park (Wang et al. 2014). The clumpiness index is defined as:
where g ii is the number of like adjacencies (joins) between treed pixels based on the double-count method, g ik is the number of adjacencies (joins) between treed and non-treed pixels based on the double-count method, min e i is the minimum perimeter (in number of cell surfaces) of treed areas for a maximally clumped class, and P i is the proportion of the landscape occupied by treed areas (McGarigal et al. 2002).
Clumpiness values range from −1 when vegetation is maximally disaggregated to 1 when vegetation is maximally aggregated (McGarigal et al. 2002) with values above 0 representing more aggregated vegetation and values below 0 more disaggregated. We calculated clumpiness for each park using FRAGSTATS version 4.2 (Table 1; McGarigal et al. 2002). Due to computational limits, we converted tree cover to a 5 m spatial resolution prior to this analysis. Parks that consisted of either 100 % or 0 % tree cover were removed from the analysis because clumpiness cannot be calculated in these cases. However, only 69 parks, representing 0.03 % of the total number of parks, were removed, leaving 2063 parks for subsequent analysis.
Vertical structure
To characterise vegetation vertical structure, we calculated the relative density of vegetation in different vertical strata using the LiDAR data. This provides information that mirrors information traditionally collected during ground-based surveys of vegetation that characterizes vertical structure, and follows methods for LiDAR data already used in forestry applications. LiDAR points (excluding ground points) were first clipped using the lasclip tool in LAStools to areas of tree cover. We then used the las2las tool to separate the data into five distinct vertical vegetation layers based on discrete height intervals, including very low (≥ 0.15 to <1 m), low (≥ 1 to <2 m), medium (≥ 2 to <5 m), high (≥ 5 to <10 m) and very high vegetation (≥ 10 m). All of the vertical vegetation layers had a 5 m spatial resolution. To obtain a measure of relative vegetation density within each vertical layer we calculated the ratio between the number of LiDAR returns within each vertical layer to the total number of returns from that layer and below based on modified methods from Miura and Jones (2010). In the methods used by Miura and Jones (2010), the number of returns was calculated for each vertical layer and then divided by the total number of returns in each raster cell. However, returns from lower vegetation layers can be blocked by higher vegetation, especially when vegetation is dense. To account for this effect, we modified Miura and Jones (2010) method by dividing the number of returns from each vertical layer by the total number of returns below the maximum height of the relevant vertical layer. We used the lasgrid tool in LAStools to calculate the number of LiDAR vegetation returns from each vertical layer and the total number of returns below the maximum height of the relevant vertical layer within each 5 m x 5 m raster cell. These values were used to calculate final ratio values in the ENVI 4.8 image processing software (Exelis Visual Information Solutions Inc.) with the Band Math tool using the equation:
where R i denotes the final ratio value for each vertical layer, \( {R}_{h_i} \) the vegetation returns between the minimum (h min ) and maximum (h max ) heights for each vertical layer, and \( {R}_{h_j} \) all of the vegetation returns below the maximum height (h max ) of each vertical layer. We then derived mean values of the five vegetation ratio layers for each park from the corresponding vertical strata.
To quantify total vegetation vertical complexity over all of the separate vertical strata, we calculated the foliage height diversity (FHD) for each raster cell. FHD is a diversity measure similar to the Shannon-Weiner Index that describes how evenly vegetation is distributed among vertical strata (MacArthur and MacArthur 1961). It is a dimensionless metric defined as \( FHD=-\sum_{i=1}^R{p}_i \ln {p}_i \), where p i is the proportion of total foliage from the ith vegetation layer. FHD values are high where vegetation is more evenly distributed across the vertical strata and low where vegetation is less evenly distributed. To calculate the mean foliage height diversity of each park, we first estimated the proportion of total foliage in each vegetation layer for each raster cell by dividing the ratio values for each stratum by the sum of all the ratio layers in each raster cell. We then added a value of 0.0001 to each proportion value to remove zeros and allow calculation of the natural logarithm. We then calculated a mean FHD value for all areas with tree cover in each park.
Finally, we created a canopy height data layer using the lasgrid tool in LAStools by calculating the above ground height of each LiDAR point and averaging this across all points that fell within each 5 × 5 m cell within areas of tree cover. We then calculated the mean canopy height for each park (Table 1).
Statistical analysis
We performed a principal component analysis (PCA), using the PCA function of the FactoMineR package (Lê et al. 2008) in R (v3.1.0) (R Development Core Team 2010), to describe how tree cover and vegetation structure metrics vary across parks in Brisbane. PCA has been successfully used to explore major gradients of environmental variation across a city (Davies et al. 2008). All tree cover and vegetation structure variables were scaled by their eigenvalues to account for differences in units. We then performed agglomerative hierarchical clustering analysis on the first two principal components to separate parks into distinctive clusters based on tree cover and vegetation spatial and vertical structure (Argüelles et al. 2014). Unlike K-means clustering, hierarchical agglomerative clustering does not require an a priori expectation of the optimal number of clusters and is less affected by differences in the initialization conditions of the clustering algorithm. The clustering procedure we used is based on the Ward’s criterion (Ward 1963), which calculates the sum of within-cluster inertia for each partition. The partition with the highest relative loss of inertia was chosen as the optimal cluster solution (Husson et al. 2010). Separating parks into clusters enabled us to draw comparisons between parks across Brisbane, based on similarities and differences in vegetation cover and structure.
Results
In total, 2063 parks were included in the analysis, covering over 12,300 ha and 9 % of the study area. Parks had a mean value of 54 % tree cover, with canopy height ranging from 2 to nearly 19 m (Table 2). The spatial distribution of tree cover was more aggregated than disaggregated, with a mean clumpiness value of 0.35 across all parks (Table 2). Foliage height diversity ranged from 0.004 to 1.4 across all parks with a mean value of 0.92 (Table 2), suggesting that the average park has fairly even vegetation vertical structure. In addition, there was more variation in understorey vegetation density than in the mid-storey and canopy (coefficient of variation 1.00 vs. 0.36; Table 2).
The first principal component (PC1) explained 34.95 % of the variation among parks and the second principal component (PC2) 26.95 %. PC1 was primarily positively correlated with FPC, tree cover, PAIP, canopy height and density of high and very high vegetation and negatively correlated with clumpiness (Fig. 2; Online Resources Table S2). One insight from this is that, as the proportion of tree cover within parks declines, the spatial distribution of tree cover became more aggregated (i.e., as tree cover declines clumpiness increases). PC2 was primarily positively correlated with FHD and the density of very low vegetation, low vegetation and medium vegetation and negatively correlated with PAIP, canopy height and the density of very high vegetation (Fig. 2). This suggests that, as vegetation vertical structure becomes more even, there is a higher abundance of under and mid storey vegetation, but that this largely independent of tree cover and the spatial structure variables that are associated with PC1.

Biplot of the first two PCA axes for all parks in Brisbane based on tree cover and vegetation spatial and vertical structure variables. Variables include clumpiness, foliage height diversity (FHD), foliage projective cover (FPC), canopy height, plant area index proxy (PAIP), proportion of tree cover, very high vegetation (≥ 10 m), high vegetation (≥ 5 to <10 m), medium vegetation (≥ 2 to <5 m), low vegetation (≥ 1 to <2 m) and very low vegetation (≥ 0.15 < 1 m). Parks are classified into three distinct clusters obtained by performing agglomerative hierarchical clustering analysis on the first two principal components. The arrows correspond to the vegetation cover and structure variables. The direction of the arrows shows the gradient direction of the variable in relation to the ordination axes. The length of the arrows represents how well the ordination axes approximate the values of the variables. The plot was scaled by eigenvalues to emphasize the relationship among variables
The optimal number of clusters identified was three (Fig. 3), although the clusters were not well separated on the PCA (Fig. 2). Cluster 1 parks were small in area (mean = 3.10 ha) with low tree cover (mean = 34 %) that is clumped (mean = 0.41) and the presence of a mid and understorey (Fig. 4). Cluster 2 parks were small (mean = 3.88 ha) with moderate tree cover (mean = 58 %) that is clumped (mean = 0.4), but lacking a mid and understorey (Fig. 4). Finally, cluster 3 parks were larger parks (mean = 14.92 ha) with high levels of tree cover (mean = 80 %) that is less clumped (mean = 0.16) and with mid and understorey vegetation (Fig. 4). More information on these differences between clusters can be found in the Online Materials (Figs. S5 & S6).

Dendrogram (a) and change in inertia (b) for different numbers of clusters from the hierarchical agglomerative clustering. The dendrogram a shows the hierarchical structure of the three optimal clusters with the y-axis representing the sum of within-cluster inertia at each partition. The change in inertia figure b shows the gain in within-cluster inertia present with different numbers of clusters. The suggested optimal number of clusters is that with the higher relative loss of inertia (e.g., (inertia(cluster n + 1)/inertia(cluster n))

Exemplar parks for each of the three clusters. a Cluster 1- open area containing some clumped tree cover with mid and understorey vegetation; b Cluster 2- open area containing some clumped tree cover with no mid or understorey vegetation; c Cluster 3- heavily treed area containing high levels of mid and understorey vegetation
Cluster 1 parks were the most common park type, representing 40.7 % of the total number of parks, but covering the least area (21.1 %; Online Resources Table S3). Cluster 2 parks were also common (37.6 % of the total number of parks) but these parks were also small and therefore only made up approximately 24.4 % of total park area. Cluster 3 parks were uncommon, representing 21.8 % of the total number of parks, but were large and covered the greatest area (54.5 %). Maps of the spatial distribution of the different park clusters can be found in the Online Materials (Figs. S1-S4). Cluster 1 and 2 parks were mainly Informal Use and Community Use parks, while Cluster 3 parks were mainly Natural Area parks (Online Resources Table S4). Landscape Amenity parks were evenly spread across all three clusters.
Discussion
Tree cover and the spatial and vertical structure of vegetation are key factors that determine the types and provision of benefits to people from urban green space (Lehmann et al. 2014; Van Herzele and Wiedemann 2003). Consequently, variation in tree cover and vegetation structure in green spaces across cities will in part determine access to different types of benefits. Existing methods for measuring vegetation structure have been largely limited to small-scale field samples (LaPaix and Freedman 2010; Sandström et al. 2006) and low-resolution remote sensing data (Davies et al. 2008; Kendal et al. 2012). Our approach provides a new way to characterise the structure of vegetation in urban parks and, importantly, to map this structure across entire cities. We also demonstrate that this approach can give clear insights into the relationships between vegetation structure attributes of urban parks. This is an important step for improving our ability to quantify the potential benefits of urban green space for people and how this varies across cities.
The approach that we present in this study employs LiDAR data, coupled with other remotely sensed and landscape ecology metrics, to allow the high resolution mapping of three-dimensional vegetation structure across an entire city. LiDAR technology has recently gained attention for its ability to collect high-resolution vegetation data over large spatial extents (Seavy et al. 2009; Simonson et al. 2014). In this study we have demonstrated that it is useful for quantifying the spatial distribution of green space tree cover and vegetation structure in urban landscapes. There is increasing demand for universal tools that can consistently compare urban green space within and between different cities and countries and our paper makes an important contribution to this (Kendal et al. 2012; Van Herzele and Wiedemann 2003). Other applications of the approach detailed here should be encouraged to advance our understanding of urban green space and the benefits it provides. For example, while this study focused specifically on local parks, there are other types of important and well-used green spaces that do not fall into this category (Barbosa et al. 2007). This includes private green spaces, such as residential backyards, that are an important source of nature experience and that provide critical, connected habitat for biodiversity within urban areas (Goddard et al. 2010).
Our quantification of fine scale vegetation structure sheds light on how urban green space tree cover and vegetation spatial and vertical structure in parks co-vary across a city. Interestingly we found that parks with low amounts of tree cover were the least fragmented (i.e., had the most clumped tree cover). This is in contrast to patterns at the scale of whole landscapes, where fragmentation generally increases as forest is lost (Fischer and Lindenmayer 2007; Kong and Nakagoshi 2005). The pattern of increased aggregation as tree cover is lost suggests that parks are being managed to spatially separate treed and open areas in parks with low tree cover. This segregation is analogous to a land-sparing (Lin and Fuller 2013; Phalan et al. 2011) approach to park management where areas are set aside for trees in separate locations to other land covers within parks. By separating parks into areas for different uses, parks will have a more clumped vegetation spatial structure and may support a wider variety of recreation activities (Bjerke et al. 2006) and target a wider range of users (McCormack et al. 2010). This could also provide benefits for biodiversity by minimising the fragmentation of available habitat within a park (Helzer and Jelinski 1999). However, while this is important for species operating at fine scales within parks, such as arthropods (Gibb and Hochuli 2002), it may be less important for species operating at larger landscape scales, such as birds (Culbert et al. 2013); although this depends on the size of the park (Threlfall et al. 2013).
Interestingly we found that vegetation vertical structure is largely independent of tree cover and spatial arrangement. This suggests that vertical structure is being managed independently of tree cover and spatial structure to provide specific benefits across a wide range of parks with different levels of tree cover. Characteristics of vertical structure have been highlighted as important predictors of park use (Bjerke et al. 2006; Holm 2000). For example, parks with multiple vertical layers of vegetation tend to provide more potential habitat niches and greater buffering of microclimatic conditions, which subsequently supports higher species diversity (Culbert et al. 2013) and abundance (Gibb and Hochuli 2002; Ruiz-Jaén and Aide 2005). This, in turn, enhances biodiversity and provides greater opportunities for nature interactions and activities such as wildlife watching (Bjerke et al. 2006) and relaxation (Gobster and Westphal 2004). On the other hand, parks that lack an under-storey and mid-storey will be more appropriate for activities such as sport (Bjerke et al. 2006) but provide fewer benefits in terms of nature interactions (Sandström et al. 2006; Threlfall et al. 2013).
Given the role of spatial and vertical structure of vegetation in providing different benefits to people, classifying parks based on these characteristics should provide a more functional description of the parks in a city. Despite the fact that the park clusters that we observed were not well separated, our classification of parks still provides a consistent and repeatable approach that should allow a more nuanced characterisation of parks, compared to more typical use-based park classification systems. In our Brisbane case study we found three somewhat distinct classes of parks, characterised by differences in tree cover and the spatial and vertical structure of vegetation. Two classes (classes 1 and 2) were characterised by parks with low to moderate tree cover and a clumped spatial structure that primarily included parks intended for informal recreation and community activities. Under Brisbane’s urban planning policy, these park types should be multipurpose and provide residents with a variety of park settings (Brisbane City Council 2006). Parks within classes 1 and 2 are regarded as very similar under BCC’s classification system; however, our data have shown that they can provide quite different functions. The relatively low vertical diversity of vegetation in class 2 parks suggests that they are more likely to include grassy areas with shade trees that facilitate sport or activity based recreation (LaPaix and Freedman 2010). In contrast, the presence of mid and understorey vegetation in class 1 parks provide more opportunities for nature-based recreation, such as bushwalking and bird-watching (Bjerke et al. 2006; Gobster and Westphal 2004).
The third class of park (class 3) was characterised by parks with high levels of disaggregated tree cover and the presence of mid storey and understorey vegetation. The majority of parks in this class were natural area parks, which are managed to protect and enhance areas of ecological and biodiversity value (Brisbane City Council 2006). The vegetation structure characteristics of the three park classes in Brisbane that we described at a fine-scale, reflect clear distinctions between parks that are managed predominately for human use compared to those managed for conservation (Cranz 1982; Cranz and Boland 2004). This highlights the trade-offs between managing urban parks for human benefit or biodiversity and that this is reflected clearly in park vegetation structure.
The method of mapping tree cover and vegetation spatial and vertical structure presented here provides a promising basis for investigating the vegetation structure and benefits provided by green space in cities. While vegetation spatial and vertical structure is thought to have strong implications for recreation and biodiversity (Bjerke et al. 2006; Fuller et al. 2007; Sandström et al. 2006), this study did not explicitly measure these park benefits. Given that most park users seek access to a diverse range of recreation experiences (Holm 2000), it is important that people within cities have access to a variety of different types of parks. Quantifying how the structure of vegetation in parks varies across a city can improve understanding of the different types of parks and recreation that urban residents have access to. An important next step will be to quantify benefits across parks by collecting field data about how people interact with different vegetation structures at a fine resolution and the benefits they receive from those interactions (Fuller et al. 2007; Sadler et al. 2010). These data could then be used to spatially map the multiple benefits of parks at high resolution by coupling models of use and benefits to the LiDAR derived vegetation structure measures. However, propensity to use parks and the benefits they provide can also depend strongly on socio-demographic factors such as motivation to engage in nature and recreation activities (Lin et al. 2014). Therefore, the integration of these socio-demographic factors will be an important component of future advances in mapping the benefits of urban green space (Shanahan et al. 2015).
Conclusions
The importance of urban green space and vegetation for people and biodiversity has been well documented (Sadler et al. 2010). However, scientific understanding has largely focused on the amount of green space within cities and not the finer-scale spatial and vertical structure of urban vegetation, despite the fact that this structure is a key factor influencing the provision of benefits (Bjerke et al. 2006; Fuller et al. 2007; Sandström et al. 2006). Our use of LiDAR data to characterise fine-scale vegetation structure in urban parks across an entire city helps to fill this gap and address the limitations of prior urban green space studies. We show that this approach can be used to gain a better understanding of the types and functions of parks present in cities – knowledge that has previously not been available at citywide scales. Our methods open up the possibility for exciting new areas of research for developing more functional representations of urban parks and mapping the benefits they provide at fine resolutions across cities.
References
Anderson BJ, Armsworth PR, Eigenbrod F, Thomas CD, Gillings S, Heinemeyer A, et al. (2009) Spatial covariance between biodiversity and other ecosystem service priorities. J Appl Ecol 46(4):888–896
Argüelles M, Benavides C, Fernández I (2014) A new approach to the identification of regional clusters: hierarchical clustering on principal components. Appl Econ 46(21):2511–2519
Armston JD, Danaher TJ, Scarth PF, Moffiet TN, Denham RJ (2009) Prediction and validation of foliage projective cover from Landsat-5 TM and Landsat-7 ETM+ imagery. J Appl Remote Sens 3(1):033540
Atiqul Haq SM (2011) Urban green spaces and an integrative approach to sustainable environment. J Environ Prot 2(5):601–608
Australian Bureau of Statistics. (2015). National Regional Profile: Brisbane from http://stat.abs.gov.au/itt/r.jsp?RegionSummary®ion=31000&dataset=ABS_REGIONAL_LGA&geoconcept=REGION&maplayerid=LGA2013&measure=ME
Barbosa O, Tratalos JA, Armsworth PR, Davies RG, Fuller RA, Johnson P, Gaston KJ (2007) Who benefits from access to green space? A case study from Sheffield, UK. Landsc Urban Plan 83(2):187–195
Bjerke T, Østdahl T, Thrane C, Strumse E (2006) Vegetation density of urban parks and perceived appropriateness for recreation. Urban For Urban Green 5(1):35–44
Bolund P, Hunhammar S (1999) Ecosystem services in urban areas. Ecol Econ 29(2):293–301
Bradbury RB, Hill RA, Mason DC, Hinsley SA, Wilson JD, Balzter H, et al. (2005) Modelling relationships between birds and vegetation structure using airborne LiDAR data: a review with case studies from agricultural and woodland environments. Ibis 147(3):443–452
Brisbane City Council. (2006). Park Classification System Guide. Brisbane
Brisbane City Council. (2014). Brisbane City Plan 2014. Brisbane.
Cranz G (1982) The politics of park design. A history of urban parks in America. MIT Press, Cambridge, Mass
Cranz G, Boland M (2004) Defining the sustainable park: a fifth model for urban parks. Landsc J 23(2):102–120
Culbert PD, Radeloff VC, Flather CH, Kellndorfer JM, Rittenhouse CD, Pidgeon AM (2013) The influence of vertical and horizontal habitat structure on nationwide patterns of avian biodiversity. Auk 130(4):656–665
Davies AB, Asner GP (2014) Advances in animal ecology from 3D-LiDAR ecosystem mapping. Trends Ecol Evol 29(12):681–691
Davies RG, Barbosa O, Fuller RA, Tratalos J, Burke N, Lewis D, et al. (2008) City-wide relationships between green spaces, urban land use and topography. Urban Ecosystems 11(3):269–287
Development Core Team R (2010) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria
Dobbs C, Kendal D, Nitschke C (2013) The effects of land tenure and land use on the urban forest structure and composition of Melbourne. Urban For Urban Green 12(4):417–425
Fischer J, Lindenmayer DB (2007) Landscape modification and habitat fragmentation: a synthesis. Glob Ecol Biogeogr 16(3):265–280
Fuller RA, Gaston KJ (2009) The scaling of green space coverage in European cities. Biol Lett 5(3):352–355
Fuller RA, Irvine KN, Devine-Wright P, Warren PH, Gaston KJ (2007) Psychological benefits of greenspace increase with biodiversity. Biol Lett 3(4):390–394
Gibb H, Hochuli DF (2002) Habitat fragmentation in an urban environment: large and small fragments support different arthropod assemblages. Biol Conserv 106(1):91–100
Gobster PH, Westphal LM (2004) The human dimensions of urban greenways: planning for recreation and related experiences. Landsc Urban Plan 68(2):147–165
Goddard MA, Dougill AJ, Benton TG (2010) Scaling up from gardens: biodiversity conservation in urban environments. Trends Ecol Evol 25(2):90–98
Goodwin NR, Coops NC, Tooke TR, Christen A, Voogt JA (2009) Characterizing urban surface cover and structure with airborne lidar technology. Can J Remote Sens 35(3):297–309
Gordon C, Manson R, Sundberg J, Cruz-Angón A (2007) Biodiversity, profitability, and vegetation structure in a Mexican coffee agroecosystem. Agric Ecosyst Environ 118(1):256–266
Han W, Zhao S, Feng X, Chen L (2014) Extraction of multilayer vegetation coverage using airborne LiDAR discrete points with intensity information in urban areas: a case study in Nanjing City, China. Int J Appl Earth Obs Geoinf 30:56–64
Helzer CJ, Jelinski DE (1999) The relative importance of patch area and perimeter-area ratio to grassland breeding birds. Ecol Appl 9(4):1448–1458
Höfle B, Hollaus M, Hagenauer J (2012) Urban vegetation detection using radiometrically calibrated small-footprint full-waveform airborne LiDAR data. ISPRS J Photogramm Remote Sens 67:134–147
Holm S (2000) Use and importance of urban parks. Forest & Landscape Research-Forskningscentret for Skov & Landskab 28:284
Huang Y, Zhou J, Hu C, Tan W, Hu Z, Wu J (2013) Toward automatic estimation of urban green volume using airborne LiDAR data and high resolution remote sensing images. Frontiers of Earth Science 7(1):43–54
Husson F, Josse J, Pages J (2010) Principal component methods-hierarchical clustering-partitional clustering: why would we need to choose for visualizing data. Agrocampus Quest. https://cran.rproject.org/web/packages/FactoMineR/vignettes/clustering.pdf.
Kendal D, Williams NSG, Williams KJH (2012) Drivers of diversity and tree cover in gardens, parks and streetscapes in an Australian city. Urban For Urban Green 11(3):257–265
Kong F, Nakagoshi N (2005) Changes of urban green spaces and their driving forces: a case study of Jinan city. China J Int Dev Cooperat 11:97–109
Kong F, Yin H, Nakagoshi N, Zong Y (2010) Urban green space network development for biodiversity conservation: identification based on graph theory and gravity modeling. Landsc Urban Plan 95(1):16–27
LaPaix R, Freedman B (2010) Vegetation structure and composition within urban parks of Halifax regional municipality, Nova Scotia, Canada. Landsc Urban Plan 98(2):124–135
Lê S, Josse J, Husson F (2008) FactoMineR: an R package for multivariate analysis. J Stat Softw 25(1):1–18
Lefsky MA, Cohen WB, Parker GG, Harding DJ (2002) Lidar remote sensing for ecosystem studies. Bioscience 51(1):19–30
Lehmann I, Mathey J, Rößler S, Bräuer A, Goldberg V (2014) Urban vegetation structure types as a methodological approach for identifying ecosystem services–application to the analysis of micro-climatic effects. Ecol Indic 42:58–72
Lin BB, Fuller RA (2013) FORUM: sharing or sparing? How should we grow the world's cities? J Appl Ecol 50(5):1161–1168
Lin BB, Fuller RA, Bush R, Gaston KJ, Shanahan DF (2014) Opportunity or orientation? Who uses urban parks and why. PLoS One 9(1):e87422
Lu F, Li Z (2003) A model of ecosystem health and its application. Ecol Model 170(1):55–59
Luck GW, Davidson P, Boxall D, Smallbone L (2011) Relations between urban bird and plant communities and human well-being and connection to nature. Conserv Biol 25(4):816–826
Maas J, Van Dillen SME, Verheij RA, Groenewegen PP (2009) Social contacts as a possible mechanism behind the relation between green space and health. Health & Place 15(2):586–595
MacArthur RH, MacArthur JW (1961) On bird species diversity. Ecology 42(3):594–598
McCormack GR, Rock M, Toohey AM, Hignell D (2010) Characteristics of urban parks associated with park use and physical activity: a review of qualitative research. Health & Place 16(4):712–726
McGarigal K, Cushman SA, Neel MC, Ene E (2002) FRAGSTATS: spatial pattern analysis program for categorical maps.
Mitchell MGE, Suarez-Castro AF, Martinez-Harms M, Maron M, McAlpine C, Gaston KJ, et al. (2015) Reframing landscape fragmentation's effects on ecosystem services. Trends Ecol Evol 30(4):190–198
Miura N, Jones SD (2010) Characterizing forest ecological structure using pulse types and heights of airborne laser scanning. Remote Sens Environ 114(5):1069–1076
Morsdorf F, Kötz B, Meier E, Itten KI, Allgöwer B (2006) Estimation of LAI and fractional cover from small footprint airborne laser scanning data based on gap fraction. Remote Sens Environ 104(1):50–61
Phalan B, Onial M, Balmford A, Green RE (2011) Reconciling food production and biodiversity conservation: land sharing and land sparing compared. Science 333(6047):1289–1291
Ruiz-Jaén MC, Aide TM (2005) Vegetation structure, species diversity, and ecosystem processes as measures of restoration success. For Ecol Manag 218(1):159–173
Sadler J, Bates A, Hale J, James P (2010) Bringing cities alive: the importance of urban green spaces for people and biodiversity. Urban ecology. Cambridge University Press, Cambridge, pp. 230–260
Sandström UG, Angelstam P, Mikusiński G (2006) Ecological diversity of birds in relation to the structure of urban green space. Landsc Urban Plan 77(1):39–53
Scarth P, Armston J, Danaher T (2008) On the relationship between crown cover, foliage projective cover and leaf area index. Paper presented at the 14th Australasian Remote Sensing and Photogrammetry Conference, Bartolo R., Edwards A., Spatial Sciences Institute, Australia.
Seavy NE, Viers JH, Wood JK (2009) Riparian bird response to vegetation structure: a multiscale analysis using LiDAR measurements of canopy height. Ecol Appl 19(7):1848–1857
Shanahan DF, Lin BB, Gaston KJ, Bush R, Fuller RA (2014) Socio-economic inequalities in access to nature on public and private lands: a case study from Brisbane, Australia. Landsc Urban Plan 130:14–23
Shanahan DF, Lin BB, Gaston KJ, Bush R, Fuller RA (2015) What is the role of trees and remnant vegetation in attracting people to urban parks? Landsc Ecol 30(1):153–165
Simonson WD, Allen HD, Coomes DA (2014) Applications of airborne lidar for the assessment of animal species diversity. Methods Ecol Evol 5(8):719–729
Threlfall CG, Law B, Banks PB (2013) Roost selection in suburban bushland by the urban sensitive bat Nyctophilus Gouldi. J Mammal 94(2):307–319
Tooke TR, Coops NC, Goodwin NR, Voogt JA (2009) Extracting urban vegetation characteristics using spectral mixture analysis and decision tree classifications. Remote Sens Environ 113:398–407
Turner MG (1989) Landscape ecology: the effect of pattern on process. Annu Rev Ecol Syst 20:171–197
Tzoulas K, Korpela K, Venn S, Yli-Pelkonen V, Kaźmierczak A, Niemela J, James P (2007) Promoting ecosystem and human health in urban areas using green infrastructure: a literature review. Landsc Urban Plan 81(3):167–178
Van Herzele A, Wiedemann T (2003) A monitoring tool for the provision of accessible and attractive urban green spaces. Landsc Urban Plan 63(2):109–126
Van Leeuwen E, Nijkamp P, de Noronha Vaz T (2010) The multifunctional use of urban greenspace. Int J Agric Sustain 8(1–2):20–25
Vierling KT, Vierling LA, Gould WA, Martinuzzi S, Clawges RM (2008) Lidar: shedding new light on habitat characterization and modeling. Front Ecol Environ 6(2):90–98
Voigt A, Kabisch N, Wurster D, Haase D, Breuste J (2014) Structural diversity: a multi-dimensional approach to assess recreational services in urban parks. Ambio 43(4):480–491
Wang X, Blanchet FG, Koper N (2014) Measuring habitat fragmentation: an evaluation of landscape pattern metrics. Methods in Ecology and Evolution 5(7): 634–646
Ward JH Jr (1963) Hierarchical grouping to optimize an objective function. J Am Stat Assoc 58(301):236–244
Wing BM, Ritchie MW, Boston K, Cohen WB, Gitelman A, Olsen MJ (2012) Prediction of understory vegetation cover with airborne lidar in an interior ponderosa pine forest. Remote Sens Environ 124:730–741
Zhou W, Troy A (2008) An object-oriented approach for analysing and characterizing urban landscape at the parcel level. Int J Remote Sens 29(11):3119–3135
Zimble DA, Evans DL, Carlson GC, Parker RC, Grado SC, Gerard PD (2003) Characterizing vertical forest structure using small-footprint airborne LiDAR. Remote Sens Environ 87(2):171–182
Acknowledgments
This research was supported by Australian Research Council Discovery Project DP130100218. We thank Brisbane City Council for assisting with and providing data sets, Danielle Shanahan for assisting with the parks data, and the Departments of Science, Information Technology and Innovation and Natural Resources and Mines for providing access to the airborne LiDAR data. The authors also thank three anonymous reviewers for comments that greatly improved the manuscript.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
ESM 1
(PDF 5.27 mb)
Rights and permissions
About this article

Cite this article
Caynes, R.J.C., Mitchell, M.G.E., Wu, D.S. et al. Using high-resolution LiDAR data to quantify the three-dimensional structure of vegetation in urban green space. Urban Ecosyst 19, 1749–1765 (2016). https://doi.org/10.1007/s11252-016-0571-z
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11252-016-0571-z