
Abstract
Human beings use certain styles when perceiving physical characteristics of objects with fingers. Sliding direction of finger contact is among the aforementioned styles. Thus, understanding the effect of sliding direction on tactile perception is essential. This study investigated the perception and identification of the roughness of sandpapers in two different sliding directions: proximal and distal. Furthermore, the corresponding tribological and dynamical properties of finger contact were examined using a custom setup. It was observed that the sliding direction and sliding speed influenced subjective judgment. The interaction between these two factors was also considered. A macroscopically continuous movement with a series of local collisions among the contact asperities enhanced the tactile perception in the proximal sliding. While in the distal direction, stick–slip occurred and interrupted the collision process, and reduced the tactile perception. The stick–slip phenomenon is modulated by various factors, including the external force and variations in the skin stiffness, which is influenced by the fingernail as well as the different friction properties in the two sliding directions.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The human skin is an important organ through which people communicate directly with the external environment. Tactile sensations, such as softness feelings [1], pain [2], stickiness [3], slipperiness [4], and spatial perception [5, 6], are sensed by the stimulation of the mechanoreceptors found in the skin. The compressive and tensile deformations of skin stimulate the tactile centre in the brain, inducing tactile sensation. Human beings often explore and perceive the characteristics of object surfaces by touching with their fingers. The motion of the fingers during tactile exploration results in friction in the finger-object interface [7,8,9]. Understanding and analysing the mechanisms of tactile perception and the relevance of skin friction has become important and has received significant attention [10,11,12], especially for practical applications, such as surface haptic displays [13, 14], artificial skin for robotics [15], design of cosmetic and medical products [16,17,18].
Several studies were devoted to investigating the relationship between tactile perception and skin tribology. A recent study found that people were able to distinguish similar, smooth materials with different surface chemistry, and that the friction coefficient was inversely related to pleasantness [19]. Our previous study investigated the effect of the sliding speed on tactile perception and showed that stick–slip occurred during low speed sliding and affected subjective judgment [20]. Numerical methods have also been applied to explore the relationship between perception and friction. A model finger was developed to simulate the dynamic forces felt during the tactile motion between a finger and a textured surface [21]. Tactile rendering of real and virtual textile surfaces was compared with regards to friction coefficient, vibrations, and brain activation using electroencephalography [22]. Tribological stimulation of the human fingertip was performed to discover relations between tactile friction, and the resulting brain dynamics. The result showed that the higher the friction the stronger and more localised the induced phase coherency [23].
Human beings use their own individual exploration styles when perceiving the physical characteristics of objects using their fingers; these include variations in moving directions, sliding speeds and contact loads as well as different fingers and types of touching. Figure 1 shows various motions, such as sliding, pinching, stretching and turning, that can be utilised to touch and perceive. Humans consciously and unconsciously change the motion characteristics of their fingers during touch. An example is sliding direction, which is usually different and seemingly random during tactile perception. Gee et al. [24] observed minor differences in the friction coefficient between finger sliding in the radial and ulnar directions against a steel comparator block. Han et al. [25] observed a larger friction coefficient in the proximal direction than in the distal direction, for finger orientation angles of 30° and 60°. Zhang et al. [26] revealed that the friction coefficient in proximal sliding was larger than in distal sliding for a range of roughness and normal forces. Nakazawa et al. [27] measured different stiffness values depending on the direction of the stimulation, with stiffer skin in the proximal–distal compared to the radial–ulnar direction. Similarly, Delhaye et al. [28, 29] investigated the surface strain and contact area of the finger in four different sliding directions and found a higher compliance of the skin in the proximal direction. Abdouni et al. [30, 31] found a superior tactile perception for the finger sliding in the ulnar direction due to the anisotropy of the mechanical properties of the finger skin. Peyre et al. [32] developed an instrumented artificial finger showing good correlation with the human finger in terms of the friction coefficient and perception of the sliding direction. These studies have predominantly explored the effect of the sliding direction from a tribological and mechanical point of view. However, how the sliding direction induces tactile perception should be further investigated. Complex contact conditions emerge when a finger touches the object surface. It is important to investigate the effects of the sliding direction on the tactile perception from a tribological perspective.

Different moving directions during finger exploration, in the proximal direction, the finger slides toward the human body, whereas in the distal direction it moves away
Our previous findings showed that most participants could better identify two sandpapers at a higher speed than at a lower speed [20]. This could be explained by the frequent occurrence of stick–slip behaviour on the skin at lower velocity sliding. Correspondingly, varied sliding directions could also affect the occurrence of stick–slip; due to stiffness differences [28], stick–slip might occur more frequently in the distal sliding than in the proximal. Consequently, the sliding direction could influence the subjective judgment of perceiving the texture of sandpapers.
The present study is aimed at establishing a qualitative and quantitative correlation between perception, friction and dynamics, revealing how the sliding direction and sliding speed of fingers affect the tactile perception. Two basic types of sliding directions are discussed in this work: proximal (towards the human body) and distal (away from the body), as shown in Fig. 1. Accordingly, a 2 × 2 × 3 (sliding direction × sliding speed × trials) repeated measures design was used to investigate the effect of sliding speed and direction on the tactile perception. The hypothesis was that the participants would more easily identify sandpapers in the proximal direction than in the distal direction and that the sliding speed affects the sensitivity to the sliding direction.
In this study, the mechanical behaviour of finger contacts was investigated to explore the relationship between tactile perception and finger friction. The perception experiment was performed by asking participants to identify the roughness of two sandpapers using the right index finger in two sliding directions and at two sliding speeds. Subsequently, six participants took part in the tribological experiment; their tribological and dynamical properties were recorded, in an experiment simulating the friction process that occurred in the perception experiment.
2 Perception Experiment
2.1 Participants
Thirty-two participants aged between 22 and 33 years were recruited. They were right-handed postgraduate students from Southwest Jiaotong University, in Chengdu, China. To reduce any perception differences related to gender, the participants were all male. All participants volunteered and signed a statement “I voluntarily participate in the current scientific experiment and I currently have no physical problems and have had no mental disorders within the last 6 months”. All measurements were performed in situ and were noninvasive. The study procedure was approved by the University Ethics Committee.
2.2 Materials and Procedure
Sandpapers were chosen as the tactile stimuli because of their different grit size and roughness scale, which could produce differences in perception [33,34,35]. Three types of sandpaper made of silicon carbide were used in this study, and two of them were found to produce a clear perception difference [20]. The three sandpapers were denoted as #400, #600 and #800 mesh numbers (SKY Lark, purchased from Jiangxi Inyang Sandpaper Ltd., China); an increased mesh number indicates a finer size particle on the surface of the sandpaper. The sandpaper samples were cut into pieces of 40 mm × 50 mm and were disposed after a single trial. #400 sandpaper was used before the experimental trials to familiarise the participants with the experimental procedure. #600 and #800 sandpapers were used in the experiment (Fig. 2) as the rough and smooth specimens, respectively, with the 3D topographies of the surfaces available in our previous study [20]. The surface of roughness (Sa) was selected to assess the physical topography of sandpaper, with 9.0 μm for #600 and 5.2 μm for #800.

Schematic of finger-sandpaper contact with different sliding directions and optical images of sandpapers
Figure 2 shows the process of the finger sliding during the perception test. Two common sliding directions that humans use were selected for this study: the proximal and distal direction. Two nominal sliding speeds of 20 and 50 mm/s were chosen. These values are within the range of the scanning speed that is normally employed by people judging a surface [36,37,38]. In this study, the effects of the sliding direction on the tactile perception were investigated, expanding on our previous study.
Participants were asked to clean the finger with alcohol before each perception test and start the experiment when the finger had dried. Then, they slid their index finger across one of the sandpapers over a distance of 50 mm in either 1 s or 2.5 s, corresponding to the two sliding speeds, under a moderate loading force. Aktar et al. [39] defined that the range of moderate touch was between 0.8 and 2.2 N. The angle between the finger and sample was nominally 25°, measured using a protractor. The participants familiarised themselves with the different motion conditions prior to commencing the experimental programme. Four experimental conditions were included:
-
(1)
Finger sliding in the proximal direction at a lower speed (nominally 20 mm/s).
-
(2)
Finger sliding in the distal direction at a lower speed.
-
(3)
Finger sliding in the proximal direction at a higher speed (nominally 50 mm/s).
-
(4)
Finger sliding in the distal direction at a higher speed.
All tests were conducted at the same ambient temperature of 25 °C and a relative humidity between 60 and 70%.
Participants were blindfolded and asked to perceive the roughness of the two types of sandpapers (#600 and #800) and identify the rougher sandpaper under the four experimental conditions. The procedure consisted of two sessions with different sliding speeds. A break lasting 10 min was taken between the two sessions. In each session, all trials were conducted in Latin-Square Counterbalance, meaning the participants were divided into four groups, for which the order of proximal and distal direction and the roughness of the presented sandpaper were varied. The identification trial was repeated three times in each experimental condition according to the experimental design. A correctly identified result was only considered as valid if the participant was able to correctly identify the rougher sandpaper without being uncertain or guessing. All the data in the perception test were statistically analysed by using SPSS version 19.0 with the significance set as 0.05.
2.3 Results
Figure 3 shows a profile of the distributions of the recognition ratio for each experimental condition. The recognition ratios were calculated by dividing correct answers by all experiments performed. The error bars shown in the results represent the standard error of the data. The recognition ratios were 86.46% and 55.21% in the proximal and distal direction at the lower speed and 85.42% and 70.83% in both directions at the higher speed, respectively.

Results of perception experiment (Recognition ratios were calculated by dividing correct answers by all experiments performed)
A 2 × 2 × 3 (sliding direction × sliding speed × trials) repeated measures ANOVA showed there was neither a significant main effect of the trials nor were there relevant interactions (ps > 0.05). In addition this revealed a main effect of the sliding direction (F(1,31) = 24.20, p < 0.001, η2p = 0.44), and the sliding speed effect was marginally significant (F(1,31) = 3.97, p = 0.055, η2p = 0.11) as well. Importantly, it revealed a significant interaction of sliding direction and sliding speed, F(1,31) = 4.28, p = 0.047, η2p = 0.12. Simple main effect analysis showed that the proximal direction showed significantly higher recognition ratios than in the distal direction for both the lower and the higher speed (p < 0.001, p = 0.028, respectively). The higher speed showed significantly higher scores than the lower speed in the distal direction (p = 0.017), but not the proximal direction (p = 0.823).
Some key observations were summarised as follows, in relation to our hypotheses:
-
(1)
Sliding direction significantly affected the subjective judgment on tactile perception.
-
(2)
Sliding direction and sliding speed interacted with each other on the tactile perception. Sliding direction influenced significantly at both sliding speeds while the sliding speed markedly affected the results obtained for sliding in the distal direction.
3 Tribological Experiment
To enable relating the results of the perception experiments to the underlying mechanics of the finger-sandpaper contact, a set of tribological experiments was performed, assessing the friction behaviour involved in the touch perception experiment described above.
3.1 Participants and Materials
Six participants among the volunteers who performed the perception test were randomly selected to perform the tribological experiment. The sandpapers of #600 and #800 were again used in the experiments.
3.2 Experimental Device
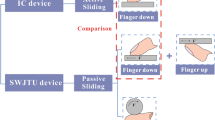
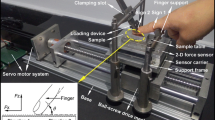
The tribological test was conducted using a custom setup, which allowed the finger to slide in the proximal and distal directions against a counter surface. The device allows both ‘finger down’ and ‘finger up’ configurations to assess friction and contact area, respectively, as shown in Fig. 4. The setup comprised five main parts: the driving part, controlling the movement of a slider, the loading device including a force sensor, regulated by a lifting device, a finger and an arm holder with an angle sensor adjusting the position, a camera used in the ‘finger up’ test and the data acquisition system. The contact force applied on the finger by the slider was measured by a 3D force sensor with a measurement range of 0–100 N and a resolution of 5 mN. The vibrations during finger sliding were evaluated by an accelerometer connected to the fingernail, with a measurement range of 5 g. The slider driven by a servo motor enabled sliding motion in two directions. The camera with a frame rate of 815 s−1 and a resolution of 640 × 480 pixels was used to record the contact area of the finger. In the ‘finger up’ tests, the sandpaper specimens were replaced by glass samples to enable visualisation using the camera. The measured force and vibration signals were recorded using a data acquisition system (Jiangsu Donghua Testing Technology Ltd., China) with a sampling frequency of 2 kHz.

Schematic diagram of the experimental setup, showing the driving part, the loading device, the finger and arm holder, the camera and the data acquisition system
3.3 Procedure
To simulate the friction process that occurred in the perception experiment, the experimental variables in the case of the ‘finger down’ setup were set consistently with the perception test. The sliding speeds of the slider were set as 20 mm/s and 50 mm/s. In the tribological tests the specimen moves against the stationary finger, whilst in the perception tests the finger was sliding against a stationary surface. Therefore, proximal sliding in these tests corresponds with the sample table sliding in the distal direction. The contact angle between the finger and the sample table was measured as 25 ± 1°. The normal load of contact system was set as 2 ± 0.1 N, within the range of normal loads in the perception test. The deformed contact areas in the two sliding directions were observed in the ‘finger up’ experiment, where the sliding speed in the two directions was reduced to 5 mm/s to facilitate analysis of the stick–slip phenomenon. Participants were asked to clean the finger with alcohol before each test to reduce the influence of grease and moisture on the finger. All tribological tests were carried on in the same ambient environment of 25 °C and 60–70% RH.
3.4 Results
Figure 5a shows the contact force of one participant during finger sliding in the proximal direction at the lower sliding speed. The dotted orange box indicates the steady-state sliding region, with an average normal force, indicated by the purple line, of 2 ± 0.1 N and with no significant fluctuation. The resulting friction force is shown by the green line. Figure 5b shows the average friction coefficients for the six participants, in the steady-state sliding region under different conditions of movement, such as sliding direction on #600 and #800 sandpaper at 20 mm/s and 50 mm/s, respectively. The error bars shown in the results represent the standard error from six participants. The obtained friction coefficients in the finger-sandpaper contact were high, with values close to 2. In particular, the friction coefficients measured in the proximal direction were similar to those in the distal direction.

a Normal and friction force measured in the proximal direction at the lower speed against #600 sandpaper, indicating the steady-state region b Average friction coefficient measured in the proximal and distal direction under different conditions of movement, the error bars indicate the standard deviation between participants
A more detailed analysis of the friction forces and vibration acceleration signals was performed, revealing differences between distal and proximal sliding as well as the sliding speed. For all six participants we obtained the same trends and behaviour, in the following section we will illustrate these in more detail for one participant. It should be noted that the conclusions are based on the results for all six participants.
Figure 6 compares the friction force extracted during stable sliding, for the low speed tests this corresponds to a period of 1.5 s, whilst for the high speed test this corresponds to 0.6 s. The friction signals in the proximal direction (plotted in purple line) were relatively smooth, indicating a continuous movement. The friction forces in the distal direction (plotted in blue line) fluctuated greatly, compared with the proximal direction under all four movement conditions. In the distal direction, at the lower speed, significant stick–slip occurred, whilst at the higher speed large fluctuations were observed, but without a characteristic stick–slip pattern.

The friction force measured on finger-sandpaper contact in different directions under different cases: a #600 sandpaper + 20 mm/s b #600 sandpaper + 50 mm/s c #800 sandpaper + 20 mm/s d #800 sandpaper + 50 mm/s
To further analyse the difference between the two directions, the dynamic characteristics were investigated. Figure 7 displays the vibration acceleration signals and the relevant time–frequency analysis. The magnitude of the vibration signals was found to visibly increase for distal sliding: the signals fluctuated significantly at the lower speed compared to the higher speed. The vibration magnitudes measured in the proximal direction were at a lower level and there was no obvious magnitude difference when increasing the sliding speed. A spectral analysis of the measured vibration acceleration signals under various conditions was performed through a time–frequency analysis (Fig. 7). All measured frequencies were between 0 and 1000 Hz, corresponding to the range of frequencies to which of the mechanoreceptors are sensitive [40]. For sliding in the proximal direction, the spectrum of vibration signals was more uniformly distributed over time and exhibited reduced energy values. Sliding in the distal direction at the lower speed showed a local concentration of the main frequency and a much higher energy value, reflecting the instability of the finger-sandpaper contact and the occurrence of stick–slip. For the distal sliding at the higher speed, the dominant vibrations of this participant were characterised by a fundamental frequency of 55 Hz and its accompanying harmonics. The observed fundamental frequencies and frequency distributions were similar for sliding against #600 and #800 sandpaper.

The vibration acceleration signals and corresponding time–frequency analysis measured on finger-sandpaper contact in different directions under different cases: a #600 sandpaper + 20 mm/s b #600 sandpaper + 50 mm/s c #800 sandpaper + 20 mm/s d #800 sandpaper + 50 mm/s. Note the different scales in the y-direction of the graphs
The contact areas between the finger and the glass sample were observed using the ‘finger up’ configuration, to assess the deformation of the skin surface in contact. The index finger was pressed against the moving glass surface, showing changes of the fingerprint. The fingerprint consists of three-dimensional arcs on the epidermis of the finger. Changes to the fingerprint as the result of sliding motion for both sliding directions were captured using the camera, as shown in Fig. 8. For sliding in the proximal direction, the fingerprints were stretched along the fingertip, whilst they were squeezed into the centre of the contact area for sliding in the distal direction. More detailed information on the observed differences between fingerprints in two sliding directions can be found in a previous study [26].

Contact area during the finger sliding in the proximal (a) and distal direction (b)
Figure 9 shows the change of the fingerprint during sliding in the distal direction. These were related to fluctuations of the friction force in three successive instants, as illustrated in Fig. 9a. In the images, the contour of the contact area is indicated by a black line, whilst the analysis of the deformation is done within a smaller zone, the ‘target area’, within the contact, as shown in Fig. 9b. The target area was selected to include only four fingerprint lines, enabling a clear illustration of the typical local deformation and stretch behaviour seen in the skin of the finger. Whilst there may be minor quantitative differences between the various parts of the contact area, the video in the supplementary materials accompanying this paper clearly shows that stretching and contraction between adjacent fingerprint ridges can be observed throughout the contact area. In the target area, the fingerprint lines are depicted in different colours (purple for t1, blue for t2, orange for t3) in order to clearly contrast the changes of the fingerprint between two successive instants. Comparing the fingerprint in the target area at t2 and t1, see Fig. 9c, shows that the fingerprint lines lagged behind and subsequently recovered at t3. This caused a fluctuation of the friction force, indicating the occurrence of stick–slip in the contact.

a Fluctuated friction force and normal force measured during the sliding on the glass surface in the distal direction. b Optical images of finger contact area caught by the camera in t1, t2, and t3 instant of the finger sliding. c Variation of depicted fingerprints in target areas in t1–t2 and t2–t3 instants
4 Discussion
4.1 Perception Results Combined with Tribological Properties
The perception experiment was performed to investigate the impact of the sliding direction on tactile perception. A higher recognition ratio was observed in the proximal direction at the two sliding speeds utilised in this study. The differences in recognition ratio between the lower and the higher speed were more significant in the distal direction than in the proximal direction. The statistical analysis showed that both sliding direction and sliding speed played important roles in tactile perception; and a finger moving in the proximal direction helped participants better identify the various sandpapers. The interaction between both variables also affected the subjective judgment.
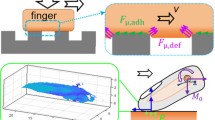
A finger sliding in the proximal direction, shows a smooth friction force without obvious oscillations, indicating a continuous sliding motion at both 20 mm/s and 50 mm/s. A continuous motion between finger and sandpaper starts a series of local collisions between fingerprint and sandpaper asperities, resulting in a relatively uniform spectrum of vibration acceleration signals (Fig. 7). This process is similar to the hammering model for brake noise generation [41]: “hammering” may be initiated when the finger slides along the “hills and valleys” on the surface of the sandpaper. The finger skin is constantly impacted by asperities stimulating the mechanoreceptors in the skin, leading to enhance tactile perception. Changing the sliding speeds from 20 to 50 mm/s had no obvious effect on the proximal motion because of the relatively high values of velocity and resulting high frequency of hammering. Accordingly, the recognition ratio was higher in the proximal direction at both sliding speeds.
With regards to the finger sliding in the distal direction, stick–slip behaviour occurred frequently, as shown in the tribological results (Fig. 6). This stick–slip behaviour is characterised by significant fluctuations of the frictional force and results in intermittent sliding motion when the static friction coefficient is higher than the dynamic friction coefficient [42, 43]. Stick–slip was clearly recognisable in the distal direction at the lower sliding speed. Stick–slip causes intermitted motion, thus halting the continuous collisions of the sandpaper asperities and the skin, meaning the mechanoreceptors are not continuously stimulated by a broad spectrum of frequencies. At the same time, the energy values of the spectrum are increased at a single frequency (Fig. 7). The combination of these two phenomena distracts the participants from correctly identifying the different sandpapers. Therefore, the recognition ratio was lower in the distal direction. The difference in recognition ratios between the lower and higher speeds might be attributable to stick–slip behaviour more commonly occurring at the lower speed, thus affecting the subjective judgment. This would result in a lower recognition ratio than the result at the higher speed [20].
In addition, fingerprints also contribute to the perception of fine textures, defined as spatial periods below about 200 μm [44]. Prevost et al. [45] found that this perception is mediated by the rapid skin vibrations elicited when the finger slides over the surface. The presence of fingerprints spatially modulates this vibration and facilitates the processing of Pacinian corpuscles. This is also important for texture-induced friction force modulations [46, 47]. Figure 8 shows the stretching and squeezing deformation of fingerprints in two sliding directions. Different deformation might have different effects on tactile perception, friction and dynamics.
4.2 Stick–Slip Phenomenon During Finger Sliding
Asymmetric tribological behaviour was observed for the different sliding directions. Stick–slip occurred frequently in the distal direction and its variation is modulated by skin properties and parameters of the contact system such as the skin stiffness [48], skin hydration [49, 50], and the roughness of the contact material [51]. Several factors influencing the frictional asymmetricity will be discussed below:
Human fingers comprise bone, nail and soft tissue. Figure 10 shows a schematic representation of the anatomical structure of the finger, including the distal phalanx, the interphalangeal joint, and the middle phalanx. The motion of fingers is constrained by the joints. The interphalangeal joint allows the finger to flex inward and restrains it bending in the outward direction. The direction of the total external force (F1 or F2) comprising the frictional force (f1 and f2) and the normal force (N) is depicted schematically during the finger sliding. F1 is exerted on the finger in the direction restricted by the joint and thus the sliding movement is relatively stable. In contrast, F2 in the free direction is easy to flex and move the finger intermittently; this might cause the frequent occurrence of stick–slip during the distal sliding motion.

Schematic diagram of anatomical finger structure in the proximal direction (a) and in the distal direction (b)
The finger stiffness was found to be anisotropic with finger posture because of the effect of interphalangeal joints and the contraction of antagonistic muscles [52]. The nail affects the skin stiffness when the finger is pressed onto the surface of objects. The friction properties in the two sliding directions display a difference due to the change of the shear strength [25]. A lower stiffness of the skin in the distal direction relative to the proximal case was described in [28]. Experimental results show a relatively high frequency of stick–slip behaviour in the distal sliding motion. This could be regulated by the differences of the skin stiffness between the two moving directions.
5 Limitations
There are some limitations to this study. Firstly, the effect of the sliding direction on the mechanoreceptors was not examined. Secondly, only a specific group of participants (male postgraduate students) were included in this study. Gender differences and other affecting factors, such as profession, should be considered in future studies. Thirdly, the perception test was conducted using sandpaper samples, and the effects of different materials and roughness should be further explored. Additionally, in this study the finger skin was cleaned before the experiment using an alcohol wipe. Whilst this is normal practice in tactile studies, the application of alcohol also influences the skin physiochemical properties and thus may affect the tribological behaviour and the occurrence of stick–slip. The exact effects of the presence or removal of contaminants such as sweat and sebum on the stick–slip behaviour of skin need further investigation. Additionally, the stick–slip phenomenon was visualised using a finger-glass contact. This enabled a comparison with the observations made for the finger-sandpaper contact. The surface textures of the glass and sandpaper surfaces are clearly different and the differences of the stick–slip phenomena between these two surfaces should be considered in the next step. These considerations will be important to fully understand the underlying mechanisms involved in tactile perception and finger friction.
6 Conclusions
Perception and friction experiments in a finger contact were conducted to investigate the effect of sliding direction. The following conclusions can be made:
-
(1)
Sliding direction significantly affected the subjective judgment of tactile perception. The participants performed better in the proximal direction condition. Sliding speed moderated this directional effect. Specifically, participants performed equally well along the proximal direction at high and low speeds. In contrast, in the distal direction the performance at high speed was superior.
-
(2)
A macroscopically continuous movement enhances tactile perception in the proximal sliding. It is thought that this relates to the continuous occurrence of local collisions of roughness asperities and the fingerprint ridges.
-
(3)
In the distal direction, stick–slip occurs, interrupting the continuous collision process, and thus reducing tactile perception. The stick–slip phenomenon is modulated by various factors, including the external force and variations in the skin stiffness, which is influenced by the fingernail as well as the different friction properties in the two sliding directions.
References
Kitada, R., Doizaki, R., Kwon, J., Tanigawa, T., Nakagawa, E., Kochiyama, T., et al.: Brain networks underlying tactile softness perception: a functional magnetic resonance imaging study. Neuroimage 197, 156–166 (2019)
Hoskin, R., Berzuini, C., Acosta-Kane, D., El-Deredy, W., Guo, H., Talmi, D.: Sensitivity to pain expectations: a Bayesian model of individual differences. Cognition 182, 127–139 (2019)
Maggie, K.-P., Chau, K.-H., Kan, C.-W., Fan, J.-T.: Magnitude estimation approach for assessing stickiness sensation perceived in wet fabrics. Fibers Polym. 19, 2418–2430 (2018)
Barrea, A., Delhaye, B.P., Lefevre, P., Thonnard, J.L.: Perception of partial slips under tangential loading of the fingertip. Sci. Rep. 8, 7032 (2018)
Fardo, F., Beck, B., Cheng, T., Haggard, P.: A mechanism for spatial perception on human skin. Cognition 178, 236–243 (2018)
Romano, D., Marini, F., Maravita, A.: Standard body-space relationships: fingers hold spatial information. Cognition 165, 105–112 (2017)
Van Der Heide, E., Zeng, X., Masen, M.A.: Skin tribology: science friction? Friction 1, 130–142 (2013)
Jin, Z., Dowson, D.: Bio-friction. Friction 1, 100–113 (2013)
Masen, M.A.: A systems based experimental approach to tactile friction. J. Mech. Behav. Biomed. Mater. 4, 1620–1626 (2011)
Zhou, X., Mo, J.L., Jin, Z.M.: Overview of finger friction and tactile perception. Biosurf. Biotribol. 4, 99–111 (2018)
Nonomura, Y., Miura, T., Miyashita, T., Asao, Y., Shirado, H., Makino, Y., et al.: How to identify water from thickener aqueous solutions by touch. J. R. Soc. Interface 9, 1216–1223 (2012)
Zhang, S., Zeng, X., Matthews, D.T.A., Igartua, A., Rodriguez-Vidal, E., Contreras Fortes, J., et al.: Finger pad friction and tactile perception of laser treated, stamped and cold rolled micro-structured stainless steel sheet surfaces. Friction 5, 207–218 (2017)
Ayyildiz, M., Scaraggi, M., Sirin, O., Basdogan, C., Persson, B.N.J.: Contact mechanics between the human finger and a touchscreen under electroadhesion. Proc. Natl. Acad. Sci. USA 115, 12668–12673 (2018)
Park, J., Son, B., Han, I., Lee, W.: Effect of cutaneous feedback on the perception of virtual object weight during manipulation. Sci. Rep. 10, 1357 (2020)
Wang, X., Dong, L., Zhang, H., Yu, R., Pan, C., Wang, Z.L.: Recent progress in electronic skin. Adv. Sci. (Weinh) 2, 1500169 (2015)
Asanuma, N., Aita, Y., Nonomura, Y.: Tactile texture of cosmetic sponges and their friction behavior under accelerated movement. J. Oleo Sci. 67, 1117–1122 (2018)
Carré, M.J., Tan, S.K., Mylon, P.T., Lewis, R.: Influence of medical gloves on fingerpad friction and feel. Wear 376–377, 324–328 (2017)
Derler, S., Rotaru, G.M., Ke, W., El Issawi-Frischknecht, L., Kellenberger, P., Scheel-Sailer, A., et al.: Microscopic contact area and friction between medical textiles and skin. J. Mech. Behav. Biomed. Mater. 38, 114–125 (2014)
Skedung, L., Harris, K., Collier, E.S., Arvidsson, M., Wäckerlin, A., Haag, W., et al.: Feeling smooth: psychotribological probing of molecular composition. Tribol. Lett. (2018). https://doi.org/10.1007/s11249-018-1077-z
Zhou, X., Mo, J.L., Li, Y.Y., Xu, J.Y., Zhang, X., Cai, S., et al.: Correlation between tactile perception and tribological and dynamical properties for human finger under different sliding speeds. Tribol. Int. 123, 286–295 (2018)
Khojasteh, B., Janko, M., Visell, Y.: Complexity, rate, and scale in sliding friction dynamics between a finger and textured surface. Sci. Rep. 8, 13710 (2018)
Camillieri, B., Bueno, M.-A., Fabre, M., Juan, B., Lemaire-Semail, B., Mouchnino, L.: From finger friction and induced vibrations to brain activation: tactile comparison between real and virtual textile fabrics. Tribol. Int. 126, 283–296 (2018)
Ozgun, N., Bennewitz, R., Strauss, D.J.: Friction in passive tactile perception induces phase coherency in late somatosensory single trial sequences. IEEE Trans. Neural Syst. Rehabil. Eng. 27, 129–138 (2019)
Gee, M.G., Tomlins, P., Calver, A., Darling, R.H., Rides, M.: A new friction measurement system for the frictional component of touch. Wear 259, 1437–1442 (2005)
Han, H.Y., Shimada, A., Kawamura, S.: Analysis of friction on human fingers and design of artificial fingers. Proc. IEEE Int. Conf. Rob. Autom. 4, 3061–3066 (1996)
Zhang, M., Mo, J.L., Xu, J.Y., Zhang, X., Wang, D.W., Zhou, Z.R.: The effect of changing fingerprinting directions on finger friction. Tribol. Lett. 65, 60 (2017)
Nakazawa, N., Ikeura, R., Inooka, H.: Characteristics of human fingertips in the shearing direction. Biol. Cybern. 82, 207–214 (2000)
Delhaye, B., Lefevre, P., Thonnard, J.L.: Dynamics of fingertip contact during the onset of tangential slip. J. R. Soc. Interface 11, 20140698 (2014)
Delhaye, B., Barrea, A., Edin, B.B., Lefevre, P., Thonnard, J.L.: Surface strain measurements of fingertip skin under shearing. J. R. Soc. Interface 13, 20150874 (2016)
Abdouni, A., Vargiolu, R., Zahouani, H.: Impact of finger biophysical properties on touch gestures and tactile perception: aging and gender effects. Sci. Rep. 8, 12605 (2018)
Abdouni, A., Moreau, G., Vargiolu, R., Zahouani, H.: Static and active tactile perception and touch anisotropy: aging and gender effect. Sci. Rep. 8, 14240 (2018)
Peyre, K., Tourlonias, M., Bueno, M.-A., Spano, F., Rossi, R.M.: Tactile perception of textile surfaces from an artificial finger instrumented by a polymeric optical fibre. Tribol. Int. 130, 155–169 (2019)
Tanaka, Y., Bergmann Tiest, W.M., Kappers, A.M., Sano, A.: Contact force and scanning velocity during active roughness perception. PLoS ONE 9, e93363 (2014)
Mylon, P.T., Buckley-Johnstone, L., Lewis, R., Carré, M.J., Martin, N.: Factors influencing the perception of roughness in manual exploration: do medical gloves reduce cutaneous sensibility? Proc. Inst. Mech. Eng. J. 229, 273–284 (2014)
Miyaoka, T., Mano, T., Ohka, M.: Mechanisms of fine-surface-texture discrimination in human tactile sensation. J. Acoust. Soc. Am. 105, 2485–2492 (1999)
Fagiani, R., Massi, F., Chatelet, E., Berthiera, Y.: Dynamic analysis of surface scanning for tactile perception. In: ASME 2010 10th Biennial Conference on Engineering Systems Design and Analysis, pp. 365–373. American Society of Mechanical Engineers Digital Collection, Place American Society of Mechanical Engineers Digital Collection (2010)
Barnes, C.J., Childs, T.H.C., Henson, B., Southee, C.H.: Surface finish and touch—a case study in a new human factors tribology. Wear 257, 740–750 (2004)
Yoshioka, T., Bensmaia, S.J., Craig, J.C., Hsiao, S.S.: Texture perception through direct and indirect touch: an analysis of perceptual space for tactile textures in two modes of exploration. Somatosens. Mot. Res. 24, 53–70 (2007)
Aktar, T., Chen, J., Ettelaie, R., Holmes, M., Henson, B.: Human roughness perception and possible factors effecting roughness sensation. J. Texture Stud. 48, 181–192 (2017)
Kandel, E., Schwartz, J.: Principles of Neural Science, 5th edn. China Machine Press, Beijing (2013)
Rhee, S.K., Tsang, P.H.S., Wang, Y.S.: Friciton-induced noise and vibration of disc brakes. Wear 133, 39–45 (1989)
Berman, A.D., Ducker, W.A., Israelachvili, J.N.: Origin and characterization of different stick−slip friction mechanisms. Langmuir 12, 4559–4563 (1996)
Derler, S., Rotaru, G.M.: Stick–slip phenomena in the friction of human skin. Wear 301, 324–329 (2013)
Hollins, M., Bensmaïa, S.J.: The coding of roughness. Can. J. Exp. Psychol. 61, 184–195 (2007)
Scheibert, J., Leurent, S., Prevost, A., Debrégeas, G.: The role of fingerprints in the coding of tactile information probed with a biomimetic sensor. Science 323, 1503–1506 (2009)
Wandersman, E., Candelier, R., Debrégeas, G., Prevost, A.: Texture-induced modulations of friction force: the fingerprint effect. Phys. Rev. Lett. 107, 164301 (2011)
Prevost, A., Scheibert, J., Debregeas, G.: Effect of fingerprints orientation on skin vibrations during tactile exploration of textured surfaces. Commun. Integr. Biol. 2, 422–424 (2009)
Babu, D., Konyo, M., Nagano, H., Tadokoro, S.: Introducing whole finger effects in surface haptics: an extended stick-slip model incorporating finger stiffness. IEEE Trans. Haptics 11, 417–430 (2018)
Adams, M.J., Briscoe, B.J., Johnson, S.A.: Friction and lubrication of human skin. Tribol. Lett. 26, 239–253 (2007)
Nonomura, Y., Fujii, T., Arashi, Y., Miura, T., Maeno, T., Tashiro, K., et al.: Tactile impression and friction of water on human skin. Colloids Surf. B 69, 264–267 (2009)
Dinç, O.S., Ettles, C.M., Calabrese, S.J.: Some parameters affecting tactile friction. J. Tribol. 113, 282–288 (1991)
Milner, T.E., Franklin, D.W.: Characterization of multijoint finger stiffness: dependence on finger posture and force direction. IEEE Trans. Biomed. Eng. 45, 1363–1375 (1998)
Acknowledgements
The authors are grateful for the financial support of the National Natural Science Foundation of China (No. 31300861) and the China Scholarship Council (No. 201907000020).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zhou, X., Mo, J.L., Li, Y.Y. et al. Effect of Finger Sliding Direction on Tactile Perception, Friction and Dynamics. Tribol Lett 68, 85 (2020). https://doi.org/10.1007/s11249-020-01325-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11249-020-01325-6