
Abstract
This paper describes an experimental setup that allows the observations of the stress distribution under soft elastohydrodynamic lubrication (EHL) in line contact by means of photoelasticity. This experimental method is rarely used in the EHL field. The photoelastic fringe patterns in the circular polarization are collected under different rolling speeds and loads. Numerical calculations are carried out to analyze the oil film thickness, pressure, and shear stress distribution. Compared with those results, numerical and experimental stress distribution are basically consistent. Some beneficial conclusions are obtained. These are helpful to investigate further the oil pressure distribution and directly observe the stress distribution under lubrication conditions through experiment method.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The elastohydrodynamic lubrication (EHL) is one of the important topics in tribology, which widely exists in many mechanical elements such as gears, rolling bearings, even in biological joints. In recent decades, the mechanism of EHL contact is increasingly well understood [1–3]. The critical machine components operate in the EHL regime, where a thin lubricant film could be formed under high contact pressure, and the pressure causes elastic deformation of the contact surface. The elements are separated by those lubricant films. Therefore, these components experience lesser wear and damage even at higher applied load.
Recently, with the growth and application of polymeric materials, the machine components made from those are widely used in the industry, since they are easy manufactured, low cost, and reliably transmits at light load. Since polymeric material has low elastic moduli compared to metals, the components mostly operate in the soft EHL. Many researchers have a great interest on the behaviour of soft EHL. Bohan et al. [4] explored EHL in soft contacts though through numerical method. They focused on the film thickness and pressure distribution influenced by sliding and non-Newtonian fluid behaviour. Vicente et al. [5] mainly focused on the friction in rolling-sliding soft-EHL contact using a mini-traction machine (MTM). Then they built up a numerical solution of the point contact for this problem. Dearn et al. [6] examined the different forms of EHL and determined, which category involute polymer gears fall under. The effects of lubrication on the operating efficiencies of high-performance polymer gears and tooth geometry were interpreted. Those researches mainly use numerical approaches to analyze soft-EHL problems. Bongaerts et al. [7] developed a confocal Raman spectroscopy method to measure lubricant film thickness within compliant contacts. This system boasts the advantage of revealing lubricant composition within the contact and can be used to study emulsions and opaque lubricants, e.g. shampoos. Recently, Gasni et al. [8] adapted ultrasonic reflection techniques to measure film thickness in rubber bearing contacts. The advantage of this system is that it is not limited to transparent materials and so has the potential to be employed on real engineering components. Myant's research group [9, 10] employed laser induced fluorescence (LIF) to measure lubricant film thickness in a compliant point contact during transient motion. Two types of transient sliding motion were investigated: start-up and sudden halting. LIF achieves rapid data acquisition, instantaneous contact maps, and can be used with a wide range of lubricants. The LIF technique has proven to be effective for measuring and mapping film thickness in soft-EHL. Gohar and Cameron [11, 12] firstly measured the lubrication film thickness distribution in point EHL contact by optical interferometry. The optical interferometry has been a very useful technique to measure the film thickness [13, 14]. Some studies has have successfully used optical interferometry to measure lubricant film thickness in soft-EHL conditions [15–17].
Since some of polymeric have the advantage of stress-induced birefringence, such as epoxy resin and polycarbonate. Those materials could be applied to study the stress distribution of models in the photoelastic experiment. Photoelasticity is a full field experimental optical technique to determine the stress condition, which gives the principal stress difference (isochromatics) and its orientation (isoclinics) in the model domain [18–20]. Dally and Chen [21] established the photoelastic technique to measure frictional contact forces at asperities. They were able to recover the individual loads at the asperities from the far field fringes. Burguete and Patterson [22] studied a cylinder in contact with half-space using stress freezing. They demonstrated the control of inter-facial friction achieved by the photoelastic stress freezing. Foust et al. [23] used photoelasticity to measure boundary tractions at a bolted joint. The individual stress components were determined considering friction at the interface by formulating the problem in the form of a series of Airy stress function. Peter et al. [24] analyzed the contact stresses between the teeth of a gear by means of reflection photoelasticity. All those are in the static condition. Klemz et al. [25] used the photoelasticity method to guess an EHL pressure distribution in 1971. Since then, there is rarely report using photoelastic method to investigate EHL problem.
In an attempt to obtain the stress distribution under soft EHL experiment system, this paper proposed the photoelastic technology to illustrate the soft EHL combining with numerical simulation. The experimental equipment was built up based on the photoelastic method. Photoelastic fringe pattern images in a dark-field circular polariscope were captured in soft-EHL under the different rolling speeds and applied loads. The numerical solution of those problems has been obtained for comparison with experimental results. This shows reasonably close agreement with the obtained by photoelasticity.
2 Theory
2.1 Generalised Pressure Equation
A lubricant separates the cylinder with high elastic modulus with the elastic flat with low elastic modulus when the cylinder is rolling. The model problem could be viewed as a rigid cylinder of radius R is rolling with a velocity u s contacted with smooth elastic flat under a constant load. The general Reynolds equation can be represented a one-dimensional form, provided that the analysis plane is some distance from the roller edge. The development of pressure in the lubricated contact region can be written as:
where \(\rho\), \(\eta\), and p denote the density, viscosity, and pressure, respectively.
The boundary condition is expressed as below:
-
1.
p = 0 at the entrance of the oil film;
-
2.
p = dp/dx = 0 at the export region.
2.2 Lubricant Viscosity and Density Equations
The viscosity of the lubrication is assumed to be the function of pressure only. The relationship between viscosity and pressure is given by Roelands can be expressed as:
where \(\eta_{0}\) is the viscosity of lubricant under ambient condition, \(p_{0}\) is the pressure–viscosity coefficient of lubricant.
The variation in the density of the lubricant with pressure is defined by the Dowson–Higginson’s relationship as:
where \(\rho_{0}\) is the viscosity of fluid under ambient condition.
2.3 Elasticity Equation
The film thickness (h) is the given by the original gap geometry and the elastic deformation, which can be obtained by:
where h 0 is the initial film thickness, R is the radius of cylinder. de(x) is the total elastic deformation of contacting surfaces, which can be solved by integrating the pressure as follows:
2.4 Load Balance Equation
The total load acting on the contact has to be balanced by the hydrodynamic load. Thus, the load balance equation is given by
There are some different numerical schemes to calculate the pressure and film distributions of this problem. In this paper, a finite difference discretization was employed in the calculation. The Reynolds, film thickness, and load equation were discretized in the x direction. First, it was assumed that the pressure distribution was Hertz pressure of line contact to solve the Reynolds equation. Then we can obtain the new pressure distribution. After this, the film thickness was modified to satisfy the normal applied load with the integrated pressure distribution. Second, the new film thickness was taken into the next iteration repeatedly. Iterations are repeated until pressure distributions stabilize and the load is balanced. The convergence on pressure is reached when the maximal relative difference between two consecutive iterations is smaller than 1 × 10−5 (Fig. 1).

Geometry of soft EHL of line contacts under pure squeeze motion
2.5 Stress Analysis
After the oil pressure is calculated, the pressure load is acts on a surface. The stress field in the subsurface can be obtained by using the classical potential theory [26] as written as:
These stresses can be obtained by applying Flamant solution as follows:
where \(S\) and \(T\) are the influence coefficient tensors corresponding to the normal and tangential loadings, respectively, the more detail can be found in Ref. [27].
Using Eq. (8) the subsurface normal stresses and shear at any point in at any point in a soft EHD lubrication contact can be obtained. The principal stresses are employed to obtain the maximum shear stress in the subsurface. The maximum shear stresses are given by;
3 Experiment Method and Materials
3.1 The Photoelasticity Method
The photoelasticity method is based on a unique property of some isotropic transparent materials. The materials are birefringent, that is, when a model made from a photoelastic material is stressed, it refracts light differently with different light wave velocity depending on the state of stress in the model. The stress optic law is given as:
where \(\delta\) is the phase difference, \(\lambda\) is the wavelength of light, D is the thickness of a specimen, \(c\) is a material constant,\((\sigma_{1} - \sigma_{2} )\) is the principal stress difference.
When a birefringent specimen is placed in a circular polariscope and loaded, photoelastic fringes appear. The arrangement of optical elements in a circular polariscope is setup is shown in Fig. 2. The polarizer, first quarter waveplate, second quarter waveplate, and the analyzer subtend angles to the reference axis x are \(\pi /2\), \(\pi /4\), \(3\pi /4\) , and 0 respectively. With the Jones calculus for the arrangement of circular polariscope, the light intensity at that situation is expressed below:
where I a is the light intensity accounting for the amplitude of light. I b is the light intensity of background.

The arrangement of circular polariscope
From the Eq. 11 we can see, there is only the parameters of item phase difference. When \(\delta = 2\pi N(N = 0,1,2 \ldots )\), the light intensity I = 0, the point is dark spots. The dark line called the isochromatic, and the principal stress difference can be expressed as
where \(f_{\sigma } = \lambda /c\) is the material fringe value, N is the fringe order number.
There are various techniques proposed to get values of the photoelastic fringe pattern, such as phase-stepping and RGB photoelasticity. More detailed information of those techniques can be found in references in [19, 28]. In this paper, we proposed the correlation of the intensity method to determine the fringe order at the point of the maximum shear stress. First, the point approximately determines the fringe order value in the region [N, N + 1] N = 0, 1, 2, 3…; then, it is accurate to obtain the value of fringe order at the point using a minimized error function defined as:\(e_{i} = |I - I_{i} |\), where I is the intensity of the point where the fringe order has been determined, I i is the intensity of table for which the fringe order is known. Therefore, the maximum shear stress is determined using Eqs. 9 and 12, since the value of fringe order is determined.
3.2 Experimental Setup
A line EHL contact is formed between the cylinder and smooth flat specimen. Figure 3 illustrates the schematic configuration of the experimental setup for digital photoelasticity technology. The experimental setup includes an optical system and a mechanical part. The optical system consists of a light source, a polarizer, two quarter-wave plats, an analyzer, a camera with a resolution of 1024 × 780, an image card, and a computer. During the experiment, the total magnification of the system is 1.5x. The pixel space of the CCD camera is Cx = Cy = 1/150 mm/pixel in the horizontal and vertical directions. The light source is monochromatic light with 587 nm wavelength.

a Schematic representation of photoelasticity for the soft EHL system and b contact part of the experimental apparatus
In the mechanical part, as shown in Fig. 3b, the servomotor is controlled by computer through a motor driver. The cylinder roller is driven by a through synchronous belt drive. Most of the cylinder is immersed in oil lubricant. The upper region of specimen is fixed by a clamp loaded by dead weights so that it keeps a constant load during the test. When the cylinder covered with oil lubricant is loaded and is rolling against the specimen, EHL can be generated between the steel cylinder and a transparent specimen.
3.3 Materials and Test
Transparent epoxy resin material was used to make a specimen in the test. A resin and curing agent composition (3:1 wt%) was used to create an epoxy solid. The mixture was stirred with a stirring rod for at least 5 min, then placed into a centrifuge to remove the bubbles. Then, the mixture was poured into glass molds with a release agent. After curing and demolding, the specimens were milled to dimensions of 80 mm × 50 mm × 4 mm (length × width × thickness). Oil lubricant adhered to the front and back surfaces of the specimen when the cylinder was rolling so that light did not transmit through the specimen. An isochromatic fringe pattern was not obtained. Thus, PET film was placed under the surface of specimen as shown in Fig. 4.

The specimen in detail
In the experiment test, the material fringe value \(f_{\sigma }\) is one of most parameters to evaluate the stress different. Further, the photoelastic fringe value \(f_{\sigma }\) cannot be reliably taken from the literature. Four-point bending was applied to determine the material fringe value. A sample made of the same material is a rectangular beam with dimensions of 130 mm in length, 24 mm in width, and 4 mm thickness. It was subjected to a pure bending load of F = 150 N as shown in Fig. 5. Based on the equation
where M is the bending moment, \(\Delta y\) is the vertical distance between two points selected along the symmetry y-axis and \(\Delta N\) the absolute fringe-order difference between these points. Therefore, the material fringe value \(f_{\sigma } = 15.06\) N/(mm fringe).

Calibration sample loaded in four point bending and observed in dark-field circular polariscope (the right region of beam)
The cylinder was made of steel and had a diameter of 40 mm. The mechanical parameters were measured by material testing machine and are given in Table 1. The oil lubricant used was Mobil 1000. The viscosity and density of was about 0.183 Pa s and 825 kg/m3 at 25 °C and at atmospheric pressure, which was measured by a rheometer (HAAK RheoWin Mars40). The pressure–viscosity coefficient of the oil is about 0.916 GPa.
The experiment tests were conducted to study the effects of velocity and load on soft EHL. The effect of velocity on the soft EHL were done for rolling speeds from 500 to 1500 r/min and a load of 12.5 N/mm that gives a Hertzian pressure of 22.43 MPa. For the other part, the effect of loads on the soft EHL were carried out with different loads of w = 15, 20, and 25 N/mm under rolling speeds of 500 r/min. All tests were carried out under nominally pure rolling at a temperature of 25 °C.
4 Results and Discussion
4.1 Effect of the Rolling Speed
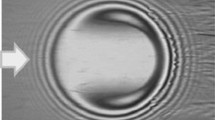
Figure 5 shows the isochromatic fringe patterns under the different rotational speeds: (a) static contact; (b) n = 500 r/min; (c) n = 1000 r/min; (d) n = 1500 r/min. In Fig. 6a, the shear stress distribution subsurface was symmetrical and the maximum fringe order is under the contact surface in the static contact, which is the same as the predicted Hertz line contact. Once the cylinder was operating with different rotational speeds, it appears that the stress fields under the contacting surface appear to be not symmetric about y-axis. The maximum shear stresses tended to appear on the contact surface. These were mainly due to the presence of the lubricant. The numerical calculation could verify the results as follow section. Reader can view these multimedia files in supplementary materials online.

Isochromatic fringe patterns under different rotational speeds. a Static contact; b n = 500 r/min; c n = 1000 r/min; d n = 1500 r/min
Numerical simulations were carried out to prove the validity of the model and to study the effect of various parameters on the lubrication characteristics. Based on the experiment condition, in EHL contact, the entrainment velocity is U along the x axis. The external load per unit length applied on cylinder was set to be W = 12.5 kN/m. The Hertzian pressure P H = 22.44 MPa, and the Hertzian radius b = 0.3547 mm for a stationary elastic half-space homogeneous contact. The numerical region is set in −3b ≤ x ≤ 3b with 129 units grids.
The effects of various rotational speeds on the film thickness and pressure are shown in Fig. 7. It can be seen that the minimum film thickness increases substantially as the velocity increases (from 1.214 μm at n = 500 r/min to 2.417 μm at n = 1500 r/min), while maximum pressure changes slowly. Because the elastic modulus of the plane is low (soft tissue), there is no pressure spike like the classical EHL.

Effect of rotational speed on pressure and film thickness profiles
Figure 8 shows maximum shear stress contour on the x–y plane. It shows that due to the presence of the lubricant, the stress fields under the subsurface appear to be not symmetric and deflect toward the outlet. The maximum pressure appears to contact the surface, which is similar to the results of photoelasticity. Using the proposed method, the maximum shear stress under different rotational speeds of experimental and numerical results are shown in Table 2. It notes that the numerical results are shade larger to the photoelasticity, but they are all decreasing as the rotational speed increases.

The maximum shear stress distributions under different rotational speeds. a Static contact; b n = 500 r/min; c n = 1000 r/min; d n = 1500 r/min
4.2 Effect of Load
In this section, the load effect on the soft EHL was investigated. Figure 9 shows the isochromatic fringe patterns under different loads of w = 15, 20, and 25 N/mm under static and rolling speed n = 500 r/min, respectively. It can be observed from Fig. 9 that the shear stress distribution subsurface was symmetrical and the maximum fringe order is under the contact surface in the static contacts. The isochromatic fringe increases with the increasing load. Once the cylinder was operating under constant rotational speed, it appears that the stress fields under the contacting surface appear to be not symmetric about the y-axis and the maximum shear stresses tended to appear on the contact surface due to the presence of the lubricant. The numerical calculation verifies the results as follows.

Isochromatic fringe patterns with different loads under the static and rotational condition. a w = 15 N/mm under static contact; b w = 15 N/mm under n = 500 r/min; c w = 20 N/mm under static contact; d w = 20 N/mm under n = 500 r/min; e w = 25 N/mm static contact; f w = 25 N/mm under n = 500 r/min
Numerical simulations were also carried out to analyze the effect of load on the soft EHL. Figure 10 shows the effect of applied load on the pressure and film thickness under the experimental conditions. It is apparent that the film pressure and contact area increase significantly as the applied load increases from 15 to 25 N/mm. The peak pressure increases from 23.78 MPa at w = 15 N/mm to 31.21 MPa at w = 25 N/mm, but the film thickness decreases slowly with an increase in load.

Effect of applied load on pressure and film thickness profiles
Figure 11 shows maximum shear stress contour on the x–y plane. It is observed that the stress fields under subsurface appear to be not symmetric and deflect toward to the outlet compared with the static condition, since the cylinder is rolling caused the contact pressure of the lubricant. With the load increased, the maximum pressure increases and appears to contact surface, which is similar to the results of photoelasticity. The maximum shear stress under different loads of experimental and numerical results is shown in Table 3. The numerical and experimental results are generally consistent, but they are all decreasing under rotation compared with the static contact. This is mainly because the contact pressure distribution is wider due to lubricant motion effects.

The maximum shear stress distributions under different rotational speeds the static and rotational condition. a w = 15 N/mm under static contact; b w = 15 N/mm under n = 500 r/min; c w = 20 N/mm under static contact; d w = 20 N/mm under n = 500 r/min; e w = 25 N/mm static contact; f w = 25 N/mm under n = 500 r/min
5 Conclusions
In this study, numerical calculation was carried out to analyze experimental observations of the stress distribution under soft EHL in line contact using the photoelasticity. The photoelastic fringe patterns were collected under the different rotational speed. Using the numerical approach, the oil thickness and pressure and shear stress distribution were calculated based on the experimental conditions. The most notable conclusions can be summarized by comparing with the numerical and experiment results as follows.
-
1.
An apparatus for experimental evaluation on stress distribution under rolling contact with lubrication was developed. The apparatus could get a steady operation to analyse the lubrication contact.
-
2.
From the experimental analysis, lubrication is great influence on the subsurface stress distribution. Compared with static contact, the maximum shear stress is closer to the contact surface and moves toward the exit zone as the speed gradually increases.
-
3.
Through the numerical approach, because the elastic modulus of the plane is low (soft tissue) in the soft EHL, there is no pressure spike as in the classical EHL. The effect of rotational speeds and applied load is significant on the film thickness and pressure. The stress distribution of the numerical simulation is similar to the experimental results.
-
4.
This analysis method in this paper can be experimentally applied to investigate performance of lubrication under line contact. It shows great potential for investigating complex lubricant behaviour in compliant contacts to get information stress distribution through experiment approach.
Abbreviations
- \(c\) :
-
Stress-optic coefficient
- \(D\) :
-
Model thickness (mm)
- \({\text{de}}(x)\) :
-
Total elastic deformation
- \(E\) :
-
Equivalent Young’s modulus (Pa)
- \(f_{\sigma }\) :
-
Material fringe value [N/(mm fringe)]
- \(R\) :
-
Radius of cylinder (mm)
- \(h\) :
-
Lubricant film thickness (μm)
- \(I\) :
-
Light intensity of photoelasticity
- \(M\) :
-
Bending moment (N/mm)
- \(n\) :
-
Rotational speed (r/min)
- \(N\) :
-
Fringe order number
- \(\rho\) :
-
Density of fluid (kg/m3)
- \(\rho_{0}\) :
-
Density of lubricant under ambient condition (kg/m3)
- \(\eta\) :
-
Viscosity of fluid (Pa s)
- \(\eta_{0}\) :
-
Viscosity of fluid under ambient condition (Pa s)
- \(p\) :
-
Lubricant film pressure (Pa)
- \(p_{0}\) :
-
Pressure–viscosity coefficient of lubricant (GPa)
- \(u_{\text{s}}\) :
-
Sliding velocity (m/s)
- \(v\) :
-
Poisson’s ration
- \(w\) :
-
Applied load (N/mm)
- \(x,z\) :
-
Dimensional Cartesian coordinates (mm)
- \(\sigma ij\) :
-
Stress component (Pa)
- \((\sigma_{1} - \sigma_{2} )\) :
-
The principal stress difference (Pa)
- \(\tau\) :
-
Shear stress (Pa)
- \(\delta\) :
-
Phase difference
- \(\lambda\) :
-
Wavelength of light (nm)
- \(\varOmega\) :
-
Calculation domain
References
Dowson, D.: Elastohydrodynamic and micro-elastohydrodynamic lubrication. Wear 190(2), 125–138 (1995)
Spikes, H.A.: Sixty years of EHL. Lubr. Sci. 18(4), 265–291 (2006)
Zhu, D., Wang, Q.J.: Elastohydrodynamic lubrication: a gateway to interfacial mechanics—review and prospect. ASME J. Tribol. 133(4), 041001-1–041001-14 (2011)
Bohan, M.F.J., Fox, I.J., Claypole, T.C., et al.: Numerical modelling of elastohydrodynamic lubrication in soft contacts using non-Newtonian fluids. Int. J. Numer. Methods Heat Fluid Flow 12(4), 494–511 (2002)
De Vicente, J., Stokes, J.R., Spikes, H.A.: The frictional properties of Newtonian fluids in rolling–sliding soft-EHL contact. Tribol. Lett. 20(3–4), 273–286 (2005)
Dearn, K.D., Hoskins, T.J., Andrei, L., et al.: Lubrication regimes in high-performance polymer spur gears. Adv. Tribol. (2013). doi:10.1155/2013/987251
Bongaerts, J.H.H., Day, J.P.R., Marriott, C., et al.: In situ confocal Raman spectroscopy of lubricants in a soft elastohydrodynamic tribological contact. J. Appl. Phys. 104(1), 014913-1–014913-10 (2008)
Gasni, D., Wan Ibrahim, M.K., Dwyer-Joyce, R.S.: Measurements of lubricant filmthickness in the iso-viscous elastohydrodynamic regime. Tribol. Int. 44, 933–944 (2011)
Myant, C., Fowell, M., Cann, P.: The effect of transient motion on Isoviscous-EHL films in compliant, point, contacts. Tribol. Int. 72, 98–107 (2014)
Fowell, M.T., Myant, C., Spikes, H.A., et al.: A study of lubricant film thickness in compliant contacts of elastomeric seal materials using a laser induced fluorescence technique. Tribol. Int. 80, 76–89 (2014)
Gohar, R., Cameron, A.: Optical measurement of oil film thickness under elastohydrodynamic lubrication. Nature 200, 458–459 (1963)
Cameron, A., Gohar, R.: Theoretical and experimental studies of the oil film in lubricated point contact. Proc. R. Soc. Lond. Ser. A 291, 520–536 (1966)
Johnston, G., Wayte, R., Spikes, H.: The measurement and study of very thin lubricant films in concentrated contacts. ASME. J. Tribol. 34, 187–194 (1991)
Luo, J., Wen, S., Huang, P.: Thin film lubrication. Part I. Study on the transition between EHL and thin film lubrication using a relative optical interference intensity technique. Wear 194(1), 107–115 (1996)
Roberts, A.D., Tabor, D.: Fluid film lubrication of rubber—an interferometric study. Wear 11(2), 163–166 (1968)
Myant, C.W.: Experimental techniques for investigating lubricated, compliant contacts. Ph.D. thesis, Imperial College London (2010)
Marx, N., Guegan, J., Spikes, H.A.: Elastohydrodynamic film thickness of soft EHL contacts using optical interferometry. Tribol. Int. 99, 267–277 (2016)
Patterson, E.A.: Digital photoelasticity: principles, practice and potential. Strain 38(1), 27–39 (2002)
Ramesh, K., Kasimayan, T., Neethi, Simon B.: Digital photoelasticity—a comprehensive review. Strain Anal. 46, 245–266 (2011)
Solaguren-Beascoa, Fernández M.: Data acquisition techniques in photoelasticity. Exp. Tech. 35(6), 71–79 (2011)
Dally, J.W., Chen, Y.M.: A photoelastic study of friction at multipoint contacts. Exp. Mech. 31(2), 144–149 (1991)
Burguete, R.L., Patterson, E.A.: A photoelastic study of contact between a cylinder and a half-space. Exp. Mech. 37(3), 314–323 (1997)
Foust, B., Lesniak, J., Rowlands, R.: Determining individual stresses throughout a pinned aluminum joint by reflective photoelasticity. Exp. Mech. 51(9), 1441–1452 (2011)
Frankovský, P., Ostertag, O., Trebuňa, F., et al.: Methodology of contact stress analysis of gearwheel by means of experimental photoelasticity. Appl. Opt. 55(18), 4856–4864 (2016)
Klemz, B.L., Gohar, G., Cameron, A.: Photoelastic studies of lubricated line contacts. Proc. I.Mech.E. C39/91, 18–30 (1971)
Johnson, K.J.: Contact mechanics. Cambridge University Press, Cambridge (1985)
Wang, T., Wang, L., Gu, L., et al.: Numerical analysis of elastic coated solids in line contact. J. Cent. South Univ. 22(7), 2470–2481 (2015)
Ajovalasit, A., Petrucci, G., Scafidi, M.: Review of RGB photoelasticity. Opt. Lasers Eng. 68, 58–73 (2015)
Acknowledgements
The authors are grateful to acknowledge financial support by National Natural Science Foundation of China (Grant Nos: 51375167, 51575190).
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 1 (WMV 192 kb)
Supplementary material 2 (WMV 169 kb)
Supplementary material 3 (WMV 208 kb)
Rights and permissions
About this article

Cite this article
Fang, Y., He, J. & Huang, P. Experimental and Numerical Analysis of Soft Elastohydrodynamic Lubrication in Line Contact. Tribol Lett 65, 42 (2017). https://doi.org/10.1007/s11249-017-0825-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11249-017-0825-9