
Abstract
Capsule robot is the direction for future development of capsule endoscopy. The imperfection of friction model between the capsule robot and the intestine has been one of the biggest obstacles of its development. Uniform motion is the main mode of the capsule robot in the intestine. However, the frictional resistance variation of the capsule robot in this period has not been understood completely until now. This is the research content in the paper. First, some experiments are conducted to measure actual frictional resistance with a homemade experiment platform. Next, the model of the frictional resistance at a constant velocity is established based on the hyperelasticity of the intestinal material and the interactive features between the capsule robot and the intestine. At last, the theoretical result of the model is proved to be reasonable by simulation analysis. The model is efficient to describe the frictional resistance variation at a constant velocity and can be seen as another kind of stick–slip motion. The work is hoped to perfect the friction model between the capsule robot and the intestine and contribute to the development of the capsule robot.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Clinical examination and surgery assisted by medical device have been the main method of modern medical diagnostics and treatment [1]. However, broad challenges exist when fundamental research to study frictional characteristics between medical device and biological tissue is no exception. Capsule robot is one of the most representative medical devices. It can examine the whole gastrointestinal (GI) tract noninvasively and actively when performed by doctors who have had special training and are experienced in the endoscopic procedures [2]. Many researchers devote themselves to the study of the capsule robot’s new driving modes and control methods, such as external magnetic field driving, bionic driving, legged locomotion, vibro-impact driving, electrical stimulation driving and combination driving and so on [3–11]. However, no one type of capsule robot has been applied in clinic until now. Now, one of the main limitations that the capsule robot moves in the intestine inefficiently is the imperfection of the friction model due to the presence of complex lumen surface features and a highly motile, tortuous intestine path. The frictional resistance comes from intestinal peristaltic contractions, mucoadhesion, the collapsed lumen and the interaction between the capsule surface and the intestinal inwall [12]. The forces are also applied on the capsule robot by the surrounding organs, weight of the intestinal wall and pressure from the fluid in the intestine. The uncertainty of frictional characteristics has been the main obstacle of the capsule robot’s development.
Macroscale model of frictional resistance between the capsule and the intestine is always set up by experiment investigation. The frictional resistance is influenced by many factors, such as environment characteristic of the intestine, shape parameter and motion parameter of the capsule robot. Hoeg et al. [13] studied the tissue distention of the intestine when a robotic endoscope moved through. An analytical model and an experimental model were developed to predict the tissue behavior in response to loading. Ciarletta et al. [14] used the theory of hyperelasticity to make a stratified analysis of the intestinal wall. The hyperelastic model is significative to research the frictional characteristics of the capsule robot, but it neglects the time effect. Woo et al. [15] considered the friction from the intestine using a thin-walled model and Stokes’ drag equation. However, the model cannot fully describe the material characteristics of the intestine. Kim et al. [16] found that the variation of resistance was correlated with the viscoelasticity of the intestine. A five-element model is used to describe the viscoelastic property of the intestinal stress relaxation. Furthermore, the group first developed an analytical model for the friction prediction, which was verified by finite element analyses. The characteristics of the capsule, such as weight, shape, dimension, material, contour line and surface preparation methods also have great influence on the friction. Researches show that the friction of smooth cylindrical capsule is smaller than other shapes [17, 18]; the influence of the capsule’s length on the friction is greater than that of the diameter [19]; capsule’s quality has no significant effect on the friction [20]; and resin material is suitable for making capsule’s shell [21]. Much less attention has been paid to the effect of capsule robot’s motion parameter such as velocity and acceleration on the frictional resistance. The relation between the friction and the velocity of the capsule has been analyzed qualitatively [17, 19]. The result shows that the friction goes up with the velocity increasing. Their quantitative relation is revealed in our previous work [22]. But the frictional resistance variation of the capsule robot at a constant velocity has not been understood until now.
The frictional resistance of a capsule robot moving in the intestine at a constant velocity is studied in the paper. The actual frictional resistance is measured by experiment. According to the experimental results, the model of frictional resistance at a constant velocity is proposed based on the hyperelasticity of the intestinal material and the interactive features between the capsule robot and the intestine. The validity of the model will be verified by simulation analyses at MATLAB environment. This work is hoped to change the status quo that the capsule robot’s frictional resistance is uncertain at a constant velocity and optimize the capsule robot’s control method.
2 Experiment Methods and Result
Experimental investigation is the most effective way to obtain the actual frictional resistance. For this purpose, a homemade uniaxial experiment platform is developed, and the intestinal sample is prepared by standard method.
2.1 Experimental Platform Construction
A homemade uniaxial experiment platform was developed to test the frictional resistance variation at a constant velocity. The platform consists of two parts: drive unit and data acquisition unit, as shown in Fig. 1. The main part of the drive unit is LMX1E series linear motor system, which is produced by HIWIN. The positioning accuracy of the system can reach ±1 μm. The left side of the drive unit is a load platform. The rotor of the linear motor is combined with a support, on which there fixed a 1 degree of freedom micro-force sensor (FUTEK LSB200), whose accuracy is 1 mN. The probe of the force sensor is connected to a capsule dummy that is placed inside the intestine with a polymer string. The capsule dummy can be pulled by the drive unit with different velocities and accelerations. Flexible polyurethane foam (PUF) is used as the basement to support the intestine. This way can simulate an in vivo environment of the intestine as much as possible. PCI 6229 data acquisition (DAQ) card produced by NI is used to acquire the voltage signal of encoder and micro-force sensor. Then, the signal is transmitted to computer for saving and analysis.

Experiment platform for measuring frictional resistance
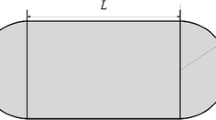
The capsule dummy used in the experiment is made of resin material. The shape of the capsule dummy is an assembly of a cylinder in the center and two hemispheroids in both ends. The dimension is shown in Fig. 2. The weight of the capsule inside the intestine is 3.9 g.

The dimensions of the capsule
2.2 Intestinal Sample Preparation
The intestine used in the experiment was taken from a standardized laboratory pig to ensure the repeatability of experimental results. In order to reduce the effect of the food debris within the intestine, the pig was kept off food, but not water for 24 h. Under the supervision of the medical ethics committee, the pig was killed with an anesthetic overdose and anatomized by professionals. Segments of jejunum were excised from the pig immediately following euthanization and stored in a sink that is filled with 37 °C Tyrode’s solution with continual oxygen supply (1,000 ml Tyrode’s solution consists of NaCl 8.0 g, KCl 0.2 g, MgSO4·7H2O 0.26 g, NaH2PO4·2H2O 0.065 g, NaHCO3 1.0 g, CaCL2 0.2 g, glucose 1.0 g.). When exposed to unconditioned air, intestinal tissue drying had been observed and previously remedied by applying saline to the tissue surface [23]. Because of lack of constant temperature and humidity system in the experiment platform, changing same type test specimens frequently is adopted to ensure the mechanical property of the test specimen. The mesentery and one side of the intestine specimen are fixed on the basement.
2.3 Experimental Process and Result
The drive unit is controlled to pull the capsule at a velocity of 1, 5 and 10 mm/s, respectively. The polymer string is adjusted to a proper tension before each experiment for the purpose of ensuring the synchronism between the force and the velocity. The frictional resistance of the capsule from stationary state to uniform motion and then to stop is shown in Fig. 3. In the figure, x-axis is time and y-axes are frictional resistance (blue curve). All the data are acquired from DAQ card with the sampling frequency of 1 kHz. Because of the power frequency interference and alterable electromagnetic wave interference (EMI), the force signal contains substantial noise signal. Third polynomial order Savitzky–Golay smoothing filter is used to filter the noise. The filtering result is represented by red line. The mean value of the frictional resistance is similar to the result in Ref [22]. It proves that the experimental results are repeatable. The frictional resistance at a constant velocity is not a constant, but a time-dependent undulating curve according to the experimental results.

Experimental results when the capsule moves at different velocity
The frictional resistance at 10 mm/s is chosen as the object of study because this velocity is the closest to the movement velocity when the capsule robot works actually. Therefore, the experiment at 10 mm/s is repeated three times. The experimental data during the uniform motion are shown in Fig. 4. Each set of data fluctuates like a sine wave curve. The peak-valley points of each curve are marked by the dots with color the same as the curves. Some unauthentic peak-valley points are ignored in the analysis. According to the results of numerical calculation, the average peak-to-peak value of each sample is 0.043, 0.046 and 0.053 N, respectively, while the average period is 1.134, 1.328 and 1.018 s, respectively. The experimental results prove that the frictional resistance of the capsule fluctuates regularly at a constant velocity. Next, the model of the frictional resistance at a constant velocity will be established.

Repetitive experimental data at 10 mm/s
3 Modeling of Frictional Resistance at a Constant Velocity
Before the model of frictional resistance at a constant velocity is set up, the interactive features between the capsule robot and the intestine and the material property of the intestine need to be understood.
3.1 Interaction Features Between Capsule and Intestine
When a capsule moves inside the intestine, various forces from the intestine are exerted to the capsule. These forces include environmental resistance, viscous friction and Coulomb friction [22]. According to our previous work, the proportion of viscous friction is small and Coulomb friction is roughly unchanged during the movement of the capsule robot. Therefore, the main reason of the fluctuation of friction is the influence of the environmental resistance variation. The deformation of the intestinal wall needs to be analyzed for the purpose of analyzing the environmental resistance variation. Figure 5 illustrates the deformation of the intestine when a capsule is inserted. The shape of the capsule used in the model is the same as that in the experiment. The radius of the hemispheroid is R. The environmental resistance manifests as a skew force f e exerting on the front hemispheroid of the capsule. For further development of the model, the following assumptions are made.

Interaction features between capsule and intestine
-
1.
The material of the intestine is incompressible.
-
2.
The intestine deforms symmetrically toward its radial direction.
-
3.
The deformation of the intestine is the same as the external shape of the contact surface of the capsule.
-
4.
The intestine deforms smoothly.
Based on the assumptions above, both the contact area on the front hemispheroid and the direction of the equivalent environmental resistance are constant. In other words, the contact angle α and the angle of the skew force θ in Fig. 5 are constants. When the capsule moves forward, the environmental resistance in the longitudinal direction increases because of the axial extension of the intestine, while that in the circumferential direction also increases because the capsule make the intestine expand circumferentially. The value of f e increases, but its direction remains unchanged because these two forces increase proportionally. When the partially extended intestine in the circumferential direction extends completely, the intestine begins to contract in the longitudinal direction and the relaxed intestine is expanded by not only the interaction force of the capsule robot, but also the tension of partially expanded intestine (see Fig. 5). Therefore, the environmental resistance in the longitudinal direction decreases. The above process repeats and then the frictional resistance at a constant velocity fluctuates over time. The intestinal material property needs to be analyzed for the purpose of establishing a quantitative model.
3.2 Hyperelastic Model of Intestinal Material
At present, quasi-linear viscoelastic model is the most common method to describe the intestinal material property. This model is usually used to indicate the stress–strain relationship of the intestinal material under a large time span because there is a time parameter t in the model. When the capsule robot moves in the intestine at a constant velocity, the frictional resistance is ever-changing. The time interval is smaller than the time that the intestine takes to manifest the characteristic of relaxation and creep. Therefore, a hyperelastic model is considered as an effective method to describe the stress–strain properties of the intestinal material. Ciarletta et al. [14] used the hyperelastic constitutive model to deduce the stress–strain relationship of the intestinal material in the longitudinal and circumferential directions, respectively. The analytic expressions are given by
and
where
and \(\lambda_{1}\) and \(\lambda_{2}\) are the principal stretches in the longitudinal and circumferential directions, respectively. \(c_{1}\) is a constant material parameter. \(k_{{1{\text{Coll}}}}\), \(k_{{2{\text{Coll}}}}\) are two material parameters describing the stiffening properties of the collagen network. (\(k_{{1{\text{LM}}}}\), \(k_{{2{\text{LM}}}}\)) and (\(k_{{1{\text{CM}}}}\), \(k_{{2{\text{CM}}}}\)) are the material parameters accounting for the exponential increase in stress with stretch ratio due to the longitudinal and circular muscle layers, respectively.
3.3 Model Simplification of Frictional Resistance Variation
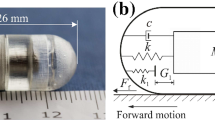
The interactive model between the capsule and the intestine is simplified to a simple physical model for the purpose of analyzing the frictional resistance at a constant velocity, see Fig. 6. An infinitely long flat car is placed on a smooth surface. One side of the car is connected to the wall by a nonlinear spring. On the flat car, there is a slider, which can slide on the car with a variable friction. The slider moves at a constant velocity under conditions of an external force effect. Therefore, the spring cannot return to the relaxed state. Comparing with the actual situation, the slider represents the capsule robot and the flat car is the intestine. The nonlinear spring can simulate the hyperelasticity and the deformation of the intestinal material in the longitudinal direction effectively according to our previous work [24]. The variation of the friction between the slider and the flat car embodies the intestinal environment resistance in the circumferential direction.

Simple physical model of frictional resistance variation
The whole process can be divided to three steps, as shown in Fig. 6. The slider and the flat car moves with a constant velocity \(v_{\text{s}}\) under conditions of the external force F in state A. The car moves with the slider because of the friction f. The spring extends during the movement and then the spring tension \(f_{\text{el}}\) increases. After the friction reaches to \(f_{\hbox{max} }\), relative movement between the slider and the car occurs, and thus, the slider continues to moves forward with the velocity \(v_{\text{s}}\), while the flat car moves backward with the velocity \(v_{\text{c}}\). At last, the spring contracts to the length of state A. The above process will repeat during the movement.
The variation trend of the friction f is shown in Fig. 7. At the moment of t 0, the partially extended intestine in the circumferential direction extends completely. In other word, the environment resistance in the circumferential direction maximizes at this moment. Meanwhile, f increases from \(f_{0}\) to \(f_{\hbox{max} }\) according to the proportional relationship between the two components of the environment resistance. The reason of the frictional increase and decrease is the extension and contraction of intestine, respectively. However, the inflexion of the friction is decided by the intestinal hoop strain.

Variation trend of the friction
Because the capsule robot moves at a constant velocity and the intestine deforms smoothly, we get
when the intestine extends, \(f_{\text{el}}\) can be expressed as
where S is the contact area, which is expressed as
The principal stretch in the longitudinal direction \(\lambda_{1}\) is
where \(v_{\text{c}}\) is the velocity of the flat car, and L is the length of the capsule robot. \(f_{\text{ec}}\) is the circumferential component of \(f_{\text{e}}\). It can be expressed as
and
When \(f_{\text{el}}\) increases, the principal stretch in the circumferential direction \(\lambda_{2}\) increases too according to Eqs. (8) and (9). When \(\lambda_{2}\) reaches to maximum \({1 \mathord{\left/ {\vphantom {1 {\cos \alpha }}} \right. \kern-0pt} {\cos \alpha }}\), f reaches to \(f_{\hbox{max} }\) from \(f_{0}\).
The above theoretical analysis shows that the friction resistance indeed fluctuates when the capsule robot moves in the intestine at a constant velocity. Next, we will use simulation analyses to prove that the theoretical result is consistent with the actual situation.
4 Simulation Analyses
Simulation analyses are an effective method to verify the validity of the model. It is carried out using MATLAB/SIMULINK with the sampling interval \(t_{\text{s}} = 25\;{\text{ns}}\). All the parameters used in the simulation are shown in Table 1, where the parameters of the hyperelastic model are quoted from Ciarletta’s work [14], R, L and \(v_{\text{s}}\) come from the real experimental process, and \(v_{\text{c}}\)is quoted from our previous work [24]. \(f_{0}\) has something to do with the velocity of the capsule robot. Their quantitative relation can be obtained from Ref. [22].
The simulation result is shown by the blue line in Fig. 8. The experimental result of Sample 3 is used as the contrast data. The comparisons of variation trend, amplitude and cycle between the simulation result and the actual friction are noteworthy features. It is common for the actual frictional resistance to fluctuate irregularly because of the biodiversity and the wrinkled environment of the intestinal sample. But the whole trend is a fluctuation curve with a certain amplitude and cycle. It is similar to the simulation result. The average peak-to-peak value of the experimental curve is 0.053 N, while that of the simulation result is 0.056 N. The main reason of the amplitude difference is that the intestine is assumed to contract to initial length in the model, but the intestine cannot fully recover under conditions of the frictional resistance in practice. The cycle of the curve has something to do with the velocity of the capsule robot. The average cycle of the experimental curve is 1.018 s, while that of the simulation result is 0.986 s. In conclusion, the model of the frictional resistance at a constant velocity can describe the real situation efficiently.

Comparison between the simulation result and the actual friction
5 Discussion
The process that the capsule robot moves in the intestine at a constant velocity can be seen as a specific form of stick–slip motion. In any case where the coefficient of kinetic friction is less than the coefficient of static friction, there exists a tendency for the motion to be intermittent rather than smooth. The two contact surfaces will stick until the sliding force reaches the value of the static friction. The surfaces will then slip over one another with a small-valued kinetic friction until the two surfaces stick again. The simplest model for explaining this mechanism of friction, known as ‘stick–slip’, is the case of a spring with a mass attached. In this setup, there is a mass attached to a coiled spring being pulled by a tension force so that the spring moves at a constant velocity. The surface upon which this setup rests has a coefficient of kinetic friction that is much less than the coefficient of static friction [25]. The slider is pulled to move with a constant velocity by an external force as shown by the simple physical model in Fig. 6. The fact that the slider and the flat car move together due to the friction between them can be seen as the stick motion, while their relative motion can be seen as the slip motion. The stick–slip motion is caused by the difference between the coefficient of kinetic friction and that of static friction in general, but this phenomenon in the capsule robot system is caused by the intestinal material property and deformation characteristics.
The traditional stick–slip friction has been proved to be a velocity-dependent friction [26]. The frictional resistance between the capsule robot and the intestine at a constant velocity has the same characteristics. Liu et al. [27] have also found similar results in their work. They noticed that the capsule moves in a stick–slip motion at a very low absolute speed. When the velocity of the capsule robot reach to a larger value, the stick–slip phenomenon is not very obvious, because the response speed of the intestinal deformation cannot follow the external force. In that case, the intestine deforms irregularly, and then the frictional resistance presents an irregular change. Figure 9 shows the experimental result of frictional resistance at the velocity of 40 mm/s. The frictional resistance variation is irregular, and the stick–slip phenomenon disappears. At the moment, many capsule robots move in the intestine at a low velocity, such as the bionic driving [28], legged locomotion [29] and so on. The average velocity of the above capsule robots is smaller than 10 mm/s. Therefore, the research in the paper is significative to lay the foundation for the clinical application of the capsule robot.

Frictional resistance at the velocity of 40 mm/s
6 Conclusion
The frictional resistance of the capsule robot moving in the intestine at a constant velocity is researched and modeled in the paper. The frictional resistance at the velocity of 10 mm/s is measured by experiment with a homemade uniaxial experiment platform. Frictional fluctuation characteristic is found from the experimental result. The model of the frictional resistance at a constant velocity is established based on the hyperelasticity of the intestinal material and the interactive features between the capsule robot and the intestine. The theoretical result of the model is obtained by simulation analysis. Comparing with the experimental result, the theoretical result is efficient to describe the frictional resistance variation at a constant velocity. The model is similar to the stick–slip phenomenon and only effective at a low velocity. This work is hoped to change the status quo that the capsule robot’s frictional resistance is uncertain at a constant velocity and optimize the capsule robot’s control method.
References
Geissler, N., Byrnes, T., Lauer, W., Radermacher, K., Kotzsch, S., Korb, W., Holscher, U.M.: Patient safety related to the use of medical devices: a review and investigation of the current status in the medical device industry. Biomed. Tech. Biomed. Eng. 58(1), 67–78 (2013)
Nakamura, T., Terano, A.: Capsule endoscopy: past, present, and future. J. Gastroenterol. 43(2), 93–99 (2008)
Wang, K., Wang, Z., Zhou, Y., Yan, G.: Squirm robot with full bellow skin for colonoscopy. In: Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics 2010, pp. 53–57
Quaglia, C., Buselli, E., Webster, R.J., Valdastri, P., Menciassi, A., Dario, P.: An endoscopic capsule robot: a meso-scale engineering case study. J. Micromech. Microeng. 19(10), 11 (2009)
Yang, W.A., Hu, C., Meng, M.Q.H., Dai, H.D., Chen, D.M.: A new 6D magnetic localization technique for wireless capsule endoscope based on a rectangle magnet. Chin. J. Electron. 19(2), 360–364 (2010)
Gao, M., Hu, C., Chen, Z., Zhang, H., Liu, S.: Design and fabrication of a magnetic propulsion system for self-propelled capsule endoscope. Biomed. Eng. IEEE Trans. 57(12), 2891–2902 (2010)
Wang, X.N., Meng, Q.H., Chen, X.J.: A locomotion mechanism with external magnetic guidance for active capsule endoscope. In: Engineering in Medicine and Biology Society (EMBC), 2010 Annual International Conference of the IEEE, 31 Aug 2010–4 Sept 2010, pp. 4375–4378
Kim, Y.-T., Kim, D.-E.: A novel propelling mechanism based on frictional interaction for endoscope robot. In: Advanced Tribology, pp. 859–860 (2010)
Ito, T., Ogushi, T., Hayashi, T.: Impulse-driven capsule by coil-induced magnetic field implementation. Mech. Mach. Theory 45(11), 1642–1650 (2010)
Li, H., Furuta, K., Chernousko, F.L.: Motion generation of the capsubot using internal force and static friction. In: Proceedings of the 45th IEEE Conference on Decision and Control 2006, pp. 6575–6580
Sliker, L.J., Wang, X., Schoen, J.A., Rentschler, M.E.: Micropatterned treads for in vivo robotic mobility. J. Med. Devices Trans. Asme 4(4), 8 (2010)
Terry, B.S., Lyle, A.B., Schoen, J.A., Rentschler, M.E.: Preliminary mechanical characterization of the small bowel for in vivo robotic mobility. J. Biomech. Eng. 133(9), 091010 (2011)
Hoeg, H.D., Slatkin, A.B., Burdick, J.W., Grundfest, W.S.: Biomechanical modeling of the small intestine as required for the design and operation of a robotic endoscope. In: Proceedings of IEEE International Conference on Robotics and Automation, 2000, pp. 1599–1606
Ciarletta, P., Dario, P., Tendick, F., Micera, S.: Hyperelastic model of anisotropic fiber reinforcements within intestinal walls for applications in medical robotics. Int. J. Robot. Res. 28(10), 1279–1288 (2009)
Woo, S.H., Kim, T.W., Mohy-Ud-Din, Z., Park, I.Y., Cho, J.-H.: Small intestinal model for electrically propelled capsule endoscopy. BioMed. Eng. Online 10, 108 (2011)
Kim, J.S., Sung, I.H., Kim, Y.T., Kim, D.E., Jang, Y.H.: Analytical model development for the prediction of the frictional resistance of a capsule endoscope inside an intestine. In: Proceedings of the Institution of Mechanical Engineers Part H-Journal of Engineering in Medicine 221(H8), 837–845 (2007)
Kim, J.S., Sung, I.H., Kim, Y.T., Kwon, E.Y., Kim, D.E., Jang, Y.H.: Experimental investigation of frictional and viscoelastic properties of intestine for microendoscope application. Tribol. Lett. 22(2), 143–149 (2006)
Wang, K.D., Yan, G.Z.: Research on measurement and modeling of the gastro intestine’s frictional characteristics. Meas. Sci. Technol. 20(1), 015803 (2009)
Wang, X., Meng, M.Q.H.: An experimental study of resistant properties of the small intestine for an active capsule endoscope. In: Proceedings of the Institution of Mechanical Engineers Part H-Journal of Engineering in Medicine 224(H1), 107–118 (2010)
Zhang, C., Su, G., Tan, R., Li, H.: Experimental investigation of the intestine’s friction characteristic based on “internal force-static friction” capsubot. In: IASTED International Conference on Biomedical Engineering, Innsbruck, Austria 2011. Proceedings of the 8th IASTED International Conference on Biomedical Engineering, Biomed 2011, pp. 117–123
Li, J., Huang, P., Luo, H.D.: Experimental study on friction of micro machines sliding in animal intestines. Lubr. Eng. 175(3), 119–122 (2006)
Zhang, C., Liu, H., Tan, R., Li, H.: Modeling of velocity-dependent frictional resistance of a capsule robot inside an intestine. Tribol. Lett. 47(2), 295–301 (2012)
Lyle, A.B.: Evaluation of small bowel lumen friction forces for applications in in vivo robotic capsule endoscopy. M.S., University of Colorado at Boulder (2012)
Zhang, C., Liu, H., Su, G., Tan, R., Li, H.: Research of intestines’ dynamic viscoelasticity based on five-element model. Gaojishu Tongxin/Chin. High Technol. Lett. 22(9), 964–968 (2012)
Astrom, K.J., Canudas-De-Wit, C.: Revisiting the LuGre friction model stick–slip motion and rate dependence. IEEE Control Syst. Mag. 28(6), 101–114 (2008)
Li Chun, B., Pavelescu, D.: The friction-speed relation and its influence on the critical velocity of stick–slip motion. Wear 82(3), 277–289 (1982)
Liu, Y., Pavlovskaia, E., Hendry, D., Wiercigroch, M.: Vibro-impact responses of capsule system with various friction models. Int. J. Mech. Sci. 72, 39–54 (2013)
Karagozler, M.E., Cheung, E., Kwon, J., Sitti, M.: Miniature endoscopic capsule robot using biomimetic micro-patterned adhesives. In: Proceedings of IEEE/RAS-Embs International, pp. 866–872 (2006)
Valdastri, P., Webster, R.J., Quaglia, C., Quirini, M., Menciassi, A., Dario, P.: A new mechanism for mesoscale legged locomotion in compliant tubular environments. IEEE Trans. Rob. 25(5), 1047–1057 (2009)
Acknowledgments
This work was supported by the National Natural Science Foundation of China (No. 61105099) and the National Technology R&D Program of China (No. 2012BAI14B03).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Zhang, C., Liu, H. & Li, H. Modeling of Frictional Resistance of a Capsule Robot Moving in the Intestine at a Constant Velocity. Tribol Lett 53, 71–78 (2014). https://doi.org/10.1007/s11249-013-0244-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11249-013-0244-5