
Abstract
Friction and wear of single layers of graphene have been studied at the micrometer scale. Epitaxial graphene grown by thermal decomposition on SiC-6H(0001) is found to have an initial friction coefficient of 0.02, significantly lower than graphite under the same experimental conditions. During reciprocal sliding the graphene layer is damaged. The evolving friction coefficient of 0.08 for the carbon-rich interface layer terminating the SiC layer is still lower than that of graphite and five times lower than that of the hydrogen-etched SiC substrate. Micrometer-sized patches within the sliding track retain the low friction coefficient of graphene even after hundred sliding cycles.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Graphene is the fascinating fundamental component of graphite. Its exotic electronic properties are currently subject of a multitude of scientific and technological studies [1]. Since graphene is also the functional building block of the widely used solid lubricant graphite, its frictional properties are also of great interest.
The effects of the chosen substrate and of the preparation method on the final friction coefficient of graphene were examined in several recent studies. Friction force microscopy (FFM) has shown that nanometer-scale friction forces for a single asperity differ significantly when sliding on single layer graphene, on double layer graphene, and on graphite [2]. Friction on SiC was found to be greatly reduced by a single layer of epitaxial graphene, and double layer graphene was found to outperform even graphite as a lubricant. Further single-asperity FFM studies included various layered materials, finding again a decrease of friction with increasing number of layers [3]. Exfoliated graphene layers on silicon oxide exhibit almost two times higher friction coefficients compared to graphite. For the exfoliated layers, the layer dependence was explained as a consequence of a puckering effect, where the tip of the friction force microscope deforms ultrathin layers in the course of sliding. This deformation leads to higher contact area and therefore to higher friction. Exfoliated graphene deposited on mica does not show any deformation effects due to the high adhesion between the graphene layer and the substrate, and consequently no dependence of friction on layer thickness [4]. These results could also explain further experiments finding higher friction on exfoliated graphene than on graphite [5]. Very good lubrication was achieved by graphene grown by chemical vapor deposition on Cu and Ni and transferred onto SiO2, where friction was reduced by a factor of more than three [6]. The observation was explained by the strong reduction of adhesion between surface and pin and by morphological smoothing due to the graphene layer. Superior lubrication by graphene obtained from Ni as compared to graphene obtained from Cu was attributed to a carbon buffer layer between graphene obtained from Ni and the SiO2 substrate, which is not present on graphene obtained from Cu. Tribological tests performed directly on the Ni substrates after graphene deposition resulted in a very low value of 0.03 for the friction coefficient, which was explained by the very high adhesion between the graphene layer and the Ni substrate. A similarly low friction coefficient has recently also been reported for micrometer-scale tribological testing on exfoliated graphene on SiO2 [7].
These findings make graphene a potential candidate as low-friction material for low-load devices like micro-electromechanical systems (MEMS) which possess sliding contacts [8]. At the same time they clearly show that substrate and production process are important parameters in the tribology of graphene. The bond between graphene and the substrate plays a key role in the lubrication. The graphene with the strongest adhesion to the substrate appears to be most promising from the tribological point of view. In order to further evaluate the potential of graphene in tribological applications we have studied epitaxial graphene, expected to be strongly bound to the SiC substrate, in a micrometer-scale multi-asperity experiment. Friction has been measured by means of a microtribometer on single layers of graphene on SiC and compared to friction on SiC and graphite. Wear in the sliding track has been analyzed by means of FFM.
2 Experimental Details
2.1 Graphene Sample Preparation
The substrates were commercially available SiC-6H(0001) wafers (Si face, SiCrystal AG, Erlangen, Germany) which were first prepared by hydrogen etching. The resulting surface exhibits atomically flat terraces of micrometer width which are separated by steps with a height of multiples of one half the unit cell of SiC-6H (see Fig. 1a). Graphene layers were prepared by thermal decomposition of these SiC surfaces in an argon atmosphere [9]. The resulting surfaces still show a similar terrace structure, but with curved steps separating the atomically flat terraces as shown in Fig. 1b.

a Topographic image recorded by atomic force microscopy (AFM) on a SiC(0001) surface prepared by hydrogen etching; height of steps ranges from 0.75 nm (half the unit cell of SiC-6H) to about 7 nm. b Topographic image recorded by AFM on a graphene layer grown by thermal decomposition on a SiC(0001) surface; step heights are all of the order of 1 nm
As a consequence of the graphene growth by thermal decomposition, the surfaces comprise a so-called carbon-rich interface layer between SiC surface and graphene layer [10]. This SiC surface termination exhibits a graphitic (6√3 × 6√3) structure which is covalently bound to the substrate. The single-layer graphene on top of the interface layer has no covalent bonds to the substrate, but adheres strongly to the interface layer due to perfect commensurability. All surfaces were prepared weeks before the experiments and stored under ambient conditions.
For comparison, friction force measurements have also been performed on graphite surfaces and on the SiC substrate. The highly oriented pyrolytic graphite (SPI-2, SPI Supplies) was cleaved with adhesive tape immediately before recording friction data.
2.2 Counter Face and Tribometer Set up
A microtribometer with a sphere-on-flat set up was employed for the micrometer-scale friction experiment (Basalt-Must, Tetra Ilmenau). The main design principles of the microtribometer can be found in Reference [11]. The applied load and the friction force are measured as the normal and lateral deflection of a double-leaf cantilever by means of a fiber-optical sensor. For the data reported in this article, we used a cantilever with a normal spring constant of k n = 21.1 N/m and a lateral spring constant of k l = 24.0 N/m. The temperature in the tribometer housing was constant around 30 °C during measurements, while humidity changed following external weather conditions between 40 and 60 % RH. Both values were measured using a sensor that was placed a few centimeters away from the contact area. Several tests at different humidity levels (in the range mentioned before) showed no influence of the humidity on the results.
The counter faces used for the experiments were commercially available ruby spheres (Spherotech, Lake Forest, USA). The spheres had a diameter of 500 μm and a RMS roughness of 11 nm on a scale of 5 μm. Height variations due to roughness amount to twice the height differences due to curvature on this scale so that we expect contact in form of multiple asperities. Before each measurement, the surface of the sphere was cleaned with isopropanol. The successful removal of residual debris was confirmed by optical microscopy.
Each friction experiment consisted of a sequence of 100 reciprocating cycles on the same track at constant applied load. The sliding length was 400 μm and the sliding speed 50 μm/sec. The friction coefficient was determined as the average of the lateral force over one complete cycle divided by the applied load. A piece of 10 μm of data has been cut off the beginning and at the end of each track in order to omit data from the transition from static to kinetic friction. No static friction peak protruding from the kinetic friction has been observed.
Normal loads were varied from 0.1 to 1.0 mN. A load of 1 mN corresponds to an average pressure of about 350 MPa if calculated according to Hertzian contact mechanics and assuming a single spherical contact point. This results in a Hertzian contact radius of about 1 μm. However, considering a multi-asperity contact we assume a real contact pressure from several hundreds of MPa into the GPa range.
3 Results
3.1 Tests on Graphene
Figure 2 compares the development of the friction coefficient for repeated sliding on a single layer of graphene, on the SiC substrate, and on graphite. It is striking to observe that a single layer of graphene is an excellent lubricant on SiC in this microtribometry experiment. Initially, the friction coefficient is as low as 0.02, more than one order of magnitude lower than for the bare SiC surface. With repeated cycles, the graphene friction coefficient increases and approaches a value which is still a factor of five lower than that of SiC and a factor of two lower than of graphite, also shown for comparison. A second important observation is that the scatter in the data for different loads is less for graphene than for the bare SiC surface or for graphite. Furthermore, the friction coefficient develops smoothly for graphene, while sudden jumps are observed for graphite. We have not found any systematic dependence of the friction coefficient on the normal load within the given load range for either graphene, or graphite, or SiC.

Evolution of the friction coefficient on SiC (red), graphene (black), and graphite (blue) as function of cycle number for applied loads ranging from 0.1 to 1 mN. The friction coefficient μ exhibits no systematic dependence on the applied load (Color figure online)
While the SiC and graphite surfaces exhibit none or a minor irregular running-in behavior, the evolution of the friction coefficient on graphene consistently follows two phases. During the first few cycles it rises from μ = 0.02 to about μ = 0.04, then it continuously increases at a much slower rate. If we model the development as sum of two exponential functions with different rate constants towards a final value, the characteristic number of cycles for the first fast phase is 6 ± 1 cycles, while the second phase lasts typically for 200 cycles, i.e., longer than the data set presented here. The final friction coefficient for the graphene surface is then projected to be μ = 0.09 ± 0.01. A similar slow increase of friction can also be observed for the graphite surface and to a lesser degree for the SiC surface.
The friction coefficient exhibits a significant spatial variation along the sliding track. This spatial variation is plotted in Fig. 3a as a function of the cycle number in a representation which was introduced under the term triboscopy [12]. Each pixel in this map represents the color-coded value of the friction coefficient value at a specific position for a given cycle. The map indicates that the friction coefficient develops differently at different sites along the track. Three characteristic developments of the friction coefficient can be distinguished. Examples for these characteristic developments are given in Fig. 3b in form of friction vs. cycle curves.

a Spatial variation of the friction coefficient along the sliding track as a function of cycle number for a single-layer graphene on SiC. Each data point represents a spot of 0.5 μm length. The data were recorded with an applied load of 0.3 mN. b Example curves taken from (a) showing the development of the friction coefficient at four different spots
The topmost curve in Fig. 3b represents the development found for most spots along the track. The friction coefficient increases quickly during the first cycles and approaches its final value within the first fast phase. The second curve from top in Fig. 3b represents about 30 % of all spots within the track. The friction coefficient increases quickly to a certain intermediate level and then starts a slow but steady increase. The development at these spots is the origin of the overall slow increase of the friction coefficient in Fig. 2. Finally, the two lowest curves represent two extreme developments where the friction coefficient, after a short initial increase, returns to the low initial value of 0.02.
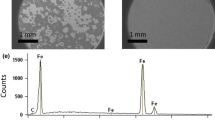
The sliding tracks both on SiC substrates and on graphene samples were analyzed after the tribological tests by means of AFM. Two parallel lines of wear debris indicate the trace of the sliding sphere on a SiC substrates surface shown in Fig. 4a. The two lines indicate that at least two microscopic contact spots were formed between the ruby sphere and the surface. Since neither the terraces nor the steps are affected by the repeated sliding, we assume that the distributed debris originates from the ruby sphere.

a Topographic image recorded by AFM on a SiC surface (frame size 8 μm by 8 μm, height of steps 0.75 nm). Distributed debris indicates the sliding track running from top to down. The arrow quantifies the width of the wear track formed by a multi-asperity contact. Note that neither the atomically flat terraces nor the steps are damaged by the sliding sphere. b Friction force map of a graphene/SiC surface recorded by means of FFM (frame size 10 μm by 10 μm). The sliding track (produced at a load of 0.1 mN) runs vertically across the frame. The normal load in the AFM experiment was 1 nN, the adhesive force to be added was 26 nN. An arrow of the same dimension as the one in a has been added to compare the width of the wear tracks
Topographical AFM measurements on the graphene sample on the micrometer scale would not provide us with quantitative information about the condition of the graphene layer in the wear track. On the other hand, we expect a strong friction contrast between the SiC substrate and areas covered with graphene. Therefore, we analyzed the sliding tracks on the graphene samples by FFM. The resulting friction force maps (see Fig. 4b) show that the graphene layer is damaged along the sliding track. Friction in the damaged areas is significantly higher than on the graphene layer surrounding the track. However, some patches with typical extensions of 1–2 μm within the sliding track appear intact and exhibit low friction comparable to the surrounding graphene layer. In many instances, we find that the edges of such patches align with steps of the underlying substrate.
Wear tracks on SiC and graphene are not visible with optical microscopy. Because of this, we are not able to exactly locate the position of the area that was measured by AFM (Fig. 4) along the wear track and therefore, we cannot correlate local damage with a specific microscopic friction coefficient.
4 Discussion
Based on the experimental results, we can conclude that a single layer of epitaxial graphene grown on SiC(0001) is an excellent lubricant. The friction coefficient μ of these graphene layers starts at a value of about 0.02 and reaches a value of about 0.05 after 100 cycles of reciprocal sliding. Both values are not only lower than those of highly oriented graphite but also develop in a very stable fashion. These findings are consistent with previous studies of epitaxial graphene on SiC at the nanometer scale [2] and of exfoliated graphene at the micrometer scale [6, 7]. The improved lubrication as compared to graphite can be attributed to the hard substrate which reduces the contact area and the larger size of graphene domains as compared to the flakes forming graphite. Furthermore, the strong adhesion between graphene and its SiC substrate prevents the out-of-plane deformation which was found to increase friction on exfoliated graphene [3].
Kim et al. [6] have shown by AFM analysis that reciprocal sliding can damage lubricating graphene layers. The FFM images in Fig. 4b extend these results by providing an explanation for the spatial variation observed in the triboscopy graph shown in Fig. 3a. Although a direct correlation between data plotted in Figs. 3 and 4b is currently not possible, it is evident that graphene patches remain on the surface within the sliding track and cause friction coefficients as low as 0.02 at some spots in Fig. 3a. Repeated cycling with the multi-asperity ruby sphere ruptures the graphene layer and exposes a stable interface layer whose friction coefficient of 0.08 is still a factor of four lower than that of the hydrogen-etched SiC surface. Future high-resolution force microscopy experiments are required to confirm our assumption that this tribologically stable surface is the graphitic covalently bound interface layer, which develops on the SiC surface in the course of the thermal decomposition procedure. The presence of a carbon buffer layer and its role in graphene lubrication was similarly discovered by Kim et al. [6] for graphene grown on and transferred from a Ni substrate. While the graphene layer provides us with extremely low friction coefficients for the intact surface, the stable interface layer assures the still favorable coefficient of friction after hundreds of sliding cycles.
It should be noted that the friction force obtained at the nanoscale with FFM (reported in Fig 4b) on the buffer layer is about three times of the one obtained on graphene while the values of friction coefficient obtained at the microscale (Fig. 3) range between 0.02 and 0.08. The difference between the two scales is due to the influence of the water layer and to the different materials (SiO2 for FFM and ruby for microtribometer). It is likely that a water meniscus between tip and surface (during FFM tests) is responsible for the significant adhesion force observed in FFM. This implies that the measured friction force values are affected by the interfacial water molecules. Due to higher local pressure in the microtribological experiments water plays a less significant role.
Optical microscopy has not revealed any significant transfer of material to the ruby sphere in the course of sliding. Furthermore, measurements performed at higher loads result in visible wear of the ruby sphere. We therefore suggest that the frictional development of our system is not due the formation of a third body composed of graphene flakes but rather reflects the direct contact between sphere and surface.
The initial fast increase of the friction coefficient of graphene-covered SiC reported in Fig. 2 occurs at the same rate for all loads between 0.1 and 1.0 mN. This finding can probably be explained by the high local shear stress produced by micro-asperities of the ruby sphere, cutting the graphene along steps of the SiC substrate and thereby removing flakes of the graphene film. This hypothesis is supported by the observation that the boundaries of remaining graphene patches often align with the steps of the SiC substrate.
Comparing the localized wear debris on the SiC substrate in Fig. 4a with the width of damaged graphene in Fig. 4b one concludes that the actual pressure at the microscopic contact points is high enough to rupture the graphene even at the apparently moderate normal load of 0.1 mN. The overall width of the wear track is both on SiC and on graphene about 3 μm. Although this value is comparable to the Hertzian contact radius value reported above (1 μm), the presence of two well separated wear tracks in Fig. 4a proves that the real contact pressure is much higher and it becomes presumably even higher at the step edges.
5 Conclusions
Microtribological experiments on graphene epitaxially grown on SiC(0001) demonstrate excellent lubrication properties of the system. The friction coefficient of the graphenized surface is five times lower than that of the SiC substrate. Initially, the intact graphene coverage provides an even lower friction coefficient. An analysis of the sliding track by means of FFM shows that microscopic asperities rupture the graphene layer during the first few sliding cycles even at low loads. The long-term lubrication is a mixed effect of the stability and the low friction of a covalently bound graphitic interface layer and of graphene patches remaining attached to atomically smooth terraces of the SiC substrate. Future work should address the preparation of graphene films on SiC and other substrates with the goal of a better stability against rupture.
References
Geim, A.K., Novoselov, K.S.: The rise of graphene. Nat. Mater. 6, 183–191 (2007)
Filleter, T., McChesney, J.L., Bostwick, A., Rotenberg, E., Emtsev, K.V., Seyller, Th, Horn, K., Bennewitz, R.: Friction and dissipation in epitaxial graphene films. Phys. Rev. Lett. 102, 086102 (2009)
Lee, C., Li, Q., Kalb, W., Liu, X., Berger, H., Carpick, R.W., Hone, J.: Frictional characteristics of atomically thin sheets. Science 328, 76–80 (2010)
Li, Q.Y., Lee, C., Carpick, R.W., Hone, J.: Substrate effect on thickness-dependent friction on graphene. Phys. Status Solidi B 247, 2909–2914 (2010)
Lee, H., Lee, N., Seo, Y., Eom, J., Lee, S.W.: Comparison of frictional forces on graphene and graphite. Nanotechnology 20, 325701 (2009)
Kim, K., Lee, H.J., Lee, C., Lee, S.K., Jang, H., Ahn, J.H., Kim, J.H., Lee, H.J.: Chemical vapor deposition-grown graphene: the thinnest solid lubricant. ACS Nano 5, 5107–5114 (2011)
Shin, Y.J., Stromberg, R., Nay, R., Huang, H., Wee, A.T.S., Yang, H., Bhatia, C.S.: Frictional characteristics of exfoliated and epitaxial graphene. Carbon 49, 4070–4073 (2011)
Ashurst, W.R., Wijesundara, M.B.J., Carraro, C., Maboudian, R.: Tribological impact of SiC encapsulation of released polycrystalline silicon microstructures. Tribol. Lett. 17, 195–198 (2004)
Emtsev, K.V., Bostwick, A., Horn, K., Jobst, J., Kellogg, G., Ley, L., McChesney, J.L., Ohta, T., Reshanov, S.A., Röhrl, J., Rotenberg, E., Schmid, A.K., Waldmann, D., Weber, H.B., Seyller, T.: Towards wafer-size graphene layers by atmospheric pressure graphitization of silicon carbide. Nat. Mater. 8, 203–207 (2009)
Lauffer, P., Emtsev, K.V., Graupner, R., Seyller, T., Ley, L., Reshanov, S.A., Weber, H.B.: Atomic and electronic structure of few-layer graphene on SiC(0001) studied with scanning tunneling microscopy and spectroscopy. Phys. Rev. B 77, 155426 (2008)
Scherge, M., Gorb, S.: Biological Micro- and Nanotribology. Springer, Berlin (2001)
Belin, M., Martin, J.M.: Triboscopy, a new approach to surface degradations of thin films. Wear 156, 151–160 (1992)
Acknowledgments
We thank Thomas Seyller of the University of Erlangen–Nürnberg for samples preparation and acknowledge support from the Deutsche Forschungsgemeinschaft (DFG) as part of the ESF EUROCORES Programme FANAS. Authors at the INM thank Eduard Arzt for continuing support of this study.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Marchetto, D., Held, C., Hausen, F. et al. Friction and Wear on Single-Layer Epitaxial Graphene in Multi-Asperity Contacts. Tribol Lett 48, 77–82 (2012). https://doi.org/10.1007/s11249-012-9945-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11249-012-9945-4