
Abstract
Recent research has shown that hydrodynamic lubrication is an effective means of reducing friction in high sliding micro-electromechanical systems (MEMS). At high speeds, however, such lubrication can lead to increased friction due to viscous drag. This article describes a series of hydrodynamic tests on a silicon MEMS contact lubricated with a blend of hexadecane and a multiply-alkylated cyclopentane (MAC). Results show that the presence of the MAC reduces hydrodynamic friction compared with neat hexadecane. Such behaviour is contrary to conventional hydrodynamic theory, since the viscosity of the MAC—a mixture of di- and tri-(2-octyldodecyl)-cyclopentane—is significantly higher than that of neat hexadecane. This effect increases with MAC concentration up to an optimum value of 3 wt%, where the hydrodynamic friction coefficient at 15,000 rpm is reduced from 0.5 to 0.3. Above this concentration, friction begins to rise due to the overriding effect of increasing viscosity. The viscosity of the blended lubricant increased monotonically with MAC concentration, when measured using both a Stabinger and an ultra-high shear viscometer. In addition to this, no reduction in friction was observed when a squalane–hexadecane blend of equal viscosity was tested. This suggests that some property of the MAC–hexadecane lubricant, other than its viscosity, is influencing hydrodynamic lubrication. A tentative explanation for this behaviour is that the MAC induces the liquid to slip, rather than shear, close to the silicon surfaces. This hypothesis is supported by the fact that the friction reducing ability of the MAC blend was inhibited by the inclusion of octadecylamine—a substance known to form films on silicon surfaces. Furthermore, the MAC reduces friction in the mixed regime, in a manner suggesting that the formation of a viscous boundary layer. This unusual behaviour may have useful implications for reducing hydrodynamic friction in liquid-lubricated MEMS devices.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Micro-electro-mechanical systems (MEMS) are small scale devices, which have developed as a result of advances in semiconductor fabrication over recent decades. These devices are now used in a range of commercial applications including optical signal processing [1], RF switching [2], inertial sensing [3], and biosensing [4]. In addition to these, MEMS offer the potential to enable many new applications. It is well-known, however, that MEMS suffer from significant problems in terms of friction, adhesion, and wear, which limit their use in applications requiring sliding contacts. These problems arise mainly because of the dominance of surface forces over body forces that occur at small length scales [5]. The situation is exacerbated by the poor tribological properties of silicon (the most common material used for MEMS), which is both brittle and of high surface energy.
The potential usefulness of MEMS, combined the significant tribological challenges they pose, has driven considerable research into means of lubricating silicon surfaces. Proposed solutions include surface treatments such as self-assembled mono-layers [6–8], coatings such as diamond-like carbon [9, 10], and hydrogen termination [11]. Many of these treatments have been effective at reducing stiction, but have struggled to provide protection against prolonged sliding, since, once worn away, there is no means of replenishment. For this reason, two self-replenishing methods of lubricating MEMS have been investigated, namely liquid and vapour phase lubrication.
In the latter approach, a lubricant film is formed due to the condensation of vapour—typically of an alcohol—on the rubbing surfaces [12, 13]. This approach is very effective in preventing wear, but requires special hermetic packaging [14] that can limit the possible application of devices and reduce their economic viability. Interestingly, analysis of silicon surfaces after lubrication by alcohol vapour reveals oligomeric species, formed via tribochemical reactions of the adsorbed molecules [15].
Liquid lubrication of MEMS has been shown to prevent wear [16] and give low friction [17] in a MEMS contact. Furthermore, under certain conditions, liquid lubrication gives lower friction than the same MEMS contact lubricated by vapour [16]. This, however, is not necessarily the case for all conditions since friction in liquid-lubricated contacts varies strongly with entrainment speed. Such behaviour is summarized by a Stribeck curve, which plots friction versus speed. At low speeds where fluid entrainment is insufficient to separate the contacting surfaces (boundary regime), friction is approximately constant. As speed increases, liquid entrainment due to the hydrodynamic effect begins to separate surfaces so that friction decreases (mixed regime). Once surfaces are fully separated, friction increases with speed due to increased shearing of the fluid film (hydrodynamic regime). In order for liquid lubrication to be effective in MEMS, the friction arising in each of these regimes must be controlled. It has been shown that boundary friction of sliding silicon MEMS can be reduced effectively when a friction modifier additive is blended with the liquid; amine additives work well for this since their basic head group is attracted weakly acidic silica surfaces [18].
Hydrodynamic friction in small scale devices was initially thought to be sufficiently high so as to make liquid lubrication of MEMS unfeasible [19, 20]; however, the liquids chosen in these early studies were of high viscosity. When liquids of suitably low viscosity were used, friction coefficients below 0.1 were measured for a MEMS thrust pad bearing rotating at 10 kRPM [17]. Despite the proven effectiveness of using low viscosity fluids as lubricants, it is still necessary to find means of further reducing hydrodynamic friction in liquid lubricated MEMS. One reason for this is that very low viscosity fluids typically have high vapour pressures, and this conflicts with the requirement that contacts operate for extended periods of time without confinement.
The most well-known method of controlling hydrodynamic friction without reducing viscosity is to promote the occurrence of ‘slip at the wall’. This is the boundary condition in which the fluid slides close the component surfaces in a similar manner to that of a solid, i.e. the velocity of the fluid at the fluid/surface interface is not equal to that of the surface.
The potentially useful implications of liquid slip were suggested by Spikes [21] in their development of the ‘half wetted bearing’ principle. This was first studied by extending Reynolds’ theory to show that load support combined with very low friction could result from a bearing where the lubricant was able to slip against one surface but not the other [21]. The principle was then applied to low-load MEMS contacts where it showed significant potential to reduce friction [22]. This theory was then validated experimentally using a low-load tribometer in which hexadecane slipped against a smooth, lyophobized sapphire surface [23]. In addition to this, reduced friction resulting from liquid slip was also shown to occur in low load contacts where the surfaces were treated with friction modifier additives [24].
In addition to the work described above, a number of other experiments have shown that liquid slip can occur, particularly when surfaces are very smooth and the liquid does not strongly wet them (for a more detailed review see Ref. [23]). Pit et al. [25] for instance used fluorescence recovery after photo-bleaching (FRAP) to show that hexadecane slipped against a sapphire surface that had been made lyophobic with a monolayer of octadecyltrichlorosilane. Evidence for slip was also provided by Zhu and Granick [26], who measured reduced hydrodynamic squeeze forces between mica surfaces coated with a lyophobic monolayer and lubricated with tetradecane and water.
The current paper describes a series of experiments on a silicon MEMS contact, in which a reduction in hydrodynamic friction is observed when a multiply alkylated pentene is blended with a hexadecane base fluid. Results suggest the occurrence of liquid slip similar to that described above.
2 Experimental Details
2.1 Test Lubricants and Additives
The base fluid used in this work was hexadecane, a linear alkane with the chemical formula C16H14. The hexadecane was blended with a commercially-available, multiply-alkylated cyclopentane (MAC), at the range of concentrations shown in Table 1.
MACs are synthesised hydrocarbons, with molecules that consist of a cyclopentane ring with 2–5 alkyl chains substituted. They are produced by cracking dicyclopentadiene to form cyclopentadiene, which is then allowed to react with alcohols in the presence of strong base [27]. Due to their thermal stability and low volatility, MACs are gaining acceptance as lubricants for space applications [15–22], and have been recommended as possible lubricants in the field of nanotribology [16, 23]. The specific MAC that we tested was the commercially available Nye 3001A, which is a mixture of di- and tri-(2-octyldodecyl)-cyclopentane. This fluid is a saturated hydrocarbon containing no additives (though MAC-compatible additives have been developed [28]). A table of the physical properties of this lubricant has been given by Dube et al. [29].
Tests were also carried out with an amine friction modifier additive included in the MAC–hexadecane blend. Octadecylamine (ODA) was used as a probe to investigate the fluid behaviour at the surfaces, since it has been shown to form a friction-reducing boundary film on silica. To ensure the powdered amine dissolved completely in hexadecane, the solution was heated to 60 °C for 30 min.
2.2 Test Apparatus and Procedure
The tribometer used in this work to investigate high-speed sliding contacts under MEMS conditions is described in detail in [30] and is shown in schematic form in Fig. 1. In this equipment, the frictional torque is measured between two silicon disc specimens. The lower specimen is mounted on a horizontal platform which is supported on an elastic suspension designed to have low stiffness for vertical displacement and for rotation about a vertical axis. The upper specimen is attached to the rotating shaft of a high-speed DC motor, vertical position of which is controlled accurately using a computer-controlled z-stage.

Schematic of MEMS tribometer test rig
Before each test, a droplet of test fluid of approximately 2 μl was placed on the lower specimen. This approach allows accurate alignment of the specimens and differs from previous work [18] where a lubricant bath was used (preparatory tests showed that this new approach had no effect on the measured friction). Next, the axes of the two disc specimens (viewed using two video cameras) were aligned, and specimens were loaded together with the required normal force by adjusting the vertical position of the upper specimen and motor. Normal load values are obtained by multiplying the vertical deflection of the lower specimen (measured by a laser displacement device) by the platform’s normal stiffness. A photograph of the loaded specimens is shown in Fig. 2.

Photograph of specimens loaded in MEMS Test Rig
Once specimens were loaded together, each test involved measuring frictional torque while increasing the rotational speed of the upper specimen in a stepwise fashion. Here, the frictional torque was obtained by multiplying the platform stiffness by the angular rotation of the lower specimen (measured using an optical lever technique as described in [17, 18]).
For all the tests in this study, the vertical displacement of the specimens was 3.2 μm, which corresponds to a normal load of 0.05 N. The motor was started at a speed of 10 rpm, and increased to 15,000 rpm. Similar to previous studies, data and motor control were automated using LabVIEW software [18, 30].
2.3 Test Platforms and Specimens
The specimens and test platforms are similar to those used in previous work [18, 30] but with slightly different specimen dimensions as shown by Fig. 3. The platforms were fabricated from silicon wafers with 100-mm diameter and 525-μm thickness, using a combination of photolithography and through-wafer Deep Reactive Ion Etching (DRIE). The disc specimens were fabricated using the same approach. For all tests, the upper specimens attached to the motor shaft were flat, while the lower specimens attached to the platform were patterned similar to that of a thrust pad bearing with a step height of 50 μm.

Dimensions of etched stepped pad bearing
3 Results and Discussion
3.1 Hexadecane with MAC
Tests were carried out on the range of hexadecane and MAC blends detailed in Section 2.1, using the experimental approach described in Section 2.2. Results are generally plotted as Stribeck curves of friction coefficient against speed on a logarithmic scale.
Figure 4 shows the variation in friction with speed for a contact lubricated with neat hexadecane. Here, a typical Stribeck curve is observed, showing the boundary, mixed, and hydrodynamic regimes. Boundary friction is approximately 0.2 and full hydrodynamic lubrication occurs above speeds of approximately 700–800 rpm—values that are consistent with those found in previous work [18, 30]. Also displayed is the friction when pure MAC is used. In this case, viscous friction increases dramatically even at low speeds, which is to be expected since the viscosity of the MAC (18.6 cP at 25 °C) is considerably higher than that of hexadecane (3.1383 cP). In addition to the neat lubricants, the friction for a blend of 3 wt% MAC in hexadecane is also shown. Despite the viscosity of the blend being higher than neat hexadecane, the blend reduces friction in both the mixed and hydrodynamic regimes. In order to ensure the validity of this unexpected behaviour, a large number of repeat tests were carried out. These showed the reduction in hydrodynamic friction to be repeatable.

Friction coefficient versus speed for contacts lubricated with neat hexadecane, neat MAC lubricant, and 3 wt% MAC blend of MAC in hexadecane
Figure 5 shows the variation in friction coefficient with speed for a range of MAC concentrations from 0 up to 7 wt%. This shows that the optimum concentration of MAC is ~3 wt%, which reduces friction at 15000 rpm from ~0.5 to ~0.3 compared to neat hexadecane. Lower concentrations of MAC reduce the hydrodynamic friction to a lesser extent and for 0.5 wt%, the change in the hydrodynamic friction is negligible. As the concentration of MAC is increased above ~3 wt%, hydrodynamic friction begins to rise. This increase in friction with viscosity (which is in agreement with hydrodynamic theory) shows that above ~3 wt%, the friction-reducing effect of the MAC is outweighed by its effect on viscosity.

Friction coefficient versus speed for contacts lubricated with hexadecane with varying percentages of MAC additive
Figure 6 shows the friction at 15,000 rpm (obtained from Fig. 5) alongside dynamic viscosity (data from Table 1), plotted against MAC concentration. Each data point shown in Fig. 6 is an average of three measurements, while the error bars represent the standard deviation of the measurements. This figure confirms the anomalous behaviour; below 4 wt%, friction falls with increasing MAC concentration while viscosity rises monotonically.

Coefficient of friction at 15,000 rpm and dynamic viscosity versus MAC concentration in hexadecane
The first question regarding this behaviour is whether it arises due to heating effects as a result of increased viscosity. To test this, a Stribeck curve was obtained using an alternative fluid with equal viscosity to that of the MAC hexadecane blend. This was achieved by mixing squalane and hexadecane (in proportions suggested by ASTM D314), to produce a viscosity of 3.3 cP (close to that of the 3 wt% MAC in hexadecane). The results from a test on this blend are shown in Fig. 7. It is evident that the addition of squalane to hexadecane causes an increase in hydrodynamic friction (in contrast to the MAC, which reduces friction). Therefore, it is not simply an increase in lubricant viscosity that is causing the anomalous reduction in friction; some other property of the MAC is responsible.

Friction coefficient versus speed for neat hexadecane and a 3.3 cP blend of squalane and hexadecane
3.2 Compound Blend of Hexadecane with Octadecylamine and MAC
A series of tests was carried out to establish whether the anomalous reduction in friction resulted from phenomena occurring close to the silicon surface or within the bulk of the lubricant. In these tests, octadecylamine (ODA) was blended with the hexadecane–MAC blend. ODA has been shown previously to act as a friction modifier additive that forms a boundary film on silica surfaces and reduces friction at low speeds [18]. Since ODA is surface-active, its inclusion in the hexadecane–MAC blend is intended as a probe to ascertain whether the anomalous reduction in hydrodynamic friction can be attributed to occurrences on the surfaces or within the bulk of the fluid.
Figure 8 shows the friction variation with speed for four fluids based on hexadecane: (i) neat hexadecane, (ii) hexadecane with 0.1 wt% ODA, (iii) hexadecane with 2 wt% MAC (iv) hexadecane with 0.1 wt% ODA and 2 wt% MAC.

Friction coefficient versus speed for individual blends of octadecylamine and MAC (2 wt%) with hexadecane, and a compound blend of all three liquids
As expected, the presence of ODA alone in hexadecane reduces boundary friction significantly (from ~0.2 to <0.1), while the presence of the MAC alone reduces hydrodynamic friction. However, the friction reductions associated with these two additives are diminished when a blend of hexadecane MAC and ODA is used. This suggests that the friction-reducing mechanisms associated with the MAC and the ODA are competing with each other. Since the ODA is known to be surface-active, it is probable that the friction-reducing MAC behaviour is a phenomenon that also occurs close to or at the silicon surface.
It should be noted that there is a slight difference between friction values shown in Fig. 8 and those observed in previous work [18]. This can be attributed to the different pad geometry used here (as defined in Fig. 1), compared to that employed previously.
A series of tests were then carried on compound blends where the concentrations of the MAC and ODA components were varied independently. The most effective blend in reducing friction in both the boundary and hydrodynamic regime consisted of hexadecane with 0.1 wt% ODA and 1 wt% MAC. The Stribeck curve for this blend is shown in Fig. 9. It can be seen that the addition of ODA and MAC to hexadecane acts reduce both boundary and hydrodynamic friction.

Friction versus speed for contacts lubricated with pure hexadecane, hexadecane with 0.1 wt% octadecylamine, and a compound blend of hexadecane with 0.1 wt% octadecylamine and 1 wt% MAC
3.3 Squalane with MAC
Hexadecane is a linear molecule, which, as previous studies have shown, has the propensity of exhibit liquid slip behaviour at very smooth, oleophobic surfaces [23, 25].
In order to establish whether the MAC additive reduces friction when blended with a hydrocarbon base fluid that is non-linear in structure, the following test was carried out. Friction versus speed curves were obtained for the MEMS contact lubricated with both neat squalane and squalane blended with 2 wt% MAC. As shown by Fig. 10, the addition of 2 wt% MAC in squalane has negligible effect on friction, when compared to neat squalane. It should be noted that the viscosity of the 2 wt% MAC solution in squalane was very similar to that of neat squalane.

Friction coefficient versus speed for neat squalane and squalane blended with 2 wt% MAC
3.4 Possible Origins of the Observed Friction Reduction
This reduction in friction that occurs together with an increase in fluid viscosity is clearly contrary to conventional Reynolds’ theory, which suggests that hydrodynamic friction μ is related to dynamic viscosity η by
where U is the entrainment speed (half the sliding speed in the contacts studied) and W is the load.
A tentative explanation for this behaviour is that a film of MAC forms on the silicon specimens, which causes the liquid to slip (rather than shear) close to one or both surfaces. This would result in a reduction in the shear stress at the surface and hence reduce hydrodynamic friction. Although there is nothing in the chemical composition of either di- or tri-(2-octyldodecyl)-cyclopentane (both unsaturated hydrocarbon molecules) to suggest its attraction to silica surfaces, a number of observations suggest that such a film is formed.
First, the addition of octadecylamine (ODA) to the blend inhibits MAC friction reduction. Since ODA is surface active on silica [18], this suggests the friction-reducing mechanism of the MAC occurs close to the silica surfaces. Furthermore, no corresponding friction reduction was observed when the MAC was blended with a squalane base fluid. This observation suggests the occurrence of slip, since slip should occur more readily with hexadecane (a linear molecule) than squalane (a branched molecule), due to the ability of molecules of the former to orientate themselves to form an ordered layer. Similar to previous research [23–26], the formation of an ordered film may be promoted by the smooth nature (~0.5 nm Ra) of the silicon surfaces.
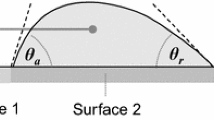
It has also been shown that slip generally occurs when liquids do not strongly wet the surfaces they are moving against [23–26]. In order to study the wetting behaviour of the liquids and surfaces used in this study, a number of contact angle measurements were made. The results from these are shown in Table 2. Here, it can be seen that neat hexadecane and the hexadecane–MAC blend wet the surface of the silicon specimens. However, the surface has been coated with MAC prior to measurement, the contact angle increases from ~0 to 23°, showing that wetting is reduced. If a similar non-wetting MAC layer is formed on the specimen surfaces during the test, it is possible that this contributes slip.
It should be noted that the MAC-coating used for contact angle measurement was produced by spreading a solution of 0.4 wt% MAC in hexane onto a silicon wafer before allowing the hexane to evaporate (this approach was necessary since neat MAC does not wet silica surfaces).
Inspection of Fig. 4 shows that the presence of MAC in the fluid has the effect of reducing friction in the mixed regime (occurring from approximately 100–1,000 RPM) as well as in the hydrodynamic regime. The reduction in mixed friction that occurs with the MAC blend has the effect of shifting the Stribeck curve to the left. This type of reduction in mixed friction has previously been attributed to the formation of a viscous boundary layer, which increases fluid entrainment at intermediate speeds. For example viscous, fluid-like boundary films have been shown to occur in metal–metal elastohydrodynamic contacts, for solutions of polar viscosity index improver (VII) polymers in mineral oils [31]. Here, at low speed when the fluid film thickness is less than that of the adsorbed polymer film, the fluid at the inlet is of higher viscosity that the bulk of the fluid. In contrast to this previous work, the observed behaviour occurs in conformal, silicon contact, and the reduction in friction persists into the hydrodynamic regime.
It is interesting to note that the optimum concentration of MAC in hexadecane (~3 wt%) is significantly higher than the typical concentrations used for lubricant additives. The reason for this is not entirely clear, but may suggest that the MAC forms a layer several molecules in thickness.
4 Conclusion
-
Previous research has shown that liquid lubrication is an effective means of controlling friction in MEMS applications. In order to further improve this approach, it is necessary to reduce hydrodynamic friction since this will allow the use of high viscosity fluids with lower volatility.
-
In this study a miniature, silicon, thrust pad bearing has been used to show that a blend of a di- and tri-(2-octyldodecyl)-cyclopentane in solution in hexadecane gives lower friction in both the mixed and hydrodynamic regimes compared to neat hexadecane. Since the MAC has a higher viscosity than hexadecane, this reduction in hydrodynamic friction is contrary to conventional Reynolds’ lubrication theory.
-
A number of observations suggest that this reduction in friction results from a MAC film forming on the silicon surfaces that causes the fluid to undergo slip against the surfaces.
-
This behaviour has implication for the lubrication of MEMS devices involving smooth silicon surfaces sliding under low load, since it may make liquid lubrication a more feasible means of controlling friction.
References
Syms, R.R.A., Zou, H., Stagg, J., Veladi, H.: Sliding-blade MEMS iris and variable optical attenuator. J. Micromech. Microeng. 14(12), 1700 (2004)
Girbau, D., Pradell, L., Lazaro, A., Nebot, A.: Electrothermally actuated RF MEMS switches suspended on a low-resistivity substrate. J. Microelectromech. Syst. 16(5), 1061–1070 (2007)
Chau, K.H.L., Sulouff, R.E.: Technology for the high-volume manufacturing of integrated surface-micromachined accelerometer products. Microelectron. J. (Inc. J. Semicust. ICs) 29(9), 579–586 (1998)
Velten, T., Ruf, H.H., Barrow, D., Aspragathos, N., Lazarou, P., Erik, J., Malek, C.K., Richter, M., Kruckow, J., Wackerle, M.: Packaging of bio-MEMS: strategies, technologies, and applications. IEEE Trans. Adv. Packag. 28(4), 533–546 (2005)
Kim, S.H., Asay, D.B., Dugger, M.T.: Nanotribology and MEMS. Nano Today 2(5), 22–29 (2007)
Maboudian, R., Ashurst, W.R., Carraro, C.: Self-assembled monolayers as anti-stiction coatings for MEMS: characteristics and recent developments. Sens. Actuators A Phys. 82(1–3), 219–223 (2000)
Srinivasan, U., Foster, J.D., Habib, U., Howe, R.T., Maboudian, R., Senft, D.C., Dugger, M.T.: Lubrication of polysilicon micromechanisms with self-assembled monolayers. In: Conference on Solid State Sensor and Actuator Workshop, Hilton Head, 1 Jun 1998
Srinivasan, U., Houston, M.R., Rowe, R.T., Maboudian, R.: Self-assembled fluorocarbon films for enhanced stiction reduction. In: International Conference on Solid State Sensors and Actuators, TRANSDUCERS, Chicago (1997)
Smallwood, S.A., Eapen, K.C., Patton, S.T., Zabinski, J.S.: Performance results of MEMS coated with a conformal DLC. Wear 260(11‚Äì12), 1179–1189 (2006)
Tagawa, M., Ikemura, M., Nakayama, Y., Ohmae, N.: Effect of water adsorption on microtribological properties of hydrogenated diamond-like carbon films. Tribol. Lett. 17(3), 575–580 (2004)
Houston, M.R., Howe, R.T., Maboudian, R.: Effect of hydrogen termination on the work of adhesion between rough polycrystalline silicon surfaces. J. Appl. Phys. 81(8), 3474–3483 (1997)
Asay, D., Dugger, M., Kim, S.: In situ vapor-phase lubrication of MEMS. Tribol. Lett. 29(1), 67–74 (2008)
Ashurst, W.R., Carraro, C., Maboudian, R.: Vapor phase anti-stiction coatings for MEMS. IEEE Trans. Device Mater. Reliab. 3(4), 173–178 (2003)
Potter, C.N.: Hermetic MEMS package and method of manufacture. U.S. Patent No. 7,358,106 B22005. Stellar MicroDevices, Inc., Austin
Asay, D.B., Dugger, M.T., Ohlhausen, J.A., Kim, S.H.: Macro- to nanoscale wear prevention via molecular adsorption. Langmuir 24(1), 155–159 (2007)
Ku, I.S.Y., Reddyhoff, T., Holmes, A.S., Spikes, H.A.: Wear of silicon surfaces in MEMS. Wear 271(7–8), 1050–1058 (2011)
Ku, I.S.Y., Reddyhoff, T., Wayte, R., Choo, J.H., Holmes, A.S., Spikes, H.A.: Lubrication of microelectromechanical devices using liquids of different viscosities. J. Tribol. 134(1), 012002–012007 (2012)
Reddyhoff, T., Ku, I., Holmes, A., Spikes, H.: Friction modifier behaviour in lubricated MEMS devices. Tribol. Lett. 41(1), 239–246 (2011)
Keren, D., Ramanathan, G.P., Mehregany, M.: Micromotor dynamics in lubricating fluids. J. Micromech. Microeng. 4(4), 266 (1994)
Mehregany, M., Dhuler, V.R.: Operation of electrostatic micromotors in liquid environments. J. Micromech. Microeng. 2(1), 1 (1992)
Spikes, H.A.: The half-wetted bearing. Part 1: extended Reynolds equation. Proc. Inst. Mech. Eng. J. Eng. Tribol. 217(1), 1–14 (2003)
Spikes, H.A.: The half-wetted bearing. Part 2: potential application in low load contacts. Proc. Inst. Mech. Eng. J. Eng. Tribol. 217(1), 15–26 (2003)
Choo, J.H., Glovnea, R.P., Forrest, A.K., Spikes, H.A.: A low friction bearing based on liquid slip at the wall. J. Tribol. 129(3), 611–620 (2007)
Choo, J.-H., Forrest, A., Spikes, H.: Influence of organic friction modifier on liquid slip: a new mechanism of organic friction modifier action. Tribol. Lett. 27(2), 239–244 (2007)
Pit, R., Hervet, H., Léger, L.: Direct experimental evidence of slip in hexadecane: solid interfaces. Phys. Rev. Lett. 85(5), 980–983 (2000)
Zhu, Y., Granick, S.: Rate-dependent slip of newtonian liquid at smooth surfaces. Phys. Rev. Lett. 87(9), 096105 (2001)
Venier, C.G., Casserly, E.W.: Multiply-alkylated cyclopentanes (MACs): a new class of synthesized hydrocarbon fluids. Lubr. Eng. 47(7), 586–591 (1991)
Peterangelo, S.C., Gschwender, L., Snyder, C.E., Jones, W.R., Nguyen, Q., Jansen, M.J.: Improved additives for multiply alkylated cyclopentane-based lubricants. J. Synth. Lubr. 25(1), 31–41 (2008)
Dube, M.J., Bollea, D., Jones, W.R., Marchetti, M., Jansen, M.J.: A new synthetic hydrocarbon liquid lubricant for space applications. Tribol. Lett. 15(1), 3–8 (2003)
Ku, I.S.Y., Reddyhoff, T., Choo, J.H., Holmes, A.S., Spikes, H.A.: A novel tribometer for the measurement of friction in MEMS. Tribol. Int. 43(5–6), 1087–1090 (2010)
Smeeth, M., Spikes, H., Gunsel, S.: Boundary film formation by viscosity index improvers. Tribol. Trans. 39(3), 726–734 (1996)
Acknowledgments
This research was supported by the Singapore National Research Foundation under its Competitive Research Program (Award Number: NRF-CRP 2-2007-04). The views expressed herein are those of the authors and are not necessarily those of the Singapore National Research Foundation.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Leong, J.Y., Reddyhoff, T., Sinha, S.K. et al. Hydrodynamic Friction Reduction in a MAC–Hexadecane Lubricated MEMS Contact. Tribol Lett 49, 217–225 (2013). https://doi.org/10.1007/s11249-012-0056-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11249-012-0056-z