
Results are presented for computational experiments on the determination of the mechanisms for the generation of vibrations in a discrete model of the tuning fork specimen in the presence of a closing fatigue crack in one of the rods. The plots are constructed that show the influence of the crack parameters on the vibration of the object under investigation.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction. During their operation, numerous structural elements of machines, such as turbine rotor blades, are subjected to mechanical and temperature loads, impact of foreign bodies (dust, ice, birds, etc.) resulting in the occurrence of damage that can be classified into two groups. The first group includes damages such as dimples, dents, non-closing cracks which cause no essential change in the elastic-inertial characteristics of the object of investigation during the cycle of its deformation for different types of vibrations. Closing cracks, or the so-called “breathing” fatigue cracks, as a typical example of the second group of damages, in contrary, give rise to a change in the above characteristics being the cause of the nonlinearity of vibrations. Recently, a great attention has been paid to studying vibrations of objects of engineering with a closing fatigue crack. This is evidenced, in particular, by investigations [1–12] mainly aimed at studying vibrations of an individual structural element, such as a rod [1–3, 6–9], plate [10] or a blade [11, 12].
However, in view of the presence of various constraints between components of machine assemblies, which is typical of them, the separate consideration of a structural element does not allow one to describe its dynamic state with sufficient accuracy. This is only possible by taking into account its interaction with other elements of the system under investigation. Therefore, in the theory of vibrations, increasingly greater attention is being paid to studying complex mechanical systems, among which regular systems involving series or parallel connection of equitype elements (subsystems) occupy a special place. Among such systems are primarily a set of blades and blade assembly as a special type of regular systems with rotation symmetry.
Results of the literature review show that studies on the vibrations of the considered systems with damages such as fatigue cracks are limited in number. Noteworthy here are only the studies involving the computational and experimental investigation on the influence of an edge non-closing crack on the vibrations of a regular system such as a tuning fork specimen acting as a linear system [13] and also the numerical investigation on the vibrations in a model of the turbomachine blade assembly with this kind of damage [14, 15].
Considering the above-said, the goal of the present work is the numerical investigation on the influence of the closing fatigue crack parameters on the generation of vibrations in the simplest regular system consisting of two equitype elements simulating a set of two blades.
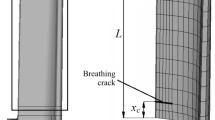
Object of Investigation and Its Modeling. To solve the problem, a tuning fork specimen was chosen with an edge mode I crack in one of the rods (Fig. 1). This choice was due to the fact that vibrations of such system in the absence of the damage or in the presence of a non-closing crack, as noted above, were studied quite well, which allows one to compare the obtained results of investigations with the known ones.

Tuning fork specimen.
In accordance with the problem statement, at the first step of its solution, it is necessary to choose the computational model of the object under investigation. In the study of vibrations of rod elements with a fatigue crack, a system with one degree of freedom (Fig. 2a) is the simplest and most widely used model [16] of them. In the case of relative small dimensions of the crack, a certain difference in the mode of vibration of the rod with an open and closed crack at half-cycles of its deformation can be neglected. Such model allows one to describe – with a sufficient degree of reliability – the dynamic behavior of an isolated rod with the damage under consideration during its vibration in one of possible natural modes. Therefore, for the specimen under investigation, in the presence of a fatigue crack in one of its constituent rods, in this case in the first rod, with the account taken of their elastic coupling, a discrete model was chosen (Fig. 2b). For a more clear-cut understanding of the influence of a crack on the system vibration, a strictly regular system was adopted as its initial undamaged state, a system for which the reduced masses (m 1 and m 2), stiffness coefficients (k 1 and k 2, where k 1 = k op + k P ) and viscous friction (c 1 and c 2) of the subsystems are equal, i.e., m 1 = m 2 = m, k 1 = k 2 = k, c 1 = c 2 = c, where k op is the stiffness coefficient of the rod with an open crack (in this case, for u > 0).

Discrete models of the isolated rod (a) and the tuning-fork specimen (b) with a fatigue crack.
Supposing that the damage type under consideration changes only the elastic properties of the rod during its cyclic deformation, the forced vibrations of the chosen discrete model of the specimen with the lumped harmonic force P(t) = P 0 cos νt acting on one of the rods and with consideration of the viscous resistance, can be described by the following non-linear set of differential equations:
where h is the damping coefficient, h = c/2m, p is the natural frequency of vibration of the undamaged subsystem, \( p=\sqrt{{{k \left/ {m} \right.}}} \), γ = k s /k, k s is the elastic coupling stiffness of the rods, q 0 = P 0/m, u j is the displacement of the mass m j with respect to the stable equilibrium, and α is the parameter integrally defining the relative change in stiffness of the rod in the presence of an open crack [16] which in this case for the damaged rod (j = 1) is determined by the formula:
For γ ≡ 0, we obtain a set of disconnected differential equations describing vibrations of each of the rods of the specimen as an isolated subsystem.
Main Steps of the Algorithm for Solving the Problem and Its Validity Verification. The solution of the set of differential equations (1) describing the forced vibration of the tuning fork specimen model (Fig. 2b) and the differential equation [the first equation of set (1) for γ ≡ 0] describing the forced vibrations of the isolated rod (Fig. 2a) with a closing fatigue crack was carried out using the Runge-Kutta methods with an automatic selection of the step having the fourth order of accuracy [17] and the averaging over accelerations [18].
The system nonlinearity caused by the presence of a closing fatigue crack under the action of the forcing harmonic force manifests itself in the excitation of sub- and superresonant modes. As shown in [16], the ratio of the amplitudes of the second harmonic of vibration A (2) to those of the first harmonic of vibration A (1), i.e., κ2 = A (2)/A (1), at the second order superharmonic resonance (ν = 0.5 p r ) and the ratio of the amplitudes of the first harmonic of vibration A (1) to those of the second harmonic of vibration A (2), i.e., κ1 = A (1)/A (2), at the half-order subharmonic resonance (ν = 2 p r ), where p r is the main resonant vibration frequency of the system, may be considered as a more representative vibration diagnostic parameter indicating the presence of a crack. Therefore, these are the above amplitudes of the components of the harmonics of vibration and their ratios that were determined during the computational experiments.
The testing of the developed algorithm for solving equations (1) was performed using, as an example, the analysis of the forced vibrations of the model of an isolated rod with a closing fatigue crack at a subharmonic resonance. All the computations were carried out at the natural frequency of the undamaged rod p = 1 s−1 and under the action of the forcing harmonic force with relative amplitude q 0 = 1 N⋅s2.
Figure 3 illustrates the time dependence of change in the displacement u of the mass m for h = 0.0008 s−1 and α = 0.1 in a subharmonic (ν = 2 p r ) vibration mode. The similar calculations were also carried out for other values of h. The analysis of the obtained computation results shows that the steady-state regime of the studied system vibration, which, from the practical standpoint, is of the greatest interest in the study of vibration of the objects under consideration, occurs after the expiration of some time, in this case, 4000 s.

Example of numerical determination of the time (t) dependence of change in the displacement u of the mass m in the model of the isolated rod with a closing fatigue crack.
The following step of the problem solving algorithm is the characterization of the steady-state forced vibration. To process the obtained dependences u(t), the fast Fourier transformation (FFT) was used according to which the set of the values to be processed should be multiple of 2n, where n is the integer, and the number of periods of the indicated function is at least three. In the present case, this was reached by way of interpolation of the dependence u(t) corresponding to the mode of steady-state forced vibration and representation of its 12 periods as 8192 points.
The computational experiments were performed on the determination of the dependence of the vibration diagnostic parameter κ1 at a subharmonic resonance on the nonlinearity characteristic α of a discrete model of the isolated rod. To provide the comparison between the obtained results and the data given in [16], the computations were performed with the values of the damping coefficient h equal to 0.0008, 0.0016, and 0.0032 s−1 and the variation in the parameter α as a fatigue crack characteristic from 0 to 0.277.
As an example, Fig. 4 presents the computation results obtained using the Runge-Kutta methods and their averaging over accelerations. This figure also presents the data given in [16]. It is seen that the values of the vibration diagnostic parameter κ1 obtained using these methods agree well with those given in [16], which is indicative of the validity of the developed algorithm. Considering this, all further investigations on the vibration of the chosen discrete model of the tuning fork specimen were carried out using the Runge-Kutta methods.

Values of the vibration diagnostic parameters κ1 (symbols) and its dependence (lines) on the nonlinearity characteristic α of a discrete model of the isolated rod at a subharmonic resonance: (□) according to the Runge-Kutta methods; (■, solid line) for the method of averaging over accelerations; (○, dashed line) for the data given in [16].
Influence of the Fatigue Crack Parameters on the Generation of Vibrations in a Regular System. A complex series of experiments was performed on the assessment of the influence of fatigue crack parameters on the mechanisms for the vibration of a discrete model of the tuning fork specimen (Fig. 2b). All computations were carried out for the same parameters defining the fatigue crack, energy dissipation and excitation of vibrations as for the isolated rod. This is a necessary prerequisite for the comparison of the obtained results.
As known, two vibration modes, namely, in-phase and anti-phase modes are typical of a tuning fork specimen with a violation of its regularity even in the in-phase excitation. Therefore, for the amplitudes of harmonics in terms of resonance vibration excitation in the rods of the specimen with a fatigue crack, we introduce the notation \( A_j^{{\left( {iq} \right)}} \), where i = 1, 2 is the number of the vibration harmonic, q = I, II is the vibration mode of the specimen (I is the in-phase mode and II is the anti-phase mode), j = 1 for the damaged rod, and j = 2 for the undamaged rod. Further, we will use the relative amplitudes of vibrations \( \bar{A}_j^{{\left( {iq} \right)}}={{{A_j^{{\left( {iq} \right)}}}} \left/ {{{A_r}}} \right.} \), where A r is the resonant vibration amplitude of the rods in the specimen in case of its strong regularity.
Consider the results of computational experiments obtained with the stiffness coefficient k s of the elastic coupling between the subsystems equal to 0.015k for the case of the main and subharmonic resonances.
Main Resonance \( \left( {\upnu =p_r^{(q) }} \right) \). The Fourier transformation of displacements of the masses in a discrete model of the tuning fork specimen was carried out according to the developed algorithm, from which the spectrum of vibration amplitudes was determined. The analysis of the latter showed that at the excitation under consideration, the amplitudes of the higher harmonics are considerably lower than those of the main one. Thus, at α = 0.02, the value of the amplitude ratio κ2 at the main resonance is equal to 0.0014, which agrees with the results of calculating the vibrations of a discrete model of the isolated rod with a closing crack [20] and is indicative of a low level of information content – in this case, a low level of its significance as a vibration diagnostic parameter. However, the presence of the second harmonic gives rise to the possibility of the excitation of subharmonic resonances of order 1/s (s = 2, 4, … ).
Consider the influence of the closing crack parameters on the amplitudes of the first harmonic of oscillations of the subsystems in the model of the tuning fork specimen. The plots of the relative amplitudes \( \bar{A}_j^{{\left( {1q} \right)}} \) of the subsystem vibrations versus the nonlinearity parameter α were constructed. As an example, Fig. 5 illustrates the above dependence for h = 0.0016 s−1. For the purposes of comparison, the same figure presents this dependence for the model of the isolated damaged rod. The analysis of the dependences, firstly, testifies that the level of resonance amplitudes of the damaged rod for the in-phase vibration mode of the tuning fork specimen is higher than that of the damaged rod in an isolated state. An inverse effect is observed for the anti-phase vibration mode. Secondly, as for the isolated rod, the higher harmonics in the spectrum of vibration amplitudes are very small at the main resonance. This means that for the mode of vibration under consideration, the system nonlinearity due to a closing fatigue crack, does not influence the distribution of the resonant vibration amplitudes. This conclusion is confirmed by the calculation results for the resonance vibrations in the considered system with an open crack presented in Fig. 6. Thirdly, the given dependences coincide qualitatively with those obtained for the tuning fork specimen due to the frequency mismatch in the rods caused by both the manufacturing tolerances [19] and the presence of the damage such as a dent [13].

Dependence of the relative resonant amplitudes of the first harmonic for the damaged (open symbols) and undamaged (solid symbols) subsystems on the nonlinearity characteristic α under the in-phase (solid lines) and anti-phase (dashed lines) vibration modes of the tuning fork specimen model at h = 0.0016 s−1. (The dot-and-dash line is for the model of the damaged rod in an isolated state.)

Dependence of relative resonant amplitudes of the first harmonic for the damaged subsystem on the frequency mismatch in the in-phase (open symbols) and anti-phase (solid symbols) vibration modes of the tuning fork specimen model with an open (dashed lines) and closing (solid lines) crack.
Since the frequency mismatch of the equitype elements is the most frequently used characteristic for the loss of regularity in systems, we consider the variation in the resonant vibration amplitudes in the studied model of the tuning fork specimen in the presence of both a closing and an open crack depending on the frequency mismatch \( \Delta p=\frac{{\left| {{p_1}-p} \right|}}{p}\cdot 100\% \) between vibrations of the rods, where \( {p_1}=\sqrt{{{{{{k_{op }}}} \left/ {m} \right.}}} \) is the natural vibration frequency of the rod with an open fatigue crack that is dependent on the parameter α determined by the formulas given in [7]. The obtained dependences of the relative amplitudes \( \bar{A}_1^{{\left( {1q} \right)}} \) of the subsystem simulating a damaged rod of the system, which determines its maximum vibration intensity under the in-phase vibration mode due to the frequency mismatch Δp, are presented in Fig. 6. As is seen, with an open crack, an extremum on the above dependences takes place for the frequency mismatch that is smaller than in the case of a closing crack. However, the extreme values of the resonant vibration amplitudes do not change.
Subharmonic Resonance \( \left( {\upnu =2p_r^{(q) }} \right) \). As was noted above, the ratio of the amplitudes of the first harmonic of vibration to those of the second one κ1 at the subharmonic resonance is the most representative vibration diagnostic parameter indicating the presence of a crack for a discrete model of the isolated rod. Considering that for a tuning fork specimen, with the violation of its regularity, two vibration modes are excited, we introduce the notation \( \upkappa_{1j}^{(q) }={{{A_j^{{\left( {1q} \right)}}}} \left/ {{A_j^{{\left( {2q} \right)}}}} \right.} \) for the above vibration diagnostic parameter.
Based on the performed calculations, the plots of the vibration diagnostic parameter \( \upkappa_{1j}^{(q) } \) versus the non-linearity characteristic α were constructed for a discrete model of the tuning fork specimen (Fig. 2b). Figure 7 presents the above plots for the regular system under investigation and the model of the damaged rod in an isolated state in the in-phase vibration mode (q = I). It is seen that the character of the dependence of the vibration diagnostic parameter of the subsystem simulating a damaged rod of the tuning fork specimen does not change as compared to that for the model of the rod in an isolated state. However, in this case, its value is somewhat decreased due to the elastic coupling of the specimen rods. The presence of the second harmonic in the spectrum of the vibration amplitudes for the undamaged rod is also caused by the elastic coupling of the rods, although the value of the vibration diagnostic parameter is considerably lower (in this case, by a factor of six) than for the undamaged one.

Dependence of the vibration diagnostic parameter \( \upkappa_{1j}^{{\left( \mathrm{I} \right)}} \) on α for the damaged (□) and undamaged (■) subsystems of the tuning fork specimen model at subresonance for h = 0.0008 s−1 and k s = 0.015k. (Dot-and-dash line is for the model of the damaged rod in an isolated state; (△, ▲) values of the vibration diagnostic parameter for the damaged and undamaged subsystems, respectively, for k s = 0.03k.)
To determine the influence of the elastic coupling of the rods on the vibration diagnostic parameter \( \upkappa_{1j}^{(q) } \), computations were also carried out with other values of k s . As an example, Fig. 7 shows the data for α = 0.1 with k s = 0.03k. It is seen that with an increase in the stiffness coefficient k s of the elastic coupling, the value of the vibration diagnostic parameter for the damaged rod decreases, whereas for the undamaged one it increases, i.e., the ratio of its values’ changes. Thus, for k s = 0.015k, the ratio \( {{{\kappa_{11}^{{\left( \mathrm{I} \right)}}}} \left/ {{\kappa_{12}^{{\left( \mathrm{I} \right)}}}} \right.}\approx 3.7 \), whereas for k s = 0.03k it is 1.85.
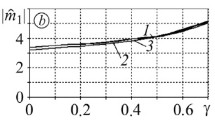
The effect of the energy dissipation on the value of the vibration diagnostic parameter of the undamaged rod is illustrated by its dependences on the nolinearity parameter obtained for different values of the damping coefficient h (Fig. 8). As is seen, the character of the dependences remains the same with varying level of energy dissipation of the system, however with the growing h, the value of the vibration diagnostic parameter decreases.

Dependence of the vibration diagnostic parameter of the tuning fork specimen model for the damaged rod on α at sub-resonance and for different values of the damping coefficient h: (1) h = 0.0008 s−1; (2) h = 0.0016 s−1; (3) h = 0.0032 s−1.
In the anti-phase mode of the subsystem vibration, for the considered mode of excitation in the spectrum of the amplitudes of rod vibrations, the first and second harmonics also take place but they are not meaningful, and, thus, cannot be considered useful for damage diagnostics.
Conclusions
-
1.
At the main resonance, the character of influence of the non-linearity parameter on the main harmonic amplitudes of the tuning fork specimen model coincides qualititatively with that obtained for the case of frequency mismatch of the rods due to both their manufacturing tolerances and the presence of damage such as a dent or an open crack.
-
2.
At the subharmonic resonance, as in the case of the isolated rod, the ratio of the amplitudes of the first and second harmonics of vibration of the rods in the in-phase vibration mode of the system, in contrast to the anti-phase one when the amplitudes of the harmonics are not meaningful, can be used as a vibration diagnostic parameter indicating the presence of a closing fatigue crack in the tuning fork specimen. Due to the presence of the elastic coupling of the rods, the value of the vibration diagnostic parameter for the damaged rod is lower than for the rod in an isolated state. With an increase in the stiffness coefficient of the elastic coupling, this value decreases for the damaged rod, whereas it increases for the undamaged one. With an increase in the energy dissipation in the system, the value of the vibration diagnostic parameter also decreases.
References
V. V. Matveev and A. P. Bovsunovskii, “Efficiency of the method of spectral vibrodiagnostics for fatigue damage of structural elements. Part 4. Analysis of distortion of harmonicity of vibration cycle of beams with closing transverse cracks,” Strength Mater., 32, No. 1, 1–6 (2000).
V. V. Matveev and A. P. Bovsunovskii, “On determination of vibration characteristics of a beam with a closing crack in bending vibrations,” Strength Mater., 32, No. 3, 211–224 (2000).
S. L. Tsyfanskii, M. A. Magone, and V. M. Ozhyganov, “On the use of non-linear effects to detect cracks in rod-like structural elements,” Defektoscopiya, No. 3, 77–82 (1985).
N. P. Plakhtienko and S. A. Yasinskii, “Resonance of second order in vibrations of a beam containing a transverse crack,” Strength Mater., 27, No. 3, 146–152
M. Krawczuk and W. Ostachowicz, “Damage indicators for diagnostic of fatigue cracks in structures by vibration measurements – a survey,” J. Theor. Appl. Mech., 34, No. 2, 307–326 (1996).
V. V. Matveev and O. E. Boginich, “Approximate analytical determination of vibrodiagnostic parameters of the presence of a crack in an elastic body under superharmonic resonance,” Strength Mater., 42, No. 4, 363–373 (2010).
V. V. Matveev, O. E. Boginich, and A. P. Yakovlev, “Approximate analytical method for determining the vibration-diagnostic parameter indicating the presence of a crack in a distributed-parameter elastic system at super- and subharmonic resonances,” Strength Mater., 42, No. 5, 528–543 (2010).
V. V. Matveev, O. E. Boginich, and A. P. Yakovlev, “Approximate methods and results of determining the vibration diagnostic parameters indicating the presence of a crack in rod-like elements at the super- and subharmonic resonances,” in: Proc. Int. Sci. Conf. on the Strength of Materials and Structural Elements [in Russian], Pisarenko Institue of Problems of Strength, National Academy of Sciences of Ukraine, Kiev (2011), pp. 59–77.
V. M. Chushko, “Dependence of the frequency of natural vibration of the rod on the size of a crack therein,” in: Strength of Materials and Structural Elements at Sonic and Ultrasonic Frequencies of Loading [in Russian], Naukova Dumka, Kiev (1983), pp. 249–253.
Yu. A. Lymarenko, “Influence of the damage on the dynamic macrocharacteristics of the stress-strain state of products,” Nov. Mater. Technol. Metallurgy Mach. Build., No. 1, 114–118 (2008).
I. G. Tokar’, A. P. Bovsunovskii, and I. V. Drokin, “Analysis of the vibration characteristics of blades with fatigue cracks using the methods of numerical processing of test data,” Vibr. Tekhn. Tekhnol., No. 6, 62–64 (2004).
Yu. S. Vorob’ev, V. N. Romanenko, E. V. Tishkovets, and M. A. Storozhenko, “Vibration of damaged turbine blades,” Vibr. Tekhn. Tekhnol., No. 5, 47–51 (2004).
I. G. Tokar’ and A. P. Zinkovskii, “Influence of the parameters of a local defect in a regular system on the range of eigenfrequencies of vibrations and the level of vibration stresses in elements of the same type,” Strength Mater., 42, No. 2, 167–174 (2010).
B.-W. Huang and J.-H. Kuang, “Variation in the stability of a rotating blade-disk with a local crack defect,” J. Sound Vibr., 294, No. 3, 486–502 (2006).
Yu. S. Vorob’ev, R. Zhondkovskii, and M. A. Chugai, “Special features of vibration of damaged blading elements,” Aviats.-Kosm. Tekhn. Tekhnol., No. 9, 98–101 (2008).
V. V. Matveev and O. A. Bovsunovskii, “Approximate analytical determination of vibrodiagnostic parameters of a cracked elastic body under subharmonic resonance. Part 2. Strong resonance,” Strength Mater., 40, No. 3, 283–291 (2008).
A. E. Mudrov, Numerical Methods for PC in Pascal, Fortran, and Basic [in Russian], Rasko, Tomsk (1991).
S. P. Timoshenko, D. H. Young, and W. Weaver, Vibration Problems in Engineering, Wiley (1974).
A. Ya. Adamenko, I. G. Tokar’, A. P. Zin’kovskii, and V. V. Matveev, “Damping capacity of rods in a centrifugal-force field,” Strength Mater., 15, No. 8, 1144–1149 (1983).
V. V. Matveev and O. E. Boginich, “Approximate determination of vibrodiagnostic parameter of nonlinearity for an elastic body due to the presence of a breathing crack at a subharmonic resonance,” Strength Mater., 44, No. 3, 250–258 (2012).
Acknowledgments
The authors express their sincere gratitude to Prof. V. V. Matveev, Academician of the National Academy of Sciences of Ukraine, for his support and valuable advices given during the discussion of the results of the work.
Author information
Authors and Affiliations
Additional information
Translated from Problemy Prochnosti, No. 3, pp. 75 – 85, May – June, 2013.
Rights and permissions
About this article
Cite this article
Kruts, V.A., Zinkovskii, A.P. & Sinenko, E.A. Influence of a Fatigue Crack on the Vibrations of the Simplest Regular Elastic System. Strength Mater 45, 308–315 (2013). https://doi.org/10.1007/s11223-013-9460-3
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11223-013-9460-3