
Abstract
This paper introduces a novel method for designing of low actuation voltage, high tuning ratio electrostatic parallel plate RF MEMS variable capacitors. It is feasible to achieve ultra-high tuning ratios way beyond 1.5:1 barrier, imposed by pull-in effect, by the proposed method. The proposed method is based on spring strengthening of the structure just before the unstable region. Spring strengthening could be realized by embedding some dimples on the spring arms with the precise height. These dimples shorten the spring length when achieved to the substrate. By the proposed method, as high tuning ratios as 7.5:1 is attainable by only considering four dimple sets. The required actuation voltage for this high tuning ratio is 14.33 V which is simply achievable on-chip by charge pump circuits. Brownian noise effect is also discussed and mechanical natural frequency of the structure is calculated.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Today, according to the enormous number of applications for wireless and portable devices and systems, this research area is becoming one of the most interesting fields in engineering. The key component of wireless systems is obviously their transceiver. Based on the requirement for GHz frequencies in such applications, devices performance is more critical.
Timing and frequency control blocks are the heart of transceivers. Consequently, voltage controlled oscillator (VCO) is the building block which performs frequency control in wireless systems. VCO is an oscillator with a tunable tank circuit constructed from an inductor and a tunable capacitor called a varactor.
Important performance parameters of VCOs are phase noise and tuning ratio. Phase noise is predefined by the quality factor (Q) of the tank circuit. Solid state varactors suffer from low tuning ratio, high resistive losses and low self-resonance frequencies [1]. Having the potential of very high Q (beyond the achieved values by the solid state silicon and GaAs varactors) at micro-and mm waves and also very large RF voltage tolerance in comparison with their planar counterparts (because of their immunity from being forward biased), MEMS varactors could be very promising alternatives for current solid state planar varactors for achieving very high performance transceivers. Also, they can be easily fabricated on silicon, glass and ceramic [2, 3].
Several techniques have been established for fabrication of MEMS varactors such as electrostatic, piezoelectric, thermal and inter-digital. Although having very high tuning ratios, thermal actuated RF MEMS varactors suffer from high power consumption and long response time to control signals [4]. Piezoelectrically actuated varactors consume less power than thermal techniques but at the price of low tuning range and fabrication complexities [5]. Large capacitances and tuning ranges are attainable by inter-digital techniques. Unfortunately, this method suffers from large die area and design and fabrication difficulties [6]. Another actuation method for RF MEMS varactors is pushing a dielectric layer between two metallic layers or pushing a metallic layer into a capacitor, which both have fabrication complexities and compatibility with standard CMOS (complementary metal-oxide-semiconductor) process and power consumption problems [7].
Electrostatic MEMS varactors are mostly parallel plates, one fixed and another movable, actuated by electrostatic force applied between them. This method achieves very high Q at high frequencies up to 100 GHz with negligible power consumption [8]. Among all types of RF MEMS variable capacitors, electrostatic actuated parallel plate capacitors possess the best features such as ultra-low power consumption, simple fabrication and compatible to CMOS process and high quality factor. But unfortunately, there are some obstacles in the way of their commercialization e.g. high actuation voltage and low tuning ratio.
The reason for having very low tuning ratio of such variable capacitors is the pull-in effect as the result of intruding the movable plate into a nonlinear catastrophic region [8]. Theoretically, when the distance between the movable plate and the actuating electrode becomes two-thirds of the initial gap, the pull-in effect occurs. The pull-in effect is due to the intrinsic positive feedback in the electrostatic actuation mechanism. By applying the DC voltage source to the structure, electrostatic force is increased due to increasing of the electrical charges. Simultaneously, this force decrease the gap between two electrodes and consequently increase the capacitance. Therefore, the charges over electrodes is increased which increases the force between two plates. At 2/3 of the initial gap, the increase in the actuating force is greater than increase in restoring mechanical force and hence this positive feedback makes the structure unstable and catastrophic pull-in is occurred. This means the instant collision of the movable plate to the fixed actuating plate.
Hence, the maximum theoretical tuning ratio of such structures is less than 1.5:1. Since, environmental vibrations affect structures with loose springs which in-turns introduce Brownian noise, suspension springs are usually choosing strong for Brownian noise considerations which increase the required actuation voltage.
Lots of efforts have been reported in literature for overcoming one or both of these problems such as: puzzle like fractal system [9], using a triangular plate with asymmetric springs for preventing pull-in effect [10], utilizing of a middle plate for increasing of the tuning ratio [11], and embedding a separate actuating electrode and employing a third plate as the capacitor plate [12]. Although, those methods increase the tuning ratio to a greater value than the theoretical limit, unfortunately, they encounter problems such as fabrication complexities, high actuation voltage and/or not enough tuning ratio.
This paper proposes a novel technique for increasing the tuning ratio of RF MEMS variable capacitors by increasing the spring constant of the structure at the boundary of instability region. By the proposed technique, no theoretical limitation is remained for tuning ratio. An example of this design method is provided through the paper which shows a high tuning ratio of 7.5:1 which is very hard to be achieved even by high cost and complicated inter-digital techniques. All of the results are supported by simulation verification.
The paper is organized as follows: after an introduction in Sects. 1, 2 provides the device structure and operation. Simulation results verifying our discussions in Sect. 2 are given in Sect. 3 followed by a conclusion in Sect. 4.
2 Device Structure and Operation
As mentioned before, parallel plate electrostatic RF MEMS varactors suffer from high actuation voltage and low tuning range. Although high actuation voltages of 50 V could be provided on-chip by charge pump circuits, these high voltages are still not reliable for deep submicron CMOS technologies and could cause practical issues such as break down of the capacitors, diodes and etc. because of their very thin oxide layers [13].
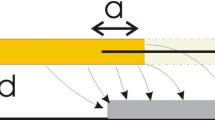
The proposed variable capacitor is designed by incidentally spring strengthening the structure for preventing the pull-in effect and reducing the actuation voltage. As conceptually shown in Fig. 1, by increasing of the applied electrostatic force, the movable plate pushes toward the pull-in boundary, but just before that critical region, the first set of embedded dimples are attached to the substrate and parallel an additional spring set with the overall spring of the structure. In this situation, the spring constant increases incidentally and one can consider the new situation as a variable capacitor with a new initial condition. This increases the tuning ratio to 2.25:1.

a Lumped model illustration of the proposed method including the effects of dimples (M is the proof mass of the plate), b conceptual representation of the described technique before reaching the dimple to the substrate, c after reaching the dimple to the substrate and engaging the second spring. (Dimples are small stems attached to precise locations of the spring with the height of 2/3 of the initial gap of each state. The dimples are designed such that increase the restoring mechanical force of the springs)
Also, some other dimples embedded on these springs which when attached to the substrate, shorten the spring length and consequently increase the spring constant of the structure.
A simple variable capacitor is designed by this method which shows a tuning ratio of 7.5:1. Figure 2 illustrates the perspective view of the structure. As shown, crab-leg springs have been employed. Spring constant of the crab-leg shaped springs could be calculated by [14]:
where t is the thickness of the beam, and E and υ are Young modulus and Poisson ratio of the structural material, respectively. All the other parameters are shown in Fig. 3. Springs are designed so that Brownian noise effects are considered which is given by [15]:
where A is the area of the capacitors’ plate, d0 is the initial gap, β=110.33 K, T is temperature in Kelvin, kB is the Boltzmann’s constant, Q is the quality factor and ω0 is the mechanical resonance frequency given by:
where m is the effective mass of the levitated part of the structure. The applied electrostatic force could be calculated from [16]:
where ε is the relative permittivity. And therefore the actuation voltage is:
where ∆d is the displacement of the movable plate as the result of applied voltage V.

Perspective view of the proposed variable capacitor including emphasized spring sets; this figure presents the spring sets beneath the structure with zoomed spring sets given

Key-dimension parameters of the crab-leg spring
Although the actuation voltage is increased by the second root of the spring constant, it is reduced by the initial gap directly. Hence, the required actuation voltage for each step is less than that of previous step and therefore the proposed variable capacitor requires small actuation voltages as will be characterized in the next section.
3 Simulation Results
Design parameters of the proposed variable capacitor are listed in Table 1. The mentioned, embedded dimples are illustrated in Fig. 4. The height of dimples is calculated so that they reach to the substrate just before the structure goes to instability. Hence, the maximum achievable stable capacitance is:
where C0 is the initial capacitance and n is the number of dimpling steps. Dimpling steps are the specific fractions of the initial gap where increasing in the electrostatic force is getting more than that of restoring force and hence based on previously mentioned positive feedback, pull-in effect is occurred. When DC voltage is applied between parallel electrodes, movable electrode starts moving toward the fixed one. But just before the 2/3 of the initial gap between them one set of the dimples achieve to the substrate and increase the restoring force which could tolerates against the actuating force for 2/3 of the remaining gap. Therefore, by considering 4 dimpling steps, the resulting tuning ratio would be 7.6:1. Obviously, if the number of dimpling steps increased, for example only by one step, the tuning ratio is incidentally increased to 11.4:1. This result presents the effectiveness of the proposed method.

Dimples and their locations on internal and external spring sets; the dimples are designed such that they achieve to the substrate and become anchors for increasing the restoring mechanical force before catastrophic pull-in occurred and therefore increase the tenability of the varactor
From Eq. (7) the required voltage for achieving 7.6:1 of tuning ratio is only 14.3 V. Figure 5 shows the overall capacitance versus the tuning ratio. It can be seen that the required actuation voltage is reduced as the step number (n) is increased. Modal analysis is also important for analyzing of the environmental effects such as acceleration on the precision of the structure. As shown in Fig. 6 the main natural frequency of the designed variable capacitor is about 11.2 kHz which is way more than that of available environmental frequencies. This value is also predictable from Eq. (5).

Diagram of capacitance versus actuation voltage; it could be seen that, by proper dimpling steps with reasonable actuation voltages, high tuning dynamic ranges could be achieved

Modal analysis of the proposed variable capacitor at its first mode; this mode shape is susceptible to environmental vibrations and therefore could easily degrade the performance of the structure in Brownian noise point of view. Fortunately, based on the presented design procedure the natural frequency of this mode is more than 11 kHz which is way beyond the available environmental vibrations
Stress distribution over the external spring at the initial state of the capacitor is shown in Fig. 7 which mentions very small stresses over springs that guarantees remaining the structural material at its linear region.

Stress distribution over the external spring; the maximum stress over the structure is at connecting points between the main spring and the anchor which much less than maximum tolerable stress by the structural material. This simulation is very important for considering the durability of the structure
Since the minimum spring constant is at the initial state of the varactor, the maximum Brownian noise-related displacement will be at that situation. But, on the other hand, since the maximum gap is the initial gap, the effect of Brownian noise is less critical there. By the way, the Brownian noise displacement at this location is only 3.7 pm which is completely ignorable in comparison with 2 μm of initial gap and could cause utmost 1.85 ppm of capacitance error.
The proposed variable capacitor design technique requires low actuation voltage and presents very high tuning ratio which makes it a very promising method in designing of RF MEMS variable capacitors.
4 Conclusion
A novel method in design of low voltage and ultra-high tunable electrostatic parallel plate RF MEMS variable capacitor has been presented. The proposed method employed step-by-step spring strengthening of the structure to overcome 1.5:1 theoretical barrier for tuning ratio. Also, the structure has been designed to keep the required actuation voltage low enough to be simply implementable on integrated circuits. Based on its significant results, this method could pave the way of commercialization of RF MEMS variable capacitors. Our attempts on design of high performance RF MEMS devices are ongoing.
References
Borwick, R. L., III, Stupar, P. A., DeNatale, J., Anderson, R., Tsai, C., Garrett, K., et al. (2003). A high Q, large tuning range MEMS capacitor for RF filters systems. Sensors and Actuators A, 103, 33–41.
Buisman, K., de Vreede, L. C. N., Larson, L. E., Spirito, M., Akhnoukh, A., Yu, L., et al. (2007). A monolithic low-distortion low-loss silicon-on-glass varactor-tuned filter with optimized biasing. IEEE Microwave and Wireless Components Letters, 17(1), 58–60.
Yonghyun, S., Zhengzheng, W., & Rais-Zadeh, M. (2012). A high-performance continuously tunable MEMS bandpass filter at 1 GHz. IEEE Transactions on Microwave Theory and Techniques, 60(8), 2439–2447.
Bakri-Kassem, M., & Mansour, R. R. (2009). Linear bilayer ALD coated MEMS varactor with high tuning capacitance ratio. IEEE/ASME Journal of Microelectromechanical Systems, 18(1), 147–153.
Kawakubo, T., Nagano, T., Nishigaki, M., Abe, K., & Itaya, K. (2006). RF-MEMS tunable capacitor with 3 V operation using folded beam piezoelectric bimorph actuator. IEEE/ASME Journal of Microelectromechanical Systems, 15(6), 1759–1765.
Cruau, A., Lissorgues, G., Nicole, P., Placko, D., & Ionescu, A. M. (2005). V-shaped micromechanical tunable capacitors for RF applications. Microsystem Technologies, 12, 15–20.
Yoon, J. -B., & Nguyen, C. T. -C. (2000). A high-Q tunable micromechanical capacitor with movable dielectric for RF applications. Technical digest, IEEE international electron devices meeting, San Francisco, California, 11–13 December (pp. 489–492).
Rebeiz, G. M. (2003). RF MEMS: Theory, design, and technology. Hoboken, NJ: Wiley.
Elshurafa, A. M., Ho, P. H., Radwan, A. G., Ouda, M. H., & Salama, K. N. (2012). Low-voltage puzzle-like fractal microelectromechanial system variable capacitor suppressing pull-in. IET Micro Nano Letters, 7(9), 965–969.
Shavezipur, M., Hashemi, S. M., Nieva, P., & Khajepour, A. (2010). Development of a triangular-plate MEMS tunable capacitor with linear capacitance–voltage response. Microelectronic Engineering, 87, 1721–1727.
Dec, A., & Suyama, K. (2000). Microwave MEMS-based voltage controlled oscillators. IEEE Transactions on Microwave Theory and Techniques, 48, 1943–1949.
Tsang, T., & El-Gamal, M.: Very wide tuning range microelectromechanical capacitors in the MUMPs process for RF applications. In IEEE symposim on VLSI circuits, 2003 (pp. 33–36).
Richard, J. -F., & Savaria, Y. (2004). High voltage charge pump using standard CMOS technology. In The 2nd annual IEEE northeast workshop on circuits and systems, NEWCAS, 20–23 June, Montreal, Canada (pp. 317–320).
Yun, W. (1992). A surface micromachined accelerometer with integrated CMOS detection circuitry. Ph.D. thesis, University of California at Berkeley, Berkeley, CA.
Andrews, M., Harris, I., & Turner, G. (1993). A comparison of squeeze-film theory with measurements on a microstructure. Sensors and Actuators, 36, 79–87.
Baghelani, M., Badri Ghavifekr, H., & Ebrahimi, A. (2013). Precise analytical evaluation of the ring shape anchored contour mode disk resonator for constructing a low noise UHF Pierce oscillator. Microsystem Technologies, 19(7), 1087–1095.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Baghelani, M., Ghavifekr, H.B. A Novel Technique for Design of Ultra High Tunable Electrostatic Parallel Plate RF MEMS Variable Capacitor. Sens Imaging 18, 28 (2017). https://doi.org/10.1007/s11220-017-0180-9
Received:
Revised:
Published:
DOI: https://doi.org/10.1007/s11220-017-0180-9