
Abstract
Within the European Space Agency’s (ESA) General Support and Technology Programme (GSTP), the Project for On-Board Autonomy (PROBA) missions provide a platform for in-orbit technology demonstration. Besides the technology demonstration goal, the satellites allow to provide services to, e.g., scientific communities. PROBA1 has been providing multi-spectral imaging data to the Earth observation community for a decade, and PROBA2 provides imaging and irradiance data from our Sun to the solar community. This article gives an overview of the PROBA2 mission history and provides an introduction to the flight segment, the ground segment, and the payload operated onboard. Important aspects of the satellite’s design, including onboard software autonomy and the functionality of the navigation and guidance, are discussed. PROBA2 successfully proved again within the GSTP concept that it is possible to provide a fast and cost-efficient satellite design and to combine advanced technology objectives from industry with focussed objectives from the science community.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The Project for On-Board Autonomy (PROBA) is the second microsatellite mission of the European Space Agency’s programme for in-orbit technology demonstration. The main objective of the PROBA missions is the demonstration and validation in flight of innovative space technologies and techniques, in order to promote their utilisation in future space missions. The PROBA platforms are hence designed to accommodate and provide sufficient resources to a number of selected technology experiments, and to offer an opportunity for technology characterisation in the real space environment. Other objectives are the proof of concept and verification in the framework of a real space mission, the demonstration of innovative approaches and techniques in the areas of onboard software design and development, and of mission and spacecraft operations. A few of the key concepts are:
-
A high level of autonomy in the spacecraft platform’s and payloads’ resources management.
-
A high level of autonomy in the reaction to anomalies by the onboard software.
-
A high degree of automation in the ground-segment management and operations.
-
The use of innovative attitude and position determination, guidance, and attitude control algorithms, allowing the spacecraft full autonomous onboard navigation, time management, and platform manoeuvring.
-
New concepts for Earth observation and, e.g., formation flying techniques.
A few of these innovations are demonstrated onboard PROBA1 (Teston et al. 2004), launched in 2001 and still supporting the Earth-observation community. The PROBA-V spacecraft (Maisongrande et al. 2010) will be launched in 2013 and will provide the continuation of the SPOT/VEGETATION (Système Pour l’Observation de la Terre Vegetation) operational services by fully automated operations using three multi-spectral cameras. The PROBA-3 mission (Landgraf and Mestreau-Garreau 2013) is a formation-flying demonstration and will consist of two spacecraft: a coronagraph and an occulter flying in a highly elliptical orbit. The mission described in detail here, PROBA2, carries 17 hardware and software technology demonstrators, some of which are main components of the platform, allowing, e.g.,
-
autonomous onboard handling of automatic feature-tracking requested by the payload,
-
autonomous onboard handling of off-pointing requests issued on-ground,
-
onboard processing, including compression and data-product prioritisation.
Beside the mission’s primary objective, the PROBA satellites offer flight opportunities for scientific payloads, whose resource requirements are compatible with the platform, system capabilities, satellite’s orbit, and mission profile. For this, ESA released an Announcement of Opportunity in 2002, open to any scientific or engineering community. A main selection criterion was the technological-innovation content that led to the selection of two scientific instruments:
-
Sun Watcher with Active Pixel System detector and Image Processing (SWAP: Berghmans et al. 2006; Seaton et al. 2012), representing the first in-orbit application of an Active Pixel Sensor (APS: de Groof et al. 2008) for solar observations.
-
Large Yield Radiometer (LYRA: Dominique et al. 2012; Hochedez et al. 2006), testing a diamond-based, wide-bandgap detector in space to observe the solar irradiance.
The primary payload was then complemented by two compact space-weather instruments to monitor the orbital plasma environment:
-
Dual Segmented Langmuir Probe (DSLP: Herčik et al. 2008), the second demonstration of directional plasma measurements in space.
-
Thermal Plasma Measurement Unit (TPMU: Hruška et al. 2007), testing a new electronic design to measure the ion temperature and the spacecraft floating potential.
The ESA Science Programme Committee (SPC) accepted in 2006 the SWAP and LYRA Science Management Plan and endorsed the PROBA2 mission as a national-led ESA Programme. The Science Management Plan guaranteed an open data policy, and supplementary actions to support the scientific exploitation were initiated, i.e. the Guest Investigator Programme for PROBA2.
The scientific payload of PROBA2 aims at identifying and studying all events on the Sun that might have implications on the solar–terrestrial connection. This is achieved both through imaging (SWAP) and through irradiance measurements (LYRA). The crucial novelty of PROBA2 is that essential events such as coronal mass ejections (CMEs), EIT waves, and EUV dimmings are observed with a temporal resolution that is at least an order of magnitude better than the SOHO mission, and that one can follow flares through satellite off-pointings.
PROBA2 was launched from the Plesetsk Cosmodrome in northern Russia, as a secondary passenger of an Eurockot launcher, with ESA’s Soil Moisture and Ocean Salinity (SMOS: Barre, Duesmann, and Kerr 2008) satellite, the primary payload of the rocket flight, on 2 November 2009. Following successful insertion into a dawn–dusk, Sun-synchronous, low-Earth orbit, and successful completion of the commissioning activities of the platform, instruments, technology demonstrators, and ground segment, the mission has recently successfully finished its third year of nominal science and technology operations. The mission management of the PROBA2 mission will be transferred on 1 July 2013 from the Agency’s Directorate of Science and Robotic Exploration to the Directorate of Human Space Flight to become part of the Space Situational Awareness Programme (SSA: Bobrinsky and Del Monte 2010).
Figure 1 shows the satellite during launch preparation. Figures 2 and 3 give an overview of the satellite design and construction.

PROBA2 (65 cm×70 cm×85 cm) mounted on top of the Rokot upper stage (Breeze) during the launch preparation campaign in October 2009 in Plesetsk, Russia, shortly before encapsulation and fairing closure. Solar panels are folded in launch configuration. Protection covers of solar panels, star tracker, and other instruments are already removed.

Design diagram showing the satellite from left-top panel point-of-view.

Design diagram showing the satellite from the back-right panel point-of-view, with indication of main reference frame.
The Mission Operations Centre (MOC) is located at ESA’s Redu Ground Station, Belgium. The operations team monitors and controls the satellite by regular communication passes to and from the satellite. The PROBA2 Science Centre (P2SC) is co-located with Solar Influences Data analysis Centre (SIDC: Berghmans et al. 2002) at the Royal Observatory of Belgium. From there, the scientific instruments are monitored, their operations planned and commanded, and engineering and scientific data are distributed to the solar community (Zender et al. 2012).
2 The Orbit
The PROBA2 operational Sun-synchronous orbit is circular, with an altitude of 730 km, and 6:00 local time of ascending node (LTAN). The LTAN was chosen to provide a maximum continuous observation time of the Sun. The orbit is free from solar eclipses for most of the year, with a limited eclipse season between mid-November and the end of January. The maximum eclipse duration as experienced by the satellite is 18 minutes per orbit, with the spacecraft continuously in sunlight for the rest of the year. As SWAP and LYRA instruments observe in the (extreme) ultraviolet ((E)UV), a dimming effect caused by light absorption through the Earth’ atmosphere can be observed some weeks before and fading out some weeks after the end of the visual-light eclipses; see Seaton et al. (2012) and Dominique et al. (2012).
The accuracy of the injection into this final PROBA2 orbit was very high. The orientation of the satellite’s orbital plane is expected to drift naturally, due to the characteristics of the selected orbit, to an LTAN of 6:22 in 2016 followed again by a decrease towards 6:00 making the achieved orbit suitable for the mission purposes for ten years and beyond, with no need for orbit maintenance and correction manoeuvres.
3 The Spacecraft
Within an overall mass of 130 kg and a volume of 65×70×85 cm3 in the stowed configuration, the PROBA2 platform has been designed as a fully redundant system, built on a structure combining aluminium panels for the internal, main load carrying, core and carbon-fibre reinforced polymer (CFRP) honeycomb panels for the outer body shell and the deployable solar panels (see Table 1). Triple junction gallium arsenide solar cells, mounted on one body panel and on the two deployable panels, are capable of supplying 120 watts peak power to the spacecraft. The power distribution to all platform units and instruments is done using a battery-regulated, centrally switched 28 V bus, and a new design lithium-ion battery, having its maiden flight on PROBA2 and providing 16.5 A h capacity, is used for energy storage. The PROBA2 telecommunication subsystem, used for uplink and downlink communications in S-band, is designed around a set of redundant receivers and transmitters guaranteeing communication with the ground antenna in any mission mode and attitude condition. It also implements the first use of the medium-rate uplink standard for faster commanding (64 kbit s−1 instead of 4 kbit s−1). The management and control of the entire PROBA2 system, platform units, navigation and attitude control functions, scientific payloads and technology experiments, the handling, storage, and the processing of acquired data, and all power related functions are combined in the spacecraft’s Advanced Data and Power Management System (ADPMS: Puimege 2006) computer based on a cold redundant, radiation-tolerant, LEON2-FT RISC processor, providing the entire platform’s computing power.
The PROBA satellite’s onboard software is designed and implemented to provide the system with extremely high levels of onboard autonomy. PROBA2 is capable of handling its routine mission completely onboard, only interacting with the ground station for the downlinking of the acquired scientific data and for the acquisition of new observation requests. Besides the nominal mission’s management in complete autonomy, a large quantity of possible onboard anomalies can be handled without ground intervention, due to integrated Failure Detection, Isolation and Recovery (FDIR) capabilities, allowing the system’s automatic reconfigurations. This allows the continuity of scientific-data acquisition, as long as a minimum set of required units is available. In addition, the onboard software supports dedicated payload services to ensure the maximisation of the scientific-data return and the autonomous scientific mission management, by:
-
onboard image compression based on the lossless Lempel–Ziv–Welch (LZW) and the lossy JPEG standards (Pennebaker and Mitchell 1993),
-
autonomous handling of on-ground commanded off-pointing,
-
image processing for feature detection, e.g. the detection of coronal mass ejections (CME),
-
autonomously adjusting the spacecraft’s attitude by commanding an off-pointing (up to three degrees), following the point above,
-
prioritisation of images based on image quality,
-
prioritisation of images based on the accordance with different on-ground selected criteria.
4 The Ground Segment
The PROBA2 Ground Segment for the operational configuration consists of three main elements: the Antenna Ground Stations, the Mission Operation Centre (MOC), and the PROBA2 Science Operation Centre (P2SC).
Flight-dynamics and technology-demonstrator operations planning, as well as spacecraft operations, are conducted from the MOC, located at the ESA Ground Station of Redu, Belgium. This station also hosts one of the S-band antennas used for spacecraft communication. The second antenna is located in Svalbard, Norway, and both have been available for an average of nine downlink passes per day. The downlink rate is 1 Mbit s−1 resulting in about 45 MBytes of scientific and ancillary data per downlink pass. The operations of the onboard technology demonstrators typically do not interfere with the nominal scientific observations, and as a consequence no daily interaction is needed between the MOC and P2SC. The MOC is designed for a full automatic performance of all nominal operations, including satellite-pass prediction, scheduling of pass activities, processing and uploading of received scientific observations requests, and spacecraft-data collection, storage, and distribution. Operator intervention is needed only for the preparation and execution of off-nominal activities such as, for example, specific, non-routine, test requests for any of the technology demonstrators, or for system maintenance or upgrade activities. In line with the small-mission approach, the facilities at the MOC, e.g. ground antenna, pass-planning system, and web server, are shared between the PROBA missions.
The P2SC is located at the facilities of the Royal Observatory of Belgium (ROB) in Brussels. Instrument planning requests for the two main payloads, SWAP and LYRA, are transferred via an agreed protocol and taken automatically into account in the MOC uplink planning activities. S-band telecommunication frames are converted into instrument packets – and in case of SWAP, further processed into data files containing packets of individual images. All data are then made available to the P2SC, which is responsible for the data processing into engineering and scientific data products. The cycle is automated and ensures a response time of only several hours from the detection of a solar event to a consequent change of the onboard instrument mode, the uplink of this change, its execution, the downlink of the newly acquired data, and to the final, on-ground data processing; see Zender et al. (2012). The medium and long-term planning of the scientific observations, the technology demonstrations, and the spacecraft maintenance are coordinated within the framework of bi-monthly Science and Technology Operations Working Group (STOWG) meetings.
5 The Payload
A large number of new technologies have been flight qualified onboard PROBA2, both as part of the scientific payload and the technology demonstrator payload.The technology demonstrator payload comprises:
-
Digital Sun Sensor (TNO, The Netherlands).
-
BepiColombo Star Tracker (Selex Galileo, Italy).
The Digital Sun Sensor (DSS) and the BepiColombo star tracker are both digital attitude sensor based on active pixel sensors (APS) technology using recent technology advances in active pixel arrays, as well as micro-mechanical devices and folded optics. Both payloads are prototypes for use on the upcoming ESA BepiColombo mission and will allow the analysis of ageing effects due to long-term exposure in space.
-
Propulsion module, consisting of:
-
Cold Gas Propulsion System (SSTL, United Kingdom).
-
Cool Gas Generator experiment (Bradford Engineering, United Kingdom and TNO, The Netherlands).
A solid-state nitrogen gas generator, which generates nitrogen to re-pressurise the propulsion-module tank.
-
Propulsion controller, integrated into the platform’s AOCS I/F module.
The Resistojet Thrusters of the propulsion system have been used to validate and quantify the performance of a resistojet system based on xenon. After almost total depletion of the contained xenon in the course of an extensive propulsion-system experimentation campaign, the propulsion system’s tank has been refilled and re-pressurised, using the embarked Cool Gas Generator (COGEX). The COGEX technology demonstration experiment contains four solid-state cartridges that generate nitrogen when ignited. After the successful ignition of the first cartridge, successive ignitions are planned in the course of the ongoing mission, to verify the behaviour of the system under the effects of ageing.
-
-
Fibre Sensor Demonstrator (FSD) (MPB, Canada).
The FSD uses fibre sensors for temperature and pressure measurements. The sensors are mounted in different spacecraft locations, including the propulsion system and the xenon tank.
-
Science Grade Vector Magnetometer (SGVM) (DTU, Denmark).
The SGVM is a flux-gate magnetometer delivering in real time the components of the magnetic field with a very high precision. The instrument is mainly intended for scientific use, but can be used as well by spacecraft attitude-control systems. The demonstration model of this unit flying onboard PROBA2 is paving the way for its operational successor to be flown on ESA’s 5th Earth Explorer Programme mission (Swarm: Friis-Christensen et al. 2008).
-
Experimental Solar Panel with a solar-flux concentrator (ESP) (CSL, Belgium).
The ESP is a solar-panel concentrator experiment, aiming at studying the temperature behaviour and the ageing effects resulting from radiation and from the concentrated solar flux on the photo-voltaic cells. It uses triple-junction GaAs solar cells. In-flight results showed an increase of 55 % in cell efficiency. In the course of the PROBA2 mission lifetime, activations of this technology demonstrator and measurements of the generated power are performed at regular intervals, in order to monitor the performance of the system and evaluate the solar cells’ degradation.
-
A dual-frequency Global Positioning System (GPS) receiver (Thales Alenia Space, France).
Supplements the platform GPS receiver that is based on commercial technologies and incorporates an advanced navigation filter software module, PROBA2 flies for the first time a radiation-hard dual-frequency GPS space receiver. The unit has demonstrated nominal performances, also in dual mode, when allowed by GPS visibility.
-
An Exploration Micro-Camera (XCAM) (SpaceX, Switzerland).
The X-CAM is a powerful miniaturised micro-camera equipped with large field-of-view optics, regularly used on PROBA2 to acquire images of the Earth.
-
A Laser RetroReflector (LRR) (Federal Unitary State Enterprise, Russia).
The LRR is a passive optical device, reflecting laser pulses emitted from a network of stations on the ground back to the sending station for precise satellite-orbit determination. A tracking campaign with the support of the International Laser Ranging Service (ILRS) was performed to correlate the GPS measurements obtained by the platform GPS receiver with real orbit measurements, confirming the GPS positioning performance. In addition, the same ground-correlation technique has been used for the accurate assessment of the impact on the spacecraft orbit following propulsion system firings.
-
A set of magnetometers (ZMM) (ZARM, Germany).
-
A Credit Card Magnetometer (CCM) (Lusospace, Poland).
The Credit Card Magnetometer and Zarm Magnetometer are new developments of high-precision, high-rate, three-axis magnetometers, such as analogue Hi-Rel flux-gate and digital Anisotropic-Magneto-Resistor (AMR) magnetometers.
-
A set of additional innovative Guidance, Navigation, and Control (GNC) algorithms (NGC, Canada).
The GNC algorithms included in the PROBA2 ACNS software improve the performance of autonomous onboard navigation systems, including:
-
A simple, however robust, navigation algorithm to autonomously evaluate and compensate for the attitude torque perturbations due to the interaction of the spacecraft residual magnetic dipole with the orbital magnetic environment. This module, originally carried as a technology demonstration, has been, after an extensive successful evaluation campaign, integrated in the onboard autonomous navigation loop of PROBA2, to even further improve the spacecraft absolute pointing accuracy performances, for the optimisation of the quality of the scientific data.
-
A GPS-based orbit-estimation module using a square-root Unscented Kalman Filter (UKF).
-
A star-tracker-based attitude-estimation module using a square-root UKF.
-
UKF-based orbit and attitude determination algorithms based on measurements coming from simple sensors, such as magnetic field, temperature sensors, eclipse/sunlight detection, and current generation by the solar panels.
-
Simple algorithms for orbit determination using eclipse entry and exit detection and spacecraft panels’ temperature sensors measurements only. These algorithms are intended for use on low-cost missions or missions with limited onboard resources, or to allow onboard autonomous navigation when more accurate sensors become unavailable.
-
An improved safe mode control algorithm guarantees the three axes stabilisation of the platform. The algorithm is based on data from magnetic sensor actuators, and has been successfully validated exposing the platform to a multitude of conditions.
-
-
The Technology Demonstration Module (TDM) (QinetiQ Space, Belgium).
The TDM is made of an additional ADPMS board, measuring the total ionisation dose, single-event upsets and single-event latch-ups.
There are four scientific payloads onboard, all of them comprising new technologies:
-
Sun Watcher with Active Pixel System detector and Image Processing (SWAP: Berghmans et al. 2006; Seaton et al. 2012) (CSL and ROB, Belgium).
SWAP is designed as an off-axis Ritchey–Chrétien telescope equipped with an EUV-enhanced active-pixel sensor (APS) detector, the first in-orbit use of this technology for solar science. SWAP provides solar coronal images at a two-minute cadence in a bandpass centred on 17.4 nm. Observations with this specific wavelength allow detecting phenomena, such as prominences, solar flares, or EUV waves, associated with the early phase of coronal mass ejections. As part of the onboard software autonomy, image-processing software was developed to automatically detect off-limb CMEs. This software feature has, however, not yet been tested onboard.
-
Large Yield Radiometer (LYRA: Dominique et al. 2012). Designed and manufactured by a Belgian–Swiss–German consortium (Royal Observatory of Belgium (ROB), Brussels, Centre Spatial de Liège (CSL), Institute for Material Research in MicroElectronics (IMOMEC), Hasselt, Belgium, Max-Planck-Institute für Sonnensystemforschung (MPS), Lindau, Germany, and the Belgian Institute for Space Aeronomy (BISA), Belgium.
The LYRA radiometer is made of three units, each consisting of four channels:
-
the 115 – 125 nm Lyman α channel,
-
the 200 – 220 nm Herzberg continuum range,
-
the aluminium-filter channel (17 – 70 nm) including He ii at 30.4 nm and
-
the zirconium-filter channel (1 – 20 nm).
The solar irradiance is monitored in two EUV passbands (zirconium and aluminium filters) and two UV passbands (Lyman α and Herzberg continuum). The (E)UV channels provide measurements of the solar activity every 50 milliseconds, more or less continuously since first light. During the occultation season between November and March every year, LYRA contributes to the long-term trend analysis of the chemical components in the Earth atmosphere, providing extinction curves in each of its four channels. To support these studies, a high time resolution is important as it translates into spatial resolution of the height profile while PROBA2 transitions the Earth occultation zone. The instrument stability is continuously monitored by onboard calibration sources (LEDs), and since launch a strong degradation of the main unit was observed (Dominique et al. 2012). Due to the availability of two other, redundant units, long-term measurements are ensured. LYRA uses wide bandgap detectors based on diamond. Diamond detectors make the instruments radiation-hard and solar-blind: their high bandgap energy makes them insensitive to visible light and, therefore, makes it possible to dispense with visible-light blocking filters, which seriously attenuate the desired ultraviolet signal. The elimination of the filters augments the effective area and hence the signal-to-noise, therefore increasing the precision and the cadence.
-
-
Dual Segmented Langmuir Probe (DSLP: Herčik et al. 2008) (Academy of Sciences, Czech Republic).
The main objectives of the experiment are to study characteristic macroscopic properties of ionospheric plasmas and their relations to external space-weather drivers. The DSLP experiment represents a new type of measuring device in the broad family of electrostatic Langmuir probes. The new technique used on this instrument consists of data acquisition from several independent sectors of a spherical-shaped electrode providing directional measurements of the plasma properties. This new concept, called the segmented Langmuir probe (SLP), was originally flown on the French microsatellite Demeter (Lebreton et al. 2006). The DSLP design for the PROBA2 mission comprises two identical sensors based on the SLP concept. Both are spherical shaped probes, 4 cm in diameter, divided into seven plus one independent segments, i.e. seven smaller disc-shaped segments on the sphere plus the rest of the conducting surface of the electrode serving as the guard segment. The two sensors of the DSLP experiment are mounted on the rear side of the deployable solar panel at the end of short rigid booms. In the burst mode, the plasma diagnostics are provided at 1 Hz from all segments of both sensors. In addition to the classical plasma diagnostic technique of electrostatic probes, the two identical SLP sensors of the DSLP instrument can provide E-field sampled at 2 MHz.
-
Thermal Plasma Measurement Unit (TPMU) (Academy of Sciences, Czech Republic).
The TPMU uses a new electronic design to measure several ion characteristics (temperature, density, composition), electron temperature and density as well as the spacecraft floating potential. Due to an onboard software problem within the instrument, the payload could not demonstrate its full functionality in space.
6 PROBA2 Autonomous Navigation, Guidance and Control Functions
An Attitude, Control, and Navigation Subsystem (ACNS) is essential for the autonomous mission and platform management and onboard activities scheduling, allowing a completely autonomous satellite attitude, position, and orbital events determination, satellite guidance, attitude control, and manoeuvring, and onboard time management.
The PROBA2 ACNS hardware set is composed of four reaction wheels (one in cold redundancy), two cold-redundant magnetometers, a redundant miniaturised μ-ASC star tracker with two hot-redundant camera heads to improve measurement accuracy, a cold-redundant GPS receiver, and three internally cold-redundant magnetotorquers.
For the complete implementation of the PROBA2 mission, six operational guidance laws have been implemented in the ACNS software. Transition between any of the modes is possible either by manual commanding from the MOC or, in an autonomous fashion, by commanding from the onboard software’s mission manager. The onboard Global Positioning System (GPS) device provides orbital parameters to the ACNS software. Alternatively, the Two-Line Elements can be uploaded from the MCC. In this case, the orbit is propagated onboard and orbital parameters derived directly by the onboard software.
-
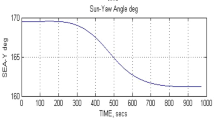
The Sun mode is the standard ACNS guidance law responsible for supporting the scientific-payload operations. In this high pointing-performance mode, the payload is constantly pointed towards the Sun. To avoid blinding of the star trackers’s optical heads by the Earth-reflected illumination, the spacecraft performs, four times per orbit (A, B, C, D in Figure 4), a large-angle rotation (LAR) of 90 degrees around the payload’s line of sight. The precise time for the rotations is computed by the onboard software in real time. One of the axis of the SWAP imager sensor reference frame is always maintained parallel to the Ecliptic North–South direction within an accuracy of one degree. The duration of the rotations depends on the selected accommodation of the reaction wheels, but they are typically executed – including the spacecraft stabilisation – within two minutes. The SWAP images obtained during the rotation are smeared. As a consequence, a rotation of 90 degrees around the centre of the images has to be taken into account during the on-ground processing of the SWAP images (Seaton et al. 2012). The LYRA instrument is very sensitive to off-pointing operations and thus shows artefacts during each rotation (Dominique et al. 2012). The Sun pointing and the LARs are maintained throughout the whole mission, including the eclipse season. Within the Sun mode, the P2SC can command offsets and platform rotations up to three degrees to support calibration and scientific observation campaigns. An appropriate repointing of the sensors after the rotation is autonomously taken into account by the guidance functions.
Figure 4 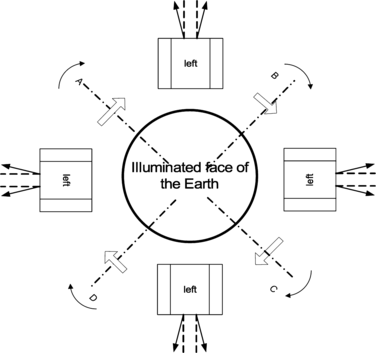
Orientations of PROBA2 during nominal observation mode (not to scale).
-
The stand-by mode is based on the Bdot algorithm (de Lafontaine 2006) and will de-tumble the satellite and keep it in a safe and controlled state, with minimal power consumption and sufficient solar-power input. This mode uses a magnetometer and magneto-torquers and the Earth’ magnetic field to stay in a controlled tumbling rate at twice the orbital rate. Two reaction wheels are used for momentum bias around the spacecraft’s −X-axis. The stand-by mode was also used as the main spacecraft angular rate-reduction mode to remove the excess angular rate imparted to the spacecraft at separation from the launch vehicle.
-
The inertial mode, in which the spacecraft’s attitude is controlled with respect to an inertially fixed reference frame.
-
The orbital mode in which the spacecraft’s attitude is controlled with respect to the so-called orbital reference frame. In this mode, applications can be supported that require Nadir pointing of a particular side or direction of the satellite.
-
The flight mode in which the spacecraft’s attitude is controlled with respect to the orbital velocity. This mode is used for the activation of the technology demonstration propulsion system.
-
The Earth-target mode in which the spacecraft’s attitude is controlled to point towards a fixed target on Earth. This mode is inherited from the PROBA1 mission (Teston et al. 2004).

In addition, the ACNS software allows full onboard autonomous orbital and attitude navigation and onboard time management and correlations, for autonomous predictions of all manoeuvres’ execution times, and of all relevant Sun- or Earth-related events (eclipse entry and exit times, node crossing, and target flyby times). It also allows estimation of environmental perturbation torques and residual spacecraft magnetism for improved pointing. The control module is based on a state-feedback controller for fine control and on a sliding mode controller for large manoeuvres. The control function also manages the reaction-wheels’ momentum offloading and the Bdot algorithm, both using magneto-torquers as actuators.
The development approach of such a complex ACNS system within the scope of a small mission such as PROBA2 has itself been an innovative aspect. Its feasibility and reliable verification was made possible by the utilisation, throughout the entire development flow, of high-level modelling tools and advanced autocoding techniques, allowing very efficient generation and testing of the ACNS software and integration and validation with the onboard software.
7 In-orbit Performance
During the PROBA2 commissioning phase, the performance specifications of the platform and the system were confirmed. Most relevant for the operations of the scientific instruments were the following.
-
The end-to-end pointing accuracy was derived from the centre position of the solar disk computed from SWAP images. The SWAP pixel size is 3.16 arcsec, and the following performance values were obtained:
-
An Absolute Pointing Error (APE) of 87 arcsec (2σ). The requirement was 100 arcsec (2σ).
-
A Measured Relative Pointing Error (RPE) of 2 arcsec within 5 seconds (2σ) and 5 arcsec within 60 seconds (2σ).
-
-
The spacecraft position accuracy was confirmed by two independent solutions:
-
The kinematic-navigation solution used for autonomous onboard navigation by the ACNS software determined the positional accuracy to two meters and the velocity accuracy to be 5 cm s−1.
-
The real-time navigation filter that is carried as a technology demonstration item determined a positional accuracy of one meter and a velocity accuracy of 4 mm s−1.
-
-
The available power budget is 90 watts during the eclipse period and 120 watts during non-eclipse periods. The operations of the spacecraft and its subsystems, including the transmitters and the scientific payload, consumes less than 72 watts. As a consequence, the technology demonstrators can be operated without any potential power-resource constraint at any time.
-
The ADPMS (Puimege 2006) usage is around 40 % for all nominal platform activities during sun mode. The SWAP image compression is also processed by the ADPMS and consumes all available CPU IDLE time. As the compression software has lowest execution priority and SWAP images are first stored in a raw buffer and are then compressed one-by-one, no processing conflict arises.
-
Using nine S-band downlink passes per day proved to be sufficient to support a SWAP imaging cadence between 110 – 130 seconds throughout the year (Seaton et al. 2012) and a continuous 20 Hz sampling rate for LYRA (Dominique et al. 2012).
-
The thermal environment was higher on average than expected by design for most subsystems, including the scientific instruments. This was partly explained by deviations of the thermal model itself, but also by unexpected thermo-optical properties (degradation) of some coatings used on the spacecraft. In Summer 2011, a reduction of the SWAP and LYRA instrument temperatures as well as an overall stabilisation was reached by delaying the Large Angle Rotations (LAR) by seven minutes. Figure 5 shows the thermal evolution measured near the SWAP detector since launch.
Figure 5 
Thermal evolution of the SWAP detector temperature since launch. A denotes the start of the yearly eclipse season, and B the end of the eclipse season. C indicates the applied delay of the LARs in August 2011 and the corresponding reduction of the thermal environment by several degrees.

8 Conclusions
The PROBA2 mission has successfully completed the commissioning phase, the nominal mission phase, and the first mission extension phase. All technology demonstrators and the scientific payload work nominally with the exception of degradation seen on the LYRA instrument (Dominique et al. 2012) and the Thermal Plasma Measurement Unit. The in-orbit demonstration has once more confirmed that
-
A microsatellite with advanced platform and payload technologies is capable of providing performance required by missions with challenging objectives or requirements.
-
A small mission can combine in-orbit demonstration of multiple technologies with the accommodation of new and advanced small payloads, capable of providing valuable science data to a scientific community.
-
A mission and system design using embedded onboard autonomy and automated ground segment allows reactive missions with high flexibility and fast response time between the scientific community and the payloads, while, at the same time, guaranteeing an efficient and lean operations management.
-
Advanced development methods are cost-efficient and robust.
-
An attitude control system based only on an autonomous star tracker as fine-pointing sensor can be sufficient for the fulfilment of pointing and stability needs of science and Earth observation missions.
Besides the technology achievements, PROBA2 is playing an essential role for the Solar Orbiter mission by training a European post-SOHO generation of solar physicists in mission and instrument development and its operations. In the future, PROBA2 will also play an important role in the European space weather activities as it provides independent data acquisition for space-weather predictions.
References
Barre, H.M.J.P., Duesmann, B., Kerr, Y.H.: 2008, IEEE Trans. Geosci. Remote Sens. 46, 587. doi: 10.1109/TGRS.2008.916264 .
Berghmans, D., Clette, F., Cugnon, P., Gabryl, J.-R., Hochedez, J.-F., Van der Linden, R.A.M., Verwichte, E.: 2002, J. Atmos. Solar-Terr. Phys. 64, 757. doi: 10.1016/S1364-6826(02)00037-8 .
Berghmans, D., Hochedez, J.F., Defise, J.M., Lecat, J.H., Nicula, B., Slemzin, V., Lawrence, G., Katsyiannis, A.C., van der Linden, R., Zhukov, A., Clette, F., Rochus, P., Mazy, E., Thibert, T., Nicolosi, P., Pelizzo, M.-G., Schühle, U.: 2006, Adv. Space Res. 38, 1807. doi: 10.1016/j.asr.2005.03.070 .
Bobrinsky, N., Del Monte, L.: 2010, Cosm. Res. 48, 392. doi: 10.1134/S0010952510050035 .
de Groof, A., Berghmans, D., Nicula, B., Halain, J.-P., Defise, J.-M., Thibert, T., Schühle, U.: 2008, Solar Phys. 249, 147. doi: 10.1007/s11207-008-9175-y .
de Lafontaine, J.: 2006, In: Danesy, D. (ed.) Poc. 6th Internat. ESA Conf. Guidance, Navigation, Control Systems SP-606, ESA, Noordwijk, 23.
Dominique, M., Hochedez, J.-F., Schmutz, W., Dammasch, I.E., Shapiro, A.I., Kretzschmar, M., Zhukov, A.N., Gillotay, D., Stockman, Y., BenMoussa, A.: 2012, Solar Phys. this issue.
Friis-Christensen, E., Lühr, H., Knudsen, D., Haagmans, R.: 2008, Adv. Space Res. 41, 210. doi: 10.1016/j.asr.2006.10.008 .
Herčik, D., Trávniček, P., Štverák, S., Hellinger, P., Lebreton, J., Kozáček, Z., Břinek, J.: 2008, AGU Fall Meeting Abstracts, B1629.
Hochedez, J.-F., Schmutz, W., Stockman, Y., Schühle, U., Benmoussa, A., Koller, S., Haenen, K., Berghmans, D., Defise, J.-M., Halain, J.-P., Theissen, A., Delouille, V., Slemzin, V., Gillotay, D., Fussen, D., Dominique, M., Vanhellemont, F., McMullin, D., Kretzschmar, M., Mitrofanov, A., Nicula, B., Wauters, L., Roth, H., Rozanov, E., Rüedi, I., Wehrli, C., Soltani, A., Amano, H., van der Linden, R., Zhukov, A., Clette, F., Koizumi, S., Mortet, V., Remes, Z., Petersen, R., Nesládek, M., D’Olieslaeger, M., Roggen, J., Rochus, P.: 2006, Adv. Space Res. 37, 303. doi: 10.1016/j.asr.2005.10.041 .
Hruška, F., Base, J., Chum, J., Klas, J., Kolmasova, I., Šmilauer, J., Truhlik, V.: 2007, Thermal plasma measurement unit for PROBAII microsatellite. In: 4th IS of IAA Proceedings, Wissenschaft und Technik Verlag, Berlin, 85. ISBN 3-89685-571-9.
Landgraf, M., Mestreau-Garreau, A.: 2013, Acta Astronaut. 82, 137. doi: 10.1016/j.actaastro.2012.03.028 .
Lebreton, J.-P., Štverák, S., Trávniček, P., Maksimovic, M., Klinge, D., Merikallio, S., Lagoutte, D., Poirier, B., Blelly, P.-L., Kozacek, Z., Salaquarda, M.: 2006, Planet. Space Sci. 54, 472. doi: 10.1016/j.pss.2005.10.017 .
Maisongrande, P., Vandenabeele, J., Malingreau, J.-P., Lobo, A., de Fourny, P., Gonthier, E., Mellab, K., Kleihorst, R.: 2010, In: EGU General Assembly Conf. Abs. 12, 14202.
Pennebaker, W.B., Mitchell, J.L.: 1993, JPEG Still Image Data Compression Standard.
Puimege, K.: 2006, In: Ouwehand, L. (ed.) DASIA 2006 – Data Systems in Aerospace SP-630, ESA, Noordwijk.
Seaton, D.B., Berghmans, D., Nicula, B., Halain, J.-P., De Groof, A., Thibert, T., Bloomfield, D.S., Raftery, C.L., Gallagher, P.T., Auchère, F., Defise, J.-M., D’Huys, E., Lecat, J.-H., Mazy, E., Rochus, P., Rossi, L., Schühle, U., Slemzin, V., Yalim, M.S., Zender, J.: 2012, Solar Phys. doi: 10.1007/s11207-012-0114-6 .
Teston, F., Vuilleumier, P., Hardy, D., Bernaerts, D.: 2004, Proc. SPIE 5546, 132.
Zender, J., Berghmans, D., Bloomfield, D.S., Cabanas Parada, C., Dammasch, I., De Groof, A., D’Huys, E., Dominique, M., Gallagher, P., Giordanengo, B., Higgins, P.A., Hochedez, J.-F., Yalim, M.S., Nicula, B., Pylyser, E., Sanchez-Duarte, L., Schwehm, G., Seaton, D.B., Stanger, A., Stegen, K., Willems, S.: 2012, Solar Phys., 142. doi: 10.1007/s11207-012-0033-6 .
Acknowledgements
The authors would like to thank the entire PROBA2 Teams at ESTEC, Redu, QinetiQ Space, all the subcontractors and suppliers, the universities and research institutes providing units or instruments to the PROBA2 mission, for their invaluable contribution to the mission and spacecraft design, development, verification, and testing and day-to-day operations.
Author information
Authors and Affiliations
Consortia
Corresponding author
Additional information
PROBA2 – First Two Years of Solar Observation
Guest Editors: David Berghmans, Anik De Groof, Marie Dominique, and Jean-François Hochedez
Rights and permissions
About this article
Cite this article
Santandrea, S., Gantois, K., Strauch, K. et al. PROBA2: Mission and Spacecraft Overview. Sol Phys 286, 5–19 (2013). https://doi.org/10.1007/s11207-013-0289-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11207-013-0289-5