
Abstract
This study investigates the longitudinal wave equation in a magneto-electro-elastic circular rod by using the extended sinh-Gordon equation expansion method. Topological, non-topological and singular soliton solutions are extracted. To illustrate the physical appearance of the obtained solutions, 2D, 3D and the contour graphs to some of the obtained solutions are plotted. The reported results may be useful in explaining the physical meaning of the studied models and other nonlinear physical models arising in nonlinear sciences.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
For the past two decades, the investigation of the solutions to the various types of nonlinear evolution equations (NEEs) has attracted the attentions of many researchers. Nonlinear evolution equations are often used to express some models that describe complex physical aspects which arise in the various fields on nonlinear sciences, especially in mathematical physics, chemical physics, plasma wave, biology and fluid mechanics. Various analytical techniques have been developed, modified and applied to explore search of the various solutions to such equations, this include the sine-Gordon expansion method (Baskonus et al. 2017; Bulut et al. 2016, 2017), the simple equation method (Nofal 2016), the generalized tanh function method (Inan and Kaya 2007), the Cole-Hopf transformation method (Wazwaz 2015), the improved F-expansion method with Riccati equation (Akbar and Ali 2017; Zhao 2013), the improved Bernoulli sub-equation function method (Baskonus and Bulut 2016), the extended mapping approach (Fang et al. 2005), the simplified homogeneous balance method (Wang and Li 2014), the modified exp \((-\Omega (\xi ))\)-expansion function method (Ozpinar et al. 2015; Baskonus et al. 2016), the He’s variational iteration method (Momani and Abuasad 2006; Dehghan and Shakeri 2008), the generalized tanh-function type method (Zhang 2013) and so on. In general, various analytical techniques for finding new solutions to different types of NEEs have been formulated (Noor et al. 2011; Bulut et al. 2017, 2018; Khan et al. 2014; Naher and Abdullah 2012; Rawashdeh 2014; Alquran et al. 2011; Yokus et al. 2018; Seadawy 2017; Rizvi and Ali 2017; Cattani and Rushchitskii 2003; Haq et al. 2017; Cattani 2003; Eslami et al. 2012, 2017; Seadawy 2015; Seadawy et al. 2017; Akbar et al. 2013; Mirzazadeh 2014; Sulaiman et al. 2017).
However, this study uses the extended sinh-Gordon equation expansion method (ShGEEM) (Xian-Lin and Jia-Shi 2008; Bulut et al. 2017; Baskonus et al. 2018) in extracting some solitary wave solutions to the longitudinal wave equation in a magneto-electro-elastic (MEE) circular rod (Baskonus et al. 2016). The longitudinal wave equation is an equation with dispersion caused by the transverse Poisson’s effect in a MEE circular rod which and it was derived by Xue et al. (2011).
The longitudinal wave equation in a MEE circular rod is given by Baskonus et al. (2016);
where \(v_{0}\) is the linear longitudinal wave velocity for a MEE circular rod and p is the dispersion parameter, all of them depend on the material property and the geometry of the rod (Xue et al. 2011). Different computational approaches have been used to investigate the solutions of the longitudinal wave equation in a magneto-electro-elastic MEE circular rod (Ma et al. 2013; Khan et al. 2016; Younis and Ali 2015).
2 The extended ShGEEM
In this sections, the general facts of the sinh-Gordon equation expansion method are presented.
To apply the ShGEEM, the following steps are followed:
Step 1 Consider the following nonlinear partial differential equation and the travelling wave transformation:
where P is a polynomial in \(\psi\), the subscripts indicate the partial derivative of \(\psi\) with respect to x or t, and
respectively.
Substituting Eq. (2.2) into Eq. (2.1), we get the following nonlinear ordinary differential equation (NODE):
where Q is a polynomial in \(\Psi\) and the superscripts indicate the ordinary derivative of \(\Psi\) with respect to \(\zeta\).
Step 2 We assume that Eq. (2.3) has the solution of the form Yan and Zhang (1999)
where \(A_{0},\;A_{j},\;B_{j}\) \((j=1,\;2,\;\ldots ,\;m)\) are constants to be determine later and \(\omega\) is a function of \(\zeta\) that satisfies the following ordinary differential equation:
To obtain the value of m, the homogeneous balance principle is used on the highest derivatives and highest power nonlinear term in Eq. (2.3).
Equation (2.5) has been extracted from the popularly known sinh-Gordon equation (Xian-Lin and Jia-Shi 2008) given as
Equation (2.5) has the following solutions (Xian-Lin and Jia-Shi 2008):
and
where \(i=\sqrt{-1}\).
Step 3 We substitute Eq. (2.4), its derivative with fixed value of m along with Eq. (2.5) into Eq. (2.3) to get a polynomial in \(\omega ^{'s}sinh^{i}(\omega )cosh^{j}(\omega )\) \((s=0,1\; \text{ and }\;i,\;j=0,\;1,\;2,\;\ldots )\). We collect a group of over-determined nonlinear algebraic equations in \(A_{0},\;A_{j},\;B_{j},\;k\) by setting the coefficients of \(\omega ^{'s}sinh^{i}(\omega )cosh^{j}(\omega )\) to zero.
Step 4 The obtained set of over-determined nonlinear algebraic equations is then solved with aid of symbolic software to determine the values of the parameters \(A_{0},\;A_{j},\;B_{j},\;k\).
Step 5 Based on Eqs. (2.7) and (2.8), solutions of Eq. (2.1) have the following forms:
3 Applications
In this section, the application of ShGEEM to Eq. (1.1) is presented.
Consider the the longitudinal wave equation (Eq. 1.1) given in Sect. 1. Substituting the travelling wave transformation
We get \(m=2\) by balancing \(\Psi ^{''}\) and \(\Psi ^{2}\) in Eq. (3.2).
With \(m=2\), Eqs. (2.4), (2.9) and (2.10) take the form
and
respectively.
Putting Eq. (3.3) and its second derivative along with Eq. (2.5) into Eq. (3.3), yields a polynomial in the power of hyperbolic functions. We collect a system of algebraic equations from the polynomial by equating each summations of the coefficients of the hyperbolic functions with the same power to zero. To obtain the values of the parameters involved, we simplify the system of the algebraic equations with aid of symbolic software. To get the new solutions to Eq. (1.1), we insert the obtained values of the parameters in each case into Eqs. (3.4) and (3.5).
Case 1 When
we have
Case 2 When
\(p=-\frac{\sqrt{(v_{0}^{2}-k^{2})^{2}}}{4k^{2}\mu ^{2}}\), we have
Case 3 When
\(v_{0}=k\sqrt{1+p\mu ^{2}},\) we have
Case 4 When
we have
Case 5 When
\(k=-\frac{v_{0}}{\sqrt{1+p\mu ^{2}}},\) we have
Case 6 When
we have

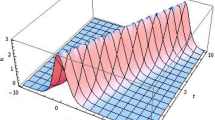
The a 3D, 2D surfaces b contour plot of the non-topological soliton [Eq. (3.6)]

The a 3D, 2D surfaces b contour plot of the singular soliton [Eq. (3.7)]

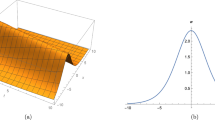
The a 3D, 2D surfaces b contour plot of the non-topological bell type soliton [imaginary part of Eq. (3.10)]

The a 3D, 2D surfaces b contour plot of the topological soliton [real part of Eq. (3.10)]

The a 3D, 2D surfaces b contour plot of the topological soliton [Eq. (3.16)]
4 Conclusions
In this study, we constructed some topological, non-topological, non-topological bell type and singular soliton solutions to the longitudinal wave equation in a magneto-electro-elastic circular rod by using the extended sinh-Gordon equation expansion method. Under the choice of suitable parameters, the 2D, 3D and the contour graphs to some of the obtained solution are presented. The reported results in this study have some physical meanings which are related to the studied model, such as; the hyperbolic tangent that arises in the calculation of magnetic moment and rapidity of special relativity, the hyperbolic cotangent that arises in the Langevin function for magnetic polarization and the hyperbolic secant that arises in the profile of a laminar jet (Weisstein 2002). All the computations and the graphics plots in this study are carried out with help of the Wolfram Mathematica 11. Baskonus et al. (2016) secured various complex hyperbolic function solutions to Eq. (1.1) by utilizing the modified exp \((-\varphi (\zeta ))\)-expansion function method. Ma et al. (2013) obtained some hyperbolic and trigonometric function solutions to Eq. (1.1) by using the modified \((G^{'}/G)\)-expansion method. Younis and Ali (2015) obtained some dark, bright and singular solitons to Eq. (1.1) by utilizing the the solitary wave ansatz scheme. When we compare our results with the reported results in the literature, we observed that using the presented technique, the solution to Eq. (1.1) are reduced to topological, non-topological, non-topological bell type and singular soliton solutions. The extended sinh-Gordon equation expansion method is an efficient and simple computational scheme which provides good results when applied to various nonlinear evolution equations (Figs. 1, 2, 3, 4 and 5).
References
Akbar, M.A., Ali, N.H.M.: The improved F-expansion method with Riccati equation and its applications in mathematical physics. Cogent Math. 4, 1282577 (2017)
Akbar, N.S., Nadeem, S., Haq, R.U., Khan, Z.H.: Numerical solutions of Magnetohydrodynamic boundary layer flow of tangent hyperbolic fluid towards a stretching sheet. Indian J. Phys. 87(11), 1121–1124 (2013)
Alquran, M., Al-Khaled, K., Ananbeh, H.: New soliton solutions for systems of nonlinear evolution equations by the rational Sine–Cosine method. Stud. Math. Sci. 3(1), 1–9 (2011)
Baskonus, H.M., Askin, M.: Travelling wave simulations to the modified Zakharov–Kuzentsov model arising. In: Plasma Physics, 6th International Youth Science Forum “LITTERIS ET ARTIBUS” Computer Science and Engineering, Lviv, Ukraine, pp. 24–26 (2016)
Baskonus, H.M., Bulut, H.: Exponential prototype structure for (2+1)-dimensional Boiti–Leon–Pempinelli systems in mathematical physics. Waves Random Complex Media 26(2), 189–196 (2016)
Baskonus, H.M., Bulut, H., Atangana, A.: On the complex and hyperbolic structures of longitudinal wave equation in a magneto-electro-elastic circular rod. Smart Mater. Struct. 25(3), 035022 (2016)
Baskonus, H.M., Sulaiman, T.A., Bulut, H.: On the novel wave behaviors to the coupled nonlinear Maccari’s system with complex structure. Optik 131, 1036–1043 (2017)
Baskonus, H.M., Sulaiman, T.A., Bulut, H.: Investigations of dark, bright, combined dark-bright optical and other soliton solutions in the complex cubic nonlinear Schrödinger equation with \(\delta\)-potential. Superlattices Microstruct 115, 19–29(2018)
Bulut, H., Sulaiman, T.A., Baskonus, H.M.: New solitary and optical wave structures to the Korteweg–de Vries equation with dual-power law nonlinearity. Opt. Quant. Electron. 48(564), 1–14 (2016)
Bulut, H., Sulaiman, T.A., Demirdag, B.: Dynamics of soliton solutions in the chiral nonlinear Schrödinger equations. Nonlinear Dyn. 1–7 (2017). https://doi.org/10.1007/s11071-017-3997-9
Bulut, H., Sulaiman, T.A., Baskonus, H.M., Sandulyak, A.A.: New solitary and optical wave structures to the (1+1)-dimensional combined KdV–mKdV equation. Optik 135, 327–336 (2017)
Bulut, H., Sulaiman, T.A., Baskonus, H.M.: Dark, bright and other soliton solutions to the Heisenberg ferromagnetic spin chain equation. Superlattices Microstruct. (2017). https://doi.org/10.1016/j.spmi.2017.12.009
Bulut, H., Sulaiman, T.A., Baskonus, H.M., Akturk, T.: Complex acoustic gravity wave behaviors to some mathematical models arising in fluid dynamics and nonlinear dispersive media. Opt. Quant. Electron. 50, 19 (2018)
Cattani, C.: Harmonic wavelet solutions of the Schrodinger equation. Int. J. Fluid Mech. Res. 30(5), 1–11 (2003)
Cattani, C., Rushchitskii, Y.Y.: Cubically nonlinear elastic waves: wave equations and methods of analysis. Int. Appl. Mech. 39(10), 1115–1145 (2003)
Dehghan, M., Shakeri, F.: Application of He’s variational iteration method for solving the Cauchy reaction–diffusion problem. J. Comput. Appl. Math. 214, 435–446 (2008)
Eslami, M., Neyrame, A., Ebrahimi, M.: Explicit solutions of nonlinear (2+1)-dimensional dispersive long wave equation. J. King Saud Univ. Sci. 24(1), 69–71 (2012)
Eslami, M., Rezazadeh, H., Rezazadeh, M., Mosavi, S.S.: Exact solutions to the space–time fractional Schrödinger–Hirota equation and the space-time modified KDV–Zakharov–Kuznetsov equation. Opt. Quant. Electron. 49(8), 279 (2017)
Fang, J.P., Ren, Q.B., Zheng, C.L.: New exact solutions and fractal localized structures for the (2+1)-dimensional Boiti–Leon–Pempinelli system. Z. Naturforsch. 60, 245–251 (2005)
Haq, R.U., Soomro, F.A., Khan, Z.H., Al-Mdallal, Q.M.: Numerical study of streamwise and cross flow in the presence of heat and mass transfer. Eur. Phys. J. Plus 132, 214 (2017)
Inan, I.E., Kaya, D.: Exact solutions of some nonlinear partial differential equations. Phys. A 381, 104–115 (2007)
Khan, K., Akbar, M.A., Islam, S.M.R.: Exacts solutions for (1+1)-dimensional nonlinear dispersive modified Benjamin–Bona–Mahony equation and coupled Klein–Gordon equations. SpringerPlus, 3, 724 (2014)
Khan, K., Koppelaar, H., Akbar, A.: Exact and numerical soliton solutions to nonlinear wave equations. Comput. Math. Eng. 2, 5–22 (2016)
Ma, X., Pan, Y., Chang, L.: Explicit travelling wave solutions in a magneto-electro-elastic circular rod. Int. J. Comput. Sci. Issues 10(1), 62–68 (2013)
Mirzazadeh, M.: Modified simple equation method and its applications to nonlinear partial differential equations. Inf. Sci. Lett. 3(1), 1–9 (2014)
Momani, S., Abuasad, S.: Application of He’s variational iteration method to Helmholtz equation. Chaos Solitons Fractals 27(5), 1119–1123 (2006)
Naher, H., Abdullah, F.A.: The modified Benjamin–Bona–Mahony equation via the extended generalized Riccati equation mapping method. Appl. Math. Sci. 6(111), 5495–5512 (2012)
Nofal, T.A.: Simple equation method for nonlinear partial differential equations and its applications. J. Egypt. Math. Soc. 24, 204–209 (2016)
Noor, M.A., Noor, K.I., Waheed, A., Al-Said, E.A.: Some new solitonary solutions of the modified Benjamin–Bona–Mahony equation. Comput. Math. Appl. 62, 2126–2131 (2011)
Ozpinar, F., Baskonus, H.M., Bulut, H.: On the complex and hyperbolic structures for the (2+1)-dimensional Boussinesq water equation. Entropy 17(12), 8267–8277 (2015)
Rawashdeh, M.: Approximate solutions for coupled systems of nonlinear PDEs using the reduced differential transform method. Math. Comput. Appl. 19(2), 161–171 (2014)
Rizvi, S.T.R., Ali, K.: Jacobian elliptic periodic traveling wave solutions in the negative-index materials. Nonlinear Dyn. 87(3), 1967–1972 (2017)
Seadawy, A.R.: Fractional solitary wave solutions of the nonlinear higher-order extended KdV equation in a stratified shear flow: part I. Comput. Math. Appl. 70, 345–352 (2015)
Seadawy, A.R.: Ionic acoustic solitary wave solutions of two-dimensional nonlinear Kadomtsev–Petviashvili–Burgers equations in quantum plasma. Math. Methods Appl. Sci. 40, 1598–1607 (2017)
Seadawy, A.R., Lu, D., Khater, M.M.A.: Bifurcations of traveling wave solutions for Dodd–Bullough–Mikhailov equation and coupled Higgs equation and their applications. Chin. J. Phys. 55(4), 1310–1318 (2017)
Sulaiman, T.A., Akturk, T., Bulut, H., Baskonus, H.M.: Investigation of various soliton solutions to the Heisenberg ferromagnetic spin chain equation. J. Electromagn. Waves Appl. (2017). https://doi.org/10.1080/09205071.2017.1417919
Wang, M., Li, X.: Simplified homogeneous balance method and its applications to the Whitham–Broer–Kaup model equations. J. Appl. Math. Phys. 2, 823–827 (2014)
Wazwaz, A.M.: New (3+1)-dimensional nonlinear evolution equations with Burgers and Sharma–Tosso–Olver equations constituting the main parts. Proc. Rom. Acad. Ser. A 16(1), 32–40 (2015)
Weisstein, E.W.: Concise Encyclopedia of Mathematics, 2nd edn. CRC Press, New York (2002)
Xian-Lin, X., Jia-Shi, T.: Travelling wave solutions for Konopelchenko–Dubrovsky equation using an extended sinh-Gordon equation expansion method. Commun. Theor. Phys. 50, 1047 (2008)
Xue, C.X., Pan, E., Zhang, X.Y.: Solitary waves in a magneto-electro-elastic circular rod. Smart Mater. Struct. 20(10), 035022 (2011)
Yan, Z., Zhang, H.: New explicit and exact travelling wave solutions for a system of variant boussinesq equations in mathematical physics. Phys. Lett. A 252, 291–296 (1999)
Yokus, A., Baskonus, H.M., Sulaiman, T.A., Bulut, H.: Numerical simulations and solutions of the two component second order KdV evolutionary system. Numer. Methods Partial Differ. Equ. 34(1), 211–227 (2018)
Yokus, A., Sulaiman, T.A., Bulut, H.: On the analytical and numerical solutions of the Benjamin–Bona–Mahony equation. Opt. Quant. Electron. 50, 31 (2018)
Younis, M., Ali, S.: Bright, dark, and singular solitons in magneto-electro-elastic circular rod. Waves Random Complex Media 25(4), 549–555 (2015)
Zhang, W.: A generalized Tanh-function type method and the (G’/G)-expansion method for solving nonlinear partial differential equations. Appl. Math. 4, 11–16 (2013)
Zhao, Y.: F-expansion method and its application for finding new exact solutions to the Kudryashov–Sinelshchikov equation. J. Appl. Math. 2013, 895760 (2013)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Bulut, H., Sulaiman, T.A. & Baskonus, H.M. On the solitary wave solutions to the longitudinal wave equation in MEE circular rod. Opt Quant Electron 50, 87 (2018). https://doi.org/10.1007/s11082-018-1362-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-018-1362-y