
Abstract
In order to explore the displacement evolution of a creeping landslide stabilized with piles, an analytical model is proposed in this paper. Mechanical behaviors of the sliding surface and the sliding layer in the model are assumed to be visco-plastic and elastic, respectively. Equilibrium of a soil slice in the sliding layer is applied to establish the differential equation, which can be solved as a non-homogeneous heat equation. The displacement of the soil around stabilizing pile is considered as boundary condition at the bottom of the sliding layer, and the stress applied on the upper boundary of the sliding layer is assumed to be a constant. Therefore, the displacement solution of the sliding layer was obtained by solving the non-homogeneous heat equation with the mixed boundary conditions. Subsequently, the analytical model is validated against the monitoring data from Hongyan landslide in China. A good agreement between the measured displacement and the calculated displacement by the proposed model is obtained. Finally, the pile-stabilized region with respect to time, influences of stress distribution in the sliding layer, and the water table on the proposed model are discussed in this paper.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Long-term stability analysis of a creeping landslide is often based on the monitoring displacement data. After stabilization treatment, the landslide will slow down because of the interaction between the sliding layer and the piles. However, the displacement evolution of a pile-stabilized creeping landslide often shows a space–time characteristic, so displacement evolutions should be observed at different control points of the sliding layer. Therefore, different stability analysis results may be obtained based on the displacement data at different control points. As a result, it is of importance to investigate the mechanism of the space–time characteristic in order to give a reliable stability analysis result and a deep insight into the long-term displacement evolution of a creeping landslide after being stabilized with piles.
The long-term stability of slowly moving landslides has become an attractive topic since 1930s (Terzaghi 1936; Skempton 1964; Bjerrum 1967; Chandler 1974). In these studies, the researchers mainly focused on the progressive failure slopes without stabilizations. Importance of understanding the failure mechanism of a creeping landslide has been proved by many cases (Glastonbury and Fell 2008). The visco-plastic model has been proved to be an effective method to predict a creeping landslide motion without obstacle (Secondi et al. 2013; Butterfield 2000; Gottardi and Butterfield 2001). However, when a creeping landslide is constrained by either natural (a rock outcrop) or artificial (a retaining wall) objects at the landslide toe, it slows down (Bernander and Olofsson 1981; Wiberg et al. 1990; Puzrin and Sterba 2006; Puzrin and Schmid 2012). A simple analytical model, which can be used to quantify the displacement evolution of a creeping landslide stabilized by a retaining wall, has been established and validated by monitoring data (Puzrin and Schmid 2012). In this model, the soil displacement at the position of the retaining wall was assumed to be zero.
The stabilization mechanism of piles is different from that of a rock out crop or a retaining wall. The lateral force applied to the stabilizing piles highly depends on the relative movement between the soil and the piles (Ashour and Ardalan 2012). As a result, displacement-based numerical methods (Martin and Chen 2005; Poulos 1995; Kourkoulis et al. 2010, 2011) and theoretical method (Cai and Ugai 2010) have been widely used to investigate the pile–soil interaction. In these studies, the researchers mainly focused on the response of the piles, while the soil displacements of the whole sliding layer were not considered. Galli and di Prisco (Galli and di Prisco 2012) proposed a displacement-based numerical procedure for pile designing, the displacement rate of the landslide could be predicted after the stabilization. However, because of the assumption that the sliding layer was a rigid body, this method did not consider the displacement distribution along the length of the sliding layer.
The purpose of this paper was to find a theoretical method that can give an interpretation of the displacement evolution of a creeping landslide stabilized by piles. The visco-plastic model is used to model the sliding surface, the sliding layer is assumed to be elastic. A differential equation is established based on the equilibrium of a soil slice in the sliding layer. The displacement evolution of the soil around stabilizing pile, which is obtained by means of equilibrium of the pile–slope system, is considered to be the boundary condition at the bottom of the sliding layer. Combining the constant stress boundary condition at the upper end of the sliding layer, the displacement solution is obtained by solving the differential equation. The proposed model is validated against the monitoring data from Hongyan landslide in China. The pile-stabilized region with respect to time, influences of stress distribution in the sliding layer, and the water table on the proposed model are discussed in this paper.
2 The analytical model
2.1 Assumptions
Following assumptions are introduced to simplify the theoretical analysis (Puzrin and Schmid 2012).
-
(1)
Mechanical behaviors of the sliding surface are assumed to be visco-plastic, which follow the Mohr–Coulomb failure criteria characterized by friction angle and cohesion. Soil behavior in the sliding layer is assumed to be elastic.
-
(2)
The landslide displacement U(x, t) and effective normal stresses p(x, t) are assumed to be parallel to the slope and uniformly distributed with the depth, respectively. Before stabilization, effective stress p 0 and velocity v 0 was assumed to be constant, and both uniformly distributed along the landslide length. At the moment of landslide stabilization, the landslide displacement is taken as a reference, that is U(x, 0) = 0.
-
(3)
After stabilization, the velocities in the sliding layer begin to gradually decrease. The soil displacement around the stabilizing pile, which is a function of time and denoted as f(t), becomes the boundary condition at the bottom of the sliding layer for further landslide evolution. The sliding layer is assumed to be a rigid body in order to determine the relationship between the soil displacement around the pile and the resistance force provide by the pile (Galli and di Prisco 2012). The stress at the upper boundary of the sliding layer remains constant during the landslide evolution p(L, t) = p 0, where L is the distance between the upper boundary and the boundary at the bottom of the sliding layer.
2.2 Displacement-governing equation
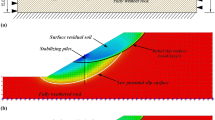
The schematic layout of a landslide stabilized by a pile is shown in Fig. 1, in which A is the resistance force provided by the stabilizing pile. The mechanical behavior of the sliding surface is assumed to be viscous/perfectly plastic, with Mohr–Coulomb failure criteria characterized by friction angle and cohesion [hypothesis (1)]. Therefore, the shear strength on the sliding surface can be expressed as

Schematic view of the sliding layer stabilized by pile
where τ is the shear strength of soil on the sliding surface, γ is the unit weight of the sliding layer, H is the depth of the sliding layer, α is the inclination of the sliding surface, φ is the friction angle of soil on the sliding surface, c is the cohesion of soil on the sliding surface, η is the viscosity coefficient, ∂U/∂t is the velocity of the sliding layer. The first and second terms on the right side of Eq. (1) is the shear strength provided by friction angle and cohesion, and the third term is the shear strength attribute to the viscous behavior of soil on the sliding surface.
In the sliding layer, soil behavior is assumed to be elastic [hypothesis (1)], and constant effective stress is assumed along the landslide length before the landslide being stabilized [hypothesis (2)]. As a result, the stress in the sliding layer under the action of the displacement of sliding layer can be expressed as
where E is the elastic modulus of soil in the sliding layer. Because the model is established to study the long-term displacement evolution of a creeping landslide after being stabilized, the drained condition is considered here.
Equilibrium of a soil slice in the sliding layer, as shown in Fig. 2, can be expressed as

Equilibrium of a soil slice in the sliding layer
Substituting Eq. (2) into Eq. (3), the displacement differential equation for a pile-stabilized landslide can be obtained
where \(C = \frac{\text{HE}}{\eta }\).
According to hypothesis (3), the boundary conditions are given by the soil displacement around the stabilizing pile at the bottom of the sliding layer and constant stress with respect to time at the upper boundary of the sliding layer
where f(t) is the soil displacement around the stabilizing pile, Eq. (5b) is obtained according to Eq. (2). Zero reference displacement at the moment of stabilization is the initial condition according to hypothesis (2)
As Puzrin and Schmid (Puzrin and Schmid 2012) pointed out, Eq. (4) can be recognized as a non-homogeneous heat equation, which in combination with the boundary conditions in Eq. (5a) produces a non-homogeneous mixed boundary value problem (BVP). Before solving this problem, the function f(t) should be determined in order to establish a particular solution for a homogeneous differential equation.
2.3 Determination of f(t)
In this stage, the sliding layer is considered to be a rigid body [hypothesis (3)], which is a simplified hypothesis. Therefore, the sliding layer moves down slope with a unique velocity ∂U(x,t)/∂t. By applying a limit equilibrium analysis to the whole sliding layer shown in Fig. 1, the following equation can be obtained
where L is the distance between the upper boundary and the boundary at the bottom of the sliding layer, S is the center to center pile spacing, δ(L, S) is an efficiency coefficient in pile groups under laterally loaded (Poulos 1975, 1979; Rollins et al. 1998, 2005; Reese and Van Impe 2001), A(U) is the lateral load characteristic function with respect to the free-field soil displacement U (Galli and di Prisco 2012).
Integrating Eq. (7) with time t, and combining the initial condition in Eq. (6), the soil displacement around stabilizing pile f(t) can be obtained
2.4 Solution
Substituting Eq. (8) into Eq. (5a), the boundary condition for the non-homogeneous heat equation [Eq. (4)] can be expressed as
The solution for Eq. (4) with the boundary conditions in Eq. (9a, 9b) can be obtained as a superposition of two solutions of two simplified BVPs
where U p(x, t) is a particular solution of a homogeneous heat equation
with boundary conditions in Eq. (9a, 9b), U g(x, t) is the general solution of the differential Eq. (4), with mixed boundary conditions
and initial condition according to Eq. (10)
A particular solution satisfying both the differential Eq. (11) and boundary conditions in Eq. (9a,) is given by
In order to find the solution of U g(x,t), it is more convenient to fictitiously expand the landslide length to 2L. The boundary conditions in Eq. (12a, 12b) is transformed into the first BVP by imposing the boundary conditions
In this case, the boundary condition in Eq. (12b) is satisfied automatically, owing to the symmetry of the solution with respect to x = L.
The initial condition is being extended to the fictitious part
The solution of the first BVP for the non-homogeneous heat Eq. (4) is given by
where ξ and T are integration variables for space and time, respectively, and
is the Green function for the first BVP.
Integrating Eq. (17) produces
It can be seen that Eq. (18) satisfies the boundary conditions in Eqs. (15a, 15b).
For n = 2, 4, 6, …, the sum in Eq. (18) is equal to zero. Therefore, Eq. (18) can be rewritten as
The solution of U(x, t) can be expressed as
Equation (20) can be approximated by the following equation
Simplification of Eq. (21), the displacement solution is
Taking the derivative of Eq. (22) with respect to time, the velocity can be obtained
As an alternative method, when the specific function of the displacement around the soil f(t) can be obtained by displacement monitoring in the practical engineering, Eq. (4) can be solved by such specific solution that satisfies both of Eq. (4) and the boundary conditions in Eqs. (5a, 5b).
3 Application of the model
3.1 Project summary
The Hongyan landslide is located at Hongyan (longitude 120°30′E, latitude 28°52′N) of Xianju County in China. The full view of the landslide is shown in Fig. 3. The landslide is triggered by the excavation of the slope toe during the construction of Zhuyong (S26) expressway. The sliding layer is composed of yellowish-gray clay with gravel contents, covering a bed of tuff rock, as shown in Fig. 4. The length of the landslide is 135.0 m (from the stabilizing pile to the crack in the upper part of the slope). The average thickness and width of the landslide are 20.0 and 110.0 m, respectively. The average inclination of the sliding surface is 30°. The parameters based on geological survey report are shown in Table 1. The friction angle and cohesion of the sliding surface are determined by quick shear tests, in which drain condition is not considered. As a result, the normal stress and shear stress measured in the quick shear tests are total stresses, which are the sum of effective stress and pore water pressure. In the Mohr–Coulomb model, the friction angle and cohesion can be obtained from a best linear fit of the data plotted in normal and shear stress space. The elastic modulus and viscous coefficient are unknown. They are obtained by back calculation, and the details will be shown later.

The overview of Hongyan landslide

The cross-section A–A’ shown in Fig. 3
Figure 5 shows the displacement evolutions (from 13 Jan 2009 to 12 Jan 2012) at point 4, point 13, and point 18. The displacements at point 4, point 13, and point 18 began to increase with a constant velocity after the excavation of the slope toe, which means the landslide was activated. In order to guarantee the safety of the project and workers, the excavation was stopped and a row of stabilizing piles was constructed in Jun 2009. Construction of the stabilizing piles was completed at 12 Nov 2009. In Fig. 5, it can be seen that the velocities decreased and the displacement tended to be stable at points 4, 13, and 18 during the construction of the stabilizing piles. The slope toe excavation continued to be extruded immediately after stabilizing pile being installed. The displacement increased again and the velocities were larger than that before the installation of the stabilizing piles, which means the landslide was reactivated. After about 9 months, the displacements tended to be stable under the action of the piles. As a result, all the piles were considered to stabilize the landslide at 12 Nov 2009, when the landslide was reactivated after the excavation of the slope toe. At points 4, 13, and 18, the displacement values with respect to 12 Nov 2009 were considered to be the initial values of the displacement evolutions after the landslide being stabilized by the piles. The differences between the displacements after 12 Nov 2009 and the initial values with respect to 12 Nov 2009 are selected as the displacement data, which are used to validate the model proposed in this paper.

Displacement evolutions at points 4, 13 and 18 after the Hongyan landslide being activated
The stabilizing piles used in Hongyan landslide are reinforced concrete piles with rectangular cross-section. The width (parallel to the pile row direction) and height (perpendicular to the pile row direction) of the rectangular cross-section are 2.0 and 3.0 m, respectively. C30 concrete is used to build the piles. The displacement at the top of No. 10 stabilizing pile is monitored by the electronic total station. By assuming a triangular distribution of the lateral force on the pile segment in the sliding layer, a relationship between the displacement at the pile top and the lateral force per unit width on the pile segment in the sliding layer is obtained based on the elastic foundation beam method. As a result, the lateral force per unit width of No. 10 stabilizing piles can be obtained according to the relationship in which the displacements at the pile top are utilized as input data (Yu et al. 2012). The resistance force acting on No. 10 stabilizing pile can be obtained by integrating the distributed forces along the length of No. 10 stabilizing pile in the sliding layer. The resistance force with respect to time is shown in Fig. 6.

Resistance force evolution of No. 10 stabilizing pile
A(U) is a function of free-field soil displacement, which be calculated by numerical simulation combined with p-y curve method (Galli and di Prisco 2012). In practice, the free-field soil displacement is a function of time, which is denoted as U(t). Substituting the relationship between the free-field soil displacement and the time into the lateral load characteristic function with respect to free-field displacement, the lateral load characteristic function A(U) converts to a function with respect to time, which can be denoted as A(U(t)). We assume that the sliding layer will move down slope with a constant velocity if there is no pile to stabilize the landslide after its reactivation. As a result, it is a linear relationship between the free-field displacement of the sliding layer and time t. The resistance force of No. 10 stabilizing pile is obtained based on monitoring data, which means the efficiency coefficient has been considered. Therefore, the term δ(L, S)A(U) is replaced with A(U(t)) in this case.
In some cases, the distribution of the lateral force along the depth of stabilizing pile may be rectangular or trapezoidal, which will lead to different resultant force evolutions with respect to time or free-field displacement of the sliding layer. Because the points of action of the rectangular- and trapezoidal-distributed lateral forces are higher than that of triangular-distributed lateral force, smaller resultant lateral force will be obtained based on the same monitoring displacement at the pile top and the elastic foundation beam method in the research of Yu et al. (2012). As a result, the velocity and displacement of the sliding layer for the rectangular- and trapezoidal-distributed lateral force will be larger than that of the triangular-distributed lateral force according the model proposed in this paper.
3.2 Determination of the unknown parameters
Monitor points 4 and 13 are in the same cross profile with No. 10 stabilizing pile. Point 4 is 122 m from the No. 10 stabilizing pile and point 13 is 66 m from the No. 10 stabilizing pile. The distances are calculated based on the coordinate of the monitoring points in the total station system. Displacement data of point 4 and point 13 are used to validate the model. Point 18, which is 41 m from No. 10 stabilizing pile, is chosen to back calculating the unknown soil parameters in Table 1. The procedures are
-
(1)
Obtain the average value of the displacement of the last month in the monitoring period at point 18.
-
(2)
Substitution of the monitoring dates into Eq. (22), and giving a set of C and η. If the sum of the right terms in Eq. (22) is equal to the average displacement obtained in step 1, the set of C and η is selected as the back calculating result.
-
(3)
After step 2, elastic modulus E can be determined according to the equation C = HE/η.
According to the above-mentioned procedures, the unknown parameters in Table 1 are obtained. C, η and E are equal to 88 m2/d, 3,600 kN·d/m3, 15.84 MPa, respectively. A good fitted result at point 18 is obtained and shown in Fig. 7. Together with the parameters in Table 1, all the input data for the proposed model, which is used to calculate the displacement at points 4 and 13, have been obtained.

Displacement-fitted results at point 18
Figures 8 and 9 show the comparisons between predicted and measured displacements of point 13 and point 4, respectively. The measured displacements of point 13 and point 4 are well consistent with the displacements calculated by the proposed model.

Comparison between measured and calculated displacements at point 13

Comparison between measured and calculated displacements at point 4
The displacement distribution of the Hongyan landslide at 50, 100, 150, 300, and 350 days is shown in Fig. 10. The soil displacement around the stabilizing pile is also developed with respect to time, which is the reason for the development of lateral forces between the pile and soil.

Displacement distribution along the sliding layer at different time
4 Discussion
4.1 Stabilized region of the piles
The second term of the right part in Eq. (23) is the contribution of stabilizing pile to the decrease in displacement rate. The sum in the square brackets in Eq. (23) is denoted as κ(x,t), for the sake of simplicity. In the view of mathematics, κ(x,t) can be larger than zero for certain values of x if the following condition is satisfied
Take Hongyan landslide as an example, in which C is equal to 88 m2/d. When t < 20 days, Eq. (24) is satisfied. The values of κ(x,t) with respect to x are shown in Fig. 11 when t is equal to 10, 20 and 30 days. It can be seen that for t < 20 days, there is a certain value for x beyond which κ(x, t) is larger than zero. The region with positive value of κ(x, t) means the effect of stabilizing pile has not reached the region. As time going, the whole slope is stabilized by the piles after 20 days, because κ(x, t) is negative along the whole length of the sliding layer.

Values of κ(x, t) along the sliding layer (C = 88 m2/d)
Figures 12 and 13 show the values of κ(x,t) with respect to x when C is equal to 44 and 22 m2/d, which means a smaller elastic modulus of the sliding layer or a larger viscous coefficient of the sliding surface.

Values of κ(x, t) along the sliding layer (C = 44 m2/d)

Values of κ(x, t) along the sliding layer (C = 22 m2/d)
As C becomes smaller, time for the piles to stabilize the whole sliding layer becomes longer and the region stabilized by the piles becomes smaller.
4.2 Influence of the stress distribution in the sliding layer
The model proposed in this paper is established under the assumption that the stress p(x, t) in the sliding layer is uniformly distributed with the depth, which is a hypothesis for the sake of simplifying the theoretical analysis. In practice, the stresses are not uniformly distributed with depth for example a linear increasing distribution or with other nonlinear relationships with depth. The distribution shape of stresses p(x, t) is dependent on the distribution shape of p 0 according to Eq. (2). In this paper, p 0 is assumed to be uniformly distributed along the landslide length before stabilization. Therefore, p 0 is a function of the depth and is irrelevant to x. In Eq. (3), the equilibrium of a soil slice in the sliding layer is established by differentiating the stress p(x, t) with respect to x. It can be found that Eq. (4) can also be obtained because the differentiation of p 0 with respect to x is equal to zero. The boundary conditions are in the form of displacement and are irrelevant to p 0. As a result, the distribution shape of the stresses p(x, t) and p 0 will not affect the results of the proposed model in this paper. The uniform distribution of the stresses with depth is only for the sake of simplifying the theoretical analysis.
4.3 Influence of the water table
The surface of the Hongyan landslide is concreted in order to prevent water infiltrating into the sliding layer. Intercepting ditches along the boundary of the landslide and drainage holes in the sliding layer are also set in order to decrease the influence of the underground water. After stabilization, the water table is not found in the sliding layer. As a result, the influence of water table is not considered in this paper. However, many landslides are triggered by the fluctuation of the water table in the sliding layer. Considering the model proposed in this paper [Eq. (23)], when the water table is located in the sliding layer, it will increase the velocity of the landslide in two aspects. The first aspect is that the unit weight of the sliding layer increases. The second aspect is that the water seepage will induce additional thrust on the stabilizing pile, which will increase the deformation of the stabilizing pile and the sliding layer.
5 Conclusions
An analytical model is established to explore the displacement evolution of a creeping landslide stabilized by piles. The creeping feature is considered by assuming a visco-plastic sliding surface. The effect of stabilizing pile is considered by setting the soil displacement around the piles as the boundary condition of the differential equation. The displacement solution with respect to space and time is obtained through solving a non-homogeneous heat equation with mixed boundary conditions.
The model is validated against the monitoring data from Hongyan landslide in China. Because some parameters are unknown in this project, monitoring data at one control point is used to back calculate these parameters. The data at the other two control points are used to validate the model, and a good agreement between the calculated and measured displacements is obtained, which proves that the model can be used to give an interpretation for the long-term displacement evolution of a creeping landslide stabilized by piles.
The model shows that for a sliding layer with low elastic modulus or sliding surface with high viscous coefficient, it needs more time for stabilizing piles to stabilize the whole sliding layer. The smaller the value of C, the smaller of the stabilized region along the sliding surface is. It is also found that the distribution shape of the stresses in the sliding layer have no influence on the solution of the proposed model, and the presence of the water table in sliding layer will increase the velocity of the landslide.
References
Ashour M, Ardalan H (2012) Analysis of pile stabilized slopes based on soil–pile interaction. Comput Geotech 39:85–97
Bernander S, Olofsson I (1981) On formation of progressive failure in slopes. In: Proceeding of the 10th International Conference on Soil Mechanics and Foundation Engineering (ICSMFE), Stockholm, Sweden, 1981. pp 15–19
Bjerrum L (1967) Progressive failure in slopes of overconsolidated plastic clay and clay shales. J Soil Mech Found Div 93:1–49
Butterfield R (2000) A dynamic model of shallow slope motion driven by fluctuating ground water levels. In: Proceedings of the 8th International Symposium on Landslides. Thomas Telford, London, vol 1, pp 203–208
Cai F, Ugai K (2010) A subgrade reaction solution for piles to stabilise landslides. Géotechnique 61(2):143–151
Chandler RJ (1974) Lias clay: the long-term stability of cutting slopes. Géotechnique 24:21–38
Galli A, di Prisco C (2012) Displacement-based design procedure for slope-stabilizing piles. Can Geotech J 50(1):41–53
Glastonbury J, Fell R (2008) Geotechnical characteristics of large slow, very slow, and extremely slow landslides. Can Geotech J 45(7):984–1005
Gottardi G, Butterfield R (2001) Modelling ten years of downhill creep data. In: Proceedings of the Fifteenth international conference on soil mechanics and geotechnical engineering, Istanbul, Turkey, 27–31 August 2001. Volumes 1–3., 2001. AA Balkema, pp 99–102
Kourkoulis R, Gelagoti F, Anastasopoulos I, Gazetas G (2010) Slope stabilizing piles and pile-groups: parametric study and design insights. J Geotech Geoenvrion Eng 137(7):663–677
Kourkoulis R, Gelagoti F, Anastasopoulos I, Gazetas G (2011) Hybrid method for analysis and design of slope stabilizing piles. J Geotech Geoenvrion Eng 138(1):1–14
Martin G, Chen C-Y (2005) Response of piles due to lateral slope movement. Comput Struct 83(8):588–598
Poulos HG (1975) Lateral load-deflection prediction for pile groups. J Geotech Eng Div 101(1):19–34
Poulos HG (1979) Group factors for pile-deflection estimation. J Geotech Eng Div 105(12):1489–1509
Poulos HG (1995) Design of reinforcing piles to increase slope stability. Can Geotech J 32(5):808–818
Puzrin AM, Schmid A (2012) Evolution of stabilised creeping landslides. Géotechnique 62(6):491–501
Puzrin A, Sterba I (2006) Inverse long-term stability analysis of a constrained landslide. Géotechnique 56(7):483–489
Reese LC, Van Impe WF (2001) Single piles and pile groups under lateral loading. CRC Press, Boca Raton
Rollins KM, Peterson KT, Weaver TJ (1998) Lateral load behavior of full-scale pile group in clay. J Geotech Geoenvrion Eng 124(6):468–478
Rollins KM, Lane JD, Gerber TM (2005) Measured and computed lateral response of a pile group in sand. J Geotech Geoenvrion Eng 131(1):103–114
Secondi MM, Crosta G, di Prisco C, Frigerio G, Frattini P, Agliardi F (2013) Landslide motion forecasting by a dynamic visco-plastic model. In: Landslide science and practice. Springer, pp 151–159
Skempton A (1964) Long-term stability of slopes. Géotechnique 14(2):75–102
Terzaghi K (1936) Stability of slopes of natural clay. In: Proceedings of the 1st International Conference of Soil Mechanics and Foundations, 1936. pp 161–165
Wiberg NE, Koponen M, Runesson K (1990) Finite element analysis of progressive failure in long slopes. Int J Numer Anal Methods Geomech 14(9):599–612
Yu Y, Shang Y-q, Sun H-y (2012) Bending behavior of double-row stabilizing piles with constructional time delay. J Zhejiang Univ Sci A 13(8):596–609
Acknowledgments
This project was supported by the National “Twelfth Five-Year” Plan for Science & Technology Support Program of China (Grant No. 2012BAK10B06) and National Natural Science Foundation of China (Grant No. U1361103), which are gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Yu, Y., Shang, Yq., Sun, Hy. et al. Displacement evolution of a creeping landslide stabilized with piles. Nat Hazards 75, 1959–1976 (2015). https://doi.org/10.1007/s11069-014-1406-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11069-014-1406-y