
Abstract
The convection and planetary boundary layer (PBL) processes play significant role in the genesis and intensification of tropical cyclones (TCs). Several convection and PBL parameterization schemes incorporate these processes in the numerical weather prediction models. Therefore, a systematic intercomparison of performance of parameterization schemes is essential to customize a model. In this context, six combinations of physical parameterization schemes (2 PBL Schemes, YSU and MYJ, and 3 convection schemes, KF, BM, and GD) of WRF-ARW model are employed to obtain the optimum combination for the prediction of TCs over North Indian Ocean. Five cyclones are studied for sensitivity experiments and the out-coming combination is tested on real-time prediction of TCs during 2008. The tracks are also compared with those provided by the operational centers like NCEP, ECMWF, UKMO, NCMRWF, and IMD. It is found that the combination of YSU PBL scheme with KF convection scheme (YKF) provides a better prediction of intensity, track, and rainfall consistently. The average RMSE of intensity (13 hPa in CSLP and 11 m s−1 in 10-m wind), mean track, and landfall errors is found to be least with YKF combination. The equitable threat score (ETS) of YKF combination is more than 0.2 for the prediction of 24-h accumulated rainfall up to 125 mm. The vertical structural characteristics of cyclone inner core also recommend the YKF combination for Indian seas cyclones. In the real-time prediction of 2008 TCs, the 72-, 48-, and 24-h mean track errors are 172, 129, and 155 km and the mean landfall errors are 125, 73, and 66 km, respectively. Compared with the track of leading operational agencies, the WRF model is competing in 24 h (116 km error) and 72 h (166 km) but superior in 48-h (119 km) track forecast.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The North Indian Ocean (NIO), including Bay of Bengal (BoB) and Arabian Sea (AS), is one of the important basins contributing about 7% of total tropical cyclones (TCs) over the world (WMO technical report 2008). The frequency of the TCs in general and landfalling TCs in particular is more frequent over the BoB with the development of about 4 TCs per year and hence cause more disasters than the AS TCs (IMD 2008). Though the frequency is relatively less over NIO, out of 10 recorded deadliest cases with very heavy loss of life (ranging from about 5,000 to well over 300,000) over the world, eight cases were formed in the BoB and AS (WMO technical report 2008) in the past 300 years. It may be attributed to many factors including shallow bathymetry, poor socio-economic conditions, and large population density along the coast, apart from relatively higher track forecast errors. Hence, reasonably accurate prediction of track, intensity, and associated storm surges of these devasting storms at least in 48 h advance would be highly desirable for planning and implementation of the mitigation measures effectively and hence reduction of loss of life and property considerably.
Though there has been significant development in the field of TC track prediction over this basin by various global and mesoscale models (RSMC Report 2010), there is still need for further improvement in its performance considering diversity and inconsistency in numerical weather prediction (NWP) guidance. There have been many attempts to improve up on the models through grid resolution, physical parameterizations, and data assimilation, etc. Among all, the physical parameterizations, which includes cumulus convection, surface fluxes of heat, moisture, momentum, and vertical mixing in the planetary boundary layer (PBL) play important role in the development and intensification of TCs (Anthes 1982). Among all, PBL and convection have long been recognized as processes of central importance in the genesis and intensification of TCs. In recent years, it has been realized that the PBL is a critical factor (Braun and Tao 2000) because of generation of the large fluxes of heat, moisture, and momentum in this thin layer. Therefore, several PBL parameterization schemes (PBLSs) have been incorporated in the NWP models (e.g., Mellor and Yamada 1982; Hong et al. 2006). In addition, turbulent eddies in the PBL transport moisture into the free convection regime and thus favor intensification of TCs. As the scale of convective clouds is too small to be resolved by numerical models, a wide variety of cumulus parameterization schemes (CPSs) have also been developed and incorporated into three-dimensional mesoscale models (e.g., Kuo 1974; Arakawa and Schubert 1974; Anthes 1977; Betts and Miller 1986; Kain and Fritsch 1993; Grell 1993, etc.). Most of the above schemes evaluated for a specific convective environment (Grell 1993; Kuo et al. 1996). Hence, the general applicability of these schemes to any geographical environment is not obvious. Therefore, a systematic intercomparison of performance of these parameterization schemes is essential to customize a mesoscale model to examine (1) how well do these schemes perform in a mesoscale model under a variety of intense convective conditions and (2) consistency in the performance of these schemes in different geographical environments?
Yang and Cheng (2005) studied the sensitivity of typhoon Toraji to different parameterization schemes of MM5 model and reported that the Grell convection scheme and Goddard Microphysics explicit moisture schemes could provide the best track, whereas the warm rain scheme yielded the lowest central surface pressure. Rao and Bhaskar Rao (2003) showed that the intensity of the Orissa super cyclone is underestimated with Grell, MRF, and Simple-Ice schemes of MM5. Mandal et al. (2004) simulated two TCs over BoB using different physical parameterization schemes of MM5 model and concluded that MRF PBL and Grell convection schemes could predict better track and intensity up to 48 h. Bhaskar Rao and Hari Prasad (2007) also studied the sensitivity of TC intensification to boundary layer and convective processes with MM5 model but their study confined to only one case (Orissa super cyclone over BoB during 1999).
Considering all the above, a study has been undertaken to examine the performance of various convection and PBL schemes for Indian seas TCs. A nonhydrostatic version of Advanced Research Weather Research and Forecasting (ARW-WRF, hereafter WRF) model is used for this purpose. The main objective of the study is to determine the most suitable model parameterization schemes for the simulation of the TCs over Indian seas. Section 2 provides the brief description of modeling system and physical parameterization schemes used in this study. The methodology given in Sect. 3 describes the overview of data used, experimental domain configuration, and numerical experiments. The results are presented and discussed in Sect. 4, while the broad conclusions are presented in Sect. 5.
2 Description of model
The high-resolution mesoscale model WRF (Vesion 2.2) used in the present study is an outgrowth of a research model developed at National Center for Atmospheric Research (NCAR) by collaborating with other research institutes/universities. A detailed description of the model equations, physics, and dynamics is available in Dudhia (2004) and Skamarock et al. (2005).
2.1 PBLSs
The Yonsei University (YSU, Hong et al. 2006) PBL scheme is using the counter-gradient terms to represent fluxes due to nonlocal gradients. The YSU scheme is a first-order closure scheme that is similar in concept to the scheme of Hong and Pan (1996), but appears less biased toward excessive vertical mixing as reported by Braun and Tao (2000). The drag formulation follows Charnock (1955), the surface exchange coefficient for water vapor follows Carlson and Boland (1978), and the heat flux uses a similarity relationship (Skamarock et al. 2005).
The second PBL Scheme is Mellor Yamada and Janjic (MYJ) (Mellor and Yamada 1982; Janjic 2003), which predicts TKE and has local vertical mixing. The top of the layer depends on the TKE as well as the buoyancy and shear of the driving flow.
2.2 CPSs
The Kain (2004), Kain and Fritsch (1993) scheme (KF) uses a mass-conserving, one-dimensional entraining-detraining plume model that parameterizes updrafts as well as downdrafts. Mixing is allowed at all vertical levels through entrainment and detrainment. This scheme removes convective available potential energy (CAPE) through vertical reorganization of mass at each grid point. The scheme consists of a convective trigger function (based on grid-resolved vertical velocity), a mass-flux formulation, and closure assumptions.
The second scheme, Betts Miller and Janjic (Betts and Miller 1986; Janjic 1994) scheme (BMJ) is an adjustment-type scheme that forces soundings at each point toward a reference profile of temperature and specific humidity. The scheme’s structure favors activation in cases with substantial amounts of moisture in low- and mid-levels and positive CAPE. The representation is accomplished by constraining the temperature and moisture fields by the convective cloud field.
The third scheme, Grell and Devenyi (2002) parameterization scheme (GD) is an ensemble cumulus scheme in which effectively multiple cumulus schemes of mass-flux type are employed, but with differing updraft and downdraft entrainment and detrainment parameters, and precipitation efficiencies. The dynamic control closures are based on CAPE, low-level vertical velocity, or moisture convergence. Another control is the trigger, where the maximum cap strength that permits convection can be varied.
3 Methodology
To fulfill the objective of the study, the three convection and two PBL schemes of WRF model are customized for simulation of TCs over Indian seas and their performance is tested by simulating the four 2008 TCs over BoB in near real time using the resultant combination of parameterization schemes. The Kain–Fritsch, Betts–Miller–Janjic, and Grell–Devenyi schemes are hereafter referred as KF, BM, and GD schemes, respectively. The YSU and MYJ scheme are hereafter referred as Y and M, respectively.
For the customization study, a series of six experiments are carried out with six possible combinations of three CPSs and two PBLSs, keeping the WSM 3-class micro physics scheme (Hong et al. 2004) same. All the six experiments with the combination of these schemes and name of the experiments are given in Table 1. Five TCs during 2005–2007 namely Sidr (November 11–16, 2007), Gonu (June 2–8, 2007), Akash (May 13–15, 2007), Mala (April 26–29, 2006), and the cyclone during October 1–3, 2005 are considered in this study. All the cyclones are integrated up to landfall, and Table 2 describes the time of initialization and the forecast length. The initial and boundary conditions are obtained from National Centers for Environment Prediction (NCEP) Final (FNL) analyses (1° × 1° grid resolutions).
For evaluation experiments, four TCs of BoB during 2008 namely Nargis (April 26–May 3), Rashmi (October 24–27), KhaiMuk (November 13–16), and Nisha (November 24–27) are simulated with the optimum combination of physical parameterization schemes achieved from customization study. All the 2008 TCs are unique in nature with typical characteristics like recurvature (Nargis), rapid weakening over orographically dominant region (Rashmi), weakening of TC over the sea itself before landfall (KhaiMuk), and quasi-stationarity (Nisha) near the coast before landfall. Table 3 describes the details of the total experiments in evaluation study. The NCEP Global Forecasting System (GFS) analyses and forecast products (in 0.5° × 0.5° resolution) available in near real time are used as initial and boundary conditions to the model, respectively. All the TCs are simulated on real-time basis in 12-h cycle (twice a day), and the forecast is provided to India Meteorological Department (IMD).
The single domain is fixed between 78°E–103°E and 3°N–28°N for BoB TCs and 48°E–78°E and 5°N–30°N for AS TCs with 27-km horizontal grid resolution. It has 51 terrain-following hydrostatic pressure vertical (σ) levels. The σ levels are placed close together in the low levels (12 levels below 850 hPa and 22 levels below 500 hPa) and are relatively coarser above. The grid staggering is Arakawa C-grid. The complete model configuration with all the specifications is given in Table 4. Except different combinations of PBLSs and CPSs for customization study and the initial conditions for model evaluation study, the model configuration is kept identical in all aspects for all the experiments.
All the model-simulated results are compared with the best track of TCs prepared by IMD (RSMC, New Delhi, 2009). The model rainfall is compared with Tropical Rainfall Measuring Mission (TRMM 3B42-V6) rainfall analyses. In the quantitative analysis of model rainfall, two skill scores equitable threat score (ETS) and bias are employed. The method proposed by Schaefer (1990) has been followed to calculate forecast accuracy, where
In the above equations,
-
CFA = rainfall was correctly forecast to exceed the specified threshold
-
F = rainfall was forecasted to exceed the threshold
-
O = rainfall was observed to exceed the threshold
-
CHA = correct forecast would occur by chance
-
N = the total number of evaluated grid points;
An ETS of 1 would occur with a perfect forecast, with lower values showing a less forecast accuracy. Bias varies from 0 to 1, and if the values of bias higher than 1 indicate that the model notably over-predicted areal coverage. Vice versa, bias values smaller than 1 mean that the model did not produce enough areas with rainfall exceeding a particular amount.
4 Results and discussions
This section is divided into two parts. Section 4.1 presents the results and discussions regarding customization study of physical parameterization schemes, and Sect. 4.2 presents the evaluation of out-coming combination from customization study. Finally in Sect. 4.3, the WRF-simulated tracks are compared with those of leading operational forecasting centers.
4.1 Customization of WRF model
The impact of physical parameterization schemes on intensity and track is presented in Sect. 4.1.1, while the qualitative and quantitative prediction of 24-h accumulated rainfall is provided in Sect. 4.1.2. The kinematic and thermodynamic structure of the cyclone is discussed in Sect. 4.1.3.
4.1.1 Intensity and track prediction
Figure 1 gives the time series of intensity in terms of central sea level pressure (CSLP, hPa) and 10-m maximum surface wind (10-m wind, m s−1) and mean RMSE of CSLP (hPa) and 10-m wind speed (m s−1) for six combinations under consideration. All the figures clearly indicate that the KF scheme with both PBLSs (YSU and MYJ) simulates the cyclone intensity and its trend of intensification and decay in terms of CSLP and 10-m wind, while BM and GD totally fail to simulate intensity. In cyclone Sidr (Fig. 1a), no scheme could capture the realistic intensity but YKF is better compared with the remaining schemes. In cyclone Gonu (Fig. 1b), only YKF combination succeeds in simulating the realistic storm intensity compared with other combinations, though the trend of evolution of intensity is not captured. In case of TC Mala, only YKF simulates the peak intensity 941 hPa with the time error of 3 h compared with the IMD observed peak intensity of 954 hPa at 06 UTC of April 28, 2006. The YKF stands better for the remaining TCs (Akash and 2005 Oct 1–3) also. The mean root mean square error (RMSE) of intensity (Fig. 1c) clearly depicts that the YKF combination shows the least error (13 hPa and 11 m s−1) as compared to the remaining combinations. Further, it is also clear that the KF convection scheme is better compared with minimum RMSE of 14 hPa and 12.5 m s−1 to BM and GD schemes. The YSU PBL scheme shows marginally less intensity error. The Mean RMSE of intensity in terms of CSLP (10-m wind) with YSU scheme is 18 hPa (14 m s−1), while the MYJ scheme is 20 hPa (16 m s−1).

Time series of TC intensity in terms of CSLP (hPa) and 10-m wind speed (m s−1) for (a) Mala, (b) Akash, (c) Gonu, (d) Sidr, (e) 2005 Oct 1–3. (f) Mean RMSE of CSLP (hPa, histograms) and 10-m wind speed (m s−1, line) for the six combinations [ddhh represents date hour]
Figure 2a–f gives the tracks of the six cyclones from six different combinations of physical parameterization schemes along with IMD best track. From these figures, it is clear that only YKF experiment predicts the tracks well in all the cyclone cases. In the case of Gonu (Fig. 2b), YGD also simulates the track well initially but as the forecast length increases, the system moves northward resulting higher landfall error. In the remaining cases (Fig. 2a, c–e) along with YKF, MKF experiment also seems to be better in track prediction. However, as the MKF-simulated tracks have slow movement and deviated from the observed track, the position error at each time becomes more than that in YKF. To analyze it further, the vector displacement errors (VDEs) in 12-h interval have been calculated and analyzed. Figure 2f gives the mean VDEs of five cyclones for six combinations. For the six experiments of each TC, the initial and boundary conditions are provided from FNL analyses and hence the initial vortex position error is same (about 80 km). So, in Fig. 2f, only forecast track errors are presented. It is very clear that the YKF experiment shows less VDEs ranging from 70 to 200 km for 12–72 h forecast length. For all other combinations, it ranges from 75 to 410 km. Particularly, the 24- and 48-h VDEs are 103 and 150 km with YKF combination, which is quite reasonable, while for the other combinations, the 24-h VDEs are in between 135 and 190 km and the 48-h VDEs are in between 200 and 310 km. Table 5 summarizes the landfall position error (km) and time error (hour) of each individual cyclone. Landfall position is also well predicted with YKF experiment, as the errors vary from 30 to 110 km for different forecast lead times. The time errors are reasonably less. In all the cases, only YKF experiment predicts the landfall, while most of the other combinations fail even to predict the landfall for Gonu and Sidr.

Model-simulated tracks in 6-h interval from different parameterization schemes of TCs (a) Sidr, (b) Gonu, (c) Akash, (d) Mala, and (e) 2005 Oct 1–3. And (f) represents the mean vector displacement errors of 5 cyclones in 12-h forecast length
It is also clear that convection schemes strongly affect the cyclone tracks. All the three convection schemes simulate the track more or less in the same direction with both the PBLSs. The mean forecast errors (Fig. 2f) reflect the same. The KF convection scheme returns with the mean track errors of 144 and 180 km in 24- and 48-h forecast, while BM and GD show 175 and 218 km and 162 and 255 km, respectively. This shows the better performance of KF scheme than BM and GD in 24 and 48 h by 18 and 18% and 11 and 29%, respectively. The KF scheme is also more successful in predicting the landfall compared with BM and GD by 47 and 55%, respectively.
4.1.2 Simulation of precipitation
Figures 3 and 4 show model-simulated 24-h accumulated rainfall for TCs Sidr and Gonu at landfall along with TRMM observed rainfall. In TC Sidr, YKF simulates the rainfall closest to observation in terms of spatial distribution though there is some overestimation in terms of rainfall intensity followed by MKF. The rainfall simulated by BM scheme displaces southwards and underestimates the rainfall intensity, while GD totally fails to simulate with both PBL schemes. For TC Gonu also, only YKF (Fig. 4a) simulates the rainfall accurately over Iran coast though there is overestimation over Gulf of Oman. YGD (Fig. 4c) also simulates the rainfall intensity but its spatial distribution displaces eastward. The spatial distribution of rainfall is sensitive to cyclone track. Among all the simulated cyclone tracks, only YKF experiment track is better and hence its rainfall prediction gets improved spatially as compared to other experiments. Similar, results are observed in other TC cases also (not shown).

The 24-h accumulated rainfall (cm) at landfall from different parameterization schemes for cyclone Sidr (a) TRMM, (b) YKF, (c) MKF, (d) YBM, (e) MBM, (f) YGD, and (g) MGD

Same as Fig. 3 but for TC Gonu
Figure 5 gives the mean (of all cyclone cases) ETS and bias of 24-h accumulated rainfall for different thresholds of rainfall in mm to assess the capability of each combination in reproducing the observed rainfall patterns by the model-simulated TCs. Considering the 0.2 ETS as reasonable skill for the prediction of rainfall, YKF experiment predicts the quantitative rainfall well with mean ETS more than 0.2 up to rainfall of nearly 125 mm and 0.1 up to 150 mm. The bias of YKF is slightly higher compared with the others, which means YKF over predicts the rainfall. A possible reason for over prediction of rainfall by YKF scheme may be attributed to the fact that (1) it simulates comparatively strong cyclones and (2) the rainfall estimated from TRMM satellite is always underestimated due to spatial and temporal attenuation (Vrieling et al. 2009). Mohanty et al. (2010) also showed that the TRMM analyses underestimate the rainfall compared with ground-based rain gauges. Next to YKF, MKF combination also shows relatively better performance with ETS varying from 0.15 to 0.07 for all the thresholds. The other four combinations (YBM, MBM, YGD, and MGD) show relatively poor performance with low ETS.

Mean skill scores of 24-h accumulated rainfall at landfall of all cyclone cases (a) ETS and (b) bias at different thresholds of rainfall (mm) for the six experiments
4.1.3 Structure of TC
In this section, east–west cross sections of horizontal wind speed (m s−1, Fig. 6), vertical velocity (cm s−1, Fig. 7), and equivalent potential temperature (θe, deg K, Fig. 8) are analyzed to understand which scheme provides better inner core structure of TCs. These features are studied for all the TCs but presented and discussed here for two most intense TCs viz. Sidr and Gonu. These east–west cross sections are obtained at reference latitudes that pass through the center of storm for individual sensitivity experiment at peak intensity time.

East–west cross section of horizontal wind speed (m s−1) through the center of TC Sidr from different experiments (a) YKF, (b) MKF, (c) YBM, (d) MBM, (e) YGD, and (f) MGD. (g–i) are same as (a–f) but for TC Gonu. (>15 m s−1 is shaded)

Same as Fig. 6 but for vertical velocity (cm s−1) (Negative values are shaded)

Same as Fig. 6 but for equivalent potential temperature (°K) (>350°K is shaded)
Figure 6 gives the east–west cross sections of horizontal wind speed, for cyclone Sidr (a–f) and Gonu (g–l). All the combinations succeed in simulating the region of maximum winds on the eastern side of eye wall. In Sidr (Fig. 6a–f), well-defined eye walls with horizontal wind speeds of 30 m s−1 are seen in YKF and MKF. On November 15/16, 2007, the TC Sidr was under the influence of an upper tropospheric westerly trough lying to the left of the system center and an anti cyclonic circulation to its right. As a result, there was a strong south westerly wind in the upper troposphere (RSMC 2008). This can be clearly demonstrated with YKF experiment (Fig. 6a) having unbroken strong westerlies at 200 hPa level. No other scheme could simulate this structure. Moreover, the eye wall is not well delineated with any other scheme except YKF. In Gonu cyclone, the YKF experiment (Fig. 6g) has strong horizontal wind speed of 25–35 m s−1 extending from the surface to 200 hPa. It is well defined on both sides with the region of maximum wind speed to the right side of eye. MKF (Fig. 6h) also simulates better, while YBM, MBM, YGD, and MGD simulate weaker TCs.
Figure 7 shows the east–west cross section of vertical velocity in cm s−1 and negative values or the downdraft region are shaded. In both Sidr and Gonu TCs (Fig. 7), the YKF (Fig. 7a) simulates intense storms with strong updrafts in mid-levels. The concentration of updrafts prevails toward the eastern segment of the eye wall leading to maximum convection and hence rainfall over the region. Next to YKF, MKF (Fig. 7b) also shows strong updrafts 30–70 cm s−1 at mid-levels. The remaining four experiments display weak updrafts in mid-levels. From Fig. 7, it is also clear that at all vertical levels, the intense updrafts are confined to a very narrow strip in YKF, whereas in the other experiments, weak updrafts spread horizontally on both side of the center. This enhancement of large-scale upward motions in YKF experiment in and around the eye wall of the storms helps the influx of sensible and latent heat from the boundary layer to the storm inner core and helps in storm intensification. The enhanced updrafts and storm intensification rate can be attributed to the feed back mechanism between low-level convergence of warm air, latent heat release in the eye wall, and a correspondent decrease of surface pressure in the inner core of the storm (Asnani 1993).
The characteristic thermo dynamical structure of TC inner core in terms of θe (deg K) is illustrated for cyclones Sidr (a–f) and Gonu (g–l) in Fig. 8. Intense warming (>350 K) within the core is shaded. From the six cross sections of both the cyclone, it is noted that healthy cross sections are obtained primarily with YKF and secondarily with MKF combinations. The YKF (Fig. 8a, g) combination simulates warmer core region and carries vertically constant θe in the inner eye wall region of TC and having higher values of θe (365–370 K) at their surfaces. According to Sikora (1976), abnormally high values of equivalent potential temperature at 700 hPa level can herald a period of subsequent explosive deepening. These features of warm core structures with profound warming in YKF experiment probably attributed with the combined effect of the following: (1) large scale upward surface fluxes of sensible and latent heat from the underlying warm ocean due to the strong updrafts in eye wall region and (2) the substantial reduction in cooler penetrative downdrafts because of the increased warming tendencies in the TC core (Pattnaik and Krishnamurti 2007). The θe gradient between 500 hPa and surface is more around the eye with maximum gradient to the right of the center in YKF, which leads to more convection (Gray 1968). Hence, the better prediction of intensity and track is possible with YKF.
All the above results and discussions clearly demonstrate that the YKF scheme is the best among all the other combinations in predicting the track, intensity, structure, and precipitation. Only the YKF combination predicts the realistic structure with well-defined eye, eye wall, and outer structure of eye.
4.2 Evaluation of the model performance with optimum combination
To evaluate the consistency of the above revealed YKF combination, four TCs during 2008 are predicted on real-time basis, each with different initial conditions. The TC Nargis is simulated with 13, Rashmi with 5, KhaiMuk with 4, and Nisha with 5 initial conditions (Table 4). All the TCs are simulated in 12-h cycle (twice a day). Figure 9 clearly depicts the simulated tracks of all the initial conditions of the TCs (a) Nargis (b) Rashmi (c) KhaiMuk, and (d) Nisha along with the IMD best track. The track of the cyclone Nargis (Fig. 9a) with recurvature could be predicted 7 days in advance (12 UTC of April 25, 2008) and the landfall over Myanmar though with landfall error of 675 km. The tracks of Rashmi, KhaiMuk, and Nisha are also well simulated by the YKF combination about 3 days in advance. The landfall areas of each TCs are consistently simulated with all the initial conditions. From Fig. 9e, the mean forecast errors are 155, 129, and 172 km for the forecast of 24, 48, and 72 h. The large 24-h track error may be due to the large initial vortex position error of around 70 km. Further, analysis indicated that the large 24-h forecast error is mainly due to the similar error in case of TC KhaiMuk (295 km). It indicates that the YKF combination could not simulate well the weak TCs. The landfall errors are 104, 74, and 72 km for 72-, 48-, and 24-h forecast lead time (Table 6). The time errors are reasonably good, showing most of the times ±6–9 h except in KhaiMuk case. It is encouraging to note that all the 13 simulations (00 UTC of April 26, 2008—00 UTC of May 2, 2008) consistently indicate the intensification of Nargis to a very severe cyclonic storm stage. The higher landfall errors of 2008 cyclones may be mainly attributed to large initial vortex position errors. While the average initial vortex position error is about 80 km in case of customization simulations, it is about 110 km in case of real-time cases of 2008. Further, all systems are severe in the sensitivity study, while during 2008 except Nargis, all are weak cyclones. The cyclones Rashmi and Nisha are weak cyclones, and KhaiMuk crossed coast as a deep depression. The WRF model is more successful in simulating strong cyclones than weak cyclones and depressions (Ryerson et al. 2007). Figure 10a provides the 72- and 48-h intensity forecast in terms of CSLP (hPa) and 10-m wind (m s−1). The peak intensity of the TC Rashmi (Fig. 10b) is also well predicted by the model 3 days in advance. In the case of KhaiMuk, the model with optimum combinations of physical parameterization schemes predicted the weakening of the TC over the sea itself before the landfall very realistically (not shown). The intensity evolution of Nisha also predicted well (not shown).

Real-time-simulated tracks of TCs (a) Nargis, (b) Rashmi, (c) KhaiMuk, and (d) Nisha during 2008. e The mean vector displacement errors (km) of all 27 experiments in 12-h interval up to 72-h forecast

Intensity prediction in 72-h (triangular symbols) and 48-h (circles) forecast in terms of CSLP (dark symbols) and 10-m wind (hole symbols) for the TCs (a) Nargis and (b) Rashmi
4.3 Track comparison with other operational center’s tracks
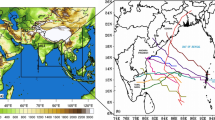
In this section, WRF-simulated TC tracks on real-time basis are compared with other operational tracks provided by IMD (Quasi Legragian Model, QLM), NCMRWF (T254L64 global model), NCEP (Global Forecasting System, GFS), ECMWF (European Centre for Medium range Weather Forecast), and UKMO (U. K Metorological Office). For this purpose, 2008 (four) TCs viz., Nargis, Rashmi, KhaiMuk, and Nisha are considered. The above mentioned operational centers tracks are taken from RSMC (2009). The 72-, 48-, and 24-h track forecasts are compared with (a) Nargis, (b) Rashmi, (c) KhaiMuk, and (d) Nisha and provided in Fig. 11.

Comparison of WRF model simulated tracks to that of the leading operational agencies for the TCs (a) Nargis, (b) Rashmi, (c) KhaiMuk, and (d) Nisha. First, second, and third columns represent the track forecast in 72, 48, and 24 h ahead of landfall
In case of Nargis, the IMD, NCMRWF, and UKMO models show large deviations in track prediction. GFS track is better for 24-h forecast in this case. ECMWF and WRF models forecast the movement of TC reasonably well in advance of 72–24 h. It is very clear that in 72 h advance, only WRF and NCMRWF T254 models predict the landfall. However, WRF model could simulate better movement as well as landfall for all the time leads. The movement of TC Rashmi is reasonably well predicted by all the models (centers) from 72- to 24-h forecast with some errors in its speed. No model could predict the track of TC KhaiMuk consistently. The TC Nisha has a special character that it formed over the land and travels in northwest and northward direction skirting the coast. All the models predicted the genesis of the system over the land; however, 72-h track forecast is better with WRF model. In 48-h forecast, UKMO and ECMWF show better track and landfall prediction. In 24 h advance, only UKMO and WRF model could predict the movement of TC Nisha, while GFS, NCMRWF, and ECMWF show unrealistic movement.
Based on the above 12 cases, the mean vector displacement errors (VDEs) of the tracks are computed and presented in Fig. 12. The initial position error is less in ECMWF (101 km) and WRF model (110 km) compared with others except IMD QLM. In QLM model, the position error is zero because QLM makes use of vortex relocation and initialization process in which TC center is adjusted to observed center. The UKMO and ECMWF track forecast is better for 24 h but the 48- and 72- h forecast has relatively large errors. The real-time performance of WRF model in 24-, 48-, and 72-h track forecast is reasonably good with marginal errors. The 24-h VDEs of WRF model (116 km) are competing with that of the GFS (113 km), ECMWF (94 km), and UKMO (95 km). However, in 48-h track forecast, WRF model is superior, while for 72-h forecast, WRF model (166 km) is next to GFS (161 km). The NCMRWF T254 and IMD QLM have relatively large errors in 24- to 72-h track forecasts.

Mean vector displacement errors (km) of the WRF model track forecast along with the operational centers errors
5 Conclusions
The broad conclusions emerged in this study are presented in the following:
From this study, it is also clear that the YSU PBL scheme shows less intensity error with three of the convection schemes. The Mean RMSE of intensity in terms of CSLP (10-m wind) with YSU PBL scheme is 18 hPa (14 m s−1) while that of MYJ scheme is 20 hPa (16 m s−1). Further, the YSU PBL scheme with KF convection scheme simulates the intensity with minimum errors of 13 hPa and 11 m s−1 than any other combinations.
The KF convection scheme returns with the mean track errors of 144 and 180 km in 24- and 48-h forecast, while BM and GD show 175 and 218 km and 162 and 255 km, respectively. This shows the better performance of KF scheme than BM and GD in 24- and 48-h by 18 and 18% and 11 and 29%), respectively. The KF scheme is also more successful in predicting the landfall compared with BM and GD by 47 and 55%, respectively. Further, the KF and YSU combination shows least track and landfall errors. The mean vector displacement errors of YKF combination ranges from 70 to 200 km from 12- to 72-h forecast length. The landfall errors are spreaded from 30 to 110 km for different forecast lead times. With the better prediction of track and intensity, the YKF experiment could replicate much of the observed characteristics features of 24-h accumulated rainfall with some overestimation. These are reflected in ETS and bias, which show the mean ETS of YKF is more than 0.2 up to rainfall of nearly 125 mm.
From the study of vertical structural characteristics of the cyclone inner core, it is clear that robust features are observed with YKF combination produced intense horizontal wind speed, strong convergence with intense updrafts within the warmer cyclone core. The enhanced updrafts and storm intensification rate in YKF experiment can be attributed to the feed back mechanism between low-level convergence of warm air, latent heat release in the eye wall, and a correspondent decrease of surface pressure in the inner core of the storm.
This combination is well tested with four 2008 TCs on real-time bases and compared the predicted tracks with those of leading operational centers. The mean track errors (based on 27 cases) of 24-, 48-, and 72-h forecast are 155, 129, and 172 km, respectively. The landfall errors are 104, 74, and 72 km, which are reasonably good with the lead time of 72, 48, and 24 h, respectively. The 24- and 48-h track errors are still large. It may be due to the large vortex position error of about 70 km at initial time. According to Holland (1984), the track forecast can be improved by reducing the initial vortex position error. This can be achieved through 3-dimensional variational data assimilation technique by incorporating high-density observations into model initial condition, particularly in the deep oceanic region where TCs form and develop (Osuri et al. 2010). Comparing the real-time performance of WRF model in track prediction with other operational forecasting centers, it is encouraging to note that WRF model is competitive in 24 and 72 h and superior in 48-h forecast. The 24-h VDEs of WRF model (116 km) is competing with that of the GFS (113 km), ECMWF (94 km) and UKMO (95 km). However, in 48-h track forecast, WRF model is superior, while for 72-h forecast, WRF model (166 km) is next to GFS (161 km).
References
Anthes RA (1977) Hurricane model experiments with a new cumulus parameterization scheme. Mon Weather Rev 105:287–300
Anthes RA (1982) Tropical cyclones—their evolution, structure, and effects. Monograph No. 41, American Meteorological Society
Arakawa A, Schubert WH (1974) Interaction of a cumulus cloud ensemble with the large-scale environment. Part I. J Atmos Sci 31:674–701
Asnani GC (1993) Tropical meteorology, vols. 1 and 2, published by Prof. G.C. Asnani, c/o Indian Institute of Tropical Meteorology, Dr. Homi Bhabha Road, Pashan, Pune- 411008, India
Betts AK, Miller MJ (1986) A new convective adjustment scheme. Part II: single column tests using GATE wave, BOMEX, ATEX, and Arctic air-mass data sets. Quart J R Meteor Soc 112:693–709
Bhaskar Rao DV, Hari Prasad D (2007) Sensitivity of tropical cyclone intensification to boundary layer and convective processes. Nat Hazards 41:429–445
Braun SA, Tao W-K (2000) Sensitivity of high-resolution simulations of hurricane Bob (1991) to planetary boundary layer parameterizations. Mon Weather Rev 128:3941–3961
Carlson TN, Boland FE (1978) Analysis of urban-rural canopy using a surface heat flux/temperature model. J Appl Meteor 17:998–1013
Charnock H (1955) Wind stress on a water surface. Quart J R Meteor Soc 81:639–640
Dudhia J (2004) The weather research and forecasting model (Version 2.0). 2nd Int’l Workshop on Next Generation NWP Model. Seoul, Korea, Yonsei Univ., 19–23
Gray WM (1968) Global view of the origin of tropical disturbances and storms. Mon Weather Rev 96:669–700
Grell GA (1993) Prognostic evaluation of assumptions used by cumulus parameterizations. Mon Weather Rev 121:764–787
Grell GA, Devenyi D (2002) A generalized approach to parameterizing convection combining ensemble and data assimilation techniques. Geophys Res Lett., 29(14):Article 1693
Holland GJ (1984) Tropical cyclone motion: a comparison of theory and observations. J Atmos Sci 41:68–75
Hong S-Y, Pan H-L (1996) Nocturnal boundary layer vertical diffusion in a medium-range forecast model. Mon Weather Rev 124:2322–2339
Hong S-Y, Dudhia J, Chen S-H (2004) A revised approach to ice microphysical processes for the bulk parameterization of clouds and precipitation. Mon Weather Rev 132:103–120
Hong SY, Noh Y, Dudhia J (2006) A new vertical diffusion package with an explicit treatment of entrainment processes. Mon Weather Rev 134:2318–2341
IMD Atlas (2008) Tracks of storms and depressions in the Bay of Bengal and the Arabian Sea, India Meteorological Department, New Delhi, India
Janjic ZI (1994) The step–mountain eta coordinate model: further developments of the convection, viscous sublayer and turbulence closure schemes. Mon Weather Rev 122:927–945
Janjic ZI (2003) A nonhydrostatic model based on a new approach. Meteorol Atmos Phys 82:271–285
Kain JS (2004) The Kain-Fritsch convective parameterization: an update. J Appl Meteor 43:170–181
Kain JS, Fritsch JM (1993) Convective parameterization for mesoscale models: The Kain–Fritsch scheme. The representation of cumulus convection in numerical models, Meteorological Monograph, No. 46, American Meteorological Society, pp 165–170
Kuo H-L (1974) Further studies of the parameterization of the influence of cumulus convection on large-scale flow. J Atmos Sci 31:1232–1240
Kuo Y-H, Reed RJ, Liu Y-B (1996) The ERICA IOP 5 storm. Part III: Mesoscale cyclogenesis and precipitation parameterization. Mon Weather Rev 124:1409–1434
Mandal M, Mohanty UC, Raman S (2004) A study on the impact of parameterization of physical processes on prediction of tropical cyclones over the Bay of Bengal With NCAR/PSU mesoscale model. Nat Hazards 31:391–414
Mellor GL, Yamada T (1982) Development of a turbulence closure model for geophysical fluid problems. Rev Geophys Space Phys 20:851–875
Mohanty UC, Osuri KK, Routray A, Mohapatra M, Pattanayak Sujata (2010) Simulation of Bay of Bengal tropical cyclones with WRF model: impact of initial and boundary conditions. Mar Geodesy 33(4):294–314
Osuri KK, Mohanty UC, Routray A, Mohapatra M (2010) Impact of satellite derived wind data assimilation on track, intensity and structure of tropical cyclones over North Indian Ocean. Int J Remote Sens (accepted)
Pattnaik S, Krishnamurti TN (2007) Impact of cloud microphysical processes on hurricane intensity, part 1: control run. Meteorol Atmos Phys 97:117–126
Rao GV, Bhaskar Rao DV (2003) A review of some observed mesoscale characteristics of tropical cyclones and some preliminary numerical simulations of their kinematic features. Proc Ind Nat Sci Acad A 69:523–541
RSMC-Tropical cyclones (2008) A report on cyclonic disturbances over North Indian Ocena during 2008. India Meteorological Department, New Delhi
Ryerson WR, Rugg S, Elsberry RL, Wegiel J (2007) Evaluations of the AFWA weather research forecast model Western North Pacific tropical cyclone predictions, 27th conference on hurricanes and tropical meteorology, CA, 24–28 April 2006, (Paper 7A.5). Available at http://ams.confex.com/ams/pdfpapers/108856.pdf
Schaefer JT (1990) The critical success index as an indicator of warning skill. Weather Forecast 5:570–575
Sikora CR (1976) An investigation of equivalent potential temperature as a measure of tropical cyclone intensity. Technical note, JTWC, 76-3, 12 pp
Skamarock WC, Klemp JB, Dudhia J, Gill DO, Barker DM, Wang W, Powers JG (2005) A description of the advanced research WRF version 2, NCAR TECHNICAL NOTE
Vrieling A, Sterk G, de Jong SM (2009) Mapping rainfall erosivity for Africa with TRMM time series. Geophys Res Abstr 11:2034
World Meteorological Organization technical document (2008) Tropical cyclone operational plan for the Bay of Bengal and the Arabian Sea. Document No. WMO/TDNo. 84, 1
Yang MJ, Cheng L (2005) A modeling study of typhoon Toraji (2001): physical parameterization sensitivity and topographic effect. Terr Atmos Ocean Sci 16:177–213
Acknowledgments
The Indian National Center for Ocean Information Services (INCOIS) is gratefully acknowledged for providing financial support to carry out this research. The authors also owe thanks to IMD for providing best track parameters of TCs used for the validation of model-simulated results. The authors gratefully acknowledge the NCEP/NCAR for their analyses data sets used in the study. We also thank anonymous reviewers for their valuable comments to improve the quality of manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Osuri, K.K., Mohanty, U.C., Routray, A. et al. Customization of WRF-ARW model with physical parameterization schemes for the simulation of tropical cyclones over North Indian Ocean. Nat Hazards 63, 1337–1359 (2012). https://doi.org/10.1007/s11069-011-9862-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11069-011-9862-0