
Abstract
Recently, Siamese network (Siam)-based visual tracking describes the tracking problems as the cross-correlation between convolutional features of the target template and searching regions and solves them by similarity learning, which has achieved great success in performance. However, most of the existing Siam-based tracking methods neglect to explore the feature correlations, which is very important to learn more representative features. Moreover, the first frame is used as the fixed template without updating the template, which leads to a reduction in accuracy. To address these issues, in this paper, we propose an Adaptive Updating Siamese Network (AU-Siam) for more powerful feature correlations and adaptive template updating. Specifically, a siamese feature extraction subnetwork is proposed to introduce the attention mechanism for more discriminative representations. Furthermore, an object template updating subnetwork is developed to dynamically learn object appearance changes for robust tracking. It’s interesting to show that the proposed AU-Siam can effectively reduce the probability of tracking drift in the case of fast motions and heavy occlusion and improve the tracking accuracy. Experimental results on public tracking benchmarks with challenging sequences demonstrate that our AU-Siam performs favorably against other state-of-the-art methods.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
As one of the most important research hotspots in the computer vision[52], object tracking[50] has been widely applied in fields like visual surveillance[33, 38,39,40] and so on. Although much progress[49, 55] has been made in recent years, it is still challenging to design a robust tracking algorithm due to factors such as geometric deformations, partial occlusions, fast motion and background clutters, etc.
A typical tracking algorithm consists of three components. The first is an object appearance model, which evaluates the likelihood that a candidate belongs to the tracked object. The second component is a motion model, which describes the dynamics of the object over time. The third component is the search strategy that decides where to look for the most likely position of the next object state. The tracking algorithm in the literature is optimized from one, two or all aspects of the three parts to improve the performance of the tracking algorithm. However, the appearance model contains a large number of clues to distinguish the tracking target from other video content, which is an important aspect of the tracking algorithm and largely determines the overall performance of the tracking algorithm. The tracking algorithm based on an appearance model can be divided into two groups, one based on the classical online updating network, the other based on the matching tracking approach. The former takes advantage of deep feature which can update the classifier online or target appearance model with superior tracking performances. However, the majority of the algorithms prove to be slow. Whereas the tracking method based on matching utilizes a target template to match candidate samples, requiring no online updating, which is fast but not highly accurate[29]. Among the matching-based tracking methods, the siam-based tracking has aroused wide attention from many researchers for it can balance the tracking accuracy and speed.
Siam-based tracking regards the first frame of the tracking video sequences as the template frame of the tracking object. It’s usually easy to distinguish the first frame, more often than not, artificially marked or calculated by the target detection algorithm. However, the target in the video is dynamic and cannot be represented in real-time by using only the first frame as a fixed template. When the target varies greatly, the target of the current frame may share little similarity with that of the first frame, leading to tracking mistakes. Therefore, the previous frame or the continual previous frames of the current one may be taken as the target template to acquire dynamic status. Even in this way, the real-time updating template may still result in template shifting and tracking loss. Figure 1 illustrates the comparison of different frames as template methods in visual tracking.

Comparison of different frames as template methods in visual tracking. We use video Kitesurf and Skating1 as examples. From the figure, we can find that in some cases, the first frame and the previous frame as the template would lose target. With the proposed AU-Siam, our method can get more effective feature representations and achieve more accurate tracking
In this paper, we propose an Adaptive Updating Siamese Network (AU-Siam) for both channel and spatial correlations learning and adaptive template updating learning. Specifically, we propose a siamese feature extraction subnetwork for more powerful feature representations inspired by CBAM[46]. The subnetwork can be utilized to selectively emphasize features and suppress less useful ones, thus performing feature selection and improving the quality of representations. Moreover, an object template updating subnetwork is developed to update the template by fusing the first frame and the previous frame, thus enhancing the robustness to trackers with fast motions and heavy occlusions. Therefore, our method obtains better robustness and accuracy compared with other state-of-the-art tracking methods.
The main contributions of this work are summarized as follows:
-
(1)
A well-designed feature extraction subnetwork is presented to explore how to drive the network to learn more effective appearance features by explicitly modeling the channel and spatial correlations. With more accurate and comprehensive appearance features, our method can enhance the robustness when the dataset is corrupted by strong noise.
-
(2)
With the template updating subnetwork, adaptive template updating mechanism can be introduced to update the tracking models by fusing the information of the first frame and the previous frame, which helps to learn more powerful appearance features when dealing with complicated cases, especially for target with extremely fast motions and heavy occlusions.
-
(3)
A novel algorithm called AU-Siam is developed to seamlessly integrate the feature extraction subnetwork and template updating subnetwork into an Adaptive Updating Siamese Network (AU-Siam) to handle tracking problems in-the-wild. With more robust and effective appearance features, our algorithm outperforms state-of-the-art methods on challenging benchmark datasets such as OTB2013, OTB50, OTB100, VOT2016 and VOT2018.
The rest of this paper is organized as follows: Section 2 reviews previous research in this field. Section 3 introduces the proposed adaptive updating siamese network approach. We present the experiment results and make a comparative analysis between our method and other state-of-the-art tracking methods in Section 4. A summary of this paper is presented in Section 5.
2 Related work
This section is about a brief review of tracking methods that are most related to our work.
Correlation filtering based tracking
The correlation filtering trained by the exemplar image to conduct a filtering process on the image, then figuring out the position of the maximum value in the response image, namely, the corresponding target position in the image. D. S. Bolme et.al [51]proposed the correlation filtering based on the least square error for the first time. In 2015, P.Martins[21] proposed a high-speed tracker with kernelized correlation filters (KCF) and multi-channel features. Afterwards, an increasing number of improved algorithms about correlation filtering have occurred [2, 5, 31, 32, 36]. In recent years, tracking algorithm based on deep learning has achieved remarkable performances in target tracking field. The current prevailing deep learning based tracking includes deep correlation based tracking and some other types[11,12,13, 22]. The deep correlation filtering based tracking[6,7,8] uses deep network to extract features, others adopt a siamese network structure together with feature extraction and classifier.
Siamese network based tracking
Siamese Network It treats the tracking problem as a similarity learning problem that operates on target branches and searches branches to obtain response images and judge the status of the target according to the maximum value position on the response image. SINT[41] transformed the target tracking problem as a patched matching problem for the first time and realized it through a neural network. SiamFC[1], improved SINT, was the first to solve the tracking problem with a fully convolutional Siamese network structure. Then CFNet[42] integrated correlation filtering(CF) as a network layer and embedded it into a siamese network. StructSiam[54] took into account local structures during tracking, whereas SiamFC-tri[9] introduced Triplet Loss in the siamese tracking network. The dynamic siamese network(DSiam)[19] added the target appearance transformation layer and background suppression hierarchical layer to improve the discrimination ability of the siam-based network. More to be mentioned, Twofold Siamese network(SA-Siam)[20] learned respectively different features and added attention mechanisms and integration of multi-layer features in the Z branch. At the same time, SiamRPN[29] extracted candidate region from correlation feature and encoded target appearance information on the template branch into RPN[37] features, which can effectively discriminate the foreground and background of images and have improved the tracking performances. Based on that, many scholars have proposed improved algorithms [28, 30, 53, 56]. In recent years, siamese networks have been widely used not only in target tracking, but also in other fields [14,15,16,17,18].
Attention mechanism
The Attention Mechanism can help the model give different weights to each part of the input X, extracting more critical and important information, and making the model more accurate judgments without adding more overhead to the calculation and storage of the model. The attention mechanism in deep learning is based on this concept of directing your focus, and it pays greater attention to certain factors when processing the data. In recent years, attention mechanism has been widely applied in various fields such as image classification, object segmentation and so on [24, 34, 35, 43, 44]. ACFN[4] proposed an attention mechanism correlation filtering network and used the attention networks to choose the optimal module from various feature extractors to track targets. CSR-DCF[36] took advantage of colorful histograms to restrict correlation filtering learning and establish a foreground spatial reliability map. RASNet[45] introduced three attention mechanisms to improve the discriminating ability of the model: residual attention mechanism, channel attention mechanism and residual attention mechanism. The interdependence between explicit model-establishing feature channels of SENet[23] proved the effectiveness of channel attention in the image recognition tasks. CBAM[46] combines the attention mechanism modules of spatial and channel to achieve better results than the attention mechanism of SENet focusing only on channels. The proposed method, on the one hand, is optimized from the aspect of feature extraction, using channels and spatial attention mechanism based on SiamRPN to improve feature discrimination; on the other hand, from the aspect of template update, adaptively update the tracking model to improve tracking performance and reduce the probability of template drift.
3 Adaptive updating siamese network
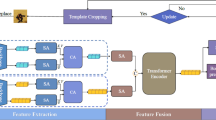
In this section, we give a detailed description of our tracking algorithm. We first elaborate on the proposed siamese feature extraction subnetwork in Section 3.1, and then present the object template updating subnetwork in Section 3.2. Section 3.3 illustrates the proposed Adaptive Updating Siamese Network (AU-Siam). Finally, Section 3.4 shows how to train the proposed tracker. Figure 2 depicts the overall architecture of our proposed AU-Siam.

The overall architecture of our proposed AU-Siam. The siamese feature extraction subnetwork can implicitly enhance feature representations and context information for more effective feature representations. The object template updating subnetwork can generate more accurate and robust response maps by incorporating the first frame with the previous frame of the current frame as the template frames. Then, by integrating the two subnetworks into an Adaptive Updating Siamese Network via a seamless formulation, our AU-Siam can outperform state-of-the-art methods. In classification branch, the output feature map has 2k channels corresponding to foreground and background of k anchors. In regression branch, the output feature map has 4k channels which corresponding to four coordinates used for proposal refinement of k anchors
3.1 Siamese feature extraction subnetwork
The SiameseRPN method improves the classical SiamFC method by introducing a region proposal network, which allows the tracker to estimate the bounding box of variable aspect ratio effectively. In this work, we choose SiameseRPN as our backbone due to its robustness and efficiency. In terms of feature extraction, attention mechanism is added to extract more accurate feature information through channel attention and spatial attention, as shown Fig. 3. The semantic features have strong robustness to the appearance change of the target. The channel and spatial attention module can be thought of as the process of selecting semantic properties for different contexts. Therefore, channel and spatial attention mechanism are introduced to extract target features, so that the network can selectively amplify valuable feature and suppress useless feature from the perspective of global information, so as to improve the robustness of the model.

The network architecture of our siamese feature extraction subnetwork. By introducing the channel and spatial attention, our proposed method can be used to capture hierarchical patterns and attain context information for robust tracking
Inspired by [46], the feature Fz firstly extracted from the template frames is used to do attention extraction on channel dimension, and then attention extraction on spatial dimension.
⊗ denotes element-wise multiplication, \(F^{\prime }_{z}\) is the output after channel attention module and \(F^{\prime \prime }_{z}\) is the final refined output after the two attention modules.
Channel attention
We first aggregate spatial information of the feature Fz extracted from the template frame by using both average-pooling and max-pooling, generating two different spatial context descriptors: the average-pooled features \(F_{avg}^{c}\) and max-pooled features \(F_{max}^{c}\). Both descriptors are then forwarded to a shared network to produce our channel attention map Mc. The shared network is composed of multi-layer perceptron (MLP) with one hidden layer.
σ denotes the sigmoid function, W0 and W1 are the MLP weights, shared for both inputs and the ReLU activation function is followed by W0.
Spatial attention
We aggregate channel information of a feature map by using two pooling operations, generating two maps: \(F_{avg}^{s}\) and \(F_{max}^{s}\). Each denotes average-pooled features and max-pooled features across the channel.
σ denotes the sigmoid function, f7×7 represents a convolution operation with the filter size of 7 × 7. Finally, after the attention module, the formula of response map obtained by the convolution of template frame and detection frame can be expressed as follows:
\( \varphi {}^{\prime \prime }(z)\) represents the feature of template frame after channel attention and spatial attention modules.
3.2 Object template updating subnetwork
During target tracking, the appearance information of the template frame is the key to the tracking results. The first frame of the tracking video sequence contains a lot of highly reliable target appearance information. However, only the first frame is used as the fixed template frame without updating the target template. When the target appearance changes greatly, it is easy to lose the target. The previous frame is very related to the current state of the target and contains more useful information about the change of the target appearance. However, if only the previous frame is used as a template frame, the tracking shift will occur in all subsequent frames when the previous frame is tracking drift. Therefore, this paper proposes an object template update subnetwork, which extracts the appearance information of the template by combining the first frame and the previous frame as the target template, to adapt to the specific update requirements of the current frame, improve the reliability of the target template, and improve the robustness of tracking.
When the first frame z1 as the target template, the corresponding response map of it and the detection frame x is as follows:
\({\varphi {}^{\prime \prime }\left ({z_{1} } \right )}\) refers to the feature acquired via template frame z1 passing through attention module. ∗ denotes the convolution operation.
When the previous frame zt− 1 as the target template, the corresponding response map of it and the detection frame x is as follows:
\({\varphi {}^{\prime \prime }\left ({z_{t - 1} } \right )}\) represents the feature obtained by template frame zt− 1 going through attention module.
When combine the first frame z1 and the previous frame zt− 1 as the target template, the corresponding response map of it and the detection frame x is as follows:
where η is the weighted parameter of the two templates.
In the case that the frame before the current frame loses the target, we only use the first frame as the matching template. We use a condition to determine if the target was lost in the previous frame before each frame is calculated. As shown in Fig. 4, we use St to represent the target position of frame t when the first frame as the template, and use \(S^{\prime }_{t}\) to represent the target position of frame t when the previous frame as the template. Cerror is the Euclidean distance of St and \(S^{\prime }_{t}\). If Cerror is greater than threshold 𝜃, it means that the previous frame of the current frame has been lost target, then we use the first frame as the template. If the error is less than threshold 𝜃, it means that the previous frame of the current frame has been not lost target, then we use the first frame and the previous frame as the template.
𝜃 is the threshold, which determines whether the target was lost in the previous frame.

The illustration of error calculation in the Object template updating subnetwork. The Cerror is used to determine if the target was lost in the previous frame
3.3 Adaptive updating siamese network
The region proposal network consists of two parts: a classification branch to distinguish between target and background, and a regression branch to fine-tune candidate areas. As shown in Fig. 2, our adaptive updating siamese network integrates the siamese feature extraction subnetwork and the object template updating subnetwork.
The siamese feature extraction subnetwork outputs the channel and spatial attention feature of the template frame(the first frame \(\varphi (z^{\prime \prime }_{1})\) and the previous frame \(\varphi (z^{\prime \prime }_{t-1})\)) and the feature φ(x) of the search frame. The three features are divided into classification branch feature and regression branch feature. The feature \( \varphi \left (z^{\prime \prime }_{1}\right )\) of z1 template frame split into two branches \(\left [ {\varphi (z^{\prime \prime }_{1} )} \right ]_{cls} \) and \(\left [ {\varphi (z^{\prime \prime }_{1} )} \right ]_{reg} \) which have 2k and 4k times in channel respectively by two convolution layers. Same as z1 template frame, the feature \( \varphi \left (z^{\prime \prime }_{t - 1}\right )\) of zt− 1 template frame split into two branches \(\left [ {\varphi (z^{\prime \prime }_{t - 1} )} \right ]_{cls} \) and \(\left [ {\varphi (z^{\prime \prime }_{t - 1} )} \right ]_{reg} \). The feature \( \varphi \left (x \right )\) of search frame x is also split into two branches \(\left [ {\varphi (x )} \right ]_{cls} \) and \(\left [ {\varphi (x )} \right ]_{reg} \) by two convolution layers but keeping the channels unchanged.
Then the two branch features generate the response maps of the classification branch and regression branch after the object template updating subnetwork.
\(A_{cls}^{w \times h \times 2k}\) contains a 2k channel vector, which represents for negative and positive activation of each anchor at corresponding location on original map. \(A_{reg}^{w \times h \times 4k} \) contains a 4k channel vector, which represents for dx, dy, dw, dh measuring the distance between anchor and corresponding groundtruth.
Finally, the predicted proposal with the highest classification score is selected as the output tracking region. The process of selecting the output tracking region from the response map is similar to SiamRPN. We collect the top K points in all \(A_{cls}^{w \times h \times 2k}\) where l is odd number and denote the point set as \(CLS^ * = \left \{ {\left ({x_{i}^{cls} ,y_{j}^{cls} ,c_{l}^{cls} } \right )i \in I,j \in J,l \in L} \right \}\) where I, J, L are some index set. Variables i and j encode the location of corresponding anchor respectively, and l encode the ratio of corresponding anchor, the corresponding anchor set as \(ANC^ * = \left \{ {\left ({x_{i}^{an} ,y_{j}^{an} ,w_{l}^{an} ,h_{l}^{an} } \right )i \in I,j \in J,l \in L} \right \}\). The activation of ANC∗ on \(A_{reg}^{w \times h \times 2k} \) to get the corresponding refinement coordinates as \(REG^ * = \left \{ {\left ({x_{i}^{reg} ,y_{j}^{reg} ,dx_{l}^{reg} ,dy_{l}^{reg} ,dw_{l}^{reg} ,dh_{l}^{reg} } \right )i \in I,j \in J,l \in L} \right \}\). Afterwards, the refined top K proposals set \(PRO^ * = \left \{ {\left ({x_{i}^{pro} ,y_{j}^{pro} ,w_{l}^{pro} ,h_{l}^{pro} } \right )} \right \}\) can be obtained by following (13) :
3.4 Training
This paper trains the model with an offline training method, cropping the optimal model by minimizing a loss function. The whole network loss function is made up of classification loss and regression loss, employing backpropagation through time(BPTT) and stochastic gradient descent algorithm(SGD) to propagate in gradient and update parameters, which can be illustrated as:
where Lcls elaborates classification loss, λLreg illustrates regression loss, λ is hyper-parameter to balance the two parts.
The elaborates classification loss Lcls is shown as follows:
Let Ax, Ay, Aw, Ah denote center point and shape of the anchor boxes and let Tx, Ty, Tw, Th denote those of the ground truth boxes, the normalized distance is:
And the regression loss employs smooth L1 loss is:
3.5 Algorithm Implementation
Algorithm 1 shows the proposed tracking method for our work.

4 Experiment results and analysis
We conduct extensive experiments to analyze and evaluate the proposed tracking method. In the following, we first introduce some experimental settings. Then we evaluate our model on five of the largest benchmarks, OTB2013[47, 48], OTB50[47, 48], OTB100[47, 48], VOT2016[25] and VOT2018[26].
4.1 Implementation Details
The proposed AU-Siam is trained with Pytorch on GeForce GTX 1080 Ti GPU.
Same with SiamRPN, but adds the previous frame as the template frame for template matching. Use AlexNet[27] and CBAM[46] as the base network. The parameters of the network are initialized with the ImageNet pre-trained models.
To increase the generalization capability and discriminative power of our feature representation, and avoid over-fitting to the scarce tracking data, our tracker is pre-trained offline from scratch on the video object detection dataset of the ImageNet Large Scale Visual Recognition Challenge (ILSVRC15). This dataset includes more than 4000 sequences with about 1.3 million labeled frames. It is widely utilized in tracking methods recently as it depicts scenes and objects distinct to those in the traditional tracking benchmarks.
We apply stochastic gradient descent (SGD) with the momentum of 0.9 to train the network from scratch and set the weight decay to 0.0005. The learning rate exponentially decays from 10− 2 to 10− 5. The model is trained for 50 epochs with a mini-batch size of 32. 𝜃 is 6, λ= 1 is same as the SiamRPN, the weights of W0 and W1 in (3) are trained by offline training, and when the weighting parameter η in (8) is 0.9, the result is the best.
4.2 Evaluation metrics
We evaluate our approach on two popular challenging datasets, online tracking benchmark (OTB2013[47, 48], OTB50[47, 48], OTB100[47, 48]) and visual object tracking benchmark (VOT2016[25], VOT2018[26]).
OTB
The object tracking benchmarks (OTB) consist of three datasets, namely OTB-2013, OTB-50 and OTB-100. They have 51, 50 and 100 real-world targets for tracking, respectively. All sequences have eleven interference properties.
The two standard evaluation metrics on OTB are success rate and precision. For each frame, we compute the IoU (intersection over union) between the tracked and ground-truth bounding boxes, as well as the distance of their central locations. A success plot can be obtained by evaluating the success rate at different IoU thresholds. Conventionally, the area-under-curve (AUC) of the success plot is reported. The precision plot can be acquired similarly, but usually, the representative precision at the threshold of 20 pixels is reported. We use the standard OTB toolkit to obtain all the numbers.
VOT
The VOT2016 dataset contains 60 video sequences showing various objects in challenging scenarios. The VOT2018 dataset consists of 60 challenging video sequences, which is annotated with the same standard as VOT2016. According to the evaluation criterion, a tracker is re-initialized with the ground truth location whenever tracking fails (the overlap between the estimated location and ground truth location equals zero).
The metrics used for the evaluation of the VOT dataset include accuracy(A), robustness(R) and expected average overlap (EAO). Accuracy is defined as the overlap ratio of the estimated location and ground truth while robustness is defined as the number of tracking failures. EAO is a function of sequence length, computed by the average accuracy for a certain number of frames after tracker initialization. A good tracker has high A and EAO scores but low R scores. More details about the evaluation protocol can be found in [25, 26].
4.3 Comparison with the State of the Arts
Five benchmarks including OTB-2013, OTB-50, OTB-100, VOT2016 and VOT2018 are adopted to demonstrate the performance of our tracker against some state-of-the-art. Traditionally, tracking speeds in excess of 25(FPS) is considered real-time. Our tracker runs at 77(FPS). All results in this section are obtained by using the OTB toolkit[47, 48], and VOT toolkit[25, 26].
4.3.1 Experiments on OTB-2013, OTB-50 and OTB-100
We evaluate the proposed algorithms with comparisons to numerous state-of-the-art trackers including SiamRPN[29], DeepSRDCF[7], SRDCF[5], SiamFC[54], CFNet[9], ACFN[4], CSR-DCF[36], Staple[2] and DSiamM[19]. Note that SiamRPN, CFNet, SiamFC, and DSiamM are latest siam-based trackers, and CSR-DCF and ACFN employ attention mechanisms, and DSiamM uses a template update policy, and SimRPN and DeepSRDCF are recent fast deep trackers. All the trackers are initialized with the ground-truth object state in the first frame. Figure 5 shows the overall performance of our method and other state-of-the-art tracking algorithms in terms of the success and precision plots for OPE on OTB-2013, OTB-50, and OTB-100. Figure 6 shows the accuracy and success rate of attributes such as fast motion (FM), occlusion (OCC) and scale variation(SV) on OTB-100. Table 1 summarizes more results, including the running speed in frames per second (FPS). The comparison shows that our algorithm has the best real-time tracking performance on all three OTB benchmarks.

Precision plots and success plots (AUC) over overall of 9 tracking algorithms on OTB2013,OTB50 and OTB100 datasets

Precision plots and success plots(AUC) over FM, OCC and SV attributes of 9 tracking algorithms on OTB100 dataset
On the results of OTB-2013
, our proposed algorithm performs the best against the other trackers with AUC and precision score of 66.8% and 90.3%. In the trackers using the Siamese network, our performance is better than that of SiamRPN, CFNet, and SiamFC, with relative improvements of 1%,5.7% and 6.1% in AUC, and improvements of 1.9%, 9.6% and 9.4% in precision score, respectively. Moreover, We perform better than CSR-DCF and ACFN, which adopt an attention mechanism, with relative improvements of 7.5% and 6.1% in AUC and 10% and 4.3% in precision score. Compared with DSiamM, which is updated based on dynamic templates, our algorithm improves AUC by 1.2% and precision score by 1.2% and is three times faster than DSiamM in speed.
On the results of OTB-50
, the proposed algorithm achieves the best performance in both success and precision plots. The proposed algorithm also outperforms other online updated deep tracker, DeepSRDCF, on AUC of success plots, with relative improvements of 4.4% and 4.9%. The proposed algorithm performs better than recent siamese network-based trackers, SiamRPN, CFNet, and SiamFC. Although the proposed algorithm slower than SiamRPN, they get 1.2% and 1.1% relative improvement over SiamRPN, respectively, and both have real-time speed too. Other real-time trackers, Staple, is more likely to track the target with lower accuracy and robustness or may even lose the targets within longer sequences. Specifically, the proposed algorithm has achieved a relative improvement of 9.7% and 13.7% over Staple. These results verify the superior tracking effectiveness and efficiency of our approach.
On the results of OTB-100
, our proposed method, occupies the best one, outperforming the second-best tracker SiamRPN by a gain of 0.5% in AUC and 1% in precision score. Among the trackers using the siamese network, ours outperforms SiamRPN, CFNet, and SiamFC. SiamFC is a seminal tracking framework, but the performance is still left behind by the recent state-of-the-art methods. Even though CFNet and SiamRPN add a performance gain. Incorporating our attention mechanisms to the proposed tracker elevates to an AUC of 64.2% and precision score of 86.1%, leading to a consistent gain of 6%(9%), 7.4%(11.3%) and 0.5%(1%), compared to SiamFC, CFNet, and SiamRPN. Compared with attention-based CSR-DCF and ACFN, our algorithm not only scored higher in AUC and precision score but also faster in speed, which demonstrates that our method achieves robustness. What’s more, the accuracy and success rate of attributes such as fast motion (FM), occlusion (OCC) and scale variation(SV) on OTB-100, our method also win the best.
As for the average speed illustrated in the Table 1, the top three algorithms are SiamRPN, Siamfc3s, and Staple with a respective speed at 200(FPS), 86 (FPS) and 80(FPS). Among the three algorithms, the first two are based on the siamese network, while Staple is based on correlation filtering. The speed of the algorithm in this paper is 77(FPS), which is lower than the first two algorithms because the algorithm in this paper adopts an attention mechanism and template adaptive update strategy to increase the computational load. In spite of this, the algorithm in this paper is close to that of Staple in speed, but the algorithm in this paper has a big gap in AUC and precision score compared with Staple.
4.3.2 Experiments on VOT2016 and VOT2018
VOT2016
For the assessment on VOT2016, we report the performance of some of the best non-siam-based trackers for reference, including CCOT[8], DeepSRDCF[7], SRDCF[5], Staple[2] and CSRDCF[36]. And compared with other siam-based trackers, such as SiamRPN[29] and SiamFC[1]. The EAO curve evaluated on VOT2016 is presented in Figs. 7 and 6 other state-of-the-art trackers are compared. Table 2 and Fig. 7 shows the results of the proposed tracker are on par with that of the state-of-the-art algorithms and are the best with an EAO score of 0.353. The second best tracker, SiamRPN, is much faster than our tracker, while much lower in terms of EAO and Robustness, suggesting that the attention and template update mechanism introduced improves tracking performance. What’s more, our tracker is much faster than CCOT, DeepSRDCF, and CSRDCF, which verifies that our tracker achieves a fast processing speed as well as excellent performance and shows a potential to the practical tracking application.

EAO ranking with trackers in VOT2016 and VOT2018. The better trackers are located at the right. Best viewed on color display
VOT2018
We compare the proposed tracker with 7 state-of-the-art tracking algorithms on VOT2018 dataset. These trackers are: SiamRPN[29], UPDT[3], RCO[26], ECO[6], CCOT[8], Dsiam[19] and SiamFC[1]. We evaluate the proposed method on VOT2018, and report the results in Table 3. As shown in Table 3 and Fig. 7, our method achieves the best EAO score 0.396 and the best accuracy score 0.588. Notably, our method sets a new state-of-the-art by improving 0.013 absolute value, i.e., 1.3% relative improvement, compared to SiamRPN, indicating that the attention and template update mechanism can significantly decrease the tracking failure.
4.4 Qualitative results
To visualize the superiority of the proposed algorithm, we show examples of our tracking results compared to recent trackers (SiamRPN[29], CSR-DCF [36], and SRDCF[5]) on challenging sample video sequences, as shown in Fig. 8.

Qualitative comparison of our method with state-of-the-art trackers on the Tiger1, Jumping, Coke, FaceOcc2, Ironman, Liquor, Matrix, Lemming and Bolt videos, under fast motion, scale variation and occlusion
(1)Fast Motion (FM)
Figure 8 shows the tracking results of the 4 algorithms in Tiger1, Jumping and Coke video sequences, which under the condition of FM. In the Tiger1 video sequences, due to the target’s fast walking, rotating and other factors, the algorithms SiamRPN, CSR-DCF, and SRDCF lose the target, but our method can accurately locate the target. In the Jumping video sequences, due to the target’s jumping and other factors, the algorithms SiamRPN and CSR-DCF lose the target, but SRDCF and our method can accurately locate the target. In the Coke video sequences, due to the target’s motion and other factors, the algorithms SRDCF and CSR-DCF have some drift, but SiamRPN and our method can accurately locate the target.
(2)Scale Variation (SV)
Figure 8 shows the tracking results of the 4 algorithms in FaceOcc2, Ironman and Liquor video sequences, which have been through scale changes. In the FaceOcc2 video sequences, SiamRPN, CSR-DCF and SRDCF drift the target due to scale variation and illumination effect, while our method can save the stable positioning of the target. In the Ironman video sequences, SiamRPN, CSR-DCF and SRDCF lose the target due to scale variation and illumination effect, while our method can save the stable positioning of the target. In the Liquor video sequences, SiamRPN lose the target due to scale variation and similar object interference, while CSR-DCF, SRDCF and our method can save the stable positioning of the target.
(3)Occlusion (OCC)
Figure 8 shows the tracking results of the 4 algorithms in Matrix, Lemming and Bolt video sequences, which have been partially or severely occluded by the target in respective. In the Matrix video sequences, when the target is rotated, the algorithms SiamRPN, CSR-DCF and SRDCF all lose the target, but our method can accurately track the target. In the Lemming video sequences, when the target is occluded, the algorithms CSR-DCF and SRDCF all lose the target, but SiamRPN and our method can accurately track the target. In the Bolt video sequences, when the target is occluded, the algorithm SRDCF lose the target, but CSR-DCF, SiamRPN and our method can accurately track the target.
In these 9 video sequences, other algorithms all have a certain degree of loss or drift, and the algorithm in this paper can accurately locate the target. The reasons that the proposed algorithm performs well can be explained by two main aspects. First, our algorithm contains attention mechanisms and fine-grained details that explain the appearance changes caused by deformation, rotation, and background clutter. Second, for template update, we focus on the previous frame of the target and update it appropriately to take into account the appearance changes.
4.5 Ablation Study
The proposed tracker has two important components, the siamese feature extraction subnetwork(ATT) and the object template updating subnetwork(UPT). We evaluate their concrete contributions in our method by removing each one and checking the performance of degraded trackers on OTB2013. The onlyATT module means that we use the siamese feature extraction subnetwork(ATT) to extract the feature information with only the first frame as the template frame. The onlyUPT module means that we use the first and previous frame as the template frame, and extract the template feature with the backbone network (AlexNet) without using the attention mechanisms. As shown in Table 4, the tracking accuracy decreases if we remove any component from the proposed method. Hence, all two components make positive contributions. Specifically, the second component ‘UPT’ contributes the most. The first component ’ATT’ also plays an important role.
4.6 Parameter Analysis
In the proposed method, we have 5 parameters as shown in Table 5. λ is set as 1, followed by SiamRPN trackers, which is the base of the proposed tracking method. W0 and W1 are trained offline.
Among the other 2 parameters, η is the parameter to balance the two tracking branches and 𝜃 is the threshold of the target that was lost in the previous frame. Inspired by [10], we have conducted parameter analysis for η and 𝜃, Table 6 and Table 7 list the result of setting different values of the two parameters.
For the parameter η, we set the value of η to 0.3, 0.5, 0.7, 0.9 and 0.95, report the tracking precision score and success score (AUC) for each setting, we observe that the proposed method achieves its best performance when η= 0.9.
For the parameter 𝜃, we set the value of 𝜃 to 2, 4, 6, 8 and 10, report the tracking precision score and success score (AUC) for each setting, we observe that the proposed method achieves its best performance when 𝜃= 6.
4.7 Failure case
Although the proposed tracker performs favorably against several state-of-the-art trackers in the benchmark datasets, the proposed method still has some limitations in some complicated scenes. Figure 9 illustrates two failure examples.

Failure examples of the proposed tracker on some representative sequences. Green bounding-boxes indicate ground-truth and yellow ones means our results. Left to right: Bird1 and Soccer
Firstly, let’s start with the analysis of the video of Bird1. As a video with DEF (deformation), FM(Fast Motion) and OV(Out-of-View) at the same time, the target is completely occluded in multiple consecutive frames, the proposed method can hardly obtain the appearance model of the target. Hence the proposed method fails to track the target.
Now it is the discussion of the video of Soccer. As a video with IV(illumination change), SV(Scale Variation), OCC(Occlusion), MB(Motion Blur), FM(Fast Motion), IPR(In-Plane Rotation), OPR(Out-of-Plane Rotation), and BC(background clutters), the target is surrounded with some other similar objects (mainly come from the color of the video), which poses great challenges on the proposed method. Since the proposed method does not learn effective information to discriminate the target and background, it finally fails to locate the target.
5 Conclusion
In the process of visual tracking, the matching of templates and learning of features are crucial to the final tracking algorithm results. In this paper, we present an Adaptive Updating Siamese Network (AU-Siam) for real-time visual tracking. By fusing the siamese feature extraction subnetwork and the object template updating subnetwork with a seamless formulation, the robustness and accuracy of our method have been improved significantly. It is shown that the feature extraction model can be used to obtain more efficient and diverse features by attention mechanisms, which further enhances the robustness of our method. Furthermore, the template updating module can help update the target template in real-time, avoid template shifting problem and improve the final experiment result. It can be found from the experimental results that the proposed AU-Siam approach can outperform the state-of-the-art tracking methods. In the future, we plan to continue exploring the effective fusion of deep networks in tracking task.
References
Bertinetto L, Valmadre J, Henriques JF, Vedaldi A, Torr PH (2016) Fully-convolutional siamese networks for object tracking. In European Conference on Computer Vision Workshop, pages 850-865. Springer. 1, 2, 3, 4, 5, 7, 8
Bertinetto L, Valmadre J, Golodetz S, Miksik O, Torr PHS (2016) Staple: Complementary learners for real-time tracking. In The IEEE Conference on Computer Vision and Pattern Recognition, CVPR, June
Bhat G, Johnander J, Danelljan M, Khan FS, Felsberg M (2018) Unveiling the power of deep tracking. In: ECCV, pp 493–509
Choi J, Chang HJ, Yun S, Fischer T, Demiris Y (2017) Attentional correlation filter network for adaptive visual tracking. In: IEEE Conference on Computer Vision and Pattern Recognition, pages 4807-4816. 2 7
Danelljan M., Ager G. H., Khan F. S., Felsberg M. (2016) Adaptive decontamination of the training set: a unified formulation for discriminative visual tracking. In: IEEE Conference on Computer Vision and Pattern Recognition, pages 1430-1438. 4 7
Danelljan M, Bhat G, Khan FS et al (2017) ECO: Efficient convolution operators for tracking. Proc IEEE Conf Comput Vis Pattern Recognit, page 6
Danelljan M, Häger G et al (2015) Convolutional Features for Correlation Filter Based Visual Tracking. ICCV workshop
Danelljan M, Robinson A, Khan FS, Felsberg M (2016) Beyond correlation filters: Learning continuous convolution operators for visual tracking. In: ECCV, pages 472-488. 1 2 5
Dong X, Shen J (2018) Triplet loss in siamese network for object tracking[C]. Proceedings of the European Conference on Computer Vision (ECCV). 459-474
Dong X, Shen J, Wang W et al (2018) Hyperparameter optimization for tracking with continuous deep q-learning[C].Proceedings of the IEEE conference on computer vision and pattern recognition. 518-527
Dong X, Shen J, Wang W et al (2019) Dynamical Hyperparameter Optimization via Deep Reinforcement Learning in Tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence PP(99):1–1
Dong X, Shen J, Wu D et al (2019) Quadruplet network with One-Shot learning for fast visual object Tracking[J]. IEEE Trans Image Process 28 (7):3516–3527
Dong X, Shen J, Yu D et al (2017) Occlusion-aware real-time object tracking[J], vol 19
Fan DP, Cheng MM, Liu JJ et al (2018) Salient objects in clutter: Bringing salient object detection to the foreground[C]. Proceedings of the European conference on computer vision (ECCV). 186-202
Fu K, Fan D P, Ji G P et al (2020) Siamese network for rgb-d salient object detection and beyond[J]. arXiv preprint arXiv:2008.12134
Fu K, Fan DP, Ji GP et al (2020) Jl-dcf: Joint learning and densely-cooperative fusion framework for rgb-d salient object detection[C].Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 3052-3062
Fu K, Zhao Q, Gu IYH et al (2019) Deepside: A general deep framework for salient object detection[J]. Neurocomputing 356:69–82
Gong C, Tao D, Liu W et al (2015) Saliency propagation from simple to difficult[C].Proceedings of the IEEE conference on computer vision and pattern recognition. 2531-2539
Guo Q, Feng W, Zhou C, Huang R, Wan L, Wang S (2017) Learning dynamic siamese network for visual object tracking. In: ICCV. 1
He A, Luo C et al (2018) A twofold siamese network for real-time object tracking[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 4834–4843
Henriques J, Caseiro R, Martins P, Batista J (2015) Highspeed tracking with kernelized correlation filters. IEEE Transactions on Pattern Analysis and Machine Intelligence 37(3):583–596. 1 3 7
Hu H, Ma B, Shen J et al (2018) Robust object tracking using manifold regularized convolutional neural networks[J]. IEEE Transactions on Multimedia 21(2):510–521
Hu J, Shen L, Sun G (2018) Squeeze-and-excitation networks[C].Proceedings of the IEEE conference on computer vision and pattern recognition. 7132-7141
Jianbing S, Xin et al (2019) Visual Object Tracking by Hierarchical Attention Siamese Network.[J] IEEE transactions on cybernetics
Kristan M, Leonardis A et al (2016) The visual object tracking vot2016 challenge results. In: ECCV, pp 777–823
Kristan M, Leonardis A et al (2018) The sixth visual object tracking VOT2018 challenge results. In: ECCV, pp 3–53
Krizhevsky A, Sutskever I et al (2012) Imagenet Classification with Deep Convolutional Neural Networks[C]. NIPS Curran Associates Inc
Li B, Wu W et al (2019) Siamrpn++:, Evolution of siamese visual tracking with very deep networks[C].Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 4282–4291
Li B, Yan J, Wu W, Zhu Z, Hu X (2018) High performance visual tracking with siamese region proposal network. In: CVPR. 1, 2, 3, 4, 5, 8
Liang Z, Shen J (2019) Local semantic siamese networks for fast tracking[J]. IEEE Trans Image Process 29:3351–3364
Liu F, Gong C, Huang X et al (2018) Robust visual tracking revisited: From correlation filter to template matching[J]. IEEE Trans Image Process 27 (6):2777–2790
Liu F, Gong C, Huang X et al (2018) Robust visual tracking revisited: From correlation filter to template matching[J]. IEEE Trans Image Process 27 (6):2777–2790
Liu P, Yu H, Cang S (2019) Adaptive neural network tracking control for underactuated systems with matched and mismatched disturbances[J]. Nonlinear Dynamics 98(2):1447–1464
Lu X, Ni B, Ma C et al (2019) Learning transform-aware attentive network for object tracking[J]. Neurocomputing 349:133–144
Lu X, Wang W, Ma C et al (2019) See more, know more: Unsupervised video object segmentation with co-attention siamese networks[C].Proceedings of the IEEE conference on computer vision and pattern recognition. 3623-3632
Lukezic A, Vojir T, Cehovin Zajc L, Matas J, Kristan M (2017) Discriminative correlation filter with channel and spatial reliability
Ren S, Girshick R et al (2017) Faster r-CNN: towards Real-Time object detection with region proposal Networks[J]. IEEE Transactions on Pattern Analysis Machine Intelligence 39(6):1137–1149
Sun L, Zhao C, Yan Z et al (2018) A novel weakly-supervised approach for RGB-D-based nuclear waste object detection[J]. IEEE Sensors J 19 (9):3487–3500
Tang Z, Li C, Wu J et al (2019) Classification of EEG-based single-trial motor imagery tasks using a B-CSP method for BCI[J]. Frontiers of Information Technology & Electronic Engineering 20(8):1087–1098
Tang Z, Yu H, Lu C et al (2019) Single-Trial Classification of Different Movements on One Arm Based on ERD/ERS and Corticomuscular Coherence[J]. IEEE Access 7:128185–128197
Tao R, Gavves E, Smeulders AWM (2016) Siamese instance search for tracking. In IEEE Conference on Computer Vision and Pattern Recognition. 1, 2, 3, 7
Valmadre J, Bertinetto L, Henriques JF, Vedaldi A, Torr PH (2017) End-to-end representation learning for correlation filter based tracking. In: CVPR. 1, 2, 3, 4, 8
Wang W, Lu X, Shen J et al (2019) Zero-shot video object segmentation via attentive graph neural networks[C].Proceedings of the IEEE international conference on computer vision. 9236–9245
Wang W, Shen J, Ling H (2018) A deep network solution for attention and aesthetics aware photo cropping[J]. IEEE transactions on pattern analysis and machine intelligence 41(7):1531–1544
Wang Q, Teng Z, Xing J, Gao J, Hu WS (2018) Maybank.Learning attentions: Residual attentional siamese network for high performance online visual tracking. In: CVPR. 1 2
Woo S, Park J, Lee JY et al (2018) CBAM : Convolutional Block Attention Module[J]
Wu Y, Lim J, Yang M-H (2013) Online object tracking: a benchmark. In: CVPR. 2
Wu Y, Lim J, Yang M-H (2015) Object tracking benchmark.TPAMI, 1, 2, 5, 6, 7
Xiao Y, Li J, Du B, Wu J, Chang J, Zhang W (2020) Memu: Metric Correlation Siamese Network and Multi-class Negative Sampling for Visual Tracking. Pattern Recognition, Volume 100. https://doi.org/10.1016/j.patcog.2019.107170
Yilmaz A., Javed O., Shah M. (2006) Object tracking: a survey. ACM Comput Surv 38(4):1–45
Z T, Ghanem B, Liu S, Ahuja N (2012) Robust visual tracking via multi-task sparse learning. In: IEEE Conference on Computer Vision and Pattern Recognition CVPR
Zhang Z, Lai Z, Huang Z et al (2019) Scalable supervised asymmetric hashing with semantic and latent factor Embedding[J] IEEE transactions on image processing
Zhang Z, Peng H (2019) Deeper and wider siamese networks for real-time visual tracking[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 4591-4600
Zhang Y, Wang L et al (2018) Structured siamese network for real-time visual tracking[C].Proceedings of the European conference on computer vision (ECCV). 351-366
Zhou Y, Li J, Du B, Chang J, Xiao Y (2020) A Target Response Adaptive Correlation Filter Tracker with Spatial Attention. Multimedia Tools and Applications. https://doi.org/10.1007/s11042-020-08839-0
Zhu Z, Wang Q, Li B, Wu W, Yan J, Hu W (2018) Distractor-aware siamese networks for visual object tracking. In: ECCV. 1, 2, 3, 6, 7, 8
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was supported in part by the Science and Technology Major Project of Hubei Province (Next-Generation AI Technologies) under Grant 2019AEA170.
Rights and permissions
About this article

Cite this article
Zhou, Y., Li, J., Du, B. et al. Learning adaptive updating siamese network for visual tracking. Multimed Tools Appl 80, 29849–29873 (2021). https://doi.org/10.1007/s11042-021-11154-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-021-11154-x