
Abstract
This study proposed a new image retrieval technique in which the existing radon transform that was used for image retrieval is reinforced with noise invariance. For this, a radon transform was performed on an inquiry image which had been preprocessed to extract vector values and then the vector values were arranged depending on size to extract a second feature vector. After clustering and normalizing the levels of vector values based on the second feature vector, the feature vector was created. For a simulation on the image retrieval technique using the clustering based on rearranged radon transform, diverse images were used in this experiment. For performance analysis, the system proposed was compared with the retrieval system using a rearrangement hough transform based on voting number. As a result, the proposed image retrieval technique was more robust to geometric transforms such as rotated and scaled in the retrieval technique using the general radon transform and standard hough transform, and it had recall enhanced to 0.05 and precision enhanced to 0.04 in comparison with the rearrangement hough transform based on voting number.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
These days, as visual systems are combined with the fields of intelligent robots [3, 4], intelligent transportation systems [8, 9] and medicine [2, 21], its importance as a central technology, which will contribute directly to human welfare projects, has been highlighted.
It is thought that finding geometric elements such as corners and curves including lines from images is a basic task in the computer vision field [5, 6].
A. Rosenfeld and R. Gonzalez introduced the radon transform and the hough transform as representative analysis methods to detect geometric features in images [11, 24]. The radon transform [23] was proposed by Johann radon of Germany in 1917 and in 1971, Godfrey N. Hounsfield of England developed Computerized Tomography(CT) using the radon transform technology.
The radon transform has been widely used for analysis of SAR(Synthetic Aperture Radar) from artificial satellites or air craft, image retrieval, image processing, information protection and line structure analysis.
In particular, for line structure analysis, the hough transform has been frequently used and the hough transform is a special case of the radon transform [25]. The hough transform [13, 14] was proposed by P. hough in 1959 to automatically detect paths of sub-atomic molecules in a bubble box. In 1962, it was registered with the United States Patent and Trademark Office. P. hough transformed straight lines in the Cartesian Coordinate System plane into the inclination of the straight lines and y intercept parameter coordinate plane. Then in 1972, R. Duda and P. Hart introduced the standard hough transform which changes straight lines on the Cartesian Coordinate System plane into ρ, θ parameter coordinate plane polar coordinates [7, 12]. Generally, the hough transform indicates the standard hough transform proposed by R. Duda and P. Hart.
The line structure analysis using the radon transform can effectively analyze corners existing within images, curves in orientation space, and line structure existing within images with a lot of noise as well as line structures existing within images [1, 20].
However, as the radon transform accumulates all pixel values existing in projected images for projection angles and the distances in images for an analysis of the line structure, as the sizes of images get bigger, the amount of calculation increases proportionately, and as a result of the transform, it has the problem of requiring increased memory capacity to store the data generated [17, 22].
As well, the radon transform is vulnerable to geometric transforms although it is robust to noise in detecting features in images.
Therefore, this study proposed a rearranged retrieval algorithm based on the radon transform to solve these problems and develop a system robust to geometric transformations with images.
The system proposed detects vector values by the radon transform through pre-processing of a query image. Then it rearranges the vector values depending on their sizes to detect real feature vectors. Finally, after clustering and normalizing the levels of vector values based on the feature vectors detected, a feature vector table is created.
In comparison with the existing radon transform system which was sensitive to geometric transforms such as rotated and scaled, the rearranged shape retrieval system based on the radon transform had its retrieval performance enhanced.
This study consisted of the following: Chapter 2 describes the pre-processing of the algorithm proposed. Chapter 3 shows the design of an image retrieval technique using the clustering based on rearranged radon transform. Chapter 4 demonstrates the validity of the algorithm proposed through a simulation. Finally, Chapter 5 concludes this study and suggests further research.
2 The radon transform
2.1 The pre-processing process
First, the color images input before the radon transform were transformed into 256 step gray scale images using the method proposed by the National Television Systems Committee, in the U.S.A. [18].
Then to transform them into binary images, edges were detected in the images. Using the gradient method which is sensitive to rapidly changing sections in light and shade and less sensitive to slowly changing sections in light and shade, edge formations were detected from the gray scale images. The gradient method is simple and the processing is relatively fast in comparison with other edge detection methods [10].
Using Otsu’s adaptive threshold algorithm which can effectively detect background and objects, the edge images detected with the gradient method were transformed into binary images. Otsu’s adaptive threshold algorithm determines the threshold to make the maximum variance between areas when a histogram is divided in two by any threshold. This way it is easy to organize when images are divided into two areas and effective in separation of areas [19].
2.2 The radon transform
The radon transform can be used to highlight and detect linear features by making a linear integral of f(x, y), images in two-dimensional Euclidean space and accumulating them in a radon transformed space. Also, due to its peculiar integral function, it is easier to detect features in images that are polluted with noise and it is possible to detect features robust with respect to noise.
As well, from the images projected from many directions, shapes or features of the original images can be recovered. This radon transform is also used for geology or geography such as in soil analysis using reflected waves and frequently for digital image processing such as in pattern recognition or computer vision [26].
The radon transform is defined as a shape projected by lines as far away s as θ from x axis to y axis when images are presented as coordinates as seen in Fig. 1 and can be presented like Eq. (1) in a mathematical way [15].

The coordinates of the projected image
Here g(s, θ) is projection of data which was obtained through a linear integral of the two-dimensional images and s is the length of a normal line from the origin. θ is an angle made by a normal line x axis, and R is an operator of a radon transform. δ is a Dirac delta function.
With an angle θ, images f(x, y) can be presented on turned coordinates (ρ, u) as in Eq. (2).
Equation (2) was substituted into Eq. (1) and can be expressed as Eq. (3).
The Dirac delta function in Eq. (3) is a function for a variable ρ and has the same features as Eq. (4).
Therefore, the radon transform can be expressed as in Eq. (5).
The reasons why the radon transform was noticed in this study are the following: the speed for image differentiation can be enhanced through the radon transform. What is there to consider in comparing random images and identifying similar is the time taken to find similar images by comparing them with a success probability of identifying the similar images. As the images targeted are two-dimensional and in order to compare them, feature vectors had to be extracted from the images. The images were compared with other images using the feature vectors and if the degree of similarity in the feature vectors was high, it would take too much time to compare them all. To solve this problem, if the degree of the feature vectors extracted from the images is lowered, the time to compare images and detect similar images will decrease. As explained above, if the two-dimensional images are transformed into first-dimensional feature vectors, the time taken to compare the images will be faster. In the case when the radon transform was done for identical images, a similar pattern would occur. When the images went through the radon transform, the original image and the images that were similar had a graph with a similar pattern, but in the case of the images being different, the radon transform graph showed different patterns.
This study made the best use of the features of the radon transform which showed similar patterns for similar images using the features of the radon transform.
3 Design of an image retrieval technique using the clustering based on rearranged radon transform
Shape retrieval for general radon object recognition has a problem in that a general radon transform is sensitive to geometric transformations. Therefore, to resolve the problem, the algorithm proposed detected vector values after the radon transform through pre-processing.
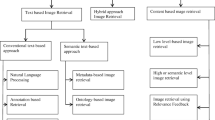
Then, vector values were rearranged according to size and were normalized through level clustering to create a rearranged radon transform whose features were reinforced. Figure 2 shows the flow chart for implementation of the algorithm.

The flowchart of the proposed algorithm
The order is presented as follows:
-
First, through pre-processing of the query images, color images were transformed into gray scale and using the gradient method, edges were detected. Then using the adaptative threshold algorithm, binary images were acquired.
-
Second, all the feature vectors of the binary images detected had the radon transform and two-dimensional radon vector values were obtained as in (b) of Fig. 3.
Fig. 3 
Result of radon transform
-
Third, the vector values as in (b) of Fig. 3 were rearranged according to their size as in Fig. 4.
Fig. 4 
Result of rearranged vector values according to their size
-
Forth, after level clustering of vector values, as in Table 1, and normalization, a feature vector table was created.
Table 1 Feature table -
Fifth, with the use of the feature vector table, the images were compared with those in the database and analyzed.


4 Simulation and analysis
With the algorithm proposed in this study, diverse images were tested with the use of MATLAB 2012 software. In this test, query images were analyzed with the same status. First, the query images were all identical. To explain how to retrieve images, a total of 5,000 images in a database were classified according to type and according to the images analyzed, it was defined that 20 images were detected. The simulation of these algorithms stored in an advance general radon transform algorithm, the standard hough transform algorithm, rearranged hough transform algorithm based on voting number and feature values of a rearranged radon transform algorithm in a database targeting diverse images. Of the data stored, query images alone were calculated without separate calculation when different query images were input and with the use of feature values of data, similarity measurements were compared to obtain the resultant images.
Figure 5 shows representative query images using the simulation, and Figs. 6, 7, 8, 9, 10, 11, 12 and 13 is the results of a simulation of Fig. 5 for query images.

Query image Q1, Q2

The result of the retrieval for the Q1 using the radon transform algorithm

The result of the retrieval for the Q1 using the standard hough transform algorithm

The result of the retrieval for the Q1 using the rearranged hough transform algorithm based on voting number

The result of the retrieval for the Q1 using the clustering based on rearranged radon transform

The result of the retrieval for the Q2 using the radon transform algorithm

The result of the retrieval for the Q2 using the standard hough transform algorithm

The result of the retrieval for the Q2 using the rearranged hough transform algorithm based on voting number

The result of the retrieval for the Q2 using the clustering based on rearranged radon transform
Figures 6 and 10 are the results of (a) of Fig. 5 using the radon transform algorithm, and Figs. 7 and 11 are the results of (a) in Fig. 5 using the standard hough transform algorithm. Figures 8 and 12 are the results of (a) in Fig. 5 using the rearranged hough transform algorithm based on voting number, and Figs. 9 and 13 are the results of (a) in Fig. 5 in the query image using the image retrieval technique using the clustering based on rearranged radon transform proposed in this study.
As a result, it was confirmed that this algorithm detected turned, scaled down and expanded images as similar images, That is, as in Figs. 6, 7, 10 and 11, the results of the image retrieval using the radon transform and the standard hough transform showed that images similar to the original images were detected, but for images whose shapes were distorted, retrieval results were not good. However, it was confirmed that a retrieval system using the rearranged radon transform proposed in this study had a higher retrieval rate for transformed images as in Figs. 9 and 13.
As well, as in Figs. 8 and 12, the rearranged hough transform based on voting number could detect transformed images better than the standard hough transform and radon transform, but as in Fig. 14, it was discovered that the retrieval algorithm proposed using the rearranged radon transform had better performance. An “X” marked in figures indicates images which were not related with the query images.

Performance analysis
To analyze the efficiency of the content based image retrieval, two performance evaluation measures, Recall and Precision were generally used [16]. Recall is the ratio of images retrieved in the images related to a query of the image database, and Precision indicates the ratio of images related to the query in the images retrieved. That is, consider A is a collection of images related within the image database and B is the collection of the images retrieved. If so, Recall and Precision can be defined as conditional probability as in the following Eq. (6).
Table 2 shows the retrieval results of the image retrieval algorithm using a performance index and that is using the rearranged radon transform proposed in this study.
5 Conclusion
This study proposed an image retrieval algorithm using the clustering based on rearranged radon transform for retrieval of information on new shapes which reinforced the noise invariance of the radon transform used for shape based image retrieval.
As for the algorithm, the radon transform was made to query images through pre-processing to obtain each vector value. Then, the vector values were rearranged according to size and after level clustering and normalization, a feature vector table was set up.
Simulation results showed that the algorithm proposed was more robust to geometric transformations such as rotated and scaled images than an algorithm using the existing radon transform, that using the standard hough transform, and that using the rearranged hough transform based on voting number. For house images whose shapes were clearer in each category of image, Recall was 0.16 higher and Precision 0.05 higher than for existing algorithms. For images of motorcycles, Recall was 0.12 higher and Precision 0.05 higher. For cup images, Recall was 0.19 higher and Precision 0.09 higher, which indicates that the algorithm proposed had a higher performance than existing algorithms.
Based on the results above, it is expected that the system proposed can be used as an effective system in recognizing and retrieving a variety of shape information from multimedia data. Also, it is suggested that further research on the development of optimized expressive systems of image feature information, optimized retrieval engines and construction of efficient image databases are required.
As well as ways to improve the retrieval performance by combining a variety of image feature information such as shape, color, texture, motion will also be studied.
References
Aggarwal N, Karl WC (2006) Line Detection in Images Through Regularized Hough Transform. IEEE Trans Image Process 15(3):582–591
Brown RG, Hann CE, Chase JG (2010) Vision-based 3D surface motion capture for the DIET breast cancer screening system. Comput Appl Technol 72–78
Capi G (2010) A vision-based approach for intelligent robot navigation. Intell Syst Technol Appl 97–107
Chatterjee A, Ray O, Chatterjee A, Rakshit A (2011) Development of a real-life EKF based SLAM system for mobile robots employing vision sensing. Expert Syst Appl 8266–8274
Cho B-H, Jung S-H (2008) Efficient correction of a rotated object using radon transform. JKorean Inst Inf Sci Eng (KIISE) 14(3):291–295
Dorado A, Saavedra G, Sola-Pikabea J, Martinez-Corral M (2015) Integral imaging monitors with an enlarged viewing angle. J Inf Commun Convergence Eng 13(2):132–138
Duda RO, Hart PE (1972) Use of the Hough transformation to detect lines and curves in pictures. Commun ACM 15(1):11–15
Fang Y (2010) Fusion-layer-based machine vision for intelligent transportation systems. MIT Thesis
Fishbain B, Mehrubeoglu M (2010) Guest editorial of the special issue on real-time vision-based motion analysis and intelligent transportation systems. Real-Time Image Process 213–214
Gonzalez RC, Richard E (1992) Woods, digital image processing. Addison Wesley
Gonzalez RC, Woods RE (2008) Digital image processing. Prentice Hall, Third Edition
Hart PE (2009) How the Hough transform was invented. IEEE Signal Process Mag 18–22
Hough P (1959) Machine analysis of bubble chamber pictures. Int Conf High Energy Accel Instrum 554–556
Hough P (1962) Method and means for recognizing complex patterns. U S Patent 3(069):654
Kim J (2000) Development of MPEG-7 technology. National IT Industry Promotion Agency, 37–38
Li W-C, Tsai D-M (2011) Defect inspection in low-contrast LCD images using Hough Transform-Based Nonstationary Line Detection. IEEE Trans Ind Inform 7(1):136–147
Luengo Hendriks CL et al (2005) The generalized Radon transform: Sampling, accuracy and memory considerations. Pattern Recogn 38(12):2494–2505
Martiney JA, Rodriguez U, Nechyba M (2003) An automated implementation of eamlets to classify frames of triggered lightning. FCRAR 2003:1–6
Otsu N (1979) A threshold selection method from gray-level histogram. IEEE Trans Syst Man Cybernetics SMC-9:62–66
Park SJ, Ahmad MB, Seung-Hak R, Han SJ, Park JA (2004) Image corner detection using radon transform. LNCS 3046:948–955
Patel M, Lal S, Kavanagh D, Rossiter P (2010) Fatigue detection using computer vision. Electron Telecommun 56(4):457–461
Press WH (2006) Discrete Radon transform has an exact, fast inverse and generalizes to operations other than sums along lines. PNAS 103(51):19249–19254
Radon J (1917) Üer die Bestimmung von Funktionen durch ihre Integralwerte lӓngs gewisser Mannigfalt- igkeiten. Berichte Sӓq chsische Akad Wissenschaften, Leipzig, Math Phys Klasse 69:262–277
Rosenfeld A (1969) Picture processing by computer. Academic, San Diego
Thuc ND, Duc DA (2004) The Hough transform - a radon - like transform. Int Conf Electron Inf Commun 274–275
Won J (1998) Two-dimensional filtering through the radon transform. J Korean Soc Remote Sensign 14(1):17–36
Acknowledgments
This study was supported by research funds from Chosun University, 2014.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
An, Y., Lee, J. & Park, J. Image retrieval technique using the clustering based on rearranged radon transform. Multimed Tools Appl 75, 12983–12997 (2016). https://doi.org/10.1007/s11042-016-3527-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-016-3527-7