
Experimental and numerical results for the dynamic response of an all-FRP (fiber-reinforced polymer) twodimensional frame in free vibration are presented. The frame was assembled of pultruded glass-fiber-reinforced polymer (GFRP) profiles and bolted beam-to-column connections with GFRP angles. To give a variable rotational stiffness to the four beam-to-column major-axis joints, all bolts were tightened by a constant torque of 10, 25, or 40 N · m. Experimental measurements were performed on the three configurations to identify the natural frequencies of the first vibration mode in the plane of the frame and to determine the ability of each structure to dissipate the initial acceleration imposed on it through damping. The results obtained are compared with analytical and finite-element calculations.
It was found that an increased bolt torque improved the dynamic response of the GFRP frame by reducing its vibration time and maximum displacements and by enhancing its dissipation capacity.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The interesting features of glass-fiber-reinforced polymer (GFRP) pultruded profiles, such as the low density and the high strength characteristics [1, 2], have encouraged their use in building and construction both for strengthening applications and for all-FRP structures. In addition to secondary (stairs and walkways of offshore platforms), temporary [3], and emergency structures, other possible applications in civil engineering include the structural rehabilitation of existing decks to increase their flexural stiffness [4], large frame structures [5], and foot bridges [6].
Many issues are now under investigation, mostly concerning the responses of GFRP pultruded profiles under static loading. However, research on the dynamic behavior of the composite structures is not receiving much attention [7, 8].
The lightweight nature of FRP materials and the high live load to dead load ratio of composite structures suggest interesting evaluations of the dynamic behavior of GFRP structures made of open-section pultruded profiles.
The studies directed towards the dynamic aspects concern the response of pultruded profiles [9, 10] and the analysis of beam-to-column joints.
Hollaway and Farhat [11] conducted an early investigation on the response of FRP structures to dynamic actions by means of a finite-element analysis and experimental tests on two models of Perspex and glass-fiber-reinforced polyester. Mosallam et al. [12] proposed and analyzed a solution for the production of a beam-to-column connection made of a pultruded fiber-reinforced polymer and subjected to both static and dynamic actions. The dynamic experimental analyses of the beam-to-column connection designed highlight the greater flexibility and, therefore, the greater dissipation capacity of the bolted joint compared with the connection produced with two-bolt and gluing technologies. Boscato [13] provided an in-depth investigation into the dynamic behavior of GFRP members and two- and three-dimensional frames in free vibration; very large pultruded FRP structure subjected to free vibration was analyzed by Russo [5]. Cunha and Piranda [14] proposed the technique of modal updating to determine the mechanical characteristics of composite materials by means of dynamic tests. The same numeric approach was adopted in [15] for the structural identification of beam-to-column connections and systems built with pultruded profiles. Minghini et al. [16] focused on the determination of vibration frequencies of a FRP portal frame, but Bay et al. [17] analyzed the dynamic behavior of an all-FRP pedestrian bridge.
As for the shear deformability of FRP pultruded profiles, particular attention was focused on the characterization of beam-to-column joints of all-GFRP structures in [18–22]. On this particular issue, a series of studies on the characterization methodology of semi-rigid connections of pultruded profiles was conducted by Turvey [23, 24] and Turvey and Cooper [25]. With regard to bolted joints, the current literature reports different inquiries into the effects of bolt torque on such joints [26–28]. This research provides an in-depth analysis of the dynamic response of an all-GFRP two-dimensional frame in free vibration by quantifying the fundamental dynamic parameters and then assessing their variation at different rotational stiffnesses of a beam-to-column joint. The frame (one bay of 5 m and two storeys of 2.92 m) was assembled of GFRP pultruded profiles connected by GFRP joint elements (seat, top, and web angles) and steel bolts. Different rotational stiffnesses of the beam-to-column joint were created by a constant bolt torque of 10, 25, or 40 N · m. A complete analysis was performed to examine the beam-to-column joint and to assess the dynamic response of the frame. The rotational capacity of the beam-tocolumn joint was characterized by using experimental and numerical approaches. In the numerical analysis, the well-known component method [29–31] was adopted. The dynamic behavior of the frame was investigated, neglecting the viscous effects, by using the modal analysis. The dynamic parameters (the first flexural frequencies in the frame plane, displacements, and the damping ratio) were determined for each configuration (10-, 25-, and 40-N · m bolt torques) by numerical, experimental, and finite-element methods. The numerical analysis was carried out on the macromechanical level [32, 33].
1. Basic Assumptions
The all-GFRP frame consisted of primary members composed of two “C” GFRP channel sections (the cross-sectional sizes were 240 × 72 × 12 mm for the column and 140 × 48 × 8 mm for the beam) made from glass fibers and a thermosetting vinylester matrix. The characteristics of cross sections of the profiles and the constitutive law of the material were defined by the pultrusion process [8]. The mechanical characteristics of the composite material according to the tests described in UNI EN 13706 [34], which were performed directly on the material, were as follows: tensile strengths f z = 354 MPa and f x,y = 73 MPa; tensile moduli E z = 24.322 GPa and E x,y = 8.99 GPa; shear moduli G xy = 3.654 GPa and G zx,zy = 3.172 GPa; Poisson ratios ν xy = 0.23 and ν zx,zy = 0.09; density ρ = 1700 kg/m3; volume fraction of fibers V = 40%.
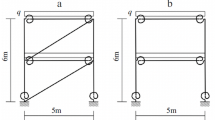
The frame had a single bay with a 5000-mm distance between the longitudinal axes of columns c1 and c2 and two storeys with 2920- and 2840-mm distances between the longitudinal axes of beams b1 and b2, as shown in Fig. 1.

General sizes (a) and the global view (b) of the frame, beam-to-column joints (c and d), and column base joint (e).
The coordinate axes of the frame are designated by X, Y, and Z (Fig. 1a), where YZ defines the frame plane. Figure 1b shows the general view of the frame, but Figs. 1c and 1d — the beam-to-column joint; Figure 1e depicts the base joint of the column. The coordinate axes of frame constituents are designated by x, y, and z, with the z-axis in their longitudinal direction (pultrusion direction) and x and y in the transverse directions (Fig. 2).

Details of the column joint (a) and beam-to-column joint (b): 1 — fiber direction; 2 — steel element; 3 — “C” profile; 4 — section A-A; 5 — section B-B; 6 — welded joint. Dimensions in mm.
The sizing of the GFRP two-dimensional frame was performed based on the following hypotheses: linear elastic behavior with conservation of plane sections, shear deformability of GFRP structural elements, and rigidly clamped columnbase joints [13]. The geometric features of each composite structural element, beam and column, are listed in Table 1.
Figure 2 illustrates the details of the column-base joints and beam-to-column connections. In the case of the beam-tocolumn joint, the plate pbc (beam-column plate, 352 × 140 × 8 mm) contributes to building the connection between the “C” profiles of the beams and columns (Fig. 2b).
The connection elements — such as the web angle (wa, 48 × 145 × 8 mm), top and seat angles (ta and sa, 75 × 75 × 8 mm), and the plate (pbc) — of the beam-to-column connection are all in GFRP, and the bolts are of type M8 in 8.8-class steel (Fig. 2b). The base plate for column-base joints, a steel plate of thickness 10 mm, is bolted to a reinforced concrete floor. The columns are fixed to the steel plate by welded steel angular bars of thickness 8 mm and bolts (8.8-class steel) M12 and M14 for column flanges and web, respectively (Fig. 2a).
2. Characterization of the Beam-to-Column Joint
2.1. Numerical approach
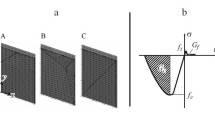
The simplified procedure proposed by Faella et al. [31], which is the well-known component method, was adopted to define the rotational stiffness of the beam-to-column joint of the GFRP frame. The behavior of the joint was clarified by identifying the shear, compression, and tension zones in constituents of the beam-to-column connection (Fig. 3).

Mechanical models of the beam-to-column joint. Explanations in the text.
To analyze the strength and rotational properties of the joint, the areas of its constituents were determined for each of rows 1, 2, 3, and 4 and for rows of bolts and column web in compression (cwc), column web in shear (cws), and bolts of the seat angle in shear (bs) and the seat angle in bearing (sab), as shown in Fig. 3. In the numerical analysis, the contribution of the connection plate pbc (Fig. 2b) was ignored because of its small dimensions.
The initial rotational stiffness K φ of the beam-to-column joint of the GFRP framework was determined by the formula
where
Here, K i is the equivalent stiffness of each bolt row (see Fig. 3a), h i is the distance between an ith bolt row and the center of compression (at the half-thickness of the angular flange of the compression zone close to the beam), and n b is the number of bolt rows.
The contribution of all bolt rows is represented by a spring of stiffness K t operating in accord with the center of tension (see Fig. 3b):
The stiffness of the column web in compression K cwc is
where the effective width of the column web in compression \( {{b^{\prime}}_{{\mathrm{eff}.cwc}}} \) is
Here, d wc is the clear depth of the column web, t wc is thickness of the web column, t sa is thickness of the seat angle, t fc is thickness of column flange, r sa is the fillet radius of the seat angle (Fig. 3a), and E x,y is the transverse elastic modulus.
Based on the relationship between the initial rotational stiffness K φ of the joint (Eq.(1)) and the flexural stiffness of the connected beam, the classification of joints according to their stiffness, as described in Eurocode 3 (EN 1993-1-8:2005) [35], identifies the beam-to-column connection of the frame as a semi-rigid joint:
where K φ (the initial rotational stiffness of the joint) is equal to 610.3 kN · m/rad according to Eq. (1), I xx is the major second moment of cross-sectional area of the beam, L b is the length of the beam between the centroid axes of the columns, and E z is the longitudinal elastic modulus. At E z I xx /L b = 59 kN · m, the limits of semi-rigid action of the joint are 29.5 and 1475 kN · m.
2.2. Experimental approach
To determine the actual rotations of the GFRP frame (induced by excitations applied to identify the dynamic response in the region of free vibrations), the column-base joints (Fig. 2a) and the two beam-to-column connections (Fig. 2b) were monitored by using inclinometers. In particular, the inclinometers used had a sensitivity of 25 mV/deg, with a data acquisition resolution of ±0.17 mrad and the limits of noise detection of ±0.35 mrad.
The rotation capacities of the beam-to-column connection and column-base joints were estimated with account of the fact that the bolts were tightened by using a torque wrench with a bolt clamping torque permitted by ISO 2320:2008 [36]. A bolt torque of 25 N · m was applied to the M8 bolts of the beam-to-column connections, while the M12 and M14 bolts of the column-base joints were tightened to a constant torque of 77 and 133 N · m, respectively.
The excitations were created in and out of the plane of the frame (in the Y- and X-directions), as shown in Fig. 4a, by means of an automatic instrumented hammer.

Equipment for characterization of the beam-to-column joint (a) and modal analysis (b). ●, H — excitation on I max; ▲, H — excitation on I min; ■, T — inclinometer; *, A — accelerometer. Dimensions in mm.
Inclinometers T1 and T2 recorded the rotation angle φ of the column-base joint around the X- and Y-axes, while T3 and T4 monitored the rotation angles φ of the beam-to-column joint in the frame plane (around the X-axis). Rotations were considered positive in the clockwise direction (Fig. 4a). Figure 5 illustrates the data recorded by each inclinometer. Inclinometers T1 and T2 did not register significant rotations, which demonstrated that, within the specific range of excitations (2.0 · 10−18 to 5.0 · 10−18 N · m), the column-base joints were effectively rigid, as shown in Fig. 5. Concerning excitation H7 in the frame plane, the greatest rotations, equal to ±1 mrad, were recorded by T3 and T4 (Fig. 5).

Rotation angles φ as functions of time t, measured by inclinometers T1 (a), T2 (b), T3 (c), and T4 (d). Designations as in Fig. 4.
This result shows that the excitations performed for the dynamic identification caused negligible displacements and rotations.
The modal analysis was conducted by means of a single-input and multi-output measurement procedure. The GFRP frame was excited locally by an instrumented hammer, and the dynamic responses were recorded by a set of accelerometers with the use of the same equipment and procedure utilized in [10]. A symmetric configuration was analyzed for part of the frame — four accelerometers were positioned on only one column (A1, A2, A3, and A4) and three accelerometers on each beam of the first (A9, A5, and A10) and second (A7, A6, and A8) stories, as shown in Fig. 4b, to enable the detection of the first three vibration modes.
To evaluate the rotational stiffness of beam-to-column connections with various bolt torques equal to 10, 25, and 40 N · m, modal analyzes were performed for single beams (b1 and b2 in Fig. 1) to determine, at a midspan excitation, the fundamental frequency of the first flexural mode and the corresponding acceleration (Figs. 6 and 7).

Spectra of fundamental frequencies (a) and vibration modes of beam b1 at excitation H12 and bolt torques of 10 (b), 25 (c), and 40 N · m (d). For a: M = 10 (1), 25 (2), and 40 N · m (3). e — eigenvector and l — axial position of accelerometer.

Spectra of fundamental frequencies and vibration modes for beam b2. Other data and designations as in Fig. 6.
Beam b2 withstood the maximum displacements in the frame plane (Fig. 6) and showed noticeably lower frequencies and accelerations than b1 (Fig. 7). To illustrate the fundamental frequencies of flexural vibrations, Figs. 6 and 7 show the first three flexural modal shapes for each bolt torque considered.
Through an analysis of beam b1 (Fig. 6), the beam-to-column joint (Fig. 2b) was characterized for each bolt torque. From the maximum acceleration g, recorded at the midspan by A5, the flexural displacement η and the rotation angle φ at the beam end were calculated. The corresponding rotational stiffness K φ of the joint was found by Eq. (1) (see Table 2).
3. Analysis of the Dynamic Response
3.1. Experimental results
The frame was monitored under excitations applied in the frame plane along the direction of the major second moments of cross-sectional area (Y-direction) at bolt torques of 10, 25, and 40 N · m (Fig. 4b).
Figure 8 illustrates the dynamic response of the column in the region of free vibrations at excitation H8 (Fig. 4b), which caused the maximum displacements in the frame plane, corresponding to accelerometer positions A1, A2, A3, and A4 (Fig. 4b).

Spectra of fundamental frequencies and vibration modes of column at excitation H8. Other data and designations as in Fig. 6.
The dynamic response of the frame subjected to excitation H8 is characterized by the dynamic parameters given in Table 3, which were recorded at the same time by the accelerometers placed on the column and beams (Fig. 4b).
Table 3 presents the fundamental frequencies f 0, the related vibration time T0, and the coefficient of variation (COV) between column c1 and beams b1 and b2.
The results for the 10-Nm bolt torque had a high variation (see the COV column in Table 3), while the difference between results for the beams and column decreased dramatically with increasing bolt torques.
For each structural element, the variation in the fundamental frequency with increasing bolt torque was almost constant and fell in the 31-37% interval. Only the column showed a 20% increase in the fundamental frequency at bolt torques growing from 10 to 25 N · m. Table 4 presents the accelerations g and displacements (displ.) recorded in the frame plane at the top of column by accelerometer A4 (in the Y- direction) and at the midspan of both beams, by A5 for beam b1 and A6 for b2 (in the Z-direction) at excitation H8 (Fig. 4b). The maximum displacements decreased by 51% for the column and by 73-63% for beams b1 and b2 with bolt torque increasing from 10 40 N · m.
3.2. Damping
The dissipation capacity of the GFRP frame in the region of free vibrations was characterized by the damping ratio ζ. This ratio, which depends on the mechanical properties of composite materials, but not on excitation amplitude, was calculated from the acceleration–time sinusoids, registered by all accelerometers, with the use of the logarithmic decrement.
Table 5 shows damping ratios, at the three constant bolt torques considered, for the column and beams b1 and b2 at excitation H8 (Fig. 4b).
The effects of different bolt torques on the damping ratio are evident for the column member — with growth in bolt torque from 10 to 25 N · m, the ratio increased by 3%, while the increment in torque from 25 to 40 N · m increased the ratio by 21%. The structural continuity of the beam-to-column joint achieved with a higher tightening torque guarantees a global improvement in the dissipation capacity.
Figure 9 displays the free vibrations of the frame (at bolt torques of 10, 25, and 40 N · m) subjected to excitation H8 through the exponential interpolation curves of peak values of the acceleration–time spectra recorded by accelerometers A4, A5, and A6.

Exponential interpolation curves of peak values of acceleration–time spectra registered by accelerometers A4, A5, and A6 at excitation H8 with M = 10 (1), 25 (2), and 40 N · m (3).
Tightening of the beam-to-column joint with a 40-N · m bolt torque increased the capacity of the beam to dissipate the initial acceleration only slightly. As for beams, the best response in terms of accumulation of the initial acceleration and the dissipation capacity was recorded for beam b1, whose configuration was stiffer than that of beam b2 (Fig. 1).
3.3. Finite-element analysis
The modal analyses of the GFRP structural system were performed by using a commercial finite-element code (Strand7, Release 2.2.3), highlighting the main flexural modes and the corresponding vibration frequencies. The solution method was the analysis of eigenvalues of free vibrations, where the eigenvalues for each vibration mode were calculated. Each of the calculated natural frequencies corresponds to an eigenvector that, through nodal displacements, determines the free vibration mode of the frame. The computation was carried out taking into account the total mass participation factors (always >80%) and the dominant free vibration mode shapes. The GFRP structural elements were modelled by two-node beam elements, which were assumed to be isotropic in terms of the physical and mechanical properties (E z , G xy , ν xy , and ρ) given previously. Assuming that the thick GFRP beams and columns of the frame were shear-sensitive, the Strand7 beams were modelled using the thick-beam formulation based on the Timoshenko theory of beams [37]. The finite-element analysis (FEA) was conducted in the linear elastic statement by assuming that the material was homogeneous.
The beam-to-column joint was modelled by assuming a constant rotational stiffness of the four end beam nodes according to experimental results (Table 3), while the column-base joint was considered rigidly clamped. The stiffness K φ was applied directly to each end beam node in the X-axis direction (Fig. 1) to enable the beam-to-column joints to rotate in the frame plane (YZ plane). Table 7 compares the natural frequencies obtained by using the FEA approach and the experimental analysis (Exp).
4. Comparison of the Results and Design Procedure
The experimental results (Exp) and data obtained by the finite-element analysis (FEA) show good agreement. As for the numerical approach, the values calculated by Eq. (14), with a 0.45% variation, are comparable to the experimental (Exp) and FEA results (Table 7) for the configuration with a 25-N · m bolt torque. By using the finite-element analysis to determine the first undamped natural frequencies of the frame, it was easy to evaluate the dynamic response in the case of infinite rotational stiffness of the four beam-to-column joints. This simulation showed an increase in the fundamental frequency by 24% compared with that for the 40-N · m bolt torque configuration.
5. Conclusions
The dynamic responses of an all-GFRP two-dimensional frame in the region of free vibrations and the effects of different rotational stiffnesses of beam-to-column joints have been investigated. From the results obtained, the following conclusions can be drawn.
-
Though the analysis focused on a specific case, the methodologies proposed and the results for the dynamic response of the frame upon increasing its rotational stiffness provide guidance for other cases, too.
-
The increase in the bolt torque from 10 to 40 N · m improved the structural continuity of the beam-to-column joint by about a factor of 6 and, thus, also improved the structural interaction among the pultruded profiles considerably. Therefore, the design of beam-to-column joints with a higher rotational stiffness can be considered as an effective way to improve their dynamic parameters.
-
An increased bolt torque improved the dynamic response of the GFRP frame, reducing the vibration time by a factor of two and decreasing the maximum displacements.
-
The fundamental frequency increased by up to 58% at higher bolt torques. The increase in bolt torque from 10 to 40 N · m improved the dissipation capacity by 24%. In particular, the damping ratio ζ of the column at the maximum torque was 3.15%.
-
During the lifetime of the bolted GFRP structure, owing to viscoelasticity of the FRP material, the bolt tension imposed by the initial bolt torque decreased. As a result, the structural continuity of beam-to-column joints was reduced, which affected the global dynamic response of the frame. Further research is needed to quantify the deterioration of the dynamic parameter over a longer period of time to refine the design and maintenance guidance and to plan the monitoring activity.
References
ASCE, Structural Plastic Design Manual. American Society Civil Engineering, ASCE, Vol. 1 and 2, Reston, Va, (1984).
G. D. Sims, A. F. Johnson, and R. D. Hill, “Mechanical and structural properties of a GRP pultruded section,” Composite Structures, 8, 173–187 (1987).
A. Dicuonzo, F. Laudiero, F. Minghini, and N. Tullini, “Design and construction of a temporary structure composed by FRP pultruded profiles,” Proc. of the 4th Int. Conf. on FRP Composites in Civil Engineering (CICE 08), Zurich, Switzerland, 22–24 July (2008).
G. Boscato and S. Russo, “Structural performance of an iron-wood-FRP pedestrian bridge,” Proc. of the 4th Int. Conf. on FRP Composites in Civil Engineering (CICE 08), Zurich, Switzerland, 22–24 July, 2008.
S. Russo, “Experimental and finite element analysis of a very large pultruded FRP structure subjected to free vibration,” Composite Structures, 94, Iss. 3, February, 1097–1105 (2012).
T. Keller, “Use of Fiber-reinforced Polymers in Bridge Construction,” Structural Engineering Documents n.7, Inter. Assoc. for Bridge and Structural Engineering (IABSE-AIPC-IVBH), Zurich, Switzerland (2003).
L. C. Bank, Composites for Construction – Structural Design with FRP Materials, John Wiley & Sons, Inc., Hoboken, N.J. (2006).
S. Russo, Strutture in Composito: Sperimentazione, Teoria e Applicazioni, Ed. by Ulrico Hoepli, Milano, Italy, (2007).
A. S. Mosallam and M. K. Abdelhamid, “Dynamic behaviour of PFRP structural sections,” Composite Material Technology, Proc. ASME Energy Sources Tech. Conf. and Expo., PD-Vol. 53, ASME, 1993, 37–44 (1993).
G. Boscato and S. Russo, “Free vibrations of pultruded FRP elements: mechanical characterization, analysis, and applications,” J. of Composite for Construction, ASCE, 13, No.6, 565–574 (2009).
L. Hollaway and A. M. Farhat, “Vibrational analysis of a double-layer composite material structure,” Composite Structure, 16, No. 4, 283–304 (1990).
A. S. Mosallam, M. K. Abdelhamid, and J. H. Conway, “Performance of pultruded FRP connections under static and dynamic loads,” J. of Reinforced Plastics and Composites, 13, No. 5, 386–407 (1994).
G. Boscato, Dynamic Behaviour of GFRP Pultruded Elements, Publ. by University of Nova Gorica Press, P.O. Box 301, Vipavska 13, SI-5001 Nova Gorica, Slovenia. ISBN 978-961-3611-68-7 (2011).
J. Cunha and J. Piranda, “Application of model updating techniques in dynamics for the identification of elastic constants of composite materials,” Composites Pt. B: Engineering, 30, No.1, 79–85 (1999).
J. Cunha, E. Foltête, and N. Bouhaddi, “Evaluation of stiffness of semi-rigid joints in pultruded profiles from dynamic and static data by using model updating technique,” Engineering Structures; 30, No. 4, 1024–1036 (2008).
F. Minghini, N. Tullini, and F. Laudiero, “Dynamic and buckling analysis of FRP portal frames using a locking-free finite element,” Proc. of the 4th Int. Conf. on FRP Composites in Civil Engineering (CICE 08), Zurich, Switzerland, 22–24 July, 2008.
Y. Bai, T. Keller, and T. Valleé, “Dynamic behaviour of an all-FRP pedestrian bridge,” Proc. Asia-Pacific Conf. on FRP in Structures (APFIS 2007), Inter. Institute for FRP in Construction, Hong Kong, China, 12–14 December 2007. p. 1075–1080 (2007).
L. Hollaway, Adesive and bolted joints, Polymer and Polymer Composites in Construction, Ed. Hollaway, T. Telford, London, UK (1990).
J. T. Mottram and Y. Zheng, “Further tests on beam-to-column connections for pultruded frames: Web-cleated,” J. of Composite for Construction, 3, No. 1, 3–11 (1999).
J. T. Mottram and Y. Zheng, “Further tests on beam-to-column connections for pultruded frames: flange-cleated,” J. of Composite for Construction, 3, No. 3, 108–116 (1999).
S. J. Smith, D. Parson, and X. D. Hjelmstad, “Experimental comparison of connections for GFRP pultruded frame,” J. of Composites for Construction, 3, No. 1, 20–26 (1999).
A. S. Mosallam, Design Consideration for Pultruded Composite Beam-to-Column Connections Subjected to Cyclic and Sustained Loading Conditions”, ACMA, Arlington, VA (1997).
G. J. Turvey, “Analysis of pultruded glass reinforced plastic beams with semi-rigid end connections,” Composite Structures, 38, Nos. 1–4, 3–16 (1997).
G. J. Turvey, “Flexure of pultruded GRP beams with semi-rigid end connections,” Composite Structures, 47, 571–580 (1999).
C. Cooper and G. J. Turvey, “Semi-rigid column base connections in pultruded GRP frame structures,” Composite Structures, 76, 77–88 (2000).
C. Cooper and G. J. Turvey, “Effects of joint geometry and bolt torque on the structural performance of single bolt tension joints in pultruded GRP sheet material,” Composite Structures, 32, 217–226 (1995).
J. L. Clarke, Structural Design of Polymer Composites: EUROCOMP Design Code and Handbook, London: E & FN Spon (1996).
J. T. Mottram, “Friction and load transfer in bolted joint sof pultruded fiber reinforced polymer section,” Proc. of 3th Int. Conf. on FRP Composites in Civil Engineering, (CICE 2004), Adelaide, Australia, 8–10 December 2004. p. 845–850 (2004).
J. P. Jaspart, “Recent advances in the field of steel joints – Column bases and further configurations for Beam-to Column Joints and Beam Splices,” Thesis Université de Liège, Liège (1997).
J. P. Jaspart, M. Braham, and F. Cerfontaine, “Strength of joints subjected to combined action of bending moment and axial force,” In Proc. of the Conf. Eurosteel ’99, CVUT Praha, Czech Republic, 26–29 May 1999. p. 465–468 (1999).
C. Faella, G. Rizzano, and V. Piluso, “Structural steel semirigid connections: theory, design and software,” CRC Press LLC, Boca Raton, Florida, 2000. p. 222–287 (2000).
L. C. Bank, J. Yin, L. Moore, D. J. Evans, and R. W. Allison, “Experimental and numerical evaluation of beam-to-column connections for pultruded structures,” J. of Reinforced Plastics and Composites, 15, 1052–1067 (1996).
A. M. Harte and D. Mc Cann, “Finite element modeling of the semi-rigid behavior of pultruded FRP connections,” J. of Materials Processing Technology, 119, 98–103 (2001).
UNI EN 13706. Compositi plastici rinforzati – Specifiche per profili pultrusi, UNI EN 13706-1 Designazione, UNI EN 13706-2 Metodi di prova e requisiti generali, UNI EN 13706-3 Requisiti specifici (2003).
EN 1993-1-8:2005, Eurocode 3, Design of Steel Structures, Part 1–8, Design of joints, (2005).
ISO 2320:2008. Prevailing torque type steel hexagon nuts – Mechanical and Performance Properties (2008).
S. P. Timoshenko and W. S. Krieger, Theory of Plates and Shells, McGraw-Hill Book Company, N. Y., 2nd ed., 1959, reissued 1987.
Acknowledgements
The authors would like to thank I. Aldreghetti, G. Busetto, M. Celebrin, G. Costantini, L. Massaria, V. Scafuri, and I. Tofani from LabSCo (Laboratory of Strength of Materials) of the IUAV University of Venice for the support rendered during the tests.
Author information
Authors and Affiliations
Corresponding author
Additional information
Russian translation published in Mekhanika Kompozitnykh Materialov, Vol. 48, No. 6, pp. 945–962, November-December, 2012.
Rights and permissions
About this article
Cite this article
Boscato, G., Russo, S. Free vibrations of a pultruded GFRP frame with different rotational stiffnesses of bolted joints. Mech Compos Mater 48, 655–668 (2013). https://doi.org/10.1007/s11029-013-9310-1
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11029-013-9310-1