
Results of a study to create a high-precision system for determining astronomical azimuth are presented. The composition, structural features, and algorithmic support of the device are considered. Results of an estimation of the precision of azimuthal measurements that confirm the high precision characteristics of the device are presented.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
An automatic system of determining astronomical azimuth has been developed and produced at the Institute of Engineering Physics working together with the Elektropribor Scientific Research Institute. The system is characterized by a standard deviation of astronomical azimuth equal to 0.7″ during a measuring period of at most 60 min (in an automatic regime) and a standard deviation of the transmission of the direction to an external control element of less than 0.5″. By virtue of these characteristics, the metrological requirements in control of the precision characteristics and calibration of all the well-known high-precision gyrocompasses and gyrotheodolites may be fulfilled in the course of operation.
The design of the newly created device and method of measuring azimuth [1] as well as the precision of the initial data used to calculate the ephemerides of stars were investigated in order to achieve a high level of precision. In the present study we will present the basic structural designs adopted in the development of an automatic system of determining astronomical azimuth, a new algorithm for determining astronomical azimuth that takes into account the structural features of the article will be proposed, and results of tests that confirm the high precision characteristic of the device will be presented.
Structural Features of Automatic System of Determining Astronomical Azimuth. The principle of operation of classical astronomical instruments used to determine azimuth consists in sequential stellar guidance and terrestrial-reference guidance and taking readings from a horizontal circle of instruments. The recording time needed for calculating the visible coordinates of a star are established, the horizontal angle between the directions to the star and a terrestrial reference are determined from the difference in the readings, and the astronomical azimuth of the reference geodetic direction then calculated [2–5]. The principal drawbacks of such solutions include the prolonged period of the observation sessions (large number of receptions), the stringent requirements imposed on the skill of the operators, and the need to conduct inspections of the device prior to observations in order to exclude different components of the instrumental error [3–5].
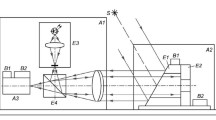
The scheme of the automatic system of determining astronomical azimuth is presented in Fig. 1. The device consists of an optical system constructed according to an autocolliminating circuit and a control element represented by two structurally linked mirrors, an inclined mirror 8 and a vertical mirror 9. Through the use of the control element, an mage of a star and an autocollimated image of the sighting mark obtained in the reflection of the beam from the mirror 9 may be simultaneously situated in the field of vision of the astronomical sight. The normal to the surface of the mirror 9 specifies the reference geodetic direction.

Automatic system of determining astronomical azimuth: 1) CCD recording camera; 2, 3, 10, 11) electronic level sensors; 4) illuminator of measuring mark; 5) cubic prism; 6) lens; 7) astronomical illuminator; 8) inclined mirror of control element; 9) vertical mirror of control element; 12) mounting plate.
The operating principle of the automatic system of determining astronomical azimuth consists in a determination of the horizontal angle between the direction to the Pole Star, which is constantly in the field of vision, and the normal to the surface of the mirror 9 with fixation of the result to the correct time scale. The apparent azimuth of the Pole Star is calculated at the moment the frame for the coordinates of the location of the automatic system of determining astronomical azimuth is recorded. The transmission of the reference direction to the user consists in a determination of the horizontal angle between the normal to the surface of the internal control element and the control element of the reference device.
These precision characteristics of the automatic system of determining astronomical azimuth are achieved with the following technical, software, and procedural designs:
-
1)
the use of photoelectric recording by means of CCD camera 1 (cf. Fig. 1), which eliminates the observer’s error in order to increase the precision and efficiency with which the astronomical azimuth is determined;
-
2)
the use of a mathematical software complex for processing the signals of the CCD array, which assures high-precision determination of the coordinates of the energy centers of the images with subpixel resolution;
-
3)
the use of a thermally undisturbed autocollimator circuit;
-
4)
the use of a control element with stationary angle of sight and continuous control of its angular position relative to a sight-autocollimator in order to eliminate collimation and the inclination of the horizontal axis as well as assure stability;
-
5)
the use of Talyvel 5 electronic levels (Great Britain), which have an error of 0.2″, to monitor the positon of the photodetector block and the control element relative to the plane of the horizon;
-
6)
the use of a horizontal instrument circuit to eliminate deflection error [6];
-
7)
the development of a software module by the Institute of Applied Astronomy of the Russian Academy of Sciences (St. Petersburg) (with mandatory updating of files with data on the parameters of the Earth’s rotation twice a year) to assure high-precision information on the ephemerides of a star; and
-
8)
statistical processing of a large file of data arriving each second (for example, 3600 frames are processed in the azimuth measurement regime).
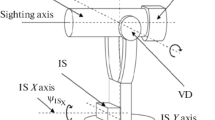
In implementing the automatic system of determining astronomical azimuth using the circuit that has been presented here (cf. Fig. 1), observations of the star that is being located and the measuring mark are performed in different planes (unlike the classical astronomical instrument), since the image of a star is created in the image plane by means of mirror 8 while the autocollimated image of the measuring mark is created in the vertical plane of the CCD array by means of mirror 9 (Fig. 2). We denote by OX k Y k Z k and OX m Y m Z m the coordinate systems of the vertical part of the control element and of the CCD array, respectively, and N k and OX k normals to the surface of mirrors 8 and 9, respectively. The autocollimated image of the measuring mark (cross) and the image of the star are indicated in the plane of the CCD array. The OX m axis is the optical axis. The components of the angles (vertical N v and horizontal N h ) between the positions of the normal to the surfaces of the inclined and vertical parts of the control element (cf. Fig. 2) are also shown.

Creation of images of a star and a measurement mark: 1) plane of projection; 2) plane of CCD array.
Another major feature of the implementation of the device in this circuit lies in the absence of a structural relation between the control elements and the CCD array. Monitoring of the relative position of the control elements and the CCD array is realized on the basis of an autocollimated image of the measuring mark and by means of electron levels.
It was then necessary to develop an algorithm for determining astronomical azimuth by means of the automatic system of determining astronomical azimuth on the basis of the structural features of the astronomical sight and differences in the design circuit of the device from the classical circuit.
Algorithm for Determining Astronomical Azimuth. The basic idea of the algorithm lies in a determination of the horizontal angle between the optical axis of the device and the direction to the star, the translation of this angle from the image plane to the plane of the horizon, and calculation of the azimuth of the normal to the surface of mirror 9, taking into account the position of the element relative to the device. The CCD array and images of the energy centers of the star and the autocollimated image of the measuring mark are presented in Fig. 3.

Field of vision of automatic system of determining astronomical azimuth: 1) trajectory of movement of image of star; 2) image of measurement mark; 3) pole; 4) point of intersection of optical axis and CCD array; 5) image of star.
The following are the initial data for determining the astronomical azimuth at time j (cf. Figs. 2 and 3):
-
the coordinates of the energy center of the image of the star in the CCD array in each frame (syp j , szp j );
-
the coordinates of the energy center of the autocollimated image of the measuring mark in the CCD array in each frame (cyp j , czp j );
-
the coordinates of the optical axis of the device in the CCD array (Oyp j , Ozp j );
-
the scale factor for translating measurements from pixels into seconds of arc (p);
-
the angles between the normals to mirrors 8 and 9 in the two planes (N h , N v );
-
the readings of the detectors of the electronic levels mounted in the recording camera (θ mj , ψ mj ) and in the control element (θ kj , ψ kj ); and
-
the apparent coordinates of the star determined at the moment of recording each frame (A a.s.j , N a.s.j ).
The determination of the astronomical azimuth is performed according to the following algorithm:
-
1.
A coordinate system OX m Y m Z m bound with the CCD array (cf. Fig. 2) is introduced. The axis OX m is oriented along the optical axis and the axes OY m and OY m along the rows and columns of the CCD array, respectively. The center of the coordinate system OX m Y m Z m is at the point of intersection of the optical axis and the CCD array.
-
2.
With the use of the coordinates of the autocollimated image of the measuring mark in the CCD array and of the coordinates of the optical axis of the scale factor in each frame, the horizontal angle between the normal to mirror 9 and the optical axis of coordinate system OX m Y m Z m is then determined:
$$ c{y}_j = 0.5p\left(Oy{p}_j - cy{p}_j\right)\cdot $$(1)On the basis of the law of light refraction, a double value of the angle is represented in the CCD array, for which purpose a coefficient of 0.5 is inserted into Eq. (1).
-
3.
A coordinate system OX k Y k Z k bound with the control element is introduced. The axis OX k is oriented along the normal to mirror 9 and the axes OY k and OY k along the horizontal and vertical faces of this mirror, respectively. The center of the coordinate system OX k Y k Z k is at the point of intersection of the optical axis and the mirror 9.
-
4.
The vector of the normal to mirror 8 in the coordinate system OX k Y k Z k is specified thus:
$$ {\mathbf{N}}_{\mathbf{k}}=\left[\begin{array}{c}\hfill \cos\;\left({N}_g\right)\kern1em \cos\;\left({N}_v\right)\hfill \\ {}\hfill \cos\;\left({N}_g\right)\kern1em \cos\;\left({N}_v\right)\hfill \\ {}\hfill \sin\;\left({N}_v\right)\hfill \end{array}\right]\;. $$(2) -
5.
The position of the control element relative to the CCD array is determined by the three rotation angles:
$$ {\theta}_j={\theta}_{m_j}-{\theta}_{k_j}; $$$$ {\psi}_j={\psi}_{m_j}-{\psi}_{k_j}; $$$$ {\upvarphi}_j= \arctan\;\left[\frac{ \sin\;\left({\upvarphi}_j\right) \sin\;\left({\uptheta}_j\right)- \tan\;\left(\mathrm{c}{\mathrm{y}}_j\right) \cos\;\left({\upvarphi}_j\right)}{ \cos\;\left({\upvarphi}_j\right)+ \tan\;\left(\mathrm{c}{\mathrm{y}}_j\right) \sin\;\left({\upvarphi}_j\right) \sin\;\left({\uptheta}_j\right)}\right]\;. $$(3)Based on (3), the vector of the normal (2) to the mirror 8 is translated into the coordinate system OX m Y m Z m :
$$ {\mathrm{N}}_m={\left({C}_{\upvarphi}{C}_{\uppsi}{C}_{\uptheta}\ \right)}^{\mathrm{T}}{\mathrm{N}}_k, $$(4)where C φ, C ψ, and C θ are rotation matrices relative to the axes Z m , Y m , and X m , respectively.
-
6.
The angles between the star and the optical axis relative to two axes of the plane of projection are determined by means of the coordinates of the star in the CCD array, the coordinates of the optical axis and the scale factor in each frame:
$$ s{y}_j = \left(Oy{p}_j\hbox{--} sy{p}_j\right)p; $$$$ s{z}_j = \left(Oz{p}_j\hbox{--} sz{p}_j\right)p. $$ -
7.
The action matrix of the plane mirror [7] constructed on the basis of the vector of the normal (4) to the mirror (8) is used:
$$ \mathbf{M}=\left[\begin{array}{ccc}\hfill 1-2{N}_{m_1}^2\hfill & \hfill -2{N}_{m_1}{N}_{m_2}\hfill & \hfill -2{N}_{m_1}{N}_{m_3}\hfill \\ {}\hfill -2{N}_{m_1}{N}_{m_2}\hfill & \hfill 1-2{N}_{m_2}^2\hfill & \hfill -2{N}_{m_2}{N}_{m_3}\hfill \\ {}\hfill -2{N}_{m_1}{N}_{m_3}\hfill & \hfill -2{N}_{m_2}{N}_{m_3}\hfill & \hfill 1-2{N}_{m_3}^2\hfill \end{array}\right], $$where N m1, …, N m3 are the corresponding elements of the vector N m.
-
8.
The angles between the star and the optical axis is translated from the plane of projection to the plane of the CCD array:
$$ \mathrm{M}\;\left[\begin{array}{c}\hfill - \cos {\upalpha}_j\kern0.5em \cos {\upbeta}_j\hfill \\ {}\hfill \sin {\upalpha}_j\kern0.5em \cos {\upbeta}_j\hfill \\ {}\hfill - \sin {\upbeta}_j\hfill \end{array}\right]=\left[\begin{array}{c}\hfill -1/\mathrm{Z}\hfill \\ {}\hfill \tan\;\left(s{x}_j\right)/\mathrm{Z}\hfill \\ {}\hfill \tan\;\left(s{z}_j\right)/\mathrm{Z}\hfill \end{array}\right], $$where Z = [1 + tan2(sx j ) + tan2(sz j )]1/2 and α j and β j are the horizontal and vertical components of the angle between the star and the optical axis, respectively.
-
9.
The angle between the normal to the mirror 9 and the star in the coordinate system OX m Y m Z m is defined as δ j = α j – cy j . The value of the angle δ j in the coordinate system bound with the horizon is calculated on the basis of the angles of inclination of the CCD array relative to the horizon from the formula
$$ {\upgamma}_j= \arctan\;\left[\frac{ \sin\;\left({\upvarphi}_{m_j}\right) \sin\;\left({\theta}_{m_j}\right)- \tan\;\left({\updelta}_j\right) \cos\;\left({\theta}_{m_j}\right)}{ \cos\;\left({\upvarphi}_{m_j}\right)}\right]\;. $$ -
10.
The apparent azimuth of the star at the moment the frame is recorded for the coordinates of the point of location of the astronomical sight is determined by means of special software. Using these data and the horizontal angle between the normal to the mirror 9 and the star γ j in each frame, the astronomical azimuth of the normal to the mirror 9 is calculated thus: A j = A v.s.j + γ j .
-
11.
Statistical processing is performed, as a result of which the average value of the astronomical azimuth is computed from n frames [8].
Analysis of Precision of Astronomical Azimuth Determined by Automatic System. A rigorous determination of the precision characteristics of the automatic system of determining astronomical azimuth is impossible due to problems of metrological assurance. This is related to the absence of astronomical measuring instruments with standard deviation of the astronomical azimuth not greater than 0.2″ that could be used as calibrating measuring instruments.
An analysis of the precision with which the astronomical azimuth is found was conducted from the results of the following tests:
-
1.
A determination of the standard deviation of a measurement of angles in a regime of transmission of direction to an external control element. These tests were carried out with the use of a digital autocollimator with limit of error 0.5″ as a standard angle meter and standard deviation of the automatic system of determining astronomical azimuth in the regime of transmission of direction to an external control element of 0.3″.
-
2.
A determination of the standard deviation of the astronomical azimuth from the internal convergence of measurements. From the results of tests it was established that the standard deviation of a measurement of astronomical azimuth in a single measurement regime (3600 measurement frames) is in the range 0.27–0.65″ while the standard deviation of a measurement of astronomical azimuth from the internal convergence of measurement regimes performed on different dates amounts to 0.67″.
-
3.
A comparison of the results of measurements of the automatic system of determining astronomical azimuth and the DKM-3A astronomical theodolite, which has a standard deviation in the determination of azimuth of 1.0″. The maximal value of the difference (with respect to modulus) of the results of these measurements amounted to 2.6″.
An appropriate model of the errors of this measurement system is needed to realize widespread application of the present automatic system of determining astronomical azimuth. Such a model may be created only from the results of specialized studies that take into account not only the instrumental errors of the automatic system of determining astronomical azimuth, but also the possible instability of the foundation on which it rests. For this purpose a stand for investigating the errors of the automatic system of determining astronomical azimuth has been created at the Institute of Engineering Physics. It is planned to try out the new testing techniques on the bench and to also carry out analyses of the errors of the device.
Conclusion. Results from a study of a newly designed high-precision system for determining astronomical azimuth were presented in the article. Differences between the proposed structural circuit of the article from existing systems as well as the basic stages of the calculation of astronomical azimuth were set forth. Results of an estimation of precision were presented along with an analysis of precision. Conclusions as to the need for an in-depth analysis of the errors of the present automatic system for the determination of astronomical azimuth were presented.
References
V. V. Turukina, “An analysis of methods of determining astronomical azimuth by an electro-optical astronomical sight,” Navigation and Management of Motion: Proc. 11th Conf. Young Scientists of St. Petersburg, GNTs RF TsNII Electropribor, St. Petersburg (2009), pp. 313–320.
E. G. Gienko, Astrometry and Geodetic Astronomy: Textbook, SGGA, Novosibirsk (2011).
S. N. Blazhko, Course in Applied Astronomy, Nauka (1979).
Handbook on Astronomical Calculations: Geodetic and Cartographic Instructions, Standards, and Rules, Nedra, Moscow (1984).
Handbook on Astronomical and Geodetic Studies in Topogeodetic Support of Military Forces. Part 2. Astronomical and Gravimetric Studies, VTS, Moscow (1982).
G. I. Pinigin and O. E. Shornikov, “Axial meridian circles,” Astronometr. Astrofiz., No. 49 (1983).
G. V. Pogarev and N. G. Kiselev, Optical Alignment Problems: Handbook, Mashinostroenie, Leningrad (1989).
S. G. Rabinovich, Errors in Measurements, Energiya, Leningrad (1978).
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Metrologiya, No. 1, pp. 11–20, January–March, 2015.
Rights and permissions
About this article

Cite this article
Gaivoronskii, S.V., Berkovich, S.B., Kotov, N.I. et al. An Automatic System for Determining Astronomical Azimuth. Meas Tech 58, 280–285 (2015). https://doi.org/10.1007/s11018-015-0700-8
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11018-015-0700-8