
The development and experimental studies of a new gravimetric sensor intended for use in the mobile Chekan gravimeters are discussed. The design of the gravimetric sensor and its major components are described. Data from calibration and tests of the gravimeter in a climate chamber are analyzed. The experimental data show that the instrumental error of this gravimetric sensor is significantly lower than that of its earlier analog.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
The mobile gravimeter Chekan-AM was developed at the firm TsNII Elektropribor in 2001 and is now in widespread use by Russian and foreign geophysical companies for marine and airborne gravimetry in the search for oil and gas formations [1–3]. During operation of Chekan-AM systems it has been found that the ultimate quality of a gravimetric scan is influenced significantly by the accuracy of the gravimetric sensor which, in turn, depends on a number of factors: ambient temperature variations, the stability and drift of the zero-point, the degree of damping of the sensor element, the accuracy with which the data are gathered, etc.
During the development of a new mobile gravimeter in the Chekan series, considerable effort has been put into reducing the instrumental error of its gravimetric sensor through the development of a small sized sensor element, as well as updating the opto-electronic transducer and designing a new thermostatic system.
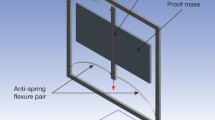
Design of a Gravimetric Sensor with a New Sensor Element. In all the gravimetric systems built at TsNII Elektropribor, the sensor elements have been various modifications of a torsional double quartz elastic gravimetric system developed by the Institute of Earth Physics, Russian Academy of Sciences [4]. The design of the new gravimetric sensor is shown in Fig. 1. The output quantity from the elastic gravimetric system is the angle φ by which the pendulum arm 3 turns, which varies when the acceleration of gravity changes by an amount Δg as
where K is the sensitivity of the elastic system, which can vary over 0.3–1.5 ″/mGal, depending on the torsional rigidity.

The configuration of the gravimetric sensor: 1) fused silica frame; 2) fused silica torsion element; 3) pendulum with test mass; 4) television camera; 5) beam splitter; 6) LED; 7) lens; 8) transparent window in housing; 9) mirror; 10) housing of elastic gravimetric system; 11) damping liquid.
The elastic gravimetric system consists of two torsion systems 2 made of specially pure fused silica contained in a single housing 10. The systems are arranged in the horizontal plane by 180° relative to one another. The housing of the elastic gravimetric system is filled with a organosilicon liquid 11 which serves for damping the system, thermal compensation, and pressure isolation. As a material, fused silica has a number of advantages: workability; obeying Hooke's law all the way to fracture; and a positive thermoelastic coefficient, so that thermal compensation can be carried out by simple design features.
The elastic system of the gravimeter is completely welded and has no control components, so that its reliability is much greater. Because of improvements in the technology for building the elastic gravimetric system, the quartz (silica) systems are very similar in terms of sensitivity and damping. This means that there is essentially no error through cross-coupling from mutual influence of the vertical and horizontal accelerations.
During development of the new elastic gravimetric system its size has been reduced by a factor of 1.5 compared to the elastic gravimetric system used in the Chekan-AM gravimeter. The sizes of the quartz frames, torsion elements, pendula, and other components of the quartz system have been substantially reduced. The range of perturbing accelerations for damping the pendulum oscillations in the new elastic gravimetric system was extended by using polymethyl siloxane fluid with a viscosity of 65 Pa·sec, which is a factor of 3 higher than that of the liquid used in the sensor of the Chekan-AM gravimeter [5].
Data on the angular position of the pendula of the elastic gravimetric system are collected using an opto-electronic converter operating in an autocollimation mode [6–8]. A specialized 5-megapixel black and white CMOS array is used as the photodetector in the opto-electronic converter. In order to reduce the size of the gravimetric sensor the focal distance of the objective in the opto-electronic converter is reduced by a factor of 2, but this did not lead to a reduction in the resolution of the autocollimator since the resolution element (a pixel) of the CMOS array is a third the size of the pixels in the previously used CCD array.
The crucial feature of the design for the new gravimetric sensor is the placement of the elastic gravimetric system together with the opto-electronic converter in a single thermostat. This makes it possible to reduce the influence of changes in the ambient temperature on the gravimeter readout by many times. Another advantage of the new thermostat design is a substantial reduction in the thermostat temperature for the sensor from 32 to 15°C, which leads to a reduction by several times in the drift of the zero-point in the new gravimeter. In addition, the design for the new elastic gravimetric system and opto-electronic converter are rigidly attached without any additional regulator components for the first time; this greatly simplified the process of assembling and aligning the gravimetric sensor and increased the long-term stability of the position of the sensitivity axis of the gravimeter.
Calibration of the Gravimetric Sensor. The coefficients in the calibration curve for gravimeters are traditionally determined by the incline method [9]. The gravimetric sensor is subjected to a series of inclinations at a fixed angle and its steady-state readouts are recorded. The inclination angle is measured with an accuracy of better than 2″ and the data are used to calculate the projection of the acceleration of gravity on the sensitivity axis of the gravimetric sensor. Then a least squares method is used to determine the coefficients b and a of the gravimeter calibration curve, which gives the dependence of the gravimeter readouts ∆g in mGal on the number of counts m in pixels:
The scale factors for each of the fused silica systems of the elastic gravimetric system were determined during the calibration: b 1 = 6.346548 mGal/pixel and b 2 = 6.402359 mGal/pixel. The coefficients were calculated with a coefficient for the squared term of a = 75.04 nGal/pixel2. Thus, the sensitivity of the fused silica systems differed by less than 0.5%.
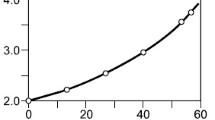
Figure 2 is a plot of the residual error δg owing to the nonlinearity of the calibration curve for the gravimetric sensor for measurements in the range Δa from 0 to –4000 mGal in two series of tilts. The limiting error does not exceed 0.3 mGal. The error that depends on the nonlinearity of the calibration curve has been reduced by roughly a factor of 1.5 compared to that of the Chekan-AM gravimeter and is highly reproducible for all inclination angles. This, however, is most likely explained by the improvements in the calibration technique because of the use of an Acutronic AC3367-TCC high precision triaxial rotatable stand, rather than by the new gravimetric sensor design.

A plot of the residual error owing to the nonlinearity of the calibration characteristic for the two calibration procedures (1, 2).
Zero-Point Drift of the Gravimeter. Estimates of the drift rate of the zero-point and all subsequent tests were carried out after the gravimetric sensor had been mounted on the gyro-platform. The gravimetric sensor was stabilized continuously in the horizontal plane to within the error in the gyro-vertical.
Based on continuous measurements for 3 months, the zero-point drift rate of the gravimeter was estimated to be C = 0.56 mGal/day.
This preliminary value of the drift rate is a factor of 5–7 lower than for the sensors of the Chekan-AM gravimeter. The drift is reduced significantly because of the reduction in thermostat temperature of the elastic gravimetric system to 15°C. Many years of experience with quartz gravimeters shows that the zero-point drift gradually decreases over the first three years by a factor of 2–3. Thus, we can assume that the zero-point drift will decrease further to a level of 5–10 mGal/month, which is close to the zero-point drift of the La Coste gravimeter.
Effect of Changes in Ambient Temperature. Instability of the temperature of the quartz sensor element of a gravimeter has a great influence on the accuracy of the measurements. The static temperature coefficient for quartz systems immersed in a damping liquid is usually 3–5 mGal/°C.
Figure 3 shows the readout Δg of the gravimeter in the thermal chamber as the ambient temperature is varied over the entire working range from +5 to +35°C. This graph shows that changing the temperature by 5°C leads to a transient with an amplitude of up to 1 mGal that lasts about 4 hours. The duration of the transient in the new gravimetric sensor is comparable to that in the Chekan-AM gravimeter, but its amplitude is several times smaller. In addition, under steady-state conditions there is essentially no systematic component in the gravimeter readout error owing to changes in temperature; this is of fundamental importance in aerogravimetric measurements, where the diurnal variations in the ambient temperature can reach tens of degrees.

Output of the gravimeter in a thermostated vessel.
Experimental Estimate of the Sensitivity of the Gravimetric Sensor. The sensitivity of the gravimeter was determined experimentally on a Normal-3S vertical displacement stand. This stand consists of a platform that moves vertically with the instrumentation mounted on it. It is equipped with an optical system for recording the position of the platform to within 1 mm. The platform can be set to oscillate with an amplitude of up to 2 m and a range of periods from 14 to 200 sec. This stand is usually used to test the gravimeter parameters during calibration with dynamic amplitude perturbations of up to 40 Gal.
An additional method in which measurements were made with the platform in a fixed position at different levels was used for estimating the sensitivity of the gravimetric sensor. A series of measurements was made with changes in the level of 0.5 m within a range of ±2 m, i.e., a change in the input signal for the gravimeter by 0.15 mGal was specified within a range of ±0.6 mGal.
The increment in the acceleration of gravity Δg H as a function of the change in the level H was calculated using the formula Δg H = –0.3086ΔH.
The discrepancies between the gravimeter readings and the calculated increments of the elastic gravimetric system were calculated as
where Δg c is the increment in the gravimeter readouts as the level H is varied.
The results of the measurements are given in the table.
These data show that the mean square deviation did not exceed 0.03 mGal. This confirms that the sensitivity of the new gravimetric sensor is comparable to that of earthbound gravimeters and does not place limits on marine and airborne operation.
The sensitivity of the gravimetric sensor was also determined experimentally by comparing the gravimeter readings on a fixed base with data on the changes in the acceleration of gravity owing to the action of lunar and solar tides.
The results of this comparison are shown in Fig. 4. The amplitude of the diurnal variations in the acceleration of gravity is 0.015–0.05 mGal. These data reveal a high degree of correlation between the gravimeter readings and the calculated tidal data. The mean square difference between the gravimeter readouts and the calculations over a 6 day period did not exceed 0.02 mGal.

Comparison of the gravimeter readouts (2) with the calculated tidal values (1)
Conclusion. The firm TsNII Elektropribor together with the Institute of Earth Physics of the Russian Academy of Sciences has developed a new gravimetric sensor for use in the Chekan series of mobile gravimeters. The design of the gravimetric sensor has been substantially modernized through the development of a small sized elastic gravimetric system, a new opto-electronic converter based on a CMOS array, and a thermostatic system for the elastic gravimetric system. Comprehensive testing of the gravimetric sensor on a test stand shows that its instrumental error is significantly lower than that of the previous analog. The effect of the ambient temperature on the gravimeter readouts has been substantially reduced, the zero-point drift is lower, and the dynamic range of the measurements is greater. Using the new gravimetric sensor in the Chekan series of gravimeters will enhance both the accuracy and the spatial resolution of marine and airborne gravimetric scans.
References
A. A. Krasnov et al., “Integrated marine gravimetric system. Development and operation results,” Gyrosc. Navig., 2, No. 2, 75–81 (2011).
A. A. Krasnov and A. V. Sokolov, “A study of the gravitational field of hard-to-reach regions of the earth using a Chekan-AM mobile gravimeter,” Tr. Inst. Prikladnoi Astronomii RAN, No. 20, 353–183 (2009).
A. A. Krasnov, A. V. Sokolov, and S. V. Usov, “Modern equipment and methods for gravity investigation in hard-to-reach regions,” Gyrosc. Navig., 2, No. 3, 178–183 (2011).
L. K. Zheleznyak and E. I. Popov, A New Elastic System for Marine Gravimeters, Gravity-Inertial Apparatus in Geophysical Research, IFZ AN SSSR, Moscow (1988).
L. K. Zheleznyak, A. A. Krasnov, and A. V. Sokolov, “Effect of inertial accelerations on the accuracy of the Chekan-AM gravimeter,” Fiz. Zemli, No. 7, 29–32 (2010).
I. G. Bronshtein et al., Patent No. 2171481 S1 RF, “Quartz gravimeter,” Izobret. Polezn. Modeli, No. 21 (2001).
L. S. Elinson et al., Patent No. 2198414 RF, “Apparatus and method for measuring the acceleration of gravity,” Izobret. Polezn. Modeli, No. 41 (2003).
A. V. Sokolov, I. M. Starosel'tseva, and L. S. Elinson, Patent No. 2377611 RF, “Apparatus for measuring the acceleration of gravity,” Izobret. Polezn. Modeli, No. 36 (2009).
L. K. Zheleznyak and L. S. Elinson, “Aspects of calibrating gravimeters with two elastic torsional systems,” Physical-Technical Gravimetry (1982), pp. 110–124.
This work was supported by the Russian Science Foundation (Project No. 14-29-00160).
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Izmeritel'naya Tekhnika, No. 9, pp. 12–15, September, 2014.
Rights and permissions
About this article

Cite this article
Krasnov, A.A., Sokolov, A.V., Evstifeev, M.I. et al. A New Generation of Gravimetric Sensors. Meas Tech 57, 967–972 (2014). https://doi.org/10.1007/s11018-014-0567-0
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11018-014-0567-0