
Abstract
The establishment of multibeam echosounders (MBES) as a mainstream tool in ocean mapping has facilitated integrative approaches towards nautical charting, benthic habitat mapping, and seafloor geotechnical surveys. The bathymetric and backscatter information generated by MBES enables marine scientists to present highly accurate bathymetric data with a spatial resolution closely matching that of terrestrial mapping, and can generate customized thematic seafloor maps to meet multiple ocean management needs. However, when a variety of MBES systems are used, the creation of objective habitat maps can be hindered by the lack of backscatter calibration, due for example, to system-specific settings, yielding relative rather than absolute values. Here, we describe an approach using object-based image analysis to combine 4 non-overlapping and uncalibrated (backscatter) MBES coverages to form a seamless habitat map on St. Anns Bank (Atlantic Canada), a marine protected area hosting a diversity of benthic habitats. The benthoscape map was produced by analysing each coverage independently with supervised classification (k-nearest neighbor) of image-objects based on a common suite of 7 benthoscapes (determined with 4214 ground-truthing photographs at 61 stations, and characterized with backscatter, bathymetry, and bathymetric position index). Manual re-classification based on uncertainty in membership values to individual classes—especially at the boundaries between coverages—was used to build the final benthoscape map. Given the costs and scarcity of MBES surveys in offshore marine ecosystems—particularly in large ecosystems in need of adequate conservation strategies, such as in Canadian waters—developing approaches to synthesize multiple datasets to meet management needs is warranted.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Marine benthic habitat mapping aims to identify homogeneous and typically discrete regions of the seafloor based on biophysical characteristics, such as topography, sediment types, and the presence of biological structures (Roff et al. 2003; Brown et al. 2011). This approach relies on continuous environmental data, which are now commonly available with the development of acoustic remote sensing technologies—e.g. sidescan sonars and multibeam echosounders (Kenny et al. 2003)—collecting information on the geomorphological features and reflectivity (backscatter) of the seafloor, sometimes at very fine scales (<1 m) over broad areas. Benthic habitat maps are increasingly used in marine spatial planning, since they facilitate the management of marine resources (Pickrill and Todd 2003; Brown et al. 2012), and the development of conservation strategies (Jordan et al. 2005; Copeland et al. 2013; Neves et al. 2014; Young and Carr 2015).
Backscatter intensity is most commonly collected using multibeam echosounders (MBES), the latter being most commonly used to build habitat maps covering wide portions of the seafloor. With swath systems, backscatter intensity depends on the characteristics of the seabed and on the grazing angle of the beams. However, calculating the target strength (backscatter) of the seafloor from swath acoustic systems, is complex (Lurton and Lamarche 2015). The measured strength of the acoustic reflectivity of the target (i.e. seafloor) is a combination of many factors, including but not limited to: operating frequency and pulse length of the system; ensonification geometry; signal attenuation through the water column; and interaction of the sound wave with the sediment over the footprint of the ensonified area (sediment interface and volume scattering). Many of these variables are unknown at the time of survey. Performing radiometric and geometric corrections to generate corrected backscatter mosaics for use in down-stream habitat mapping studies therefore involves a number of assumptions. Complicating matters, there are no standards for sonar manufacturers and post processing software providers for recording and performing corrections on the backscatter values (see Lurton and Lamarche 2015, for an in depth description of measurement).
Despite these challenges, acoustic backscatter plays a central role in benthic habitat mapping as it correlates with the composition of the seafloor, and sometimes with associated biological attributes (reviewed in Brown et al. 2011), even with imprecise geometric and radiometric corrections. For example, stronger backscatter returns typically indicate a hard substrate or rough seafloor (e.g. bedrock, boulders, cobble, consolidated sand, biogenic reefs), whereas weak backscatter returns typically indicate a soft seafloor (e.g. fine-grain sediment, such as silt, clay, mud) (Collier and Brown 2005; Brown and Collier 2008; McGonigle and Collier 2014), or a smooth seafloor, except at or close to the nadir. There are a large number of published scientific studies demonstrating how expert and statistical interpretation (image processing) methods can use backscatter, often in combination bathymetry and bathymetry-derived variables (e.g. seafloor slope, curvature etc.), to generate useful seafloor maps (e.g. Huvenne et al. 2002; Lucieer and Lamarche 2011; Brown et al. 2012; Lucieer et al. 2013).
Acquisition and processing of backscatter intensity to form backscatter mosaics typically yield relative rather than absolute values of intensity. In contrast to bathymetric measurements, there currently is no consensus on standardizing the reliability of backscatter intensity (measured in decibels) (Lurton and Lamarche 2015). Additionally, field acquisition practices, often optimized for the quality of bathymetric data, can result in non-optimal system changes that impact backscatter measurements (e.g. static and time-varying gains, source levels, and the sensitivity and beam patterns during transmission and reception; Lurton and Lamarche 2015). Independently of the various systems, survey conditions, such as vessel speed, overlap of survey lines (McGonigle et al. 2010), and transmission loss due to the characteristics of the water column (estimated using temperature and salinity profiles) affect raw backscatter intensity and must be corrected. To form the final backscatter mosaic, the ensonified area of the seafloor varying with the beam angle, and the angular response referenced at an arbitrarily-chosen incidence angle are also accounted for. Standardization during the acquisition and processing of backscatter intensity between surveys is currently advocated, but not yet commonly applied. Calibration of backscatter intensity is necessary for measurement accuracy and repeatability of surveys, but this lack of calibration is often neglected despite its impact on backscatter measurements. For robust quantitative analyses, confounding factors (outlined above) must be controlled for, resulting in backscatter intensity being only dependent on system frequency, grazing angle at the seafloor, and characteristics of the seabed. Minimally, a proposed practical solution of backscatter calibration is using reference target areas with tank-calibrated echosounders (i.e. under controlled conditions).A lack of calibrated outputs currently limits the potential use of backscatter intensity collated from multiple non-overlapping acoustic surveys in habitat modelling of marine ecosystems. Although qualitative (and relative) analysis is possible, quantitative (statistical) analysis requires comparable data measured on a similar scale to be meaningful. This affects monitoring surveys (e.g. assessing temporal change in conditions between surveys in a same area), and spatial comparisons of similar habitats in different areas, and within a single area with varying surveys (e.g. Brown et al. 2012). In offshore marine environments, uncalibrated acoustic backscatter datasets are common, and while standardization should be encouraged in future surveys, new approaches must also be developed to maximize the use of previously-acquired legacy datasets.
The objective of this study is to propose, develop and test an approach using benthic habitat mapping principles to build a single seamless map of the distribution of seabed characteristics on an Atlantic Canadian shelf bank based on non-overlapping contiguous MBES surveys acquired over multiple years with different systems. The discussion focuses on presenting details on how to assess the validity of the resulting map, by (1) assessing the accuracy of the habitat classification used, and (2) commenting on the overall confusion between habitat classes in the final map.
Data acquisition and methods
Study area
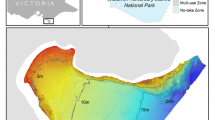
St. Anns Bank is located off the eastern coast of Nova Scotia (Atlantic Canada), with its westernmost boundary lying ~16 km east of Cape Breton, and its easternmost boundary being adjacent to the Laurentian Channel that connects the Gulf of St. Lawrence to the Atlantic Ocean (Fig. 1). The area surveyed in this study includes the bank and areas extending into deeper waters of the Laurentian Channel (depth range of ~20–275 m), with a total surveyed surface area of 2870 km2. Due to the range of bathymetric features present in the area (e.g. bank, ridges), St. Anns Bank is thought to host a diversity of benthic habitats (DFO 2012), which led to its designation as a Marine Protected Area under Canada’s Oceans Act in 2017.

a St. Anns Bank off eastern Nova Scotia (Atlantic Canada). Depth contours are shown in dark grey (100 and 200 m) and light grey (50 and 150 m). The grey box indicates the survey area. b St. Anns Bank within Atlantic Canada
Multibeam echosounder surveys
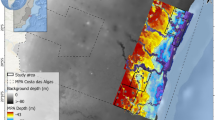
Four acoustic surveys were conducted in the study area using different MBES systems (Fig. 2; Table 1). In 2010, the Canadian Hydrographic Service (CHS) conducted surveys from the CCGS Matthew using a Kongberg EM710 MBES system (70–100 kHz). Additional data were collected by CHS at the site using the same platform and system in 2011. In 2010, CHS also operated two survey launches, the CSL Plover and CSL Pipit, each fitted with a Kongberg EM3002 MBES system (300 kHz), acquiring data over the shallower regions of St. Anns Bank during the same time period as the CCGS Matthew surveys. In 2012, CHS conducted surveys in the western and southern regions of the site from the CCGS Creed using a Kongberg EM1002 MBES system (95 kHz). Finally, a survey was conducted in 2013 under contract to Fisheries and Oceans Canada, by private industry from the M/V Dominion Victory using a pole-mounted Reson 7111 multibeam sonar (100 kHz). Backscatter was recorded from each MBES without conducting or applying any absolute or relative signal calibration (i.e. using the backscatter signal recorded directly by the sonar). Bathymetry and backscatter of each coverage were processed independently with Fledermaus/FMGT using default settings, and rendered as mosaics with a 5-m horizontal grid resolution. For analyses—given our spatial scale of interest in the study area (kms to 10 s of kms)—mosaics were upscaled to a horizontal resolution of 50 m.

Bathymetry (a) and backscatter intensity (b) on St. Anns Bank (Atlantic Canada). Backscatter intensity was mosaicked for the 4 multibeam echosounder systems (EM1002, EM3002, EM710, Reson 7111). Horizontal resolution: 50 m. Also shown are the groundtruthing stations where benthic photographic surveys were performed. Surveys were conducted along transects at 61 stations using drop-camera systems. At most stations (47), linear transects (200–500 m) were performed at an altitude of 1–2 m. Additional opportunistic imagery from Fisheries and Oceans Campod (5 stations) and the Natural Resources Canada Deep Imager (9 stations) was included in the analyses. Details on the camera systems are specified in the text. [WGS84 UTM 21N]
Benthic photographic ground-truthing surveys
Benthic photographic surveys were performed on St. Anns Bank aboard the R/V Strait Signet in November 2013 (33 stations) and aboard the R/V Strait Explorer in September 2014 (14 stations). During both surveys, a drop-camera system equipped with a 10 Megapixel Kongsberg OE14-408 Underwater Digital Stills Camera with integrated lasers (16-cm apart) and video cameras was used. At each station, a linear transect (200–500 m) was performed along the seafloor at an altitude of 1–2 m, yielding between 34 and 110 usable photographs per station. Photographs were taken based on real-time observations through a video feed aboard the ship to capture the variability in seafloor features. No set time or distance was used in the surveys. All photographs were georeferenced by calculating offsets from the surface positioning system.
Additional imagery available in the area from previous surveys was incorporated into analyses. Five stations were included from a 2009 survey aboard the CCGS Hudson using the drop-camera 4KCam (Geological Survey of Canada; 3 stations) and Campod (Fisheries and Oceans Canada; 2 stations). The 4kCam houses a Canon Rebel Eos Ti 12 megapixel camera triggered automatically when the system touches the seafloor. Campod is an instrumented tripod equipped with a downward-facing Nikon D300 12 megapixel camera (Gordon et al. 2007). Nine stations were also included from the 2010 survey aboard the CCGS Matthew using the Natural Resources Canada Deep Imager drop camera system fitted with a Sony 520CX HD video/still camera and lights.
In total, 4214 images from 61 stations were used in analyses (Fig. 2a). Stations were selected to sample bathymetric and backscatter features of interest (i.e. banks, troughs, channels, basins) in the study area.
Benthoscape classification
‘Benthoscapes’—akin to terrestrial landscapes—represent broad bio-physical characteristics of the seafloor, and are characterized by dominant substrate types, the presence of bedforms (e.g. ripples) and/or distinct organisms (Zajac et al. 2003; Brown et al. 2012). In this study, 7 benthoscapes were identified using the groundtruthing images (Table 2; Fig. 3). Identifying the suite of benthoscapes thus relied on features captured at a local scale (images along photographic transects), but represented the breadth of habitats observed on St. Anns Bank, while minimizing the number of benthoscapes for ease of interpretation. Each image was classified with a single benthoscape (characteristics of each benthoscape are listed in Table 2). The 7 benthoscapes were: (A) mud; (Asp) mud with visible seapens; (B) gravelly sand/mud, <50% coverage cobbles/gravel; (C) glacial till—images with mixed sediments of cobbles, gravel and sand. (D) glacial till in the photic zone—images with mixed sediments of cobbles, gravel and sand, with visible coralline algae attached to the hard substrata; (E) gravel with crinoids; (F) sand with dense sand dollars.

Digital images representative of each benthoscape on St. Anns Bank. a mud, Asp: mud with seapens, b gravelly sand/mud; <50% cobbles/gravel, c Till >50% cobbles, gravel, d Till with coralline algae, e gravel with crinoids, f sand with sand dollars
Initial benthoscape mapping using object-based image analysis
Object-based image analysis (OBIA) was used to build a benthoscape map of St. Anns Bank using the software eCognition v9.1. OBIA aims to identify regions of homogeneous spectral features through segmentation of an image, and subsequently assigning distinct classes to the resulting ‘image-objects’ (its use in remote sensing studies is reviewed in Blaschke 2010). The method has been previously applied in benthic habitat mapping as an alternative to the pixel-based classification approach (Lucieer 2008; Lucieer and Lamarche 2011; Lucieer et al. 2013; Diesing et al. 2014).
The OBIA approach was applied on the bathymetry and backscatter intensity data layers at a 50-m pixel resolution of each of the 4 MBES systems (EM710, EM3002, EM1002, Reson 7111) independently, hence initially resulting into 4 non-overlapping benthoscape maps. Segmentation of the acoustic data layers was carried out in eCognition using multiresolution segmentation, a bottom-up segmentation approach where image-objects are merged iteratively to form larger image-objects. In eCognition, merging is based on the homogeneity criterion (or ‘minimized heterogeneity’), which is equally defined with the properties (backscatter intensity and bathymetry in this study) and shape (smoothness and compactness) within and between image-objects. Homogeneity in the properties is based on their standard deviation; therefore, a high properties homogeneity criterion is indicative of high heterogeneity. The relative importance of each layer in determining properties homogeneity during the segmentation process can be adjusted in the software. Given the objectives of the study, backscatter intensity was given twice the weight of the bathymetry to place more emphasis on substrate composition, rather than local variability in depth. Merging occurs when mutual ‘best-fitting’ neighbors do not exceed (jointly) a maximum defined value of the homogeneity criterion (the ‘scale parameter’). Therefore, higher values of the scale parameter allow greater heterogeneity and consequently larger image-objects. In this study, we used a scale parameter of 15, and shape/compactness parameters set to default values (0.1 and 0.5, respectively). Based on visual interpretation, the scale parameter was judged adequate to capture features of interest at the scale of the study, such as delineating areas of hard, mixed and soft sediments (>1 km to 10-km length scale). While derived variables of bathymetry (e.g. aspect, slope, curvature) and backscatter intensity (e.g. texture) can be included as additional layers informing image segmentation in eCognition, we focused on the primary acoustic data layers (e.g. bathymetry and backscatter) to minimize the propagation of uncertainty during segmentation. This approach is also consistent with previous studies utilizing OBIA with acoustic surveys (Lucieer 2008; Lucieer and Lamarche 2011; Lucieer et al. 2013; Diesing et al. 2014; Montereale-Gavazzi et al. 2016). Hence, derived variables were used for classification only (outlined below). The effect of the inclusion of additional (derived) layers in segmentation is outside of the scope of this study.
Classification of image-objects into benthoscapes was performed using a nearest neighbor supervised scheme based on the 7 benthoscape classes. Image-objects acting as ‘samples’ of benthoscape classes were identified when overlapping with ground-truthing images. At most stations (80%), only 1 benthoscape class dominated, while 2 benthoscapes were observed at the remaining stations. In the latter case, neighboring image-objects were selected as samples of each benthoscape (based on different features in the bathymetric and backscatter datasets) to reflect the co-occurrence of the 2 classes. The scale of the mapping unit used in the study (horizontal resolution of 50 m) and the size of the resulting image-objects (average size ranging from 1.2 to 1.6 km2 between coverages, with a common standard deviation of ~1 km2) were thus deemed appropriate to capture the variability of features of interest (>1 km to 10-km length scale), and identify benthoscapes at the scale of the study area.
Properties of image-objects were computed within eCognition and used for classification. The initial feature space included 7 variables: mean and standard deviation of the acoustic data layers (bathymetry and backscatter intensity), as well as means of derived terrain variables (slope, profile curvature, and bathymetric position index with a radius of 500 m). Derived terrain variables were computed using the Benthic Terrain Modeler v3.0 in ArcGIS (Wright et al. 2012). The ‘Feature Space Optimization Tool’ (eCognition) was used to reduce the number of variables used for classification. The tool selects the features (variables) that maximize the average minimum Euclidean distance (standardized to the standard deviations of each variable) between samples of benthoscapes in the feature space. The EM710 coverage (and associated samples) was used to calibrate the feature space, since all 7 benthoscape were observed. The final feature space included 5 variables: mean and standard deviation of acoustic data layers (bathymetry and backscatter intensity), and mean bathymetric position index (with a radius of 500 m).
Each image-object was assigned a ‘membership value’ to each benthoscape class observed within a particular MBES coverage. In eCognition, membership values ([0,1]) relate the distance between the features of individual image-objects, and features of samples, after standardization (thus, allowing features of varying range to be combined during classification). However, unlike ‘fuzzy membership’, the membership values in eCognition are not required to add up to 1. An image-object can thus have high membership values to different classes, if the samples of these classes are in close proximity in the feature space. The minimum membership value was set to 0.1 (default setting in eCognition). Image-objects with membership values lower than this threshold were labelled as ‘unclassified’.
Final benthoscape map of St. Anns Bank
The 4 initial benthoscape maps were combined in the final step of the analysis to produce a single benthoscape map of St. Anns Bank. Manual re-classification was based on (1) high confusion in membership values, defined as image-objects with high membership values to different (usually two) benthoscapes; (2) classification of neighbors, especially for ‘unclassified’ image-objects, (3) continuation of benthoscape across the boundaries of the MBES coverages.
The properties of image-objects in the EM710 coverage (where all benthoscapes were present) of the final benthoscape map were visualized with boxplots to determine the relative role of each of the 5 environmental variables in distinguishing benthoscapes.
Results
Image segmentation of St. Anns Bank
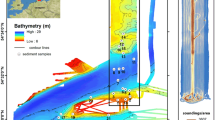
Overall, patterns in image-objects captured bathymetric features and patterns in backscatter intensity on St. Anns Bank (examples are given in Fig. 4). Coherence in the shape and orientation of image-objects at coverage boundaries revealed clear features on the seafloor (Fig. 4a, b). Patterns in the shape of image-objects also overlapped closely with the transition between areas of relatively steep terrain (long, narrow image-objects) and flat terrain (compact image-objects) within coverages with contrasting backscatter intensity (Fig. 4c, d). Sensitivity analysis of the segmentation to the parameters used in eCognition was outside of the scope of this study, but should be undertaken in the future to reveal optimal combinations of parameters based on the research objectives.

Image segmentation performed with eCognition (multiresolution segmentation, scale parameter: 15, shape: 0.1, compactness: 0.5) on St. Anns Bank overlaid on bathymetry and backscatter. Sub-areas shown are examples of (a, b) continuation from 3 MBES coverages (EM710, EM1002, EM3002—boundaries shown with thick lines), and (c, d) features present within the EM710 coverage
Initial benthoscape map of St. Anns Bank
Four benthoscape maps were produced in the initial stage of the analysis (Fig. 5).

Initial benthoscape maps combined from the 4 non-overlapping MBES surveys (outlined in pink). Examples of the effects of edges on the continuation of benthoscapes between MBES coverages is shown in rectangles. [WGS84/UTM 21N]
For each benthoscape map, median image-object membership values were high (range: 0.72–0.91; overall median: 0.84), and overall, 82% of image-objects had membership values higher than 0.60, and 58% above 0.80 (Table 3; Fig. 6). The number of ‘unclassified’ image-objects was overall low (range: 6–48 image-objects) and differed between MBES coverages (Table 3). Clear ‘edge’ effects were observed between the benthoscape maps, in particular between the EM710 and Reson 7111 coverages at the continuation of the ‘Asp’ benthoscape (‘Mud with seapens’) in the northeast portion of the map, since the latter benthoscape had not been ground truthed in the Reson 7111 coverage (Fig. 5). Other such effects were observed in the southern portion of the map at the edge of the EM710 and EM1002 coverages. This region lacked ground-truthing images: for example, only 1 image was labelled as ‘A’ (Mud) in the EM3002 coverage, despite its obvious continuation from the adjacent coverage.

Boxplots of membership values from the initial classification of 4 MBES surveys on St. Anns Bank. Outliers are shown with ‘x’, and the overall median is represented as the dashed line. ‘Unclassified’ image-objects are not included
Clusters of low membership values of assigned classes (i.e. <0.50) were observed predominantly in 3 areas (Fig. 7a). Two of these areas were located at the edge of MBES coverages. The third area was located in the Reson 7111 coverage, which may be the results of (1) the influence of a large block of unclassified image-objects in the Reson 7111 coverage, and proximity of the EM710 coverage, and (2) the relatively fewer ground-truthing samples available in this coverage (n = 3). In contrast, confusion in the classification of image-objects—defined as high membership values to more than 1 benthoscape—was observed within MBES coverages, mostly in the central portion of the benthoscape map (EM710 coverage), predominantly in areas of confusion between benthoscape ‘C’ (Till >50% cobbles/gravel), ‘D’ (Till with coralline algae), and B’(Gravelly sand/mud) (Fig. 7b). In other areas, confusion often occurred at the boundary of the 2 distinct benthoscapes, such as in the eastern portion of the map when transitioning from ‘Mud’ (‘A’) to ‘Mud with seapens’ (‘Asp’) (Fig. 7b). These 2 maps (Fig. 7) were used—aided by author interpretation—to guide the manual re-classification of image-objects in the benthoscape map to produce the final benthoscape map.

Summary of confusion based on membership values in the initial benthoscape map. a Membership value of the assigned class. b Difference between the membership value of the assigned class (in image-objects with values >0.80) and second highest membership value. Outlines of the individual MBES coverages are shown
Final benthoscape map of St. Anns Bank
Manual re-classification was performed on 667 image-objects (30.4% of the total amount of image-objects in the initial map), 87 of these were previously ‘unclassified’. Changes considered possible alternatives in image-objects with low membership values, and when high confusion was detected (i.e. similar membership values to multiple benthoscapes). Author interpretation of the acoustic data layers also supported the final classification of image-objects when obvious mis-classification had occurred, and where features had been poorly sampled. Changes from the initial classification to final classification are summarized in Table 4. The benthoscape classes ‘A’ (Mud), ‘D’ (Till with coralline algae), and ‘C’ (Till >50% gravel/cobbles) remained relatively unaltered (91, 93, and 95% of image-objects, respectively remained in the same class). Proportionally, image-objects of the least common benthoscapes ‘E’ (Gravel with crinoids’) and ‘F’ (Sand with sand dollars) were changed most (30% and 18%, respectively). This is expected since few samples of these classes were available. The benthoscape ‘B’ (Gravelly sand/mud) proved difficult to distinguish statistically from the other benthoscapes: image-objects originally classified as such were manually re-classified in 21% of the cases to all other benthoscapes, with the exception of ‘E’ (Gravel with crinoids).
The final benthoscape map of St.Anns Bank showed a dominance of hard substrate (pebbles, cobbles and gravel) and mixed sediment. Till (>50% cobbles and gravel) and Till with coralline algae composed ~52% of the benthoscape map, while mud covered 29% of the map (Fig. 8). In contrast, some benthoscapes were considered rare: the benthoscape ‘gravel with crinoids’ only occurred over 1% of the surface area, while ‘sand with sand dollars’ occurred over 2% of the surface area.

Final benthoscape map of St. Anns Bank collating bathymetry and backscatter intensity of 4 non-overlapping coverages performed with different MBES systems. [WGS84/UTM 21N]
Relative role of environmental variables
The means of the acoustic data layers (bathymetry, backscatter intensity) were the most important environmental variables distinguishing the benthoscapes (Figs. 9, 10). Some benthoscapes had a narrow environmental range: ‘Asp’ (Mud with seapens) was restricted to deeper depths with very low backscatter intensity, while the opposite was true for ‘D’ (Till with coralline algae) and ‘E’ (Gravel with crinoids), which were observed in shallow waters only, coupled with high backscatter intensity (Fig. 9a, b). Bathymetric variability was apparent in benthoscape ‘C’ (Till >50% cobbles/gravel), both between image-objects (Fig. 9a, e) and within image-objects (Fig. 9c). While mean backscatter intensity was constant in ‘C’ (Fig. 9b), some image-objects showed high internal variability (Fig. 9d). Variability in all variables was high for the benthoscape ‘A’ (Mud). Some variables had a narrow range of values within benthoscapes (mean depth, standard deviation of depth, mean bathymetric position index), but numerous clear outliers were detected (Fig. 9a, c, e). Alternatively, a wide range of backscatter intensity values (mean and standard deviation) were observed within benthoscapes (Fig. 9b, d). The benthoscape ‘F’ (Sand with sand dollars) was observed on shallow, flat areas, but had a wide range of mean backscatter intensity, and high internal variability within image-objects. Lastly, little variability in mean bathymetric position index was detected between benthoscapes, with the exception of ‘E’, which had greater values than the overall median in the study area (Fig. 9e).

Boxplots of environmental variables used to generate the benthoscape classification (a–e). Values are extracted from the EM710 coverage in the final benthoscape map (total n = 1304; 3 clear outliers were removed). (A) mud (n = 538); (Asp) mud with seapens (n = 75); (B) gravelly sand/mud (n = 207); (C) Till >50% cobbles/gravel (n = 366); (D) Till with coralline algae (n = 91); (E) gravel with crinoids (n = 14); (F) sand with sand dollars (n = 13). Horizontal dashed lines represent overall medians among all benthoscapes

Mean depth and backscatter intensity of image-objects from the EM710 coverage in the final benthoscape map (n = 1304). Each benthoscape class is represented; contour lines for each class indicates high density (i.e. 75% of data points) of the image-objects in the feature space
Benthoscape clusters were described for the first 2 most important environmental variables (mean bathymetry and mean backscatter intensity within image-objects; Fig. 10). The clear separation of ‘Asp’ (Mud with seapens) in relation to other benthoscapes explains the low confusion associated with this benthoscape (Fig. 10; Table 3). In contrast, the broad environmental range of benthoscapes ‘A’ (Mud) and ‘B’ (Gravelly sand/mud) can partially explain confusion with 4 other benthoscapes for the former, and 5 other benthoscapes for the latter (Fig. 10; Table 3). The benthoscapes ‘C’ (Till >50% cobbles/gravel), ‘D’ (Till with coralline algae), and ‘E’ (Gravel with crinoids) almost fully overlapped with ‘B’, suggesting the potential crucial role of the remaining environmental variables in distinguishing these benthoscapes: sporadic high bathymetric variability for ‘C’ (standard deviation of depth), low variability in backscatter intensity for ‘D’ (standard deviation of backscatter intensity), and higher mean bathymetric position index for ‘E’ (Fig. 9).
Discussion
The objective of this study was to combine MBES bathymetry and uncalibrated backscatter acoustic layers from 4 non-overlapping surveys to build a single habitat map on St. Anns Bank. To achieve this, a supervised classification scheme was used on the individual datasets with a common suite of benthic classes (‘benthoscapes’) determined with photographs of the seabed (e.g. Brown et al. 2012). The proposed approach of first classifying each multibeam sonar coverage separately, and then combining the classified results to generate a seamless benthic habitat map was demonstrated to work successfully.
In habitat mapping, supervised classification relies on an adequate initial set of benthoscapes readily distinguishable with acoustic data layers (backscatter, bathymetry), since habitats that are not captured by in-situ ground-truthing data cannot be effectively mapped. On St. Anns Bank, benthoscapes could be discerned reasonably well. Membership values in the initial classification were high, and confusion between benthoscapes was mostly observed between those more similar to each other. The acoustic signatures of some benthoscapes might be too subtle to be captured at the scale of the grid size used in the study (50 m). For example, the presence of coralline algae would likely be difficult to capture with acoustic backscatter data, hence explaining why the benthoscapes ‘C’ (Till >50% cobbles/gravel) and ‘D’ (Till with coralline algae) were best differentiated by depth, with the latter being mostly found within a narrow range of shallower depths than ‘C’. Similarly, the acoustic signature of mixed sediment is difficult to identify (Diesing et al. 2014; Calvert et al. 2015). The relationship between acoustic backscatter and sediment particle grain size has been demonstrated, but its reliability tends to be diminished at intermediate mean particle grain size associated with intermediate values of backscatter (Collier and Brown 2005; Brown and Collier 2008). Thus, it is not surprising that the acoustic signature of the benthoscape “B” (Gravelly sand/mud; <50% cobbles/gravel) was most often confused with those of benthoscapes A (Mud) and C (Till >50% cobbles/gravel), and most likely reflects a limitation of acoustic data to distinguish between discrete (and arbitrarily-defined) benthoscapes at the grid size used in the study (i.e. 50 m).
Multibeam operating frequency and the ability to discriminate differences in seafloor benthoscape characteristics is another factor requiring careful consideration. Acoustic penetration into the seafloor in regions of soft sediment is dependent on system operating frequency (e.g. Hillman et al. 2017). Signal penetration of lower frequency systems (e.g. EM710, EM1002, Reson 7111) will be greater than for higher frequency systems (e.g. EM3002), and also dependent on specific substrate characteristics (e.g. grain size composition). Comparing (or combining) outputs from the different coverages with different penetration therefore poses challenges. For example, greater penetration from low-frequency systems may enable characterization of sub-surface sediments (e.g. volume scattering, changes in sub-surface grainsize, sediment strata, and presence of infauna and bioturbation, etc.) which would not be possible using higher frequency systems. Similarly, higher-frequency systems will enable better characterization of micro-scale seafloor surface roughness and surface features, with very limited penetration of the signal into the seafloor. The ability to discriminate between the soft sediment classes may therefore change between coverages. Unfortunately there were insufficient ground-truthing data across all regions of the survey area to test this hypothesis. Nonetheless, the proposed approach of classifying the different multisource coverages separately did yield relative comparisons of backscatter strengths that allowed successful delineation of the boundaries of benthoscape classes across the edges of the different MBES coverages.
Concurrently, results from the nearest-neighbor analysis suggested that important benthoscapes had not been omitted in the classification scheme. A cluster of low membership at the boundary of the EM1002 and EM710 coverage in the southern portion of the map indicated more accurately the lack of observations of the benthoscapes ‘A’ (Mud) and ‘B’ (Gravelly sand/mud; <50% cobbles/gravel) in the EM1002 coverage despite their obvious continuation from the adjacent coverage, rather than the presence of an unidentified benthoscape. Similarly, a high density of unclassified image-objects (i.e. with membership values <0.10) was present in the Reson 7111 coverage at the continuation of the benthoscape ‘Asp’ (Mud with seapens), despite again its obvious continuation from the adjacent EM710 coverage at similar depths. The remaining unclassified image-objects were spatially disconnected, which did not suggest a distinct (spatially-coherent) benthoscape that had not been observed in the ground-truthing images. In habitat mapping, uncertainty in hard classification (e.g. fuzzy clustering) has been exploited to determine transition zones between habitat classes (Lucieer and Lucieer 2009; Lucieer and Lamarche 2011; Hogg et al. 2016). In contrast, in the context of this study, uncertainty near boundaries guided the re-classification of image-objects with high uncertainty based on expert interpretation of the most likely benthoscape in the area. Together, these considerations indicate that the initial benthoscape classification scheme was adequate to capture the breadth of habitats in the study area, although the presence of unsampled habitats cannot be entirely ruled out without additional in-situ ground-truthing data.
Object-based image analysis (OBIA) requires an adequate initial image segmentation that captures the features of interest at the given scale under study (reviewed in Blaschke 2010). In studies using acoustic data layers, the original image to be segmented can be formed of backscatter intensity only (Lucieer 2008; Diesing et al. 2014; Montereale-Gavazzi et al. 2016), a combination of the bathymetric and backscatter layers (Lucieer and Lamarche 2011; Lucieer et al. 2013), and bathymetric derivatives only to detect a specific habitat type (i.e. seafloor roughness; Diesing et al. 2014). In this study, bathymetric and backscatter layers were combined to segment the image—with backscatter being assigned twice the weight. The effect of the selection of acoustic layers during segmentation on the final benthoscape map could be studied more thoroughly, since their combination influences our ability to differentiate benthoscapes during classification. Indeed, mean depth and mean acoustic backscatter within image-objects best differentiated the benthoscapes in the EM710 coverage. However, it may not be crucial to include into the segmentation variables that differentiate some (but not all) benthoscapes. This was observed with the rare benthoscape ‘E’ (Gravel with crinoids) that could not easily be distinguished with mean depth and backscatter only, but rather by showing relatively higher mean bathymetric position index, which likely explains the relative importance of this predictor in the final classification, while other bathymetric derivatives (slope, curvature) had not been retained initially as meaningful predictors of benthoscapes. The necessity to include bathymetric derivatives to classify habitats dominated by hard substrate, potentially due to sharp discontinuities in bathymetry (e.g. reef), has been noted in Scottish waters at similar depths (Diesing et al. 2014), and in deeper waters in areas of general steep topography, such as submarine canyons (e.g. Ismail et al. 2015). Therefore, it is important to recognize that in areas with a wide diversity of benthoscapes (e.g. large swaths of continental shelves), a more flexible statistical modelling approach allowing the use of thresholds and/or non-linear relationships along environmental gradients may be warranted to potentially detect benthoscapes occurring sporadically (e.g. classification trees; Stephens and Diesing 2014). In addition to the layers forming the original image, how the final benthoscape map is influenced by the different parameters of the eCognition multi-scale segmentation algorithm needs to be assessed, for example by determining the scale parameter more objectively (e.g. Dragut et al. 2010; Ming et al. 2015).
In this study, image segmentation itself facilitated the manual re-classification of image-objects to produce the final benthoscape map. In addition to the uncertainty present near the edges of the different coverages, the distribution and shape of image-objects themselves proved useful in detecting continuation of features along boundaries, and guide the overall interpretation of the map. For example, a cluster of long and narrow image-objects at the eastern boundary of the map classified as benthoscape “Asp” in the EM710 coverage continued into the adjacent Reson 7111 coverage, thus allowing its classification (Fig. 5). In the end, the use of image-objects as primary units made the manual re-classification of misclassified image-objects much easier. When combining multiple datasets, the approach suggested in this study optimizes the objective delineation of benthoscape boundaries, but it is recognized that expert interpretation may be needed to correct for obvious mistakes, especially near the edges of individual coverages to build a single seamless map. In this context, the use of OBIA is justified, and in terms of allowing manual re-classification, arguably easier to implement than a pixel-based approach.
An important limitation of the approach is that, due to lack of in-situ ground-truthing data within coverages, the accuracy of the map could not be assessed independently. Despite the broad coverage of the ground-truthing stations, and the large amount of photographs, the ground-truthing data within coverage was often limited. Most ground-truthing stations displayed 1 benthoscape per station, thus the effective sample size was the amount of stations per coverage. In some cases, a benthoscape was observed only once within a coverage (e.g. benthoscape ‘A’ in the EM1002 coverage). This limited the ability to segregate the dataset into training and validating datasets. Instead, to assess the overall validity of the map, membership values (and confusion between them) were used, combined with our contention that the suite of benthoscapes used in the study accurately described the range of benthoscapes observed in the area.
Developing approaches to combine uncalibrated acoustic backscatter datasets is justified because of the overall benefits of using acoustic surveys in marine spatial planning (Pickrill and Todd 2003). By providing a baseline of the distribution of benthoscapes within a region, benthoscape (habitat) maps are at the foundation of integrated ocean management (Cogan et al. 2009). However, the acquisition of high-quality information on the seafloor required to build these maps is often constrained by limited resources in large marine ecosystems, such as those found in offshore Canadian waters (Pickrill and Kostylev 2007). In this context, optimizing the usage of non-calibrated acoustic surveys is therefore crucial. We proposed here an approach to combine these acoustic surveys using supervised classification and object-based image analysis to build a single seamless benthoscape map. This semi-automated approach uses objective segmentation and classification within coverages (and associated uncertainty), coupled with expert interpretation to manually re-classify some of the misclassified image-objects. The approach was successfully implemented on St. Anns Bank, and could readily be used in other areas with similar datasets.
References
Blaschke T (2010) Object based image analysis for remote sensing. ISPRS J Photogramm Remote Sens 65:2–16. doi:10.1016/j.isprsjprs.2009.06.004
Brown CJ, Collier JS (2008) Mapping benthic habitat in regions of gradational substrata: an automated approach utilising geophysical, geological, and biological relationships. Estuar Coast Shelf Sci 78:203–214. doi:10.1016/j.ecss.2007.11.026
Brown CJ, Smith SJ, Lawton P, Anderson JT (2011) Benthic habitat mapping: a review of progress towards improved understanding of the spatial ecology of the seafloor using acoustic techniques. Estuar Coast Shelf Sci 92:502–520. doi:10.1016/j.ecss.2011.02.007
Brown CJ, Sameoto JA, Smith SJ (2012) Multiple methods, maps, and management applications: purpose made seafloor maps in support of ocean management. J Sea Res 72:1–13. doi:10.1016/j.seares.2012.04.009
Calvert J, Strong JA, Service M, McGonigle C, Quinn R (2015) An evaluation of supervised and unsupervised classification techniques for marine benthic habitat mapping using multibeam echosounder data. ICES J Mar Sci 72:1498–1513. doi:10.1093/icesjms/fsu223
Cogan CB, Todd BJ, Lawton P, Noji TT (2009) The role of marine habitat mapping in ecosystem-based management. ICES J Mar Sci 66:2033–2042. doi:10.1093/icesjms/fsp214
Collier JS, Brown CJ (2005) Correlation of sidescan backscatter with grain size distribution of surficial seabed sediments. Mar Geol 214:431–449. doi:10.1016/j.margeo.2004.11.011
Copeland A, Edinger E, Devillers R, Bell T, LeBlanc P, Wroblewski J (2013) Marine habitat mapping in support of Marine Protected Area management in a subarctic fjord: Gilbert Bay, Labrador, Canada. J Coast Conserv 17:225–237. doi:10.1007/s11852-011-0172-1
DFO (2012) Conservations Priorities, Objectives, and Ecosystem Assessment Approach for the St. Anns Bank Area of Interest (AOI). DFO Can. Sci. Advis. Sec. Sci. Advis. Rep. 3012/034
Diesing M, Green SL, Stephens D, Lark RM, Stewart HA, Dove D (2014) Mapping seabed sediments: comparison of manual, geostatistical, object-based image analysis and machine learning approaches. Cont Shelf Res 84:107–119. doi:10.1016/j.csr.2014.05.004
Drǎguţ L, Tiede D, Levick SR (2010) ESP: a tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data. Int J Geogr Inf Sci 24:859–871. doi:10.1080/13658810903174803
Gordon DC Jr, McKeown DL, Steeves G, Vass WP, Bentham K, Chin-Yee M (2007) Canadian imaging and sampling technology for studying benthic habitat and biological communities. In: Todd BJ, Greene HG (eds) Mapping the seafloor for habitat characterization: Geological Association of Canada, Special Paper 47, pp 29–37
Hillman J, Lamarche G, Pallentin A, Pecher I, Gorman A, Schneider von Deimling J (2017) Validation of automated supervised segmentation of multibeam backscatter data from the Chatham Rise, New Zealand. Mar Geophys Res. doi:10.1007/s11001-016-9297-9
Hogg OT, Huvenne VA, Griffiths HJ, Dorschel B, Linse K (2016) Landscape mapping at sub-Antarctic South Georgia provides a protocol for underpinning large-scale marine protected areas. Sci Rep 6:33163. doi:10.1038/srep33163
Huvenne VAI, Blondel P, Henriet JP (2002) Textural analyses of sidescan sonar imagery from two mound provinces in the Porcupine Seabight. Mar Geol 189:323–341. doi:10.1016/S0025-3227(02)00420-6
Ismail K, Huvenne VAI, Masson DG (2015) Objective automated classification technique for marine landscape mapping in submarine canyons. Mar Geol 362:17–32. doi:10.1016/j.margeo.2015.01.006
Jordan A, Lawler M, Halley V, Barrett N (2005) Seabed habitat mapping in the Kent Group of islands and its role in marine protected area planning. Aquat Conserv Mar Freshw Ecosyst 15:51–70. doi:10.1002/aqc.657
Kenny AJ, Cato I, Desprez M, Fader G, Schüttenhelm RTE, Side J (2003) An overview of seabed-mapping technologies in the context of marine habitat classification. ICES J Mar Sci 60:411–418. doi:10.1016/S1054-3139(03)00006-7
Lucieer VL (2008) Object-oriented classification of sidescan sonar data for mapping benthic marine habitats. Int J Remote Sens 29:905–921. doi:10.1080/01431160701311309
Lucieer V, Lamarche G (2011) Unsupervised fuzzy classification and object-based image analysis of multibeam data to map deep water substrates, Cook Strait, New Zealand. Cont Shelf Res 31:1236–1247. doi:10.1016/j.csr.2011.04.016
Lucieer V, Lucieer A (2009) Fuzzy clustering for seafloor classification. Mar Geol 264:230–241. doi:10.1016/j.margeo.2009.06.006
Lucieer V, Hill NA, Barrett NS, Nichol S (2013) Do marine substrates “look” and “sound” the same? Supervised classification of multibeam acoustic data using autonomous underwater vehicle images. Estuar Coast Shelf Sci 117:94–106. doi:10.1016/j.ecss.2012.11.001
Lurton X, Lamarche G (eds) (2015) Backscatter measurements by seafloor-mapping sonars. Guidelines and Recommendations. 200p. http://geohab.org/wp-content/uploads/2014/05/BSWG-REPORT-MAY2015.pdf
McGonigle C, Collier JS (2014) Interlinking backscatter, grain size and benthic community structure. Estuar Coast Shelf Sci 147:123–136. doi:10.1016/j.ecss.2014.05.025
McGonigle C, Brown CJ, Quinn R (2010) Operational parameters, data density and benthic ecology: considerations for image-based classification of multibeam backscatter. Mar Geod 33:16–38. doi:10.1080/01490410903530273
Ming D, Li J, Wang J, Zhang M (2015) Scale parameter selection by spatial statistics for GeOBIA: using mean-shift based multi-scale segmentation as an example. ISPRS J Photogramm Remote Sens 106:28–41. doi:10.1016/j.isprsjprs.2015.04.010
Montereale-Gavazzi G, Madricardo F, Janowski L, Kruss A, Blondel P, Sigovini M, Foglini F (2016) Evaluation of seabed mapping methods for fine-scale classification of extremely shallow benthic habitats: application to the Venice Lagoon, Italy. Estuar Coast Shelf Sci 170:45–60. doi:10.1016/j.ecss.2015.12.014
Neves BM, Du Preez C, Edinger E (2014) Mapping coral and sponge habitats on a shelf-depth environment using multibeam sonar and ROV video observations: Learmonth Bank, northern British Columbia, Canada. Deep Res Part II Top Stud Oceanogr 99:169–183. doi:10.1016/j.dsr2.2013.05.026
Pickrill RA, Kostylev VE (2007) Habitat Mapping and National Seafloor Mapping Strategies in Canada. In: Todd BJ, Greene HG (eds) Mapping the seafloor for habitat characterization: Geological Association of Canada, Special Paper 47, pp 483–495
Pickrill RA, Todd BJ (2003) The multiple roles of acoustic mapping in integrated ocean management, Canadian Atlantic continental margin. Ocean Coast Manag 46:601–614. doi:10.1016/S0964-5691(03)00037-1
Roff JC, Taylor ME, Laughren J (2003) Geophysical approaches to the classification, delineation and monitoring of marine habitats and their communities. Aquat Conserv Mar Freshw Ecosyst 13:77–90. doi:10.1002/aqc.525
Stephens D, Diesing M (2014) A comparison of supervised classification methods for the prediction of substrate type using multibeam acoustic and legacy grain-size data. PLoS ONE. doi:10.1371/journal.pone.0093950
Wright DJ, Pendleton M, Boulware J, Walbridge S, Gerlt B, Eslinger D, Sampson D, Huntley E (2012) ArcGIS Benthic Terrain Modeler (BTM), v.3.0, Environmental Systems Research Institute, NOAA Coastal Services Center, Massachusetts Office of Coastal Zone Management. http://esriurl.com/5754
Young M, Carr M (2015) Assessment of habitat representation across a network of marine protected areas with implications for the spatial design of monitoring. PLoS ONE 10:1–24. doi:10.1371/journal.pone.0116200
Zajac RN, Lewis RS, Poppe LJ et al (2003) Responses of infaunal populations to benthoscape structure and the potential importance of transition zones. Limnol Oceanogr 48:829–842. doi:10.2307/3096584
Acknowledgements
The authors would like to thank Derek Fenton, Tanya Koropatnick and other colleagues in the Oceans and Coastal Management Division of Fisheries and Oceans, Canada (DFO) at the Bedford Institute of Oceanography for support and suggestions to this research project. Financial support for the research was through DFO Academic Research Contribution Program entitled Developing Methods for Benthic Habitat Mapping of MPAs in Atlantic Canada (project agreement #F5299-140076), and the NSERC Canadian Healthy Oceans Network and its partners: Department of Fisheries and Oceans Canada and INREST (representing the Port of Sept-Îles and City of Sept-Îles; NETGP 468437-14, Project 1.2.5).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Lacharité, M., Brown, C.J. & Gazzola, V. Multisource multibeam backscatter data: developing a strategy for the production of benthic habitat maps using semi-automated seafloor classification methods. Mar Geophys Res 39, 307–322 (2018). https://doi.org/10.1007/s11001-017-9331-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11001-017-9331-6