
Abstract
A repeated bathymetric survey reveals seafloor displacement between before and after geodynamic events. We evaluated the less-known spatial resolution and estimation error of the seafloor displacement observation from a vessel-based multi-narrow beam bathymetric survey. In this evaluation, bathymetric data from vessel-based and near-seafloor high-resolution autonomous underwater vehicle (AUV)-based surveys in the same area were used. Simulated vessel-based bathymetric “before and after” data of the seafloor displacement were made using AUV-based bathymetric data. The displacement was verified by comparing these simulated data using the analysis conditions that no locational errors of beam sounding points exist, a footprint effect is uniform, depth accuracy is constant in the analysis area, and there are no depth offset between two data. As a result, we found that the smallest vertical seafloor displacement that can be detected occurs when the horizontal extent of the deformation is larger than several times the size of the footprint (area of the narrow sounding beam projected onto the seafloor) of the used vessel’s multi-narrow beam echo sounder, and in the situation that the amplitude of the depth difference is greater than the accuracy of the vessel-based depth measurement (standard deviation of measuring error). When local slopes of the bathymetry are gentler than those of the artificial variation appeared in the depth differences between two data, the horizontal seafloor displacement seems to be difficult to resolve accurately. The local slope of the artificial depth variation is derived from the wavelength and the amplitude which are equivalent to ~1–3 times of the footprint size and the accuracy of the depth measurement, respectively.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Background and motivation
Bathymetry is basic information for any kind of seafloor observation, and therefore vessel-based multi-narrow beam bathymetric surveys are conducted quite often. In recent years, more bathymetric data of the most scientifically-important areas have become available from the previous survey. Therefore, repeated vessel-based bathymetric surveys revealed seafloor changes or displacement related to geodynamics, such as volcanic eruption, collapse of submarine volcanoes, or coseismic displacement of subduction zone earthquakes (e.g. Fox et al. 1992; Fujiwara et al. 2011; Watts et al. 2012). In the rupture zone of the 2011 Tohoku-oki earthquake (Mw 9.0), large seafloor elevation on a regional scale caused by the coseismic displacement was observed. Furthermore, quite large horizontal seafloor displacement caused by the earthquake was estimated (Fujiwara et al. 2011). This coseismic displacement was likely an important factor contributing to the generation of the huge tsunami. Also, upward and downward changes in seafloor elevation on a local scale caused by thrust faulting was evident at the axial seafloor of the Japan trench (Kodaira et al. 2012; Strasser et al. 2013). Although no evidence was reported yet, occurrence of bathymetric change associated with the great earthquake even on a small scale is potential all over the trench slope in the rupture zone, because real-time turbidity current was observed and turbidite deposits were collected from the wide area (e.g. Arai et al. 2013).
To investigate ability to resolve small change in the seafloor, it is important to verify the uncertainty of the data, however, the spatial resolution and estimation error of the seafloor displacement observation from the vessel-based survey are not exactly known. This is because the data comparison is usually done by using a pair of limited-resolution bathymetric data. Water depth degrades the spatial resolution and accuracy of depth measurement from the vessel-based survey.
While on the other hand, a near-seafloor autonomous underwater vehicle (AUV)-based survey enables us to obtain high-resolution bathymetric data. In this paper, we evaluated the spatial resolution and the estimation error of the seafloor displacement observation from vessel-based bathymetric survey. In the evaluation, bathymetric data from vessel-based and AUV-based surveys in the same area were used.
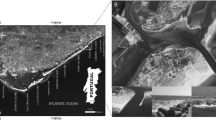
A suitable dataset was collected in the Iheya-north knoll of the Okinawa trough. The knoll is a volcanic complex in a back-arc rifting system (Fig. 1). Since the discovery of hydrothermal activity in 1995 (Momma et al. 1996), many research cruises have been performed for multidisciplinary studies including deep-sea drilling (Integrated Ocean Drilling Program: IODP; Takai et al. 2011). Ordinary and high-resolution bathymetric surveys were conducted as a part of the study.

Regional bathymetry of the Iheya-north knoll. The red square indicates an active hydrothermal and study area. The red circle shows an XBT observation point. The inset shows the location of the Iheya-north knoll in the Okinawa trough (OT) backarc basin (the red star)
Spatial resolution and depth precision accuracy due to water depth
Water depth, which means distance from the vessel’s echo sounder to the seafloor, is one of important factors in determining the spatial resolution and accuracy of the multi-narrow beam bathymetric measurement. The echo-beam spreads into a cone shape toward the seafloor, and an insonified area on the seafloor produces what is known as a ‘footprint’ (Fig. 2). The footprint size becomes large with the increasing water depth. As other factors, the large footprint size is caused by the wide beam width, the large beam angle formed by the vertical line and the outer echo-beam, and also the outward facing local slope angle at the insonified area (e.g. International Hydrographic Organization 2005; Lurton 2010). Measured bathymetry is spatially-smoothed as a function of the footprint, thus the large footprint degrades the spatial resolution. Sounding points (representative location of echo-beam) are distributed sparsely at greater depths associated with the echo-beam spreading, which results in low spatial resolution. The accuracy of depth measurement is known to fall inverse in proportion to the water depth as well.

Schematic illustration of footprints by echo-sounding beams. The footprint size relates to w beam width, b beam angle, s slope angle, D water depth
In contrast, an AUV-based survey enables us to obtain high-resolution and high-accuracy bathymetric data. As a multi-narrow beam echo sounder with high-frequency sound and narrow beam width can be applied to the near-seafloor AUV-based survey, the footprint size is small as well because of the distance from the seafloor.
Bathymetric data collection
AUV Urashima survey
AUV Urashima bathymetric survey was conducted in JAMSTEC YK07-07 cruise aboard the R/V Yokosuka in May 2007 (Yamamoto et al. 2009). The applied multi-narrow beam echo sounder was a SEABAT 7125 [frequency 400 kHz, beam width 1.0° × 0.5° (fore-aft × athwart)]. The AUV survey tracks were aligned in the east–west direction with a spacing of 120 m. Survey altitude was kept to ~70–100 m. Water depth was determined by the sum of the vehicle’s depth and measured values from the AUV. The near-seafloor sound velocity was calculated using measurements from an expendable bathothermograph (XBT). Navigation was achieved by a combination of an inertial navigation system (INS) and super-short baseline positioning (SSBL). The positioning control was not in good condition and more or less 50 m of the positioning error was inferred. Finally, the horizontal positions were corrected to match the morphological features observed on overlapped tracks.
R/V Yokosuka survey
R/V Yokosuka bathymetric survey was performed using a SeaBeam 2112 echo sounder (12 kHz, 2° × 2°) in YK06-09 cruise from 18 to 24 July 2006 (Masaki et al. 2011). The specifications of this echo sounder have been commonly used for deep-sea bathymetric surveys. The vessel passed over the survey area six times, each with a constant speed and obtained bathymetric data (Table 1). One survey track was treated as one’s independent survey in this study. The beam angle was within 40° in the survey area. The XBT measurement for the sound velocity profile in the water column was conducted at 126°53.86′E, 27°44.87′N, ~5 km south of the survey area, on 18 July 2006.
Comparison between AUV and vessel bathymetry
The Generic Mapping Tools (GMT) software (Wessel and Smith 1995) was used in the bathymetric data processing. Sounding points of the AUV Urashima survey were distributed uniformly because of the measurement at nearly constant altitude, and the footprint size was ~1.4 × 0.7–1.8 × 1.1 m. Continuous curvature surface gridding algorithm ‘surface’ (tension: 0.35) and pre-processor filter ‘blockmedian’ were operated for the gridding. The data were gridded at a spacing of 0.05 arc-second (~1.5 m). The data are named ‘Urashima data’.
AUV bathymetry shows hills (the shallowest depth ~870 m) on the western side and basins (the deepest ~1,070 m) on the eastern side (Fig. 3a). The average/median depth is 1,010 m, approximately 1,000 m. Hydrothermal chimney mounds ~30 m in diameter and ~10–20 m in height were found on the hillside around 126°53′45″–50″E, 27°47′24″–30″N in the high-resolution bathymetry. There are somewhat artifacts of small-scale depth discontinuities, with amplitude of ~2–4 m, on the overlapped tracks due to the uncertainties in AUV positioning. Slope angles of 0°–20° are dominant and the mode value is ~10° in the survey area (Fig. 3b, c).

a Swath bathymetry measured by the AUV Urashima’s multi-narrow beam echo sounder, contoured at 2 m. b Slope angle distribution of the AUV bathymetry. The slope angle was calculated after ‘grdfilter’ (width: 100 m) operation. c Histogram of frequency percent of the slope angle
Vessel bathymetry is shown in Fig. 4. Each survey track was treated as an independent survey in this study. The same parameters for the Urashima processing were used for the R/V Yokosuka’s. The grid spacing is finer than the mean spacing of the vessel’s raw soundings, but it can avoid aliasing, thus the grid data can more directly reflect the measurement conditions such as distribution of sounding points and quality of measured values. The footprint size of the vessel-based survey is ~35–43 m at the depth of 1,000 m in ship’s fore-aft direction. The footprint size in athwart ship’s direction is estimated to vary from ~35 to ~80 m in consideration of the beam angle and the local slope. The footprint size of ~35–50 m covers 70 % of the survey area, and the footprint size within 80 m covers 95 % of the area. The maximum beam angle 37° is situated on the westernmost survey area in the July 18th (718) survey (Fig. 4a). Distribution of the sounding points is sparse and non-uniform. The vessel speed causes bathymetry low spatial resolution, especially in the July 24th (724) survey when the vessel went at 16 kt (29.632 km/h) high speed (Fig. 4d).




In the upper figure, red crosses show sounding points of the R/V Yokosuka’s multi-narrow beam survey. The arrow and dashed line show the ship track and the traveling direction. Black ellipses in a are indications of the footprint sizes. The lower figure shows swath bathymetry measured by the vessel-based survey. a Survey on July 18 (718), b first survey on July 23 (723-1), c second survey on July 23 (723-2), and d survey on July 24 (724)
In the vessel bathymetry, geographical features which are smaller than the footprint size, for example, the hydrothermal chimney mounds cannot be recognized (Figs. 3, 4). Seafloor morphology is slightly different from each track survey due to inhomogeneous distribution of sounding points and measuring errors.
The high-resolution AUV bathymetry was assumed to be the “true” bathymetry. The Urashima data were smoothing-filtered by Gaussian type convolution ‘grdfilter’ in consideration of the footprint size. The filter width was examined by comparing filtered AUV-based data with observed vessel-based survey. The filtered data were sampled at sounding points of the vessel-based survey, and then depth differences between the AUV- and the vessel-based data were taken. As the result, when a filter width (that is six times the Gaussian sigma) of 100 m was applied, standard deviations of the depth differences were the smallest. In that case, the standard deviations (1σ) ranged from 2.64 m (723-2 survey) to 2.97 m (724 survey) (Fig. 5). Practically, locational errors in the sounding points are an additional effect on the depth differences. Uncertainties in positioning of the AUV, additionally, errors in water column sound velocity, roll, and pitch motions of the vessel are possible sources of the locational errors. Therefore the accuracy of the vessel-based depth measurement [standard deviation (1σ) of measuring error] is considered to be within ~0.2–0.3 % of water depth (~1,000 m).

Histogram of relative depth difference between AUV Urashima and R/V Yokosuka (723-2) data, the bias value of 6.46 m is removed. The standard deviation (1σ) of the distribution is 2.64 m
Evaluation tests of seafloor displacement detection and estimation
In our evaluation tests, simulated vessel-based bathymetric data, which were created from the AUV-based bathymetric survey, were used. This data were assumed to be “before” the seafloor displacement. Then a variety of locational and convex/concave elevational changes were applied on the AUV-based bathymetric data, which was then treated to produce a simulative data of “after” the seafloor displacement. The displacement was then verified by comparing these “before” and “after” sets of data. Regarding analysis conditions, no locational errors of beam sounding points existed, depth accuracy was constant within the analysis area, and footprint effect was uniform in the analysis area. As the depth values were sampled from the same AUV-data, there was no depth offset between two data.
Estimation of horizontal seafloor displacement
Locations (longitude, latitude) of the Urashima data were shifted uniformly as the simulation of rigid horizontal seafloor displacement. We used the method of Fujiwara et al. (2011) to estimate the horizontal displacement. The evaluation test was performed according to the following procedure.
-
1.
Filtered (Gaussian, width: 100 m) Urashima data values were sampled at sounding points of a Yokosuka survey. Normally-distributed random values (1σ = 3 m) as a simulation of depth accuracy were added to the sampling values. The simulated vessel-based bathymetric data was used as “before” the displacement (Data-1, e.g. Fig. 6a).
Fig. 6 
Simulated vessel-based bathymetric data using the AUV Urashima data. The AUV data are sampled at sounding points of a 718 and b 723-2 surveys, then normally-distributed random values (1σ = 3 m) are added to the sampling values
-
2.
The Urashima data, of which the locations were shifted, were filtered and sampled at sounding points of other Yokosuka survey data. Normally-distributed random values (1σ = 3 m) were added to the sampling values as “after” the displacement vessel-based bathymetric data (Data-2, e.g. Fig. 6b).
-
3.
“After” bathymetry (Data-2) was horizontally shifted to minimize the variance of depth differences from “before” bathymetry (Data-1) (to maximize the cross-correlation of the bathymetry).
-
4.
Horizontal displacement was estimated by the amount of horizontal shift, and dislocation from the given shift showed the error of estimation (Figs. 7, 8).
Fig. 7 
Contours showing standard deviations of depth differences between two data. a The red cross at (−6, −4.5) (×0.00001°) indicates the location of the minimum value. The blue cross at (−5, −5) points the given shifted location. The dislocation from the blue to the red crosses (−1, +0.5) is the error of estimation shown in Fig. 8. b Contours when using a high relief bathymetry model of which relative height was doubled
Fig. 8 
Scatter plot of errors of estimated seafloor horizontal displacements. The sizes of red squares show occurrence frequency. a Comparison between simulated Data-1 using the sounding points of the R/V Yokosuka 718 survey and simulated Data-2 using the sounding points of 723-2 survey. b Comparison between simulated Data-1 and Data-2 using 723-1 and 723-2 surveys
-
5.
The amounts of location shift were varied both in longitude and in latitude, and the procedures from 2 to 4 were repeated. The horizontal shift amount spans ~±4.9 m (±0.00005°) in longitude and ~±5.6 m (±0.00005°) in latitude.



As the result, we found that the estimation error of the seafloor horizontal displacement is 0–3 m (Fig. 8). The distance of error was not dependent on the amount of given location shift. As shown in the contour map showing standard deviations of depth differences between two data of Fig. 7a, there is little difference in value between any points around the location of the minimum value, thus the location of the minimum likely to drift within distance of 0–3 m (for example, inside the 3.5 m contour in Fig. 7a). The pattern of error distribution varied with a pair of Yokosuka surveys (Fig. 8) or a pattern of random values added, though, the error range didn’t change. In trial runs using relatively dense distribution of the sounding points of 718 and 723-2, or dense distribution of 723-1 and 723-2 surveys, the error range didn’t change. However, in trial runs using sparse distribution of the sounding points of 718 and 724 surveys, the error range was doubled. Thus, we found that significant decline in spatial resolution due to the sparse distribution of sounding points causes large estimation error for horizontal displacement.
The estimation error depended on the standard deviation of random values given as the depth accuracy. In cases when no random values were added, the horizontal displacements were accurately determined and the errors were within the range of 0–1 m.
We examined factors of bathymetric relief and steepness of the local slope. High relief bathymetry was emulated from the Urashima data of which relative height from the average depth was magnified up to two times. The average depth is 1,010 m and the same as the original data. Accordingly, the mode of the local slope angles became ~20° and slope angles ranged widely from 0° to larger than 40° (blue line in Fig. 9). The evaluation test was performed according to the same procedure. As shown in Fig. 7b, in trial runs using the high relief bathymetry, values greatly change across the distance and the minimum value is located within a narrow range of the bottom of the contour map (for example, inside the 3.5 m contour in Fig. 7b). Then, the horizontal displacements were accurately estimated, and the error range was within 0–1 m.

Histogram of slope angles. The red, blue, and green lines show slope angle frequency percent of the original AUV bathymetry as shown in Fig. 3c, in addition, high, and low relief bathymetric models, respectively
On the other hand, the evaluation test was also performed using low relief bathymetry. In these models, the relative height was changed down to a half of the original Urashima data, and then the local slope angles <10° were predominant, and the angle’s mode value was ~5° (green line in Fig. 9). In these trial runs, the resultant error range extended up to 10 m, thus this method was no longer effective for the low relief bathymetry and rather monotonous morphology. The result suggests the bathymetric relief and the steepness of the local slope are significant contributing factors.
Detection of vertical seafloor displacement
Convex-concave up/down seafloor elevation was added to the Urashima data as the simulation of vertical seafloor displacement on a local scale (Fig. 10) associated with horizontal seafloor displacement on a regional scale. The detection test was performed according to the following procedure.

a Convex-concave up/down seafloor elevation placed on the hill slope of the study area (Model-A). b Cross-sections of up/down models along a latitude of 27°47′30″N. Model-A’s amplitude of the up/down is ±7 m, horizontal width in the east–west direction is 400 m. Model-B has horizontal extent of 200 m and amplitude of ±3.5 m, Model-C’s dimension is 100 m and ±7 m in horizontal and vertical directions, respectively
-
1.
As shown in the last section, filtered (Gaussian, width: 100 m) Urashima data values were sampled at sounding points of a Yokosuka survey. Normally-distributed random values (1σ = 3 m) as a simulation of depth accuracy were added to the sampling values. The simulated vessel-based bathymetric data was used as “before” the displacement (Data-1).
-
2.
Convex-concave up/down seafloor elevation was added to the Urashima data. In addition, locations (longitude, latitude) of the Urashima data were shifted with uniformly as horizontal displacement occurred concurrently. The filtered displacement data were sampled at sounding points of other Yokosuka survey data. Normally-distributed random values were added to the sampling values as “after” vessel-based bathymetric data (Data-2).
-
3.
Water depth difference between “before” (Data-1) and “after” (Data-2) was taken.
-
4.
The horizontal extent and amplitude of the up/down model were varied, and the procedures from 2 to 3 were repeated.
Artificial variation in the water depth difference beside the given depth difference occurred due to the inhomogeneous distribution of sounding points and the measuring errors (Fig. 11). The “fake” depth difference variation has a wavelength ~50–150 m in the trial run using a pair of dense distribution of the sounding points of 723-1 and 723-2 surveys. Amplitude of the variation shown in Fig. 11 is rather higher than ~3 m. The wavelength and the amplitude are equivalent to ~1–3 times of the footprint size and the standard deviation of the given random values as depth accuracy of this vessel-based survey, though the amplitude of the variation shown in Fig. 11 is rather higher than 3 m because of increasing variance of the depth differences by the added horizontal displacement. Therefore, displacement that can be detected occurs when the horizontal extent of the up/down model is larger than several times the footprint size, threefold is enough, and in the situation that the amplitude of the depth difference is greater than the given depth accuracy (Figs. 11a, b, 12).

Cross-sections along a latitude of 27°47′30″N. Red lines indicate the convex-concave up/down models, a Model-A, b Model-B, and c Model-C. Blue dots are depth differences sampled at 723-2 survey sounding points in the area between 27°47′29″N and 27°47′31″N. Blue lines show depth differences along the latitude of 27°47′30″N. Green lines are filtered depth differences (Gaussian, width: 200 m) to suppress the artificial variation

Color contour figure showing depth differences between two pieces of data, contoured at 0.5 m. Comparison between simulated Data-1 using the sounding points of the R/V Yokosuka 723-1 survey and simulated Data-2 using the sounding points of 723-2 survey. Convex-concave up/down seafloor elevation a Model-A, and b Model-B are added to Data-2. Then Data-2 are shifted the longitude and latitude to 0.00005°, 0.00005° (~4.9, ~5.6 m) to simulate horizontal displacement. The depth difference data are low-pass filtered (Gaussian, width: 200 m)
In Figs. 11, 12, the resultant depth differences were filtered using longer lengths of filter-width to suppress the artificial variation (e.g. green lines in Fig. 11). The result suggests that the vertical seafloor displacement which has long enough length of horizontal extent becomes detectable. In contrast, the vertical displacement in short horizontal extent is difficult to be distinguished from the false variation even in case of greater height difference was given (Fig. 11c).
Discussion
According to the results of this study, the footprint size and the accuracy of the depth measurement are suggested to be important factors for the seafloor displacement observation in the vessel-based bathymetric survey. In consideration of practical survey keeping with adequate survey vessel speed, and thus dense distribution of sounding points, as for the smallest vertical seafloor displacement that can be detected, the criteria of threshold are that the horizontal extent of the deformation is larger than several times the size of the footprint, and in the situation that amplitude of the depth difference is greater than the depth accuracy.
As for the estimation of the horizontal seafloor displacement, slope angles of the artificial depth difference variation may be a contributing factor. The horizontal displacement was difficult to resolve when local slopes of the bathymetry were gentler than those of the artificial variation appeared in the depth differences. The slope angle of the artificial depth variation is derived from the wavelength and the amplitude which are equivalent to ~1–3 times of the footprint size and the accuracy of the depth measurement as shown in the last section. The slope angles of the artificial variation is calculated to be ~5°–10°. By contrast, the horizontal displacement should be accurately estimated in the area where high relief bathymetry has steep slopes and a variety of slope angles. In the case of moderate relief bathymetry, the estimation error depends on the magnitude of accuracy of the depth measurement. In this evaluation test, because slope steepness and variation changed concurrently, we could not figure out which factor is more significant.
To apply to practical seafloor displacement observation, criteria of the depth accuracy and the footprint size are interpreted with reference to water depth as a rough guide. By using a conventional multi-narrow beam echo sounder for deep-sea bathymetric surveys (sound frequency 12 kHz, beam width 2° × 2°), the accuracy is ~0.2–0.3 % of water depth and the footprint size is ~3–5 % of water depth.
Collection of high-accuracy bathymetric data must be considered for the seafloor displacement observation. Use of only the data obtained by inner beams near the nadir of the vessel is preferable to obtain small errors and reliable estimation, because these data have higher accuracy than that of outer beams. And in practical surveys, the data obtained by outer beams is problematic due to magnified local errors in accuracy of the depth values and location of the sounding points caused by effects of errors in water column sound velocity. And moreover, measuring errors due to ship’s rolling motion are severe on outer beams. Therefore in the practical analysis, use of datasets collected along the same track is the best way because it enables a comparison between inner beams with a similar distribution pattern of sounding points as long as possible.
The vessel’s navigation error and the sea surface height variation due to ocean tide, that is a possible error of the depth sounding, must be considered in practical surveys. To rectify the errors in the absolute depth values and location of the sounding points that are not called into account in this study, it is necessary to survey an area thought to have suffered from little change by seafloor displacement, which extends from an area of large displacements. This survey can reduce the apparent offsets considered to be of systematic errors existing in the whole area. The benchmarks are, for example, an off-axis ridge flank for volcanic eruption at the mid-ocean ridge (Fox et al. 1992), the foot of a submarine volcano for growth or collapse of the volcano (Watts et al. 2012), and a seaward trench slope for a subduction zone megathrust earthquake (Fujiwara et al. 2011).
We found that the bathymetric relief and steepness of the local slope are probably significant contributing factors for the horizontal displacement estimation. The evaluation in other areas, where seafloor morphology is different, is essential to constrain how these influence the spatial resolution and the estimation error. To confirm the applicability to scientifically-interesting areas as in mid-ocean ridges, which have an average depth of ~3,000 m or trenches deeper than 5,000 m, the evaluation in areas at greater depths is also needed. For the future, there is room for verification in the modeling methods that are interpolation of gridding to compare different surveys with; random sounding point locations, optimum processing to emulate the footprint effect, and proxy for the measuring error.
Conclusion
In comparison with the AUV bathymetry, geographical features smaller than the footprint size cannot be recognized in the vessel bathymetry. Seafloor morphology is different from each track survey due to the inhomogeneous distribution of sounding points and measuring errors. The difference causes artificial variation in the depth difference, which hampers detection and estimation of the seafloor displacement. The wavelength and the amplitude of the artificial depth variation are equivalent to ~1–3 times of the footprint size and the accuracy of the vessel-based depth measurement, respectively. Thus, the smallest vertical seafloor displacement that can be detected occurs when the horizontal extent of the deformation is larger than several times the footprint size, and in the situation that the amplitude of the depth difference is greater than the depth accuracy.
Significant decline in spatial resolution due to the sparse distribution of sounding points causes large estimation error of horizontal seafloor displacement. When dense distribution of soundings is certified, estimation error of the horizontal displacement depends on the depth accuracy. Probably the bathymetric relief and the steepness of the local slope are significant contributing factors for the estimation of the horizontal seafloor displacement. A possible threshold is the slope angle of the artificial variation appeared in the depth difference. The horizontal displacement may be difficult to resolve when local slopes of the bathymetry are gentler than those of the artificial depth variation.
References
Arai K, Naruse H, Miura R, Kawamura K, Hino R, Ito Y, Inazu D, Yokokawa M, Izumi N, Murayama M, Kasaya T (2013) Tsunami-generated turbidity current of the 2011 Tohoku-Oki earthquake. Geology 41:1195–1198
Fox CG, Chadwick WW Jr, Embley RW (1992) Detection of changes in ridge-crest morphology using repeated multibeam sonar surveys. J Geophys Res 97:11149–11162
Fujiwara T, Kodaira S, No T, Kaiho Y, Takahashi N, Kaneda Y (2011) The 2011 Tohoku-Oki earthquake: displacement reaching the trench axis. Science 334:1240
International Hydrographic Organization (2005) Chapter 3 Depth determination. Manual on hydrography publication M-13, 1st edn. International Hydrographic Bureau, Monaco, pp 119–198
Kodaira S, No T, Nakamura Y, Fujiwara T, Kaiho Y, Miura S, Takahashi N, Kaneda Y, Taira A (2012) Coseismic fault rupture at the trench axis during the 2011 Tohoku-oki earthquake. Nat Geosci 5:646–650
Lurton X (2010) An introduction to underwater acoustics principles and applications, 2nd edn. Springer, UK
Masaki Y, Kinoshita M, Inagaki F, Nakagawa S, Takai K (2011) Possible kilometer-scale hydrothermal circulation within the Iheya-North field, mid-Okinawa Trough, as inferred from heat flow data. JAMSTEC Rep Res Dev 12:1–12
Momma H, Iwase R, Mitsuzawa K, Kaiho Y, Fujiwara Y, Amitani Y, Aoki M (1996) Deep tow survey in Nanseisyoto region (K95-07-NSS). JAMSTEC J Deep Sea Res 12:195–210
Strasser M, Kölling M, dos Santos Ferreira C, Fink HG, Fujiwara T, Henkel S, Ikehara K, Kanamatsu T, Kawamura K, Kodaira S, Römer M, Wefer G, the R/V Sonne Cruise SO219A and JAMSTEC Cruise MR12-E01 scientists (2013) A slump in the trench: tracking the impact of the 2011 Tohoku-Oki earthquake. Geology 41: 935–938
Takai K, Mottl MJ, Nielsen SH, the Expedition 331 Scientists (2011) Proc IODP 331: Tokyo (Integrated Ocean Drilling Program Management International, Inc.) doi: 10.2204/iodp.proc.331.2011
Watts AB, Peirce C, Grevemeyer I, Paulatto M, Stratford W, Bassett D, Hunter JA, Kalnins LM, de Ronde CEJ (2012) Rapid rates of growth and collapse of Monowai submarine volcano in the Kermadec Arc. Nature Geosci 5:510–515
Wessel P, Smith WHF (1995) New version of Generic Mapping Tools released. EOS Trans AGU 76:329
Yamamoto F, Maki T, Hyakudome T, Sawa T, Tsukioka S, Saito F, Ishikawa A, Chiba K (2009) High-resolution bathymetric and geological survey of the Iheya-north knoll, the Okinawa Trough, using AUV Urashima, paper presented at 21st Meeting, Japan Society for Marine Surveys and Technology, Tokyo
Acknowledgments
We thank the officers and crew of R/V Yokosuka and marine technicians of Nippon Marine Enterprises for their outstanding professionalism and dedication. We thank anonymous reviewers for their helpful comments in improving the manuscript. T. Fujiwara’s contributions to this research were supported by the grant of Kochi University for the JAMSTEC/Kochi University joint program. The bathymetric data used in this paper are available at JAMSTEC home page (http://www.godac.jamstec.go.jp/darwin/e) or accessible at JAMSTEC Data Management Group (dmo@jamstec.go.jp).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Fujiwara, T., Masaki, Y. & Yamamoto, F. Evaluation of spatial resolution and estimation error of seafloor displacement observation from vessel-based bathymetric survey by use of AUV-based bathymetric data. Mar Geophys Res 36, 45–60 (2015). https://doi.org/10.1007/s11001-014-9242-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11001-014-9242-8