
Abstract
A new metal foam magneto-rheological (MR) fluid damper is optimized, and the mechanical performance is investigated experimentally. With a magnetic field, MR fluid is extracted from the metal foam and fills up the shear gap to produce the MR effect. The magnetic field density in the shear gap and the structural parameters are taken as the optimization object, and the optimal parameters of the metal foam MR fluid damper are updated. A testing system, including a DC motor with a speed controller, a force sensor with an amplifier and a power supply, is built to investigate the shear force of the metal foam MR fluid damper. The test signals are gathered and processed by a DAQ and a PC with LabVIEW software. A timer is designed to synchronize the start of the magnetic field. The experimental results show that the shear force decreases as the shear rate increases, and for the same shear rate, when the current ranges from 0.5 to 1.0 A, the difference of the shear force in the metal foam MR fluid damper is the most obvious. Additionally, the shear force after optimization clearly increases. When the current increases gradually, the shear force also increases. When the excited current increases from 0.5 to 1.5 A, as the current increases, the shear force increases obviously; however, once the current is above 1.5 A, the increase of the shear force is no longer obvious. In addition, for a shear rate of 2 s−1 and a current of 1.0 A, the shear force of the metal foam MR fluid damper is improved by a factor of 1.46 compared to the value before optimization.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
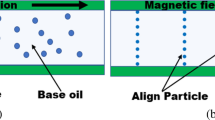
Magneto-rheological (MR) fluid (Rabinow1951), typically consisting of two phases, magnetic particles (3–10 μm) and hydrocarbon, are considered to be one of several intelligent materials. When a magnetic field is applied, a MR fluid will transform from a free fluid into semi-solid states. These states exhibit far superior yield behaviour than other traditional approaches. Interestingly, once the magnetic field is switched off, the fluid will recover to the free flow state, and the transformation is completed within several milliseconds. This makes MR fluids feasible for applications in vehicle suspension (Choi et al. 2002), engineering structures (Lee and Choi 2000), vibration control, and other fields of interest (Gordaninejad et al. 2010; Choi et al. 2002). However, in a traditional MR fluid damper, the working cylinder must be filled with MR fluid. Consequently, these designs require high-quality sealing to prevent leakage of the costly MR fluid. It is believed that the high cost associated with MR fluids compared with passive ones is a barrier to their introduction and use in numerous applications. Carlson (Carlson 1999; Carlson and Sproston 2000) pointed out that the high cost is a key barrier to widespread commercial application of the device and introduced the idea of using a porous sponge as an absorbent matrix to contain the MR fluid for an MR damper. Under the effect of a magnetic field, the MR fluid is extracted from the pores of the sponge to produce the MR effect. The sponge is wrapped around the piston of the damper to avoid MR fluid leaking out of the seals and keep it in position. However, the sponge MR fluid damper also has some shortcomings. These shortcomings include the non-magnetic nature of the sponge, which will reduce the magnetic field strength, and the durability of the sponge used under high shearing conditions. Considering the problems associated with porous sponges for the MR damper presented by Carlson, some researchers (Liu et al. 2010) proposed a Ni metal foam MR fluid damper to replace the sponge. The study combined magnetic field simulations and experiments of the metal foam Ni MR fluid damper and validated the feasibility of using metallic foams to store MR fluid. Liu also examined the mechanical performance (Liu et al. 2015), dynamic response (Yao et al. 2013), and the effect of current and shear rate on the damping force.
Our previous investigation showed that the metal foam MR fluid damper partly has an obvious MR effect; however, the provided shear force is low, which makes further applications difficult. With the motivation of improving the shear performance of a metal foam MR fluid damper, the distribution of the magnetic field density in the shear gap, is optimized by the finite element analysis (FEM) software ANSYS. A metal foam MR fluid damper with optimal parameters is developed, and a test system, including a force sensor, movement control system, data collection system, is built to experimentally investigate the shear performance before and after the optimization.
2 Structure of the metal foam MR fluid damper
A schematic and a photograph of the metal foam MR fluid damper are shown in Fig. 1. The metal foam MR fluid damper mainly consists of the following five components: a working cylinder, a piston with a piston rod, end caps of a cylinder piston rod, metal foam full of MR fluid and a current coil. To ensure that the magnetic field lines travel along the expected route, both end caps of the cylinder are fixed with a piece of 2 mm copper. Once the current is on in the current coil, the magnetic field lines will be produced around the piston, and the magnetic field lines will pass through the working cylinder, the metal foam (filled with MR fluid), the shear gap and the piston. Compared with the traditional MR fluid damper, metal foam is used to store MR fluid, and such a structure is ideal for holding MR fluid and preventing any leakage. In addition, due to its small average pore size, metal foam uses the capillary effect to spread the MR fluid inside and retain it without leakage, as show in Fig. 1. No sealing structure is needed in the metal foam MR fluid damper; for details of the metal foam MR fluid damper refer to our previous investigation (Liu et al. 2010, 2015; Yao et al. 2013). This approach not only reduces the leakage but also reduces the amount of MR fluid, decreasing the cost.

Metal foam MR fluid damper
Here, 1 and 7 are the end caps of the cylinder piston rod, 2 is the gap, 3 is the cylinder, 4 is the metal foam, 5 is the coil, 6 is the piston, and 8 and 9 are bronze pieces.
3 Optimization of the metal foam MR fluid damper
3.1 The progress of parameter optimization
In this paper, the parameters of the metal foam MR fluid damper are optimized. As one of the key factors, the magnetic flux density in the working gap is taken as the optimization objective, and the working effective length (L), diameter of the piston (D) and thickness of the working cylinder (t) as optimization variables, where the constraint conditions of the variables are the followings: 10 mm ≦ L ≦ 30 mm, 30 mm ≦ D ≦ 50 mm, and 6 mm ≦ t ≦ 16 mm. The structural parameters of the metal foam MR fluid damper after optimization can be obtained.
In Fig. 2, the points marked in green are the optimal solution of the structural parameters. According to the distribution of the points, the most suitable parameters of the metal foam MR fluid damper are as the followings: L = 25 mm, D = 42 mm, t = 11 mm; that is, after optimization, the effective length of the piston is 25 mm, the diameter of the moving piston is 42 mm, and the thickness of the cylinder is 11 mm. Table 1 shows the structural parameters of the metal foam MR fluid damper before and after optimization.

Effect of the structure parameters on the maximum magnetic flux density in the shear gap
3.2 The magnetic flux density in the shear gap before and after optimization
The shear performance of the metal foam MR fluid damper is mainly determined by the magnetic field distribution in the shear gap. Here, FEM software is employed to simulate the magnetic flux density for different currents, as shown in Fig. 3a, b. Figure 3a is the magnetic flux density in the working gap before optimization, and Fig. 3b is the magnetic flux density after optimization (the current is 1.0 A). The two figures show that, after optimization, the magnetic field distribution in the shear gap is more uniform, especially in the shearing area of the piston head, from which, it can be found that the optimization is effective.

Magnetic flux density in the working gap
Figure 4 presents the simulation results of the magnetic flux density in the shear gap before and after optimization, for different currents. When the excitation current is changed from 0 to 0.5 A, as the current increases, the magnetic flux density in the shear gap increases linearly; from 0.5 to 1.5 A, the increase of the magnetic flux density is slower; however, once the current is above 1.5 A, the increase is no longer obvious due to the magnetic saturation. On the whole, before and after optimization, the magnetic flux density in the metal foam MR damper after optimization is clearly larger than that before optimization; for example, when the current is 0.5 A, the magnetic flux density is approximately 0.42 T before optimization, and after optimization, the magnetic flux density is approximately 0.57 T.

Effect of the current on the magnetic flux density after optimization
4 Experimental results and discussion
4.1 Experimental setup and methods
The MR fluid used in the experiment is MRF-J01T, which consists of magnetizable particles in micron-size, hydrocarbon-based oil and other additives, provided by the Chongqing Instrument Materials Institute, China. The density of the MR fluid is 2.65 g/cm3, the viscosity of the specimen at zero magnetic field is 0.8 Pa.s, and the volume fraction of solid magnetic particles (mainly carboxyl iron) is approximately 30%. The magnetizable particles can be viewed as spherical with typical dimensions of approximately 1–5 μm in diameter. To investigate the mechanical properties of metal foam MR fluid damper, a testing system is built. The working procedures and test system are shown in Fig. 5. In addition to the metal foam MR damper, the system also has several other major components. The metal foam MR damper is driven by a DC motor (model: YJ01) whose speed can be adjusted by a controller with a speed encoder. A force sensor with an amplifier is used to measure the damper force delivered through the metal foam MR damper. The coil is activated by a power supply. The test signals are gathered and processed by a DAQ and a PC with LabVIEW software. A timer is designed to synchronize the start of the magnetic field application and the measurement starting point. The strength of the magnetic field can be adjusted by changing the current.

Testing system of the metal foam MR fluid damper
4.2 Effect of shear rate on the damping force
The relationship between the shear force of the metal foam MR fluid damper and the shear rate is investigated before and after optimization, as shown in Fig. 6. From Fig. 6, the shear force will decrease as the shear rate increases, which is mainly due to the extracted volume of the MR fluid from the metal foam decreasing with the increasing shear rate. According to our previous investigation, the shear force is sensitive to the extracted volume of the MR fluid. In addition, from Fig. 6, for the same shear rate, when the current ranges from 0.5 to 1.0 A, the difference of the shear force in the metal foam MR fluid damper is the most obvious, and from 1.0 to 1.5 A, the difference becomes small; however, when the current changes from 1.5 to 2.0 A, it will be no longer obvious. For the same shear rate and current, compared to the shear force of the metal foam MR fluid damper before optimization, the shear force after optimization increases clearly.

Effect of shear rate on the damping force
4.3 Effect of current on the damping force
To investigate the effect of the excited current on the shear force before and after the optimization, currents of 0.5 A, 1.0 A, 1.5 A, and 2.0 A are employed. In addition, the shear rates, including 2 s−1, 4 s−1, 6 s−1, 8 s−1, and 10 s−1, are also tested, as shown in Fig. 7. The effect of different currents on the shear force of the metal foam MR damper is obtained before and after optimization. Figure 7 shows that, when the shear rate is constant, when the current increases gradually, the shear force will also increase. When the excited current increases from 0.5 to 1.5 A, as the current increases, the shear force increases linearly; however, once the current is above 1.5 A, the increase of the shear force will be no more obvious, which is also mainly due to the magnetic saturation.

Effect of current on the shear force
For a more obvious comparison before and after optimization, for the same shear rate, the relationship between the shear force and excited current is obtained, as shown in Fig. 8; here, the shear rate is 2 s−1. From Fig. 8, we can find that the shear force of the optimized metal foam MR damper increases significantly; when the excited current is 1.0 A, the shear force after optimization is approximately 12.56 N, which is a factor of 1.46 larger than the value before optimization (approximately 8.6 N).

Shear force at a shear rate of 2 s−1
5 Conclusion
In this paper, the structural parameters of a metal foam MR fluid damper are optimized, and the shear force is investigated experimentally before and after optimization. In addition, the influences of the excited current and shear rate on the shear performance of the metal foam MR fluid damper re also obtained. The experiment results show that, compared to the shear force before optimization, the shear force of the optimized metal foam MR damper is significantly increased, which provides an experimental basis for further popularization and application of the metal foam MR fluid damper.
References
Carlson, J.D.: Low-Cost MR Fluid Sponge Devices. J. Intell. Mater. Syst. Struct. 10, 589–594 (1999)
Carlson, J.D., Sproston J.L.: Controllable fluids in 2000-status of ER and MR fluid technology. In: The 7th International Conference on New Actuofor, pp. 126–130. Bermen, Germany (2000)
Choi, S.B., Lee, H.H., Song, H.J., Park, J.S.: Vibration control of a passenger car using MR engine mounts. Proc. SPIE’s 9th Ann. Symp Smart Struct. Mater. 4701, 1–8 (2002)
Gordaninejad, F., Wang, X., Hitchcock, G., Bangrakulur, K., Ruan, S., Siino, M.: Modular high-force seismic magneto-rheological fluid damper. J. Struct. Eng. 136, 135–143 (2010)
Lee, H.S., Choi, S.B.: Control and response characteristics of a magneto-rheological fluid damper for passenger vehicles. J. Intell. Mater. Syst. Struct. 11, 80–87 (2000)
Liu, X.H., Wong, P.L., Wang, W., Bullough, W.A.: Feasibility study on storage of magneto-rheological fluid using metal foams. J. Intell. Mater. Syst. Struct. 21, 1193–1200 (2010)
Liu, X.H., Gao, X.L., Li, F., et al.: Shear performance of a metal foam MR fluid damper. IEEE Trans. Magn. 51(1), 46001 (2015)
Nguyen, Q.H., Choi, S.B.: Optimal design of MR shock absorber and application to vehicle suspension. Smart Mater. Struct. 18(3), 035012 (2009)
Rabinow, J.: The magnetic fluid clutch. Electr. Eng. 67(12), 1167 (1951)
Yao, X.Y., Liu, X.H., Yu, M., et al.: Dynamic response time of a metal foam magneto-rheological damper. Smart Mater. Struct. 22, 025026 (2013)
Acknowledgements
The work described in this paper was supported the National Natural Science Foundation of China (No. 51675345), the Zhejiang Basic Public Welfare Research Project No. LGG19F020013, and the Shanghai Natural Science Foundation of China (16ZR1435800).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zhi Shen, W., Hong Bo, W., Tiantian, G. et al. Parameter optimization of a metal foam magneto-rheological damper. Int J Mech Mater Des 16, 323–330 (2020). https://doi.org/10.1007/s10999-019-09463-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10999-019-09463-z