
Abstract
Context
With accelerating global declines in biodiversity, establishment and expansion of conservation areas (CAs) have increasingly been advocated in recent decades. Gap analysis has been useful to evaluate the sufficiency and performance of CAs.
Objectives
Researchers often identify putative gaps in the protection of biodiversity in CA networks, drawing on evidence from species occurrence patterns (i.e., representation), yet the effect on the gap analyses of the spatial configuration of CAs is poorly understood.
Methods
Focusing on two large, charismatic carnivores of western Asia, Persian leopard and Asiatic cheetah, we used species distribution models (SDMs) to map potentially suitable habitats throughout the region. We calculated species representation for four categories of CAs within the conservation network in Iran and used a new application of graph theory to include their spatial configuration into our gap analysis. We then regressed species representation against spatial configuration to provide more insights into the performance of different categories of CAs.
Results
Results showed that the existing CA network conserves only 32% of the suitable habitats for the two species. Leveraging spatial configuration of the conservation areas into the gap analysis, however, revealed that the recently-established less strictly CAs disproportionately provide a higher contribution to the collective effectiveness of the entire conservation network.
Conclusions
We introduce network bias as a new concept in reserve design and argue that incorporating spatial configuration into CA gap analysis improves the ability to evaluate the effectiveness of reserve network designs, and is an important decision support tool for integrated conservation planning.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Conservation areas (CAs) are critical to sustaining natural ecosystems in the context of expanding human impact. Although covering only 15% of Earth's terrestrial area (Juffe-Bignoli et al. 2014; Visconti et al. 2019), the global conservation network has been rapidly expanded in the last decade (Watson et al. 2014). However, CA networks still show substantial gaps in coverage of global biodiversity (Jenkins et al. 2013). Gap analysis and conservation prioritization have been extensively applied to evaluate the sufficiency of existing conservation networks and inform decisions regarding new CA designations (Rodrigues et al. 2004b; Santini et al. 2014). The immediate goal of a gap analysis is to quantifiably assess representativeness (i.e., complementarity) of biodiversity within CAs (Rodrigues et al. 2004b). While in many cases gap analysis is used to compare across different taxa (Rodrigues et al. 2004b; Jenkins et al. 2013), in others it is used to evaluate protection efforts (Rodrigues et al. 2004a; Araújo et al. 2007).
Among the 20 Aichi targets which the global community committed to in the Convention on Biological Diversity (CBD), target 11 emphasizes expanding the current CAs to cover 17% of terrestrial ecosystems by 2020, while preserving and improving network connectivity (CBD 2010). Since then a multitude of literature has informed the ongoing expansion of CA network (Jenkins et al. 2013), while many aspects of their functionality remain disregarded (Santini et al. 2014). For example, the spatial configuration of core habitats (or CAs as the remaining strongholds) plays a key role in the persistence of a species, particularly for large carnivores (Cushman et al. 2018; Macdonald et al. 2018). However, in many cases CAs are fragmented into small and isolated patches, which may reduce performance in securing population viability (Santini et al. 2014), Rapid ongoing human land-use changes further compound this by increasing degradation of habitats outside of CAs and increasing the isolation of CAs from each other (Cushman et al. 2017; Hearn et al. 2018; Macdonald et al. 2018). Moreover, location bias is a common type of conservation inefficiency through which the establishment of CAs is concentrated in topographically rugged landscapes, often at high elevations, away from human-dominated areas (Gaston et al. 2008; Watson et al. 2014). Those ‘rock and ice’ areas (Joppa and Pfaff 2009), which often have relatively low productivity and low species richness, appear to be established to minimize conflicts with human land uses, and thus, bias towards these infertile or remote areas has lessened conservation effectiveness (Venter et al. 2018).
Gap analysis has primarily been investigated in terms of species representation in CAs, which in turn, is surrogated by habitat suitability maps (Maiorano et al. 2006; Yousefi et al. 2015) or coarse-scale geographic ranges (e.g., extent of occurrence) and atlases (Araújo et al. 2007; Jenkins et al. 2015). Species distribution models (SDMs) have been an operative tool to explore the patterns of species distribution (Franklin 2010), with many applications to biodiversity conservation (see Guisan et al. 2013 for a review). SDMs, by providing spatially explicit predictions over unsampled areas, are particularly insightful for understanding large carnivores’ distribution dynamics and habitat mapping, and thus have been widely used to evaluate large carnivores’ habitat suitability (Farhadinia et al. 2015; Ahmadi et al. 2017; Ashrafzadeh et al. 2018).
Traditional gap analysis based on species representation usually focuses on how well CA networks overlap, or “cover” the species distributions (Jennings 2000). Landscape ecology, and the various metrics developed in it, have been frequently used to assess the spatial configuration of CAs (Meyer et al. 2015; Cushman et al. 2018) and their connectivity (Saura et al. 2018), yet their appropriateness to gap analysis has not been critically evaluated (but see Santini et al. 2016). In the current study, we based our gap analysis on the concept of focal species (Carroll et al. 2001) to evaluate the effectiveness of, and quantify gaps in, Iran’s conservation network. We focused on the distribution of Persian leopard (Panthera pardus saxicolor, Pocock 1927) and Asiatic cheetah (Acinonyx jubatus venaticus, Griffith 1821) in Iran, two conservation-dependent species with different habitat requirements.
These two charismatic big cats are the paramount representatives of remaining terrestrial habitats in western Asia (Kiabi et al. 2002; Farhadinia et al. 2017) and have been recognized as landscape species in central Iranian plateau (Khosravi and Hemami 2019). Occurring in scattered patches within semi-arid lowland areas of central and eastern Iran, a few dozen Critically Endangered Asiatic cheetahs represent the last remnants of a historical population that spanned western Asia (Farhadinia et al. 2017). In contrast, the Endangered Persian leopards inhabit rugged terrain across much of western Asia and the Caucasus (Gavashelishvili and Lukarevskiy 2008). In some arid regions of Central Iran, their distributions overlap (Hemami et al. 2018).
Here, we used SDMs to identify potentially suitable habitats for Persian leopard and Asiatic cheetah in Iran and assessed the species representation in the CA network by calculating the coverage of suitable habitats within Iran’s CAs. We then used landscape connectivity metrics and leveraged the spatial configuration of CAs into our gap analysis. Our combined approach for gap analysis enabled us to evaluate the efficiency of different categories of CAs, given their conservation strictness, species representation and spatial configuration for safeguarding these two large carnivore species. This approach is potentially applicable in other species recovery planning through enhancing gap analysis efforts.
Methods
Study area and species data
We confined the study to areas with the highest probability of occurrence of Persian leopard and Asiatic cheetah in Iran, covering a total area of 1.648 million km2 of the Iranian plateau (Fig. 1). This region of western Asia is an inland great basin which is bounded by a complex of mountain chains, including the Alborz and Zagros in the north and west, and the massifs of Afghanistan and Baluchistan in the east. Natural vegetation cover of the study area is characterized by (1) Hyrcanian forests, which form an arc from the Caspian Sea and the Alborz Mountains in the North, (2) patchy forest stands and shrublands distributed across rough steppes of the Zagros Mountains in the west, and (3) flat drylands with sporadic mountainous areas covered by xerophytic taxa of Artemisia siberi, Stipa sp. and Salsola sp. in the center of the plateau.

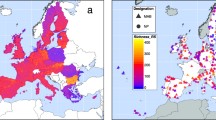
Habitat suitability of Persian leopard (a, b) and Asiatic cheetah (c, d) in southwestern Asia. Continuous maps (a, c) were derived based on an ensemble distribution model of GLM, GAM, GBM and MaxEnt models. Binary maps (b, d) generated to identify core habitat patches using 10-percentile suitability at occurrence points of each species as a presence/absence threshold
Generally, four categories of CAs are designated in Iran: National Parks (NPs), National Heritage Sites (NHSs) often called National Natural Monuments, Wildlife Refuge (WRs), and Protected Area (PAs). NPs are designated to protect outstanding environmental features and high biodiversity. Accordingly, the highest protection status is afforded to these areas. WRs and PAs are established and managed because of the high diversity of species in need of protection, and thus, WRs and PAs are in the next rank of conservation attention, respectively. These areas typically experience a higher intensity of human impacts due to the lower level of protection compared to NPs (Kolahi et al. 2012). In addition to these categories, No-Hunting Areas (NHA) are the least strictly protected category of Iranian conservation areas, where the main objective is to empower anti-poaching measures. CAs of Iran correspond with Category II, Category III, Category IV and Category IV–VI of the IUCN.
Species occurrence data were collected from direct field sampling by the authors (MSF, BNB, and HJ) and game rangers of the Department of Environment (DoE), and also from camera-trap photographs obtained during 2010–2017. Altogether, 632 and 680 occurrence points were compiled for Persian leopard and Asiatic cheetah, respectively (Table 1), covering the full distribution of the species in Iran. Often, available data of the species’ locations are spatially biased toward areas easily assessed and/or better surveyed. In this situation, spatial autocorrelation among locations can result in biased parameter estimates and over-representation of some regions (Dormann et al. 2007). We ran a Global Moran’s I test to assess the spatial autocorrelation of the occurrence points across the study area. To address auto-correlation arising from the spatial-dependency of the clumping points, we followed a spatial filtering procedure (Kramer-Schadt et al. 2013) in which multiple points within a 5-km distance (Farhadinia et al. 2015) were removed. After this spatial filtering 423 and 205 occurrence points of the two species were retained for SDM modelling. For both species, presence locations were obtained through a long-term and continuous monitoring program in all potential habitats. Therefore we are confident that our dataset doesn’t suffer significant sampling bias and incompleteness.
Explanatory variables
Four categories of environmental factors including land cover, prey availability, anthropogenic and topographic variables were used in SDM. Land cover variables, including dense to moderate density forest, scrub-shrub land, sparse vegetation, unvegetated bare lands (e.g. playas and salt lands) and cropland, were extracted from a land cover map of Iran produced by Iranian Forests, Ranges and Watershed Management Organization (IFRWO). A moving window procedure was used to calculate the proportion of each cover type within a 5 × 5 km grid.
Small to medium-sized ungulates, including roe deer (Capreolus capreolus, Linnaeus 1758), red deer (Cervus elaphus, Linnaeus 1758), bezoar goat (Capra aegagrus, Erxleben 1777), wild sheep (Ovis orientalis, Linnaeus 1758), goitered gazelle (Gazella subgutturosa, Güldenstädt 1780) and chinkara (G. bennettii, Sykes 1831), are the main prey of Persian leopard and Asiatic cheetah in Iran (Farhadinia and Hemami 2010; Farhadinia et al. 2018a). Prey distribution data were obtained from Karami et al. (2012). We overlaid shapefiles of the distribution of these prey species and calculated distance to areas known to support them to obtain a composite map of their distribution in Iran.
To include the anthropogenic effects in the species distribution models, we used the human footprint model (Sanderson et al. 2002) which combines data on population density and the presence of human infrastructure (i.e., road networks, land transformation, and human access). We used the Shuttle Radar Topography Mission (SRTM) elevation model (https://srtm.csi.cgiar.org) to measure elevation and topographic roughness (i.e., the standard deviation of the elevation of all raster cells within a grid of 5 × 5 km). All the explanatory variables were resampled to a cell size of 1 × 1 km and projected to a Lambert conformal conic projection. Pairwise Pearson correlation analysis was used to evaluate multi-collinearity among predictors, revealing no evidence of high multi-collinearity (pairwise correlation coefficient for all predictors < 0.7).
Species distribution modelling
To develop distribution models, we used two regression-based models including generalized linear models (GLM) and generalized additive models (GAM), together with two high-performing machine learning methods, generalized boosted models (GBM) and maximum entropy modeling (MaxEnt). We then combined the resulting models into an ensemble model using the biomod2 package (Thuiller et al. 2009) in R 3.5 (R Development Core Team 2016). As all these models require background data (e.g., pseudo-absence points), we generated 10,000 background points randomly distributed across the extent of the study area, excepting cells with presence points. We used 75% of occurrence points for training the models and the remaining 25% was used to test their performance. The area under the curve (AUC) of the receiver operating characteristic (ROC) plot was used to assess discrimination capacity and the true statistic skill (TSS) was used to evaluate the classification accuracy of models. We then converted the continuous ensemble model for each species to binary presence/absence map considering 10th percentile of suitability score at the occurrence points of each species as the classification threshold. Using this threshold has two advantages. First, it allowed us to exclude marginal points that occurred in areas with very low or none-suitable habitat conditions, and second, it enabled us to take into account the probable spatial bias or uncertainties caused by outlier occurrence points.
The reliability of gap analysis depends on how accurately habitat patches are recognized and incorporated into the procedure. To identify habitat patches we leveraged two preliminary rules based on previous findings on the spatial ecology of the species. First, we retained habitat patches larger than the minimum patch size needed to hold breeding populations of leopards in Iran, ~ 250 km2, (Ghoddousi et al. 2010). We then calculated the nearest-neighbor distance between patches and removed unoccupied habitat patches that were greater than 200 km from occupied patches [~ equal to the longest movement has been recorded for Asiatic cheetah in arid ecosystems of Iran (Farhadinia et al. 2016)] to exclude suitable patches from inaccessible areas.
Gap analysis and conservation prioritization
We based the gap analysis framework upon two methods, the degree of protection granted to the suitable landscapes by the CAs, and ranking them using the probability of connectivity (PC) index. For the degree of protection granted by each conservation category, we calculated total conservation coverage (i.e., the proportion of conserved areas from the total suitable habitats), and conservation efficiency (i.e., the proportion of conserved areas in each conservation category to the total area of that category). Of the metrics developed to date for measuring the importance of a given location in a connectivity network, the PC index, which is based on habitat availability, interpatch dispersal probabilities, and graph theory, performs best in practical landscape analysis (Saura and Pascual-Hortal 2007). The PC index reflects the probability that two animals randomly placed within the landscape fall into habitat areas that are reachable from each other (interconnected) given the set of habitat patches and the connections among them (Saura and Rubio 2010).
In this research, the latest shapefiles of Iran’s conservation network including National Parks, Protected Areas, Wildlife Refuges, and No-Hunting Areas were overlaid with the binary presence/absence maps of the SDM analysis to calculate the extent of suitable areas within and outside the CA boundaries. The PC index was then used to prioritize CAs with the highest potential for maintaining ecological integrity and long-term population viability of the species. We assumed that each of the CAs functioned as habitat patches and used the extent of suitable habitats within them as patch attributes for calculating PC index values. PC was calculated using Conefor 2.6 software (Saura and Torne 2009). The Conefor also requires specification of distance-probability values corresponding to the dispersal ability of the target species. Given the measured dispersal distances of the species in previous studies (Farhadinia et al. 2018b), we chose 50 km as a median dispersal distance and 200 km as a maximum dispersal distance. Accordingly, as recommended by Saura and Torne (2009), we set distance-probability values of 0.5 and 0.05 for median and maximum dispersal distances, respectively. For more details on the calculation of PC index please see the Supporting Information.
To provide more insights into the importance of CAs for habitat connectivity we also measured three fractions of the PC (dPC index, dPCintra, dPCflux and dPCconnector) separately. These metrics assess different ways a CA can contribute to landscape connectivity (Saura and Rubio 2010). Specifically, dPCintrak only measures intrapatch connectivity, while dPCflux reflects both patch attributes (e.g., area of suitable habitats) and its position within the landscape, and dPCconnector depends only on the topological position of a patch in the landscape (Saura and Rubio 2010).
Results
All models showed high degrees of discrimination capacity (AUC > 0.85 and > 0.90 for Persian leopard and Asiatic cheetah, respectively) and classification accuracy (TSS > 0.58 and > 0.68 for Persian leopard and Asiatic cheetah, respectively). For both species, GBM obtained the highest AUC and TSS values. Figure 1 represents the predicted suitable habitats of the species based on an ensemble of the 4 SDMs. The conversion of continuous habitat suitability models to binary presence/absence maps and the application of the two qualification criteria resulted in patches of suitable habitat (Fig. 1b, d) with a total area of 316,984 km2 and 97,338 km2 for Persian leopard and Asiatic cheetah, respectively. We also found a greater mean patch size for Asiatic cheetah (4424 km2, 388–21,403 km2) compared to Persian leopard (3522 km2, 257–110,348 km2). Merging suitable patches indicated 400,071 km2 of the region as the most suitable areas for the occurrence of both of these two large carnivores (Online Appendix Fig. S3).
Gap analysis showed that the set of patches suitable for both species had intersected with 261 conservation units of the 376 CAs, which collectively cover 126,745 km2 (31.6%) of the total jointly suitable habitat for both species (Table 2). Among these 261 CAs, Protected Areas with a total number of 117 and a total area of 53,791 km2 (13.4% of whole suitable habitats) showed the highest species representation, followed by NHAs (total number 102 and conservation coverage 33,763 km2, 8.4%). WRs and NPs, with a total number of 23 and 19, and the total area of 30,344 km2 (7.6%) and 8845 km2 (2.5%), respectively, had the lowest species representation (Table 2).
Regarding the spatial configuration of the conservation units, NHAs in total showed higher values of the PC index compared to the other conservation categories, although we found a high variability in the dPC of the conservation units, particularly for WRs (Table 3, Fig. 2). We found that while WRs showed higher species representation (mean = 462 km2, SD = 360 km2) compared to NHAs (mean = 337 km2, SD = 273 km2), NPs (mean = 346 km2, SD = 334 km2), and PAs (mean = 363 km2, SD = 330 km2), NHAs surprisingly displayed the highest dPC value (mean = 0.75, SD = 0.67), followed by WRs (mean = 0.73, SD = 0.82), NPs (mean = 0.61, SD = 0.63) and PAs (mean = 0.53, SD = 0.65). In a similar pattern, comparing the contribution of CAs given the three fractions of the dPC index showed that WRs had the highest score for dPCflux, while NHAs had the highest values for dPCconnector (Table 3). It is worth mentioning that we found this pattern regardless of the outlier values (i.e., units with dPC values that were extreme based on a normal distribution of all conservation units). Our results also revealed that NPs and WRs had the strongest relationship between conservation coverage and dPC index (adj. R2 = 0.77 and 0.63, respectively), and NHAs (adj. R2 = 0.43) with the weakest relationship (Fig. 3).

Scatterplot of species representation (suitability coverage) and the probability of connectivity index (dPC) of the No-hunting Areas (NHAs), National Parks (NPs), Protected Areas (PAs) and Wildlife Refuges (WRs). dPC scores were calculated based on a median (50 km) and maximum dispersal distance (200 km) of the species

Nonlinear regression between species representation (suitability coverage) and the probability of connectivity index (dPC) of Iranian conservation units. dPC scores were calculated based on a median (50 km) and maximum dispersal distance (200 km) of the species. NPs national parks, WRs wildlife refuges, PAs protected area, NHAs no-hunting area
Discussion
The goal of this study was to provide a more effective and comprehensive analysis of the gaps in the conservation area network by taking into account both representativeness and spatial connection of the CAs. While conservation coverage is widely discussed in the literature, there remains a substantial lack of methods and evidence regarding how the spatial configuration of conservation units influences the effectiveness of integrated networks of CAs.
Our research revealed three levels of bias in Iran’s conservation network, all of which are also apparent on a global scale. In the first level, and similar to the findings of Joppa and Pfaff (2009), varying conservation effort has been invested in different components of the conservation network (more strictly protected areas, such as National Parks and Wildlife Refuges, versus less strictly conservation areas, such as Protected Areas and No-Hunting Areas), which has resulted in natural habitats being granted different levels of protection (we call this conservation bias). Four categories of CAs, including National Parks, Natural Heritage Sites, Wildlife Refuges and Protected Areas, have been established in Iran. Although different types of CAs are established to address different conservation targets and land use policies (Pressey et al. 2007), due to the higher costs of protection in Categories I and II, the global growth in gazetted CAs has frequently been concentrated in categories III–VI (Joppa and Pfaff 2009). As in the case of Iran, although NPs demonstrate higher protection efficiency (77%), they comprise only 7% of the total number of CAs and provide the least protection coverage (2.5%).
The CBD in general, and the flexibility of Aichi targets in particular, allow nations to design their own conservation ambitions and designations to reflect local opportunities and needs. Similarly, in Iran no-hunting areas, which are the newest category of CAs, have recently been designated to restore wildlife in areas where their populations have declined due to uncontrolled hunting. NHAs have the main objective of empowering anti-poaching measures, unlike NPs or WRs/PAs, where development and land use should be omitted or controlled, respectively. Although more strictly protected areas have stronger legal guarantees against anthropogenic impacts, conflicts with the desires of local communities often lead politicians to respond negatively toward expansion or assignment of new CAs (Joppa and Pfaff 2009; Andam et al. 2013). Interestingly, more strictly protected areas are not necessarily more protective of biodiversity (for example see Andam et al. 2013; Ferraro et al. 2013). In this context, assigning less strictly protected areas (e.g., NHAs in Iran, or IUCN’s Category V and Category VI) in areas with long-term human land-use and resource-utilization histories could be a pragmatic solution for the recovery of vanishing species while affording fewer costs for conservation agencies.
Second, the establishment of CAs is concentrated in geographically remote and less demanding landscapes, which we call location bias, was seen for Asiatic cheetahs. In contrast, suitable habitats for the Persian leopard included higher levels of human activities, which is explainable, in part, by the leopard’s greater ability to coexist in human-dominated landscapes (Farhadinia et al. 2018b; Soofi et al. 2019).
Finally, in addition to the conservation bias and location bias which have been convincingly addressed in the literature (Joppa and Pfaff 2009; Watson et al. 2014; Venter et al. 2018), we introduce ‘network bias’ as a new level of bias in conservation planning, where CAs are established and/or expanded regardless of their position within the compositional structure of all conservation units. We found that, based on a typical gap analysis (i.e., species representation), NHAs show similar protection performance (conservation coverage) compared to the other CAs. However, when spatial effectiveness is included in our evaluation by adding the concept of spatial configuration, NHAs are revealed to be higher priorities for habitat connectivity and population integrity.
A potential criticism of metrics used to quantify landscape connectivity is that they tend to give high importance to large patches, and undervalue the contribution of connecting elements and/or stepping stone patches (Ferrari et al. 2007). One advantage of the PC index is that it enables quantification of how different critical patches are regarding both their habitat availability and topological position in the landscape (Saura and Rubio 2010). In the approach to gap analysis, we used this advantage of PC index and regressed the probability of connectivity onto habitat availability to identify how the different types of conservation networks vary for species representation and landscape configuration (see Table 3, Fig. 3). The highest and the lowest relationship was found for NPs and NHAs, respectively. This pattern, which is also supported by results of dPC fractions (Table 3), reflects the fact that area and habitat suitability per unit contribute to the high scores given to NPs by the dPC index, while the high scores given to NHAs by the dPCconnector reflect their greater contribuition to network connectivity compared to the other conservation units. Consequently, our gap analysis reveals that the more strictly protected areas (i.e., NPs and WRs) display high protection performance regarding species representation, while the newly-introduced and less strictly protected areas (i.e., NHAs) are stepping stones providing critical connections across the CA network. Consistent with our results, (Khosravi et al. 2018) also emphasized the importance of NHAs as stepping stones for large carnivore habitat connectivity in the deserts of central Iran.
We used the probability of connectivity index to measure the landscape integrity of the CAs. Intrinsically, the PC index measures functional connectivity of the habitat patches through the landscape (Saura and Pascual-Hortal 2007) and has been widely applied to problems of landscape conservation prioritization (Visconti and Elkin 2009; Ahmadi et al. 2017). It is worth mentioning that connectivity varies depending on the attributes of the target species or communities (Baguette et al. 2013). Accordingly, analyzing landscape connectivity is a species-specific process as it depends on the dispersal distance and behavioral response of the target species (e.g. Cushman et al. 2012; Baguette et al. 2013). While large carnivores with broad spatial requirements require comprehensive and large-scale management strategies, for movement-restricted species management activities could be downscaled to fine-scale structures such as hedgerow networks (Dondina et al. 2018). Nevertheless, addressing connectivity in conservation design requires assessing the complementarity of the components of a system to ensure the robustness of ecological functions. Landscape-scale approaches can account for the complexity of ecological functions, and so can enhance the capacity to designate elements of CA networks to best deliver desired conservation outcomes (Cushman 2006). Here we focused on conservation planning of the CAs within a large-scale management perspective and utilized the concept of focal species (e.g., dominant flagship and/or umbrella species) which may provide surrogates for a wide variety of subdominant species (Macdonald et al. 2017), which in turn rationalizes the use of the PC index for regional multi-species conservation planning. Notwithstanding, it is germane to consider that this line of reasoning suggests more research and necessitates consideration of the results of studies for a wide range of species.
Based on our suitability maps, Persian leopards mainly occur in mountainous landscapes, whereas Asiatic cheetahs are predominantly found in arid lowland landscapes. The species distribution models we produced in this study correspond well with findings of previous researches (Gavashelishvili and Lukarevskiy 2008; Farhadinia et al. 2015; Ahmadi et al. 2017; Khosravi et al. 2019), in particular, preference of these species for rugged landscapes with high availability of prey species and the avoidance of human-dominated areas (see the response curve of the variables provided in Online Appendix Figs. S1, S2). However, the two species showed different patterns of habitat selection in relation to human pressure. Although Asiatic cheetahs avoid areas even with minor human presence, Persian leopards have moderate tolerance towards humans in their habitat. Accordingly, conflict with communities due to livestock depredation is more widely reported for Persian leopards than Asiatic cheetahs (Babrgir et al. 2017; Soofi et al. 2019).
Conclusions
Expansion of current CAs and designating new conservation-oriented areas has been emphasized as an important strategy to mitigate the impacts of human society on biodiversity (COP 2010). Due to the shortage of funding resources and staff, as well as external threats from human land use changes (Joppa and Pfaff 2009; Hearn et al. 2018), efforts to assess the effectiveness of CAs and to strategically allocate management activities would greatly benefit from an assessment of the collective effectiveness of the entire network of CAs (Le Saout et al. 2013). In this research, the network of CAs of Iran was considered as a model for our new approach to gap analysis. This approach evaluates the different categories of CAs given their level of protection, species representation, and network connectivity. We showed that this approach is a simple and efficient method for rapid assessment of completeness and effectiveness of CA networks. Although species representation is widely used, we showed that taking into account both representativeness and spatial configuration of the CAs can effectively enhance conservation planning and can help address three main biases, particularly the network bias. The wide range of conservation area categories on a global scale, as well as the necessity to consider these three aspects in any gap analysis, suggests that our approach may be useful as a global model applicable to other species and geographical contexts.
References
Ahmadi M, Nezami Balouchi B, Jowkar H, Hemami MR, Fadakar D, Malakouti-Khah S, Ostrowski S (2017) Combining landscape suitability and habitat connectivity to conserve the last surviving population of cheetah in Asia. Divers Distrib 23:592–603.
Andam KS, Ferraro PJ, Hanauer MM (2013) The effects of protected area systems on ecosystem restoration: a quasi-experimental design to estimate the impact of Costa Rica's protected area system on forest regrowth. Conserv Lett 6:317–323
Araújo MB, Lobo JM, Moreno JC (2007) The effectiveness of Iberian protected areas in conserving terrestrial biodiversity. Conserv Biol 21:1423–1432
Ashrafzadeh MR, Khosravi R, Ahmadi M, Kaboli M (2018) Landscape heterogeneity and ecological niche isolation shape the distribution of spatial genetic variation in Iranian brown bears, Ursus arctos (Carnivora: Ursidae). Mamm Biol 93:64–75
Babrgir S, Farhadinia MS, Moqanaki EM (2017) Socio-economic consequences of cattle predation by the Endangered Persian leopard Panthera pardus saxicolor in a Caucasian conflict hotspot, northern Iran. Oryx 51:124–130
Baguette M, Blanchet S, Legrand D, Stevens VM, Turlure C (2013) Individual dispersal, landscape connectivity and ecological networks. Biol Rev 88:310–326
Carroll C, Noss RF, Paquet PC (2001) Carnivores as focal species for conservation planning in the Rocky Mountain region. Ecol Appl 11:961–980
CBD (2010) The strategic plan for biodiversity 2011–2020 and the Aichi Biodiversity Targets, Nagoya, Japan, 18 to 29 October 2010
COP, CBD (2010) Decision X/2: strategic plan for biodiversity 2011–2020. In 10th meeting of the conference of the parties to the convention on biological diversity, Nagoya, Japan
Cushman SA (2006) Effects of habitat loss and fragmentation on amphibians: a review and prospectus. Biol Conserv 128:231–240
Cushman SA, Elliot NB, Bauer D, Kesch K, Bahaa-el-din L, Bothwell H, Flyman M, Mtare G, Macdonald DW, Loveridge AJ (2018) Prioritizing core areas, corridors and conflict hotspots for lion conservation in southern Africa. PLoS ONE 13:e0196213
Cushman SA, Landguth EL, Flather CH (2012) Evaluating the sufficiency of protected lands for maintaining wildlife population connectivity in the US northern Rocky Mountains. Divers Distrib 18:873–884
Cushman SA, Macdonald EA, Landguth EL, Malhi Y, Macdonald DW (2017) Multiple-scale prediction of forest loss risk across Borneo. Landsc Ecol 32:1581–1598
Dondina O, Saura S, Bani L, Mateo-Sánchez MC (2018) Enhancing connectivity in agroecosystems: focus on the best existing corridors or on new pathways? Landsc Ecol 33:1741–1756
Dormann CF, McPherson JM, Araújo MB, Bivand R, Bolliger J, Carl G, Davies RG, Hirzel A, Jetz W, Kissling WD (2007) Methods to account for spatial autocorrelation in the analysis of species distributional data: a review. Ecography 30:609–628
Farhadinia MS, Ahmadi M, Sharbafi E, Khosravi S, Alinezhad H, Macdonald DW (2015) Leveraging trans-boundary conservation partnerships: persistence of Persian leopard (Panthera pardus saxicolor) in the Iranian Caucasus. Biol Conserv 191:770–778
Farhadinia MS, Gholikhani N, Behnoud P, Hobeali K, Taktehrani A, Hosseini-Zavarei F, Eslami M, Hunter LT (2016) Wandering the barren deserts of Iran: illuminating high mobility of the Asiatic cheetah with sparse data. J Arid Environ 134:145–149
Farhadinia M, Hemami M-R (2010) Prey selection by the critically endangered Asiatic cheetah in central Iran. Journal of Natural History 44:1239–1249
Farhadinia MS, Hunter LT, Jourabchian A, Hosseini-Zavarei F, Akbari H, Ziaie H, Schaller GB, Jowkar H (2017) The critically endangered Asiatic cheetah Acinonyx jubatus venaticus in Iran: a review of recent distribution, and conservation status. Biodivers Conserv 26:1027–1046
Farhadinia MS, Johnson PJ, Hunter LT, Macdonald DW (2018a) Persian leopard predation patterns and kill rates in the Iran-Turkmenistan borderland. J Mammal 99:713–723
Farhadinia MS, Johnson PJ, Macdonald DW, Hunter LT (2018b) Anchoring and adjusting amidst humans: ranging behavior of Persian leopards along the Iran-Turkmenistan borderland. PLoS ONE 13:e0196602
Ferrari JR, Lookingbill TR, Neel MC (2007) Two measures of landscape-graph connectivity: assessment across gradients in area and configuration. Landsc Ecol 22:1315–1323
Ferraro PJ, Hanauer MM, Miteva DA, Canavire-Bacarreza GJ, Pattanayak SK, Sims KR (2013) More strictly protected areas are not necessarily more protective: evidence from Bolivia, Costa Rica, Indonesia, and Thailand. Environ Res Lett 8:025011
Franklin J (2010) Mapping species distributions: spatial inference and prediction. Cambridge University Press, Cambridge
Gaston KJ, Jackson SF, Cantú-Salazar L, Cruz-Piñón G (2008) The ecological performance of protected areas. Annu Rev Ecol Evol Syst 39:93–113
Gavashelishvili A, Lukarevskiy V (2008) Modelling the habitat requirements of leopard Panthera pardus in west and central Asia. J Appl Ecol 45:579–588
Ghoddousi A, Hamidi AK, Ghadirian T, Ashayeri D, Khorozyan I (2010) The status of the endangered Persian leopard Panthera pardus saxicolor in Bamu National Park. Iran Oryx 44:551–557
Guisan A, Tingley R, Baumgartner JB, Naujokaitis-Lewis I, Sutcliffe PR, Tulloch AI, Regan TJ, BrotonsL McDonald-Madden E, Mantyka-Pringle C (2013) Predicting species distributions for conservation decisions. Ecol Lett 16:1424–1435
Hearn AJ, Cushman SA, Goossens B, Macdonald E, Ross J, Hunter LT, Abram NK, Macdonald DW (2018) Evaluating scenarios of landscape change for Sunda clouded leopard connectivity in a human dominated landscape. Biol Conserv 222:232–240
Hemami M-R, Esmaeili S, Brito JC, Ahmadi M, Omidi M, Martínez-Freiría F (2018) Using ecological models to explore niche partitioning within a guild of desert felids. Hystrix Ital J Mamm 29:216–222
Jenkins CN, Pimm SL, Joppa LN (2013) Global patterns of terrestrial vertebrate diversity and conservation. Proc Natl Acad Sci 110:E2602–E2610
Jenkins CN, Van Houtan KS, Pimm SL, Sexton JO (2015) US protected lands mismatch biodiversity priorities. Proc Natl Acad Sci 112:5081–5086
Jennings MD (2000) Gap analysis: concepts, methods, and recent results. Landsc Ecol 15:5–20
Joppa LN, Pfaff A (2009) High and far: biases in the location of protected areas. PLoS ONE 4:e8273
Juffe-Bignoli D, Burgess ND, Bingham H, Belle E, De Lima M, Deguignet M, Bertzky B, Milam A, Martinez-Lopez J, Lewis E (2014) Protected planet report 2014. UNEP-WCMC, Cambridge
Karami M, Ghadirian T, Faizolahi K (2012) The atlas of mammals of Iran. Department of Environment, Tehran
Khosravi R, Hemami MR (2019) Identifying landscape species for ecological planning. Ecol Ind 99:140–148
Khosravi R, Hemami MR, Cushman SA (2018) Multispecies assessment of core areas and connectivity of desert carnivores in central Iran. Divers Distrib 24:193–207
Khosravi R, Hemami MR, Cushman SA (2019) Multi-scale niche modeling of three sympatric felids of conservation importance in central Iran. Landsc Ecol 34:2451–2467
Kiabi BH, Dareshouri BF, Ghaemi RA, Jahanshahi M (2002) Population status of the Persian leopard (Panthera pardus saxicolor Pocock, 1927) in Iran. Zool Middle East 26:41–47
Kolahi M, Sakai T, Moriya K, Makhdoum MF (2012) Challenges to the future development of Iran’s protected areas system. Environ Manage 50:750–765
Kramer-Schadt S, Niedballa J, Pilgrim JD, Schröder B, Lindenborn J, Reinfelder V, Stillfried M, Heckmann I, Scharf AK, Augeri DM, Cheyne SM, Hearn AJ, Ross J, Macdonald DW, Mathai J, Eaton J, Marshall AJ, Semiadi G, Rustam R, Bernard H, Alfred R, Samejima H, Duckworth JW, Breitenmoser-Wuersten C, Belant JL, Hofer H, Wilting A (2013) The importance of correcting for sampling bias in MaxEnt species distribution models. Divers Distrib 19:1366–1379
Le Saout S, Hoffmann M, Shi Y, Hughes A, Bernard C, Brooks TM, Bertzky B, Butchart SH, Stuart SN, Badman T (2013) Protected areas and effective biodiversity conservation. Science 342:803–805
Macdonald DW, Bothwell HM, Hearn AJ, Cheyne SM, Haidir I, Hunter LT, Kaszta Ż, Linkie M, Macdonald EA, Ross J (2018) Multi-scale habitat selection modeling identifies threats and conservation opportunities for the Sunda clouded leopard (Neofelis diardi). Biol Conserv 227:92–103
Macdonald E, Hinks A, Weiss D, Dickman A, Burnham D, Sandom C, Malhi Y, Macdonald D (2017) Identifying ambassador species for conservation marketing. Glob Ecol Conserv 12:204–214
Maiorano L, Falcucci A, Boitani L (2006) Gap analysis of terrestrial vertebrates in Italy: priorities for conservation planning in a human dominated landscape. Biol Conserv 133:455–473
Meyer SR, Beard K, Cronan CS, Lilieholm RJ (2015) An analysis of spatio-temporal landscape patterns for protected areas in northern New England: 1900–2010. Landsc Ecol 30:1291–1305
Pressey RL, Cabeza M, Watts ME, Cowling RM, Wilson KA (2007) Conservation planning in a changing world. Trends Ecol Evol 22:583–592
R Development Core Team (2016) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria
Rodrigues AS, Akcakaya HR, Andelman SJ, Bakarr MI, Boitani L, Brooks TM, Chanson JS, Fishpool LD, Da Fonseca GA, Gaston KJ (2004a) Global gap analysis: priority regions for expanding the global protected-area network. Bioscience 54:1092–1100
Rodrigues AS, Andelman SJ, Bakarr MI, Boitani L, Brooks TM, Cowling RM, Fishpool LD, FonsecaGA Da, Gaston KJ, Hoffmann M (2004b) Effectiveness of the global protected area network in representing species diversity. Nature 428:640
Sanderson EW, Jaiteh M, Levy MA, Redford KH, Wannebo AV, Woolmer G (2002) The human footprint and the last of the wild: the human footprint is a global map of human influence on the land surface, which suggests that human beings are stewards of nature, whether we like it or not. AIBS Bull 52:891–904
Santini L, Di Marco M, Boitani L, Maiorano L, Rondinini C (2014) Incorporating spatial population structure in gap analysis reveals inequitable assessments of species protection. Divers Distrib 20:698–707
Santini L, Saura S, Rondinini C (2016) Connectivity of the global network of protected areas. Divers Distrib 22:199–211
Saura S, Bertzky B, Bastin L, Battistella L, Mandrici A, Dubois G (2018) Protected area connectivity: shortfalls in global targets and country-level priorities. Biol Conserv 219:53–67
Saura S, Pascual-Hortal L (2007) A new habitat availability index to integrate connectivity in landscape conservation planning: comparison with existing indices and application to a case study. Landsc Urban Plan 83:91–103
Saura S, Rubio L (2010) A common currency for the different ways in which patches and links can contribute to habitat availability and connectivity in the landscape. Ecography 33:523–537
Saura S, Torne J (2009) Conefor Sensinode 2.2: a software package for quantifying the importance of habitat patches for landscape connectivity. Environ Model Softw 24:135–139
Soofi M, Ghoddousi A, Zeppenfeld T, Shokri S, Soufi M, Egli L, Jafari A, Ahmadpour M, Qashqaei A, Ghadirian T, Filla M (2019) Assessing the relationship between illegal hunting of ungulates, wild prey occurrence and livestock depredation rate by large carnivores. J Appl Ecol 56:365–374
Thuiller W, Lafourcade B, Engler R, Araújo MB (2009) BIOMOD—a platform for ensemble forecasting of species distributions. Ecography 32:369–373
Venter O, Magrach A, Outram N, Klein CJ, Possingham HP, Di Marco M, Watson JE (2018) Bias in protected-area location and its effects on long-term aspirations of biodiversity conventions. Conserv Biol 32:127–134
Visconti P, Butchart SH, Brooks TM, Langhammer PF, Marnewick D, Vergara S, Yanosky A, Watson JE (2019) Protected area targets post-2020. Science 364:239–241
Visconti P, Elkin C (2009) Using connectivity metrics in conservation planning—when does habitat quality matter? Divers Distrib 15:602–612
Watson JEM, Dudley N, Segan DB, Hockings M (2014) The performance and potential of protected areas. Nature 515:67
Yousefi M, Ahmadi M, Nourani E, Behrooz R, Rajabizadeh M, Geniez P, Kaboli M (2015) Upward altitudinal shifts in habitat suitability of mountain vipers since the last glacial maximum. PLoS ONE 10:e0138087
Acknowledgements
We are grateful for the financial and technical support of the DoE of Iran, the Global Environmental Facilities (GEF), the United Nations Development Program (UNDP), and the Wildlife Conservation Society (WCS). We thank K. Baradarani and A. Taktehrani for their help in collecting leopard occurrence data. Our special thanks go to the game guards of the DoE who helped us in field sampling. MA received a sabbatical research fund from the Ministry of Sciences, Research and Technology of Iran for a 6-month research in Swiss Federal Research Institute (WSL). MSF was supported by a research fellowship from Oxford Martin School at the University of Oxford.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Ahmadi, M., Farhadinia, M.S., Cushman, S.A. et al. Species and space: a combined gap analysis to guide management planning of conservation areas. Landscape Ecol 35, 1505–1517 (2020). https://doi.org/10.1007/s10980-020-01033-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10980-020-01033-5