
Abstract
Context
Climate and land-use change have led to disturbance regimes in many ecosystems without a historical analog, leading to uncertainty about how species adapted to past conditions will respond to novel post-disturbance landscapes.
Objectives
We examined habitat selection by spotted owls in a post-fire landscape. We tested whether selection or avoidance of severely burned areas could be explained by patch size or configuration, and whether variation in selection among individuals could be explained by differences in habitat availability.
Methods
We applied mixed-effects models to GPS data from 20 spotted owls in the Sierra Nevada, California, USA, with individual owls occupying home ranges spanning a broad range of post-fire conditions after the 2014 King Fire.
Results
Individual spotted owls whose home ranges experienced less severe fire (< 5% of home range severely burned) tended to select severely burned forest, but owls avoided severely burned forest when more of their home range was affected (~ 5–40%). Owls also tended to select severe fire patches that were smaller in size and more complex in shape, and rarely traveled > 100-m into severe fire patches. Spotted owls avoided areas that had experienced post-fire salvage logging but the interpretation of this effect was nuanced. Owls also avoided areas that were classified as open and/or young forest prior to the fire.
Conclusions
Our results support the hypothesis that spotted owls are adapted to historical fire regimes characterized by small severe fire patches in this region. Shifts in disturbance regimes that produce novel landscape patterns characterized by large, homogeneous patches of high-severity fire may negatively affect this species.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Disturbance regimes create and maintain the characteristic vegetation patterns and dynamics to which animals are adapted in ecological systems (Lytle 2001; Betts et al. 2019). Climate and human land use change have led to modern disturbance regimes in many ecosystems that do not have a historical analog (Seidl et al. 2016), giving rise to novel post-disturbance landscape mosaics and altered regeneration pathways (Johnstone et al. 2016). Landscapes experiencing novel disturbance regimes are often characterized by changes in vegetation composition, patch size, and configuration that are expected to change selection pressures, which can affect the behavior and fitness of individual organisms (Karr and Freemark 1985). Responses to changing disturbance regimes vary among taxa (Elmqvist et al. 2003), but are likely to depend on the species’ degree of habitat specialization as well as the extent to which these novel disturbances affect resources that limit individuals and populations (e.g., nesting or denning sites, primary prey/food) (Clavero et al. 2011). Therefore, the way in which individuals and populations select or avoid conditions in novel post-disturbance landscapes may offer insights into the ability of species to persist in landscapes experiencing changing disturbance regimes.
Wildfire is an important disturbance regime that is changing worldwide (Turner 2010; Seidl et al. 2017), and is considered to be a significant evolutionary force (Bond and Keeley 2005; Pausas and Parr 2018; Foster et al. 2020). The dry forests of western North America appear to be experiencing changes from a historically frequent-fire regime that consisted of predominately lower-severity fire with a relatively small component of high-severity fire by comparison (Stephens and Collins 2004; Steel et al. 2015; Safford and Stevens 2017), to one where fires have become larger and more severe (Steel et al. 2015; Abatzoglou and Williams 2016; Westerling 2016). More frequent ‘megafires’ in western dry forests are generally thought to be the consequence of a century of fire suppression, which increased landscape fuels (Stephens et al. 2014; Collins et al. 2017a), and anthropogenic climate change, which produced conditions enhancing fire risk (Diffenbaugh et al. 2015). As a consequence, the patch structure in post-fire landscapes is increasingly characterized by homogeneous large patches of severely burned areas (Collins et al. 2017b; Stevens et al. 2017). Decreased heterogeneity in post-fire conditions (i.e., more homogeneously severe burned areas) may influence the behavior and space use of species that have evolved to exploit more heterogeneous environments and ultimately reduce individual fitness and population abundance.
Forest-dependent species inhabiting dry forests in western North America evolved under a frequent-fire regime that created diverse mosaics of post-fire conditions and thus have developed life history strategies to accommodate the structural and landscape heterogeneity created by fire. One of the more well-known of these species is the spotted owl (Strix occidentalis), an older-forest associated raptor that inhabits dry forests in portions of its geographical range that has been the focus of forest management conflict in the western United States for several decades (Simberloff 1987; Redpath et al. 2013; Gutiérrez et al. 2015). Recently, this conflict has shifted from “owls versus jobs” to “owls versus forest restoration”—a seemingly intractable conflict between efforts to increase resilience of seasonal dry forests and the conservation of spotted owl habitat (Peery et al. 2019; Stephens et al. 2019). A key feature of the current conflict involves the potential effects of large, severe wildfires on spotted owls. If such fires render forests unusable by spotted owls and thereby adversely affect owl populations, then fuels reduction activities (e.g., mechanical removal of small and medium trees, prescribed fire, and managed fire) might benefit this species by reducing severe fire impacts, if fuels reduction activities have minimal negative effects to owls (Peery et al. 2017). However, there is considerable disagreement in the literature regarding these tradeoffs and this has led to uncertainty about how to manage forests (Ganey et al. 2017; Lee 2018).
Uncertainties about how spotted owls respond to severe fire may resolved, in part, by (i) distinguishing between the mean, population-level response and variation in responses by individual owls that experience a range of post-fire conditions, and (ii) explicitly incorporating the role of the spatial configuration of severe fire (e.g., patch size and shape), which has not been the focus of previous studies (Ganey et al. 2017). Resource selection functions (RSFs) offer an analytical method for characterizing selection or avoidance of resources (hereafter ‘habitat’; i.e., cover types) that are available to individuals or populations (Manly et al. 2002). It is often assumed when using RSFs that individuals will select (or avoid) habitats in the same way (i.e., habitat selection is a constant function of habitat availability; Mysterud and Ims 1998). However, the strength of habitat selection or avoidance can vary strongly in both direction and magnitude among individuals within a population, so accounting for individual variation in selection patterns is important for statistically rigorous testing of population-level selection (Duchesne et al. 2010). Individual-specific habitat selection may vary as a function of habitat availability, a phenomenon known as a “functional response” in habitat selection (Mysterud and Ims 1998; Hebblewhite and Merrill 2008; Matthiopoulos et al. 2011; Aarts et al. 2013). Testing for functional responses may give insights into how individuals respond across a gradient of habitat conditions—including novel landscape conditions and configurations—and allow explicit testing of hypotheses about the effects of increasing novelty caused by either climate change or human impacts on habitat selection.
We used mixed-effects RSFs to examine both individual- and population-level habitat selection (Muff et al. 2020) in GPS-tagged California spotted owls (S. o. occidentalis) occupying home ranges containing a wide range of high-severity fire effects following a recent California megafire (2014 King Fire; Jones et al. 2016). We examined the potential effects of fire characteristics (fire severity, pyrodiversity, and severe fire patch size and configuration) on owls while controlling for potential confounding factors (pre-fire forest cover), post-fire salvage logging, and the central-place foraging behavior exhibited by spotted owls (Carey and Peeler 1995; Rosenberg and McKelvey 1999). Because spotted owls have presumably adapted to frequent-fire regimes dominated by lower-severity effects (Ganey et al. 2017; Rockweit et al. 2017), we predicted that individual owls would avoid severely burned forests when these areas comprised a large portion of the home range or occurred in large patches. We also predicted that spotted owls would select burned areas with greater pyrodiversity, which would be expected to create structural and landscape heterogeneity preferred by owls (Gutiérrez et al. 1995; Franklin et al. 2000). In addition, we tested for the potential effects of salvage logging in burned forests on habitat use because previous studies have found that spotted owls tend to avoid foraging in logged, post-fire landscapes (Comfort et al. 2016). We tested whether spotted owls exhibited functional responses to novel habitat conditions by assessing support for interaction terms within the RSF.
Methods
Study area
The study was conducted in the central Sierra Nevada, California, USA, as part of a longer-term spotted owl demographic study on the Eldorado and Tahoe national forests (Tempel et al. 2016; Jones et al. 2018). The study area was ~ 50,000-ha in size and consisted of mixed-use publicly-owned lands (~ 54%) managed by the U.S. Forest Service and privately-owned lands (~ 46%) managed primarily for timber resources. Elevations ranged from 590 to 2200 m, the climate was Mediterranean with warm, dry summers and cool, wet winters, and the dominant vegetation type was Sierran mixed-conifer montane forest. The elevational range, climate, and species composition of these forests historically resulted in frequent fires (mean return interval = 11 years; range = 5–50 years) of generally lower severity (5–15% area burned at high-severity), with some inclusion of smaller (< 10–100 ha) patches of high-severity fire (Stephens and Collins 2004; Safford and Stevens 2017).
In September and October 2014, the King Fire burned ~ 40,000 ha of primarily forested land in the central Sierra Nevada (Jones et al. 2016). Approximately half (~ 20,000 ha) of the King Fire burned at high-severity (> 75% canopy mortality), including very large contiguous patches, making the King Fire one of the largest and most uniformly severe fires in recent California history (Stevens et al. 2017). Areas along the fire boundary and in the southern portion of the King Fire experienced greater “mixed-severity” fire effects, characterized by a mosaic of low, moderate, and high-severity fire. Post-fire salvage logging occurred in portions of the burned area (Fig. 1) and the majority of salvage-logged areas (89%) occurred on private lands.

King fire study area, showing the extent of the fire, severe fire, salvage logging, and locations used by owls
Global positioning system (GPS) data
In 2015–2017, we captured adult spotted owls occupying forests within and near the King Fire perimeter (Fig. 1) and fitted them with 7–10 g backpack-mounted dual GPS/VHF units (hereafter “GPS tags”) (Biotrack Ltd., Wareham, UK). We exhaustively searched the study area to locate owls during daytime and nocturnal walk-in surveys, and once located we captured owls using snare poles, hand-grabs, or bal-chatri traps. All relevant state and federal permits were obtained prior to capture and handling. In 2015, 2016, and 2017, we deployed 12, 10, and 4 GPS tags, respectively (total n = 26). There were no owls available for GPS tagging within the large, severely burned patch in the center of the study area (Fig. 1) because owl territories in that patch went extinct immediately after the fire (Jones et al. 2016) and were not re-colonized during the course of the study (G.M. Jones, unpublished data). Three individual spotted owls with GPS tags dispersed before data could be retrieved (two in 2015, one in 2016), so our final sample size was 23. Of the 23 owls sampled, three individuals were sampled in consecutive years, which we accounted for by specifying a random effect for individual owl. GPS tags were deployed each year in May and early June and recorded 100–150 locations during nocturnal hours (1–3 per night; mean = 1.33/night/owl), and were retrieved in July and August. When multiple locations were recorded in a single night, they were pre-programmed to be separated by at least two hours to reduce spatial autocorrelation. GPS tags had a median location error of approximately ± 20-m when data were filtered to include only those points recorded with ≥ 5 satellites and a dilution of precision (DOP) ≤ 3 (HA Kramer, unpublished data), so we used only these data in analyses.
Habitat selection analysis
We analyzed our data using mixed-effects RSFs (logistic regression) with intercepts and slopes that varied by individual (Duchesne et al. 2010; Muff et al. 2020). Including coefficients that vary by individual enables explicit modeling of functional responses (Mysterud and Ims 1998) and reduces biases in estimated population-level (fixed) effects (Duchesne et al. 2010; Harrison et al. 2018). Available points were assigned weight W = 1000 to facilitate approximate convergence to the inhomogeneous Poisson process likelihood, and we fixed the variance term for individual-specific intercepts to a large value (σ2 = 1000) to avoid shrinkage toward zero (Muff et al. 2020). Available area for each individual owl was defined as a circle with radius equal to the furthest Euclidean GPS distance from the activity center (minimum radius = 1654.8 m; maximum = 5165.5 m; mean = 3437.6 m), where the activity center was the geometric mean of annual daytime nest and roost locations obtained from walk-in surveys. We generated 10 times as many available points as used points for each owl (Hooten et al. 2017). Available points were distributed uniformly with respect to distance to the activity center (i.e., all distances had equivalent point densities).
There were three types of inferences we were interested in drawing from mixed-effects RSF models. First, we were interested in understanding how spotted owl habitat selection was explained by a suite of environmental predictor variables including pre-fire forest conditions, fire conditions including whether or not areas burned at high-severity and the diversity of fire effects (pyrodiversity), and post-fire management (salvage logging). Second, we were interested in whether spotted owl use (or non-use) of areas that burned at high-severity could be explained by spatial characteristics of those areas, such as severe fire patch size and configuration. Finally, we wanted to examine whether there was evidence for functional responses in habitat selection. With respect to severe fire effects, these inferences can be viewed as a set of three sequential or hierarchical questions: do owls select or avoid severely burned areas; is that selection (or avoidance) mediated by spatial characteristics of severely burned areas; are these patterns driven by variation in the availability of severe fire within individual home ranges? We therefore examined these questions in three stages, constructing models in each stage that allowed us to test the underlying hypothesis related to each question in sequence.
In the first stage, we fitted a single model containing covariate effects for distance to activity center, pre-fire forest cover (sparse/open forest and young forest), and disturbance-related covariates (severe fire, pyrodiversity, and post-fire salvage logging) (Table 1). Each covariate effect was specified as having a fixed component (population-level coefficient that was constant across individuals) and a random component (coefficient varying by individual) following Muff et al. (2020). The model intercept varied by individual owl. We expected distance to activity center and pre-fire forest cover covariates to be important in explaining space use patterns in spotted owls, but they were not the central focus of this analysis; we included them to control for their potential effects. Distance to activity center was the Euclidean distance (m) between a given GPS location and the individual’s geographic activity center. Including distance to activity center as a model covariate in RSFs of central place foragers reduces the potential for a positive bias of selection for habitat types near the central place as well as a negative bias for habitat types more distant from the central place (Rosenberg and McKelvey 1999). Preliminary analyses supported the use of a quadratic (distance + distance2) form, which we used in all subsequent models. Pre-fire sparse/open forest cover was defined as 30 × 30-m pixels with < 40% canopy cover in the year prior to the King Fire (2014) as determined using the VEGCLASS variable classes 1 and 2 in the Gradient Nearest Neighbor (GNN) forest structure dataset for our study area (LEMMA Lab, Oregon State University, Corvallis, OR; lemma.forestry.oregonstate.edu) (Ohmann and Gregory 2002). Pre-fire young forest was also calculated using the VEGCLASS category of the GNN dataset (classes 3, 5, and 8), defined as 30 × 30-m pixels with > 40% canopy cover but with smaller trees (quadratic mean diameter < 25 cm). Including pre-fire sparse/open/young forest vegetation covariates controlled for potential bias toward avoidance of these forest types, independent of the post-fire vegetation patterns created by the King Fire. We assigned the pre-fire sparse/open or young forest class to used/available points when these cover types were the majority class within a 100-m buffer around a given point location.
Disturbance covariates were severe fire, pyrodiversity, and post-fire salvage logging (Table 1). We defined severe fire as areas that experienced > 75% overstory mortality resulting from the King Fire. We used the 75% overstory mortality threshold to define high-severity because it increases our capacity to compare our results to previous studies (Bond et al. 2009, 2016; Eyes et al. 2017), while acknowledging that more notable ecological effects may correspond with a higher (e.g. 90%) threshold (Miller and Quayle 2015; Jones 2019). We treated this covariate as a categorical effect, such that \({x}_{ij}=1\) if the GPS location for individual i = 1, …, I at location j = 1, …, \({J}_{i}\) occurred in severely burned forest and \({x}_{ij}=0\) otherwise. If a point fell within a severely burned area that was also salvage-logged (see below), we set the categorical effect for severe fire to \({x}_{ij}=0\) and the effect for salvage logging to \({x}_{ij}=1\). Thus, within our model the ‘severe fire’ effect can be interpreted as the selection coefficient for ‘unlogged snag forest’. We obtained burn severity data from the Monitoring Trends in Burn Severity (MTBS) project (www.mtbs.gov). We did not investigate potential selection patterns related to forests that burned at low- and moderate-severity because (i) we wanted to limit the number of candidate variables to reflect key hypotheses of interest and (ii) previous work has shown that either they do not affect spotted owls or owls generally use these types of burned forest in proportion to their availability during nocturnal hours (Bond et al. 2009, 2016; Jones et al. 2016; Eyes et al. 2017). Thus, low and moderate burn severities, as well as unburned forests, were effectively grouped together in the reference class of our models. However, we did more explicitly consider low and moderate fire severity in the context of pyrodiversity, which was defined as the Shannon Diversity Index of unburned or unchanged (under 5% site area burned), low severity (up to 25% overstory mortality), moderate severity (25–75% overstory mortality), and high-severity (over 75% overstory mortality) classes within a 100-m buffer of point locations. Based on Google Earth aerial imagery, we determined that the majority of salvage operations that occurred within owl home ranges were completed in late 2014 and early 2015 prior to the initiation of this study (2015), so we hand-digitized areas that had been post-fire salvage logged from the National Agriculture Imagery Program (NAIP) aerial imagery from July 2016. We delineated polygons containing visible heavy disturbance (including areas where logging roads had been created, presumably in preparation for salvage logging) in areas that burned in the King Fire, and that had forest present before the fire. While our delineation of salvage logging was limited to areas visibly discernable on NAIP imagery, territory-scale estimates of salvage were highly correlated (r = 0.88) with estimates obtained from timber companies conducting salvage operations within our study area (HA Kramer, unpublished data). We erased pre-fire sparse/open forest (GNN) and areas classified as unburned or outside the fire perimeter so that the salvage layer only included areas that were forested pre-fire and disturbed by dense road networks or logging post-fire. Approximately 80% of salvage logging occurred in areas that experienced high-severity fire.
In the second stage, we explored whether severe fire patch characteristics affected spotted owl habitat selection: patch size, patch complexity, and permeation distance (distance an owl traveled into a severely burned patch) (Table 1). We did so adding covariate effects for each of the above variables to the stage one model, and likewise allowed coefficients to vary by individual owl. Stage two variables were moderately- to highly-collinear with each other and therefore were not included in the same model; thus stage two consisted of three separate RSF models. Patch size was the total area (m2) of a severe fire patch delineated with the four-neighbor rule (Turner et al. 2001). Patch complexity was calculated as the perimeter-to-area ratio of a severe fire patch. Permeation distance was the minimum Euclidean distance (m) from a used or available point occurring within a severe fire patch to the patch edge (all points outside of severe fire patches were assigned x = 0). We transformed stage two variables using the natural logarithm (ln).
In the third stage, we tested for evidence of functional responses by including an interaction term between habitat availability at the level of the individual owl (the mean covariate value in an individual’s home range for available points) and the corresponding habitat covariate (sensu Matthiopoulos et al. 2011; Aarts et al. 2013). For example, to test for a functional response related to high-severity fire, we included: (i) a covariate for whether a used/available point occurred in severely burned forest (0/1; Table 1), (ii) a covariate that represented the proportion of an owl’s home range that burned severely (i.e., this covariate had a constant value for each individual), and (iii) an interaction between these two covariates. If the interaction term (slope) was statistically different from zero, we interpreted this as evidence in support of a functional response in habitat selection. We transformed habitat availability using the natural logarithm because functional responses are assumed to be non-linear (Mysterud and Ims 1998; Hebblewhite and Merrill 2008; Beyer et al. 2010). We conducted tests for functional responses among disturbance and patch-level covariates when individual coefficients (i.e. random slope variance) improved model fit according to likelihood ratio tests (see below) from stages one and two to minimize the potential for spurious inferences. We note that while using the mean habitat value within an individual’s home range is commonplace in the literature when computing functional response (Gillies et al. 2006; Hebblewhite and Merrill 2008; Aarts et al. 2013), the underlying assumption is that the average value sufficiently describes availability. Such an assumption could mask differences among individuals if the average availability does not reflect the encounter rate of different habitats across the landscape (Beyer et al. 2010).
We made inferences about the statistical importance of fixed effects from their direction (positive/negative), effect size (magnitude), and uncertainty (95% confidence intervals), but avoided interpreting the “significance” of estimates using arbitrary p-value thresholds when possible (Amrhein et al. 2019). We determined whether the variance terms for the random slopes improved model fit (test of H0: σ2 = 0) by performing likelihood ratio tests (LRT) using restricted maximum likelihood (REML) estimation, correcting for the ‘testing on the boundary’ problem using p = 0.5 × (χ12 + χ22) (Zuur et al. 2009). All mixed-effects models were fitted using REML (Zuur et al. 2009). We rescaled all continuous covariates to range from 0 to 1. We used the R packages glmmTMB v. 0.2.3 to fit models. All analyses were conducted in program R version 3.6.0.
Results
Variables describing the central place foraging behavior of owls, pre-fire forest cover, and disturbance effects were all associated with spotted owl habitat selection. Population-level (fixed) effects from the stage one model indicated overall selection for areas closer to the activity center (βdistance = 1.6, 95% confidence interval [− 0.19, 3.43]; βdistance2 = − 8.25 [− 11.44, − 5.06]). The model also indicated avoidance of pre-fire sparse/open forest (βsparse/open = − 1.00 [− 1.41, − 0.59]), young forest (βyoung = − 0.32 [− 0.63, − 0.001]), and salvage-logged areas (βsalvage = − 1.07 [− 1.88, − 0.26]) (Fig. 2a). The estimated coefficient for pyrodiversity was in the hypothesized direction (positive) but slightly overlapped zero (βpyrodiversity = 0.49 [− 0.12, 1.09]) (Fig. 2a). Similarly, the coefficient for the effect of severe fire (binary effect disregarding patch characteristics) was in the hypothesized direction (negative) but with confidence intervals that overlapped zero (βsevere = − 0.35 [− 1.07, 0.37]) (Fig. 2a). While estimated coefficients for pyrodiversity and severe fire overlapped zero when considered at the population-level (i.e., effect fixed across individuals), individual-specific coefficients showed a high degree of variability (Fig. 2b) that improved model fit (likelihood ratio tests; p < 0.001). Thus, while the mean effect of pyrodiversity at the population level was 0.49, the deviation from that effect varied significantly across individuals with an estimated variance of σ2 = 1.92 (individual coefficients ranged from − 1.2 to 2.9) (Fig. 2b). Likewise, while the mean effect of severe fire at the population-level was − 0.35, individual-specific deviations from that effect were considerable (σ2 = 2.49; individual coefficients ranged from − 3.4 to 2.8) (Fig. 2b).

Coefficient estimates from mixed-effects habitat selection functions. a Mean fixed-effects coefficients and their associated 95% confidence intervals. b The variance estimates for the individual slope coefficients (random effects), with effects that improved model fit (using likelihood ratio tests) indicated with an asterisk (*). the x-axis of b is truncated to a smaller range (0–8) for visualization, but note that the variance term for permeation distance was 58.9. Colors correspond with different covariate groups (see Table 1); yellow = pre-fire forest cover, dark blue = disturbance variables, turquoise = severe fire patch variables. (Color figure online)
Selection/avoidance of severely-burned areas by spotted owls appeared to be mediated by spatial characteristics of severe fire patches (stage two). Population-level (fixed) effects for patch size was negative (βpatchSize = − 0.74 [− 2.01, 0.54]) indicating spotted owls selected smaller patches of severely-burned forest, but the 95% confidence interval overlapped zero (Fig. 2a). Spotted owls selected severe fire patches with greater spatial complexity (higher perimeter-area ratio; βcomplexity = 1.70 [0.69, 2.71]) (Fig. 2a). The population-level effect of permeation distance was slightly positive (βpermeation = 0.21 [− 3.30, 3.72]) but confidence intervals widely overlapped zero (Fig. 2a). While their population-level coefficient estimates overlapped zero, both patch size and permeation distance showed significant variation among individuals; individual-specific coefficients improved model fit (likelihood ratio tests; p < 0.001). While the mean effect of severe fire patch size at the population level was − 0.74, the deviation from that effect varied significantly across individuals with an estimated variance of σ2 = 5.15 (individual coefficients ranged from − 4.22 to 5.4) (Fig. 2b). Likewise, while the mean effect of permeation distance (distance traveled into severe fire patch) at the population-level was 0.21, individual-specific deviations from that effect were considerable (σ2 = 8.0; individual coefficients ranged from − 5.3 to 28) (Fig. 2b).
The large variation in habitat selection coefficients among individual owls for severe fire (stage one), severe fire patch size (stage two), and permeation distance (stage two) was partially explained by differences in individual-level habitat availability, indicating an apparent functional response (FR). Habitat × availability interaction coefficients and 95% confidence intervals for these three variables did not overlap zero in stage three models testing for functional responses. Moreover, functional response curves identified thresholds in habitat availability at which point predicted individual coefficients changed sign from positive to negative (the point at which the fitted curve crosses zero; Fig. 3a–c). Individual spotted owls tended to select severely burned forest only when it represented a small proportion of their home range (< 0.05), but avoided severely burned forest when it was more prevalent (βsevere-FR = − 0.76 [− 1.33, − 0.19]) (Fig. 3a). Individual owls tended to select larger patches of severe fire when the area-weighted average patch size in their home range was smaller than ~ 115 ha, but selected smaller patches of severe fire when their home ranges were characterized by larger patches (βpatch-FR = − 9.39 [− 13.78, − 5.00]) (Fig. 3b). Owls also avoided making deep forays into severe fire patches when the average permeation distance in their home range exceeded 47 m, corresponding with larger patches on average (βpermeation-FR = − 28.17 [− 43.67, − 12.68]) (Fig. 3c). Figure 4 provides examples of spotted owls selecting smaller patches of severe fire (Fig. 4a, b), avoiding larger patches of severe fire (Fig. 4b, c), and using a large severe fire patch (unlogged snag forest) but only making short forays into it (Fig. 4c). There was no evidence for a functional response in habitat selection for pyrodiversity (βpermeation-FR = − 0.48 [− 2.15, 1.20]) (Fig. 3d).

Functional responses in habitat selection. a Severe fire, b patch size, c permeation distance, d pyrodiversity. The y-axes represent slope coefficient estimates for individual owls, and the x-axis represents average covariate conditions within an individual owl’s home range (b, c represent area-weighted means for patch-based covariates). Functional responses with 95% confidence intervals that did not overlap zero are depicted in red (a–c). Note that the y-axis is truncated in panel c for better visualization; there is one additional data point located at x = 11.1, y = 27.98. (Color figure online)

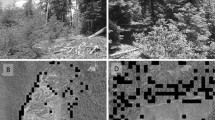
Examples of owl locations that show selection preferences across different availabilities of severe fire and patch sizes. a Selection for a small patch of severe fire; b, c avoidance of a large patch of severe fire; c also shows short (< 100 m) forays into a large severe fire patch. The fire area is shown in semitransparent white, high-severity fire with no salvage logging in red, salvage logging in blue, and owl locations as yellow “+” signs. (Color figure online)
Discussion
There is a natural hierarchical response by species that can be estimated following disturbance: a primary response and a secondary response. The primary response is whether an individual either survives or is able to remain (i.e., occupy) in the affected area following a disturbance event. The secondary response is conditional on the primary response (i.e., continued occupancy) and may represent shifts in movement, foraging, or reproductive behavior by persisting individuals that are induced by the disturbance. Key uncertainties exist regarding both primary and secondary responses by spotted owls to fire. With respect to primary responses, the 2014 King Fire displaced a significant portion of the population that experienced extensive severe fire and at least one apparent direct mortality (Jones et al. 2016), but other researchers reported no negative effects in a different population of owls that experienced a large, severe fire (Lee and Bond 2015, but see Berigan et al. 2019). With respect to secondary responses, different studies have revealed that GPS- or VHF-tagged owls avoided (Jones et al. 2016; Eyes et al. 2017), preferentially selected (Bond et al. 2009), or used severely burned forests in proportion to their availability (Bond et al. 2016) when foraging. The analytical approaches used in these studies were similar, raising the question of why owls apparently responded in different ways. We posit one of the reasons may be that these studies have lacked an explicit landscape perspective (i.e., role of spatial patterns of severe fire), which precluded the ability to disentangle different factors that might have led to these conflicting results. While previous work has advanced our understanding of the importance of edges between fire severity classes as a predictor of spotted owl habitat selection (Bond et al. 2009, 2016; Eyes et al. 2017) and the role of these edges across scales (Comfort et al. 2016), they did not explicitly consider the role of severe fire patch size, configuration, permeation distance, or how responses may be conditional on individual variation in habitat availability (i.e., functional response).
Owl response to high-severity fire
Landscape structure and composition following fires appear to affect habitat selection by spotted owls in a more nuanced way than previously reported. Although severe fire was not clearly avoided nor selected at the population level, individuals showed avoidance of severely burned forests (i.e., expected individual coefficients became negative) when > 5% of their home range burned at high-severity (Fig. 3a). Thus, for those owls not displaced or killed, severe fire appeared to be, on average, benign or beneficial below this threshold, yet appeared to affect owl movements above this threshold. Therefore, spotted owls continued to occupy home ranges in the short term when their home ranges were burned by up to 40% severe fire (the maximum extent experienced by GPS-tagged owls in this study), perhaps via behavioral plasticity including the shifting of foraging sites. However, previous work has shown that habitat loss related to severe fire occurring over > 50% of an owl territory led to territory abandonment and mortality (Jones et al. 2016). These thresholds could serve as benchmarks for understanding severe fire effects on spotted owls when detailed site occupancy and tagging information are not available, but we hypothesize that wildfires with different severe fire spatial patterns may result in different responses by owls than we report here. We observed similar functional responses for severe fire patch size and permeation distance; owls avoided using larger patches of severe fire and avoided making deeper forays into severely burned areas when their home ranges were characterized by a larger severe fire component. Had we used a more traditional analysis that did not account for individual variation and spatial configuration, and simply made inference about population-level effects, we would likely have concluded that owls use severely burned forests in proportion to its availability (i.e., the model from stage one). Instead, we gained a more nuanced understanding that patch size and the spatial extent and configuration of severely burned forests within individual spotted owl home ranges strongly mediated the effect of severe fire.
The specific thresholds at which we observed that spotted owls began to avoid severely burned forest appear to align closely with the best available estimates of historical severe fire extent and patch sizes within dry mixed-conifer forests (Safford and Stevens 2017). Specifically, fires that historically burned in yellow pine mixed-conifer forests in the Sierra Nevada contained 5–15% severe fire effects (Safford and Stevens 2017); our study suggested owls tended to avoid severely burned forest when more than 5% of their home range was affected. Moreover, historical severe fire patch sizes in yellow pine mixed-conifer forests in the Sierra Nevada typically ranged from 10 to 100 ha in size (Safford and Stevens 2017); we showed that spotted owls tended to avoid larger severe fire patches when the average patch size in their home range exceeded ~ 115 ha in size. In addition, the spatial complexity of severe fire patches has been decreasing in recent decades (Stevens et al. 2017); we showed that owls select more complex severe fire patches. We suggest these results provide evidence that owls are responding to severe fire in a way that reflects adaptation to historical fire regimes under which this species evolved. Our work suggests that increasingly novel fire conditions within this system—i.e., more severe fire characterized by patches that are larger and less complex—will negatively affect spotted owls.
There are several possible reasons why spotted owls avoided large patches of unlogged, severely burned forest. First, severe fire in the King Fire likely altered spotted owls’ prey communities either (i) indirectly by eliminating the understory and coarse woody debris important for key small mammal prey species such as woodrats (Neotoma spp.; Roberts 2017) in the short term, or (ii) directly through fire-related mortality. Although some dense brush cover regenerated within many severely burned patches 1–2 years post-fire that could potentially provide prey habitat, owls appeared to avoid large, severely burned patches throughout the three-year study, suggesting prey populations had not yet recovered. Second, perching structures in large tracts of severely burned forest may not provide adequate concealment for this “sit and wait” predator relative to forests with live trees and foliage structure (Gutiérrez et al. 1995; Ganey et al. 2017). Third, and related to the second reason, large fires create extensive open areas that provide habitat for avian predators of spotted owls such as great-horned owls (Bubo virginianus; Gutiérrez et al. 1995), which increases predation risk (Johnson 1992). Discriminating among these hypotheses will be challenging and require both small mammal and predator sampling. There is a fourth explanation for why spotted owls avoided large tracts of severely burned forest: severely burned forest contains a limiting resource (e.g., food) that is preferentially selected when it is scarce, but is relatively less important (and its use/availability ratio decreases) when it is abundant (Beyer et al. 2010; Aarts et al. 2013). Given our three above hypothesized mechanisms for avoidance of large severely burned areas we think this is relatively unlikely because rather than containing abundant resources, large severe fire patches appear to contain fewer food resources and more risks to owls.
Owl response to salvage logging
Salvage logging is a management practice that removes fire-killed or fire-affected trees with the primary intention of recouping economic value and reducing safety hazards in multi-use forests (Lindenmayer and Noss 2006). Salvage logging can affect post-fire forest conditions and ecosystem processes by altering post-fire biological communities (Thorn et al. 2018), increasing fire risk by leaving behind fine and coarse woody fuels (Donato et al. 2006), and reducing natural vegetative recovery (Lindenmayer et al. 2008). However, salvage logging is also being used as a tool for improving post-fire reforestation success in dry forest types of the western US (North et al. 2019) that face an increased risk of natural regeneration failure and conversion to non-forest ecosystems following large, high-severity fires (Welch et al. 2016; Shive et al. 2018; Wood and Jones 2019). Thus, there is strong practical interest among land managers to understand ways to reduce negative effects of salvage logging on species and communities of conservation concern, particularly the spotted owl (Peery et al. 2017).
Our results suggest that spotted owls tended to avoid areas that experienced salvage logging. However, interpreting the significant negative statistical effect of salvage was challenged by several considerations. First, 95% confidence intervals for the population-level severe fire effect (i.e., unlogged snag forest) overlapped the 95% confidence intervals for the salvage effect (Fig. 2)—suggesting that salvage and severe fire effects at the population level may have been similar. Second, salvage logging was often embedded within the very large patch of severely burned forest in the northern part of the King Fire that owls strongly avoided (e.g., Figs. 1, 4b, c) such that owls may have been predisposed to avoiding some salvage-logged areas. Third, salvage-logged areas were relatively rare within owl home ranges (average 3.4% of owl home range) compared to severely burned areas (14.5%), and rare cover types are subject to false negative error (Frair et al. 2010).
Nevertheless, our study may provide some important insights into the relative effects of salvage logging and severe fire on spotted owl habitat selection. While the population-level (fixed) effect of salvage logging was negative and numerically more negative than population-level effect of severe fire, the variance among individual-level effects for salvage logging was narrow (σ2 = 0.64) and not statistically different from zero, compared to the significant variance among individual-level effects for severe fire (σ2 = 2.49). These variances resulted in a narrow range of individual coefficients (ranging from − 1.6 to − 0.2) for salvage logging, compared to a wider range for severe fire individual coefficients (ranging from − 3.4 to 2.8) (Fig. 5). Thus, it appears that individual owls with relatively large high-severity burned areas within their home range tended to avoid these areas more strongly than any owls avoided salvage-logged areas (Fig. 3a). Conversely, owls with smaller areas of high-severity burned areas in their home ranges tended to select severely burned areas but still tended to avoid salvaged areas, notwithstanding the considerations discussed above.

Comparison of the population-level (red line) and individual-level (black dots) coefficients for salvage logging and severe fire (unlogged snag forest). (Color figure online)
Despite these uncertainties, our findings also have novel implications for post-fire forest management as it relates to species conservation. Specifically, the owls’ tendency to avoid large, but not necessarily small patches of severely burned forest and also avoid traversing into interior portions of larger patches (Figs. 3, 4) suggests that salvage logging within interior portions of larger patches may be less likely to affect spotted owls than salvage logging within small patches of severely burned forest. For example, of all spotted owl GPS locations, only 0.6% occurred further than 100 m into a severe fire patch. Stillman et al. (2019) showed that black-backed woodpeckers (Picoides arcticus), another focal management species in post-fire landscapes in the Sierra Nevada, tended to use areas of severely burned forest that were closer to patch edges and rarely traveled further than > 500-m into severe fire patches. Thus, salvage operations within the interior of large patches of severely burned patches may be less likely to impact both of these focal species. However, most (89%) of salvage logging within the King Fire perimeter occurred on private lands that often involved higher proportions of harvesting than is typical on national forests (i.e., patches of unlogged snag forest were often left intact within salvage-logged areas on national forests). This limited the inferences we could make about the effects of salvage logging on public lands. Nevertheless, retaining perch sites and snags, and/or creating habitats that promote the preferred prey species of spotted owls in areas that are salvage-logged (e.g., slash piles for woodrats; Innes et al. 2007), might encourage use of these areas by owls in the future.
Implications for dry forest restoration
The tendency of spotted owls to avoid large areas within their home ranges that burned at high-severity has implications for the management of seasonal dry forests within the range of this species. Our findings of avoidance by spotted owls of forests extensively modified by severe fire suggests that the reduction of large, severe fires (“megafires”; Stephens et al. 2014) such as the King Fire by restoring frequent fire regimes characterized by small patches of severe fire is likely to benefit both spotted owl populations and increase forest resilience. This comes with the caveat also supported by our results that salvage logging be judiciously applied particularly in areas where fires burn heterogeneously within occupied spotted owl home ranges, because owls tend to use smaller patches of severely burned forests and forage along edges of larger patches. Our study (i) supports the general premise that species conservation and forest ecosystem restoration objectives in the Sierra Nevada can be compatible (Scheller et al. 2011; Tempel et al. 2015; Jones et al. 2016; Jones 2019) and (ii) could help reconcile a conservation conflict pitting those promoting restoration of seasonal dry forests in parts of western North America against those interested in preserving old-growth trees and habitat for spotted owls (Redpath et al. 2013; Gutiérrez et al. 2017).
Data availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Aarts G, Fieberg J, Brasseur S, Matthiopoulos J (2013) Quantifying the effect of habitat availability on species distributions. J Anim Ecol 82:1135–1145
Abatzoglou JT, Williams AP (2016) Impact of anthropogenic climate change on wildfire across western US forests. Proc Natl Acad Sci 113:11770–11775
Amrhein V, Greenland S, McShane B (2019) Retire statistical significance. Nature 567:305–307
Berigan WJ, Jones GM, Whitmore SA, Gutiérrez RJ, Peery MZ (2019) Cryptic wide-ranging movements lead to upwardly biased occupancy in a territorial species. J Appl Ecol 56:470–480
Betts MG, Wolf C, Pfeifer M, Banks-Leite C, Arroyo-Rodríguez V, Ribeiro DB, Barlow J, Eigenbrod F, Faira D, Fletcher Jr RJ, Hadley AS, Hawes JE, Holt RD, Klingbeil B, Kormann U, Lens L, Levi T, Medina-Rangel GF, Melles SL, Mezger D, Morante-Filho JC, Orme CDL, Peres CA, Phalan BT, Pidgeon A, Possingham H, Ripple WJ, Slade EM, Somarriba E, Tobias JA, Tylianakis JM, Urbina-Cardona JN, Valente JJ, Watling JI, Wells K, Wearn OR, Wood E, Young R, Ewers RM (2019) Extinction filters mediate the global effects of habitat fragmentation on animals. Science 80(1239):1236–1239
Beyer HL, Haydon DT, Morales JM, Frair JL, Hebblewhite M, Mitchell M, Matthiopoulos J (2010) The interpretation of habitat preference metrics under use-availability desians. Philos Trans R Soc B 365:2245–2254
Bond ML, Bradley C, Lee DE (2016) Foraging habitat selection by California Spotted Owls after fire. J Wildl Manag. https://doi.org/10.1002/jwmg.21112
Bond W, Keeley J (2005) Fire as a global ‘herbivore’: the ecology and evolution of flammable ecosystems. Trends Ecol Evol 20:387–394
Bond ML, Lee DE, Siegel RB, Ward JP (2009) Habitat use and selection by California Spotted Owls in a postfire landscape. J Wildl Manag 73:1116–1124
Carey AB, Peeler KC (1995) Spotted owls: resource and space use in mosaic landscapes. J Raptor Res 29:223–239
Clavero M, Brotons L, Herrando S (2011) Bird community specialization, bird conservation and disturbance: the role of wildfires. J Anim Ecol 80:128–136
Collins BM, Fry DL, Lydersen JM, Everett R, Stephens SL (2017a) Impacts of different land management histories on forest change. Ecol Appl 27:2475–2486
Collins BM, Stevens JT, Miller JD, Stephens SL, Brown PM, North MP (2017b) Alternative characterization of forest fire regimes: incorporating spatial patterns. Landsc Ecol 32:1543–1552
Comfort EJ, Clark DA, Anthony RG, Bailey J, Betts MG (2016) Quantifying edges as gradients at multiple scales improves habitat selection models for northern spotted owl. Landsc Ecol 31:1227–1240
Diffenbaugh NS, Swain DL, Touma D (2015) Anthropogenic warming has increased drought risk in California. Proc Natl Acad Sci 112:3931–3936
Donato DC, Fontaine JB, Campbell JL, Robinson WD, Kauffman JB, Law BE (2006) Post-wildfire logging ginders regeneration and increases fire risk. Science 80:311–352
Duchesne T, Fortin D, Courbin N (2010) Mixed conditional logistic regression for habitat selection studies. J Anim Ecol 79:548–555
Elmqvist T, Folke C, Nyström M, Peterson G, Bengtsson J, Walker B, Norberg J (2003) Response diversity, ecosystem change, and resilience. Front Ecol Environ 1:488–492
Eyes SA, Roberts SL, Johnson MD (2017) California Spotted Owl (Strix occidentalis occidentalis) habitat use patterns in a burned landscape. Condor 119:1–15
Foster CN, Banks SC, Cary GJ, Johnson CN, Lindenmayer DB, Valentine LE (2020) Animals as agents in fire regimes. Trends Ecol Evol. https://doi.org/10.1016/j.tree.2020.01.002
Frair JL, Fieberg J, Hebblewhite M, Cagnacci F, DeCesare NJ, Pedrotti L (2010) Resolving issues of imprecise and habitat-biased locations in ecological analyses using GPS telemetry data. Philos Trans R Soc B 365:2187–2200
Franklin AB, Anderson DR, Gutiérrez RJ, Burnham KP (2000) Climate, habitat quality, and fitness in northern spotted owl populations in northwestern California. Ecol Monogr 70:539–590
Ganey JL, Wan HY, Cushman SA, Vojta CD (2017) Conflicting perspectives on spotted owls, wildfire, and forest restoration. Fire Ecol 13:146–165
Gillies CS, Hebblewhite M, Nielsen SE, Krawchuk MA, Aldridge CL, Frair JL, Saher DJ, Stevens CE, Jerde CL (2006) Application of random effects to the study of resource selection by animals. J Anim Ecol 75:887–898
Gutiérrez RJ, Cheng AS, Becker DR, Cashen S, Ganz D, Gunn J, Liquori M, Merrill A, Saah DS, Price W (2015) Legislated collaboration in a conservation conflict: a case study of the Quincy Library Group, California. In: Redpath S, Gutiérrez RJ, Wood K, Young JC (eds) Conflicts in conservation: navigating towards solutions. Cambridge University Press, Cambridge, pp 271–283
Gutiérrez RJ, Franklin AB, Lahaye WS (1995) Spotted owl (Strix occidentalis). In: Poole A, Gill F (eds) The birds of north America no 179: life histories for the 21st century. The Philadelphia Academy of Sciences, The American Ornithologists’ Union, Washington, DC
Gutiérrez RJ, Manley PN, Stine PA (2017) The California Spotted Owl: current state of knowledge. Pacific southwest research station GTR-254. USDA Forest Service, Albany
Harrison XA, Donaldson L, Correa-Cano ME, Evans J, Fisher DN, Goodwin CED, Robinson BS, Hodgson DJ, Inger R (2018) A brief introduction to mixed effects modelling and multi-model inference in ecology. PeerJ 6:e4794
Hebblewhite M, Merrill E (2008) Modelling wildlife-human relationships for social species with mixed-effects resource selection models. J Appl Ecol 45:834–844
Hooten MB, Johnson DS, McClintock BT, Morales JM (2017) Animal movement: statistical models for telemetry data. CRC Press, Boca Raton
Innes RJ, Van VDH, Kelt DA, Johnson ML, Wilson JA, Stine PA (2007) Habitat associations of dusky-footed woodrats (Neotoma fuscipes) in mixed-conifer forest of the northern Sierra Nevada. J Mammal 88:1523–1531
Johnson DH (1992) Spotted owls, great horned owls, and forest fragmentation in the central Oregon Cascades. Oregon State University, Corvallis
Johnstone JF, Allen CD, Franklin JF, Frelich LE, Harvey BJ, Higuera PE, Mack MC, Meentemeyer RK, Metz MR, Perry GLW, Schoennagel T, Turner MG (2016) Changing disturbance regimes, ecological memory, and forest resilience. Front Ecol Environ 14:369–378
Jones GM (2019) Fire, forest restoration, and spotted owl conservation in the Sierra Nevada. University of Wisconsin-Madison, Madison, CA
Jones GM, Gutiérrez RJ, Tempel DJ, Whitmore SA, Berigan WJ, Peery MZ (2016) Megafires: an emerging threat to old-forest species. Front Ecol Environ 14:300–306
Jones GM, Keane JJ, Gutiérrez RJ, Peery MZ (2018) Declining old-forest species as a legacy of large trees lost. Divers Distrib 24:341–351
Karr JR, Freemark KE (1985) Disturbance and vertebrates: an integrative perspective. In: Karr JR (ed) The ecology of natural disturbance and patch dynamics. Academic Press, Orlando, pp 153–168
Lee DE (2018) Spotted Owls and forest fire: a systematic review and meta-analysis of the evidence. Ecosphere 9:e02354
Lee DE, Bond ML (2015) Occupancy of California Spotted Owl sites following a large fire in the Sierra Nevada, California. Condor 117:228–236
Lindenmayer DB, Burton PJ, Franklin JF (2008) Salvage logging and its ecological consequences. Island Press, Washington, DC
Lindenmayer DB, Noss RF (2006) Salvage logging, ecosystem processes, and biodiversity conservation. Conserv Biol 20:949–958
Lytle DA (2001) Disturbance regimes and life-history evolution. Am Nat 157:525
Manly BFJ, McDonald LL, Thomas DL, McDonald TL, Erickson WP (2002) Resource selection by animals: statistical design and analysis for field studies, 2nd edn. Kluwer, New York
Matthiopoulos J, Hebblewhite M, Aarts G, Fieberg J (2011) Generalized functional responses for species distributions. Ecology 92:583–589
Miller JD, Quayle B (2015) Calibration and validation of immediate post-fire satellite-derived data to three severity metrics. Fire Ecol 11:12–30
Muff S, Signer J, Fieberg J (2020) Accounting for individual-specific variation in habitat-selection studies: efficient estimation of mixed-effects models using Bayesian or frequentist computation. J Anim Ecol 89:80–92
Mysterud A, Ims RA (1998) Functional responses in habitat use: availability influences relative use in trade-off situations. Ecology 79:1435–1441
North MP, Stevens JT, Greene DF, Coppoletta M, Knapp EE, Latimer AM, Restaino CM, Tompkins RE, Welch KR, York RA, Young DJN, Axelson JN, Buckley TN, Estes BL, Hager RN, Long JW, Meyer MD, Ostoja SM, Safford HD, Shive KL, Tubbesing CL, Vice H, Walsh D, Werner CM, Wyrsch P (2019) Tamm Review: Reforestation for resilience in dry western U.S. forests. For Ecol Manag 432:209–224
Ohmann JL, Gregory MJ (2002) Predictive mapping of forest composition and structure with direct gradient analysis and nearest-neighbor imputation in coastal Oregon, U.S.A. Can J For Res 32:725–741
Pausas JG, Parr CL (2018) Towards an understanding of the evolutionary role of fire in animals. Evol Ecol 32:113–125
Peery MZ, Jones GM, Gutiérrez RJ, Redpath SM, Franklin AB, Simberloff D, Turner MG, Radeloff VC, White GC (2019) The conundrum of agenda-driven science in conservation. Front Ecol Environ 17:80–82
Peery MZ, Manley PN, Stine PA, Stine PA, North MP (2017) Synthesis and interpretation of California Spotted Owl research within the context of public forest management. In: Gutiérrez RJ, Manley PN, Stine PA (eds) The California Spotted Owl: current state of knowledge. PSW-GTR-254. U.S. Department of Agriculture, Albany, pp 263–291
Redpath SM, Young J, Evely A, Adams WM, Sutherland WJ, Whitehouse A, Amar A, Lambert RA, Linnell JDC, Watt A, Gutiérrez RJ (2013) Understanding and managing conservation conflicts. Trends Ecol Evol 28:100–109
Roberts SL (2017) California Spotted Owl habitat characteristics and use. In: Gutiérrez RJ, Manley PN, Stine PA (eds) The California Spotted Owl: current state of knowledge. PSW-GTR-254. U.S. Department of Agriculture, Albany, pp 49–73
Rockweit JT, Franklin AB, Carlson PC (2017) Differential impacts of wildfire on the population dynamics of an old-forest species. Ecology 98:1574–1582
Rosenberg DK, McKelvey KS (1999) Estimation of habitat selection for central-place foraging animals. J Wildl Manag 63:1028–1038
Safford HD, Stevens JT (2017) Natural range of variation for yellow pine and mixed-conifer forests in the Sierra Nevada, Southern Cascades, and Modoc and Inyo National Forests, California, USA. PSW-GTR-256. U.S. Department of Agriculture, Albany
Scheller RM, Spencer WD, Rustigian-Romsos H, Syphard AD, Ward BC, Strittholt JR (2011) Using stochastic simulation to evaluate competing risks of wildfires and fuels management on an isolated forest carnivore. Landsc Ecol 26:1491–1504
Seidl R, Spies TA, Peterson DL, Stephens SL, Hicke JA (2016) Searching for resilience: Addressing the impacts of changing disturbance regimes on forest ecosystem services. J Appl Ecol 53:120–129
Seidl R, Thom D, Kautz M, Martin-Benito D, Peltoniemi M, Vacchiano G, Wild J, Ascoli D, Petr M, Honkaniemi J, Lexer MJ, Trotsiuk V, Mairota P, Svoboda M, Fabrika M, Nagel TA, Reyer CPO (2017) Forest disturbances under climate change. Nat Clim Chang 7:395–402
Shive KL, Preisler HK, Welch KR, Safford HD, Butz RJ, O'Hara KL, Stephens SL (2018) From the stand scale to the landscape scale: predicting the spatial patterns of forest regeneration after disturbance. Ecol Appl 28:1626–1639
Simberloff D (1987) The spotted owl fracas: mixing academic, applied, and political ecology. Ecology 68:766–772
Steel ZL, Safford HD, Viers JH (2015) The fire frequency-severity relationship and the legacy of fire suppression in California forests. Ecosphere 6:8
Stephens SL, Burrows N, Buyantuyev A, Gray RW, Keane RE, Kubian R, Liu S, Seijo F, Shu L, Tolhurst KG, van Wagtendonk JW (2014) Temperate and boreal forest mega-fires: characteristics and challenges. Front Ecol Environ 12:115–122
Stephens SL, Collins BM (2004) Fire regimes of mixed-conifer forests in the north-central Sierra Nevada at multiple spatial scales. Northwest Sci 78:12–23
Stephens SL, Kobziar LN, Collins BM, Davis R, Fulé PZ, Gaines W, Ganey J, Guldin JM, Hessburn PF, Hiers K, Hoagland S, Keane JJ, Masters RE, McKellar AE, Montague W, North MP, Spies TA (2019) Is fire “for the birds”? How two rare species influence fire management across the US. Front Ecol Environ. https://doi.org/10.1002/fee.2076
Stevens JT, Collins BM, Miller JD, North MP, Stephens SL (2017) Changing spatial patterns of stand-replacing fire in California conifer forests. For Ecol Manag 406:28–36
Stillman AN, Siegel RB, Wilkerson RL, Johnson M, Howell CA, Tingley MW (2019) Nest site selection and nest survival of Black-backed Woodpeckers after wildfire. Condor Ornithol Appl. https://doi.org/10.1093/condor/duz040
Tempel DJ, Gutiérrez RJ, Battles JJ, Fry DL, Su Y, Guo Q, Reetz MJ, Whitmore SA, Jones GM, Collins BM, Stephens SL, Kelly M, Berigan WJ, Peery MZ (2015) Evaluating short- and long-term impacts of fuels treatments and wildfire on an old-forest species. Ecosphere 6:261
Tempel DJ, Keane JJ, Gutiérrez RJ, Wolfe JD, Jones GM, Koltunov A, Ramirez CM, Berigan WJ, Gallagher CV, Munton TE, Shaklee PA, Whitmore SA, Peery MZ (2016) Meta-analysis of California Spotted Owl (Strix occidentalis occidentalis) territory occupancy in the Sierra Nevada: habitat associations and their implications for forest managment. Condor 118:747–765
Thorn S, Bässler C, Brandl R, Burton PJ, Cahall R, Campbell JL, Castro J, Choi C-Y, Cobb T, Donato DC, Durska E, Fontaine JB, Gauthier S, Hebert C, Hothorn T, Hutto RL, Lee E-J, Leverkus AB, Lindenmayer DB, Obrist MK, Rost J, Seibold S, Seidl R, Thom D, Waldron K, Wermelinger B, Winter M-B, Zmihorski M, Müller J (2018) Impacts of salvage logging on biodiversity: A meta-analysis. J Appl Ecol 55:279–289
Turner MG (2010) Disturbance and landscape dynamics in a changing world. Ecology 91:2833–2849
Turner MG, Gardner RH, O’Neill RV (2001) Landscape ecology in theory and practice: pattern and process. Springer, New York
Welch KR, Safford HD, Young TP (2016) Predicting conifer establishment post wildfire in mixed conifer forests of the North American Mediterranean-climate zone. Ecosphere 7:e01609
Westerling AL (2016) Increasing western US forest wildfire activity: sensitivity to changes in the timing of Spring. Philos Trans R Soc Lond B. https://doi.org/10.1098/rstb.2015.0178
Wood CM, Jones GM (2019) Framing management of social-ecological systems in terms of the cost of failure: the Sierra Nevada, USA as a case study. Environ Res Lett 14:105004
Zuur AF, Ieno EN, Walker NJ, Saveliev AA, Smith GM (2009) Mixed effects models and extensions in ecology with R. Springer, New York
Acknowledgements
We thank MG Betts and two anonymous reviewers for providing critical feedback that significantly improved the manuscript. K. N. Roberts and B. P. Dotters provided helpful comments on an earlier version of the paper about post-fire salvage logging on private lands. We thank the many technicians who collected data for this project, as well as staff at University of California-Berkeley Blodgett Forest Research Station who provided housing and office space during field seasons. The U.S. Forest Service, California Department of Fish and Wildlife, U.S. Fish and Wildlife Service, and The Nature Conservancy provided funding for this work.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Jones, G.M., Kramer, H.A., Whitmore, S.A. et al. Habitat selection by spotted owls after a megafire reflects their adaptation to historical frequent-fire regimes. Landscape Ecol 35, 1199–1213 (2020). https://doi.org/10.1007/s10980-020-01010-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10980-020-01010-y