
Abstract
Context
Natural resource extraction is expanding towards increasingly remote areas. Meanwhile, the sustainability of most ecosystem service (ES) supplies, which form a great part of the livelihoods, health and economy of inhabitants in remote regions, is threatened by large-scale land-use changes.
Objective
The aim of the study was to assess the consequences of postponing ES conservation planning in remote regions prone to industrial development. More specially, is there a development threshold at which ES conservation may be imperilled.
Methods
We simulated eight stages of development using actual data on hydroelectricity generation, forestry and mining expansion. Aiming to protect ten wetland’s ES provision, we assembled referential conservation networks prior to development and several alternative conservation solutions after each stage of development. We compared these networks and assessed the impact of land-use changes on the basic properties of ES conservation networks.
Results
We found that conservation network alternative solutions were more costly in terms of additional area needed to achieve all targets: up to 16 % more so, compared to referential networks. Past a certain stage of development, alternative solutions were composed of a significantly greater proportion of small sites and, consequently, the networks became much more fragmented. Development also changed the spatial configuration of networks: up to 66 % of the sites included in alternative solutions were not selected in the referential networks.
Conclusions
According to current trends, future development will strongly compete with ES conservation. Our study emphasizes the importance of implementing ES conservation actions before development, even in remote regions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Over recent decades, humans have modified ecosystems more rapidly and extensively than in any comparable period of time in human history (Foley et al. 2005; MA 2005; Tittensor et al. 2014). This process is driven by growing demand for food, fresh water, raw materials and energy, which all contribute to substantial short-term gains in human welfare (DeFries et al. 2004). In the long run however, the degradation of natural ecosystems undermines their capacity to provide vital ecosystem services (ES), with possible negative consequences for livelihoods, health and economy. The groups of people affected by local losses in ES supply often differ spatially (distant urban dwellers vs local populations) and temporally (current vs future generations) from those benefitting from land development (MA 2005; Kosmus et al. 2012). It is thus important to plan development projects to allow for both economic and social progress without infringing on the sustainability of ES supply or provoking negative impacts on the well-being of current and future local populations.
The scarcity of natural resources in proximity to densely populated areas is pushing the frontiers of development toward increasingly remote areas. For generations, logistical barriers of distance, transportation or even weather made remote regions less appealing for development, affording their ecosystems de facto natural protection (Foote and Krogman 2006). However, new technologies, the expansion of transportation networks and the world’s human population, coupled with economic growth, have altered expected cost-income ratios to favor development in these remote regions (Foote and Krogman 2006; Kramer et al. 2009). It is therefore of critical importance to intensify ES conservation efforts in remote regions, where, compared to urban dwellers, inhabitants tend to (1) experience a stronger link with ecosystems and (2) to draw a greater proportion of their necessities of life from surrounding ecosystems (McCauley et al. 2013). Some populations, often indigenous communities, are even directly dependent on the benefits they can derive from ecosystems, at least seasonally (Foote and Krogman 2006).
Systematic conservation planning (SCP), a multi-step operational approach to planning and implementation of conservation (Margules and Sarkar 2007), is increasingly recommended for safeguarding ES provision (Chan et al. 2006; Egoh et al. 2011; Cimon-Morin et al. 2013, 2014). SCP has notably been developed to identify priority areas and design conservation networks that make it possible to achieve conservation goals with the least cost or invested effort (i.e., cost-efficient; Margules and Sarkar 2007). Once priority areas for conservation have been identified, it is often assumed that they will be protected rapidly as such. In practice, conservation actions are made sequentially due to insufficient budgets, limited site availability, lack of political support, absence of responsible authorities or conflicts with stakeholders (Costello and Polasky 2004; Snyder et al. 2004; Strange et al. 2006; Sabbadin et al. 2007; Haight and Snyder 2009; Possingham et al. 2009; Schindler et al. 2011; Schapaugh and Tyre 2014). Accordingly, continued development brings uncertainties about future site availability, and the degradation (or even conversion) of previously identified priority areas may drive down their conservation value (Costello and Polasky 2004; Harrison et al. 2008). The effects of development generally translate into the loss of conservation opportunities and finding alternatives to compensate for the loss of priority areas generally involve a choice between sites that are either more costly or that have less ecological value (i.e., ES value; Cabeza and Moilanen 2006). When particular sites are forcibly included or excluded in conservation solutions, the change, either in biological or economic cost, from the optimal cost-efficient solution is referred as “replacement cost” (Cabeza and Moilanen 2006; Moilanen et al. 2009). Applied to the context of developing remote regions, it is possible that the availability of a great number of undisturbed or natural sites for conservation may provide a suitable alternative that may be particularly useful as a response to lost opportunities, and may ensure that the replacement cost for alternative conservation solutions remains in line with that of cost-efficient networks (Wilson et al. 2009). Contrary to biodiversity conservation, even minimal development could in fact have positive effects on the regional availability of ES. For example, as new roads connecting development projects to population centers are built, the increased access to the territory may make new ES supply accessible (Cimon-Morin et al. 2014). For these reasons, development thresholds associated with high replacement costs and with a decrease in the local availability of ES may be particularly hard to predict in remote regions.
While some conservationists argue that conservation funds should be allocated for regions where the rate of biodiversity loss is high, rather than for undeveloped remote regions where threats are low (Craigie et al. 2014), delaying conservation can have negative impacts in remote regions where resources exploitation is increasing. This issue has seldom been assessed for ES in remote regions and should remain a priority considering the rapid expansion of the exploitation range associated with many industries. We therefore conducted a modelling experiment in a remote region of northeastern Canada to assess the effect of development on conservation networks, notably by calculating replacement cost. This region of boreal eastern Canada is currently marginally disturbed, but its large freshwater reserves, commercial forest, important mineral and peat deposits, and rivers with great hydroelectric potential make it an ideal candidate for industrial development (Berteaux 2013). Specifically, our research question was: what are the consequences of postponing the identification of ES priority areas for conservation until later stages of development? Using novel ES systematic conservation planning approaches (Cimon-Morin et al. 2014, 2015a), we compared a referential conservation network established prior to development with networks established at different stages of simulated development scenarios. Networks were assembled to secure various target levels of ten ES provided by wetland ecosystems. We hypothesized that the replacement cost of ES conservation networks would increase proportionally with increasing development due to the loss of valuable sites for ES conservation.
Method
Study area
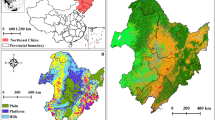
The study was undertaken in the Lower North-Shore Plateau ecoregion and in a southern portion of the Central Labrador ecoregion of boreal eastern Canada (Fig. 1; Li and Ducruc 1999). It extends over 137,565 km2 and has a population of approximately 12,350 inhabitants (0.09/km2) of which 9800 are dispersed across fifteen municipalities and 2550 are distributed in four First Nations communities (Gouvernement du Québec 2013). The minimal mapping unit of the Natural-Capital Inventory dataset (Ducruc 1985), originally compiled for ecological classification of the territory, was used to divide the study area into 16,026 planning units. The planning units are of irregular shape and size because they are delimited by significant and permanent environmental features, such as landscape topography, surface deposits and water bodies. Planning unit sizes ranged from 0.0009 to 580 km2, with a median of 3.8 km2 (mean of 8.5 ± 15 km2) and C10 and C90 respectively corresponding to 0.5 and 20.8 km2.

The location of the study area (darker area) in North America (a); the extent of road networks and the location of major towns, First Nations communities and vacation leases (b). The light grey shading (b) illustrates the major hydrological features present in the study area, such as large waterbodies, wide watercourses and the St. Lawrence River to the south
Assuming that various wetland and aquatic habitat types differ in their capacity to supply ES, it was decided to map 16 types, the largest number possible using the best available complete data. We used the Natural-Capital Inventory dataset (Ducruc 1985) to infer the relative coverage proportion of 11 wetland types, specifically 10 peatlands and one mineral wetland (including marshes and swamps). This dataset contains aggregated information on descriptive variables, such as surface deposits (e.g., organic or mineral), drainage and vegetation cover, at the planning unit scale. We differentiated four types of ombrotrophic peatlands (bogs) based on the presence of ombrotrophic organic deposits, peat depth (thick or thin; threshold of 1 m) and vegetation cover (forested or not). We also identified six minerotrophic peatlands (fens) among the minerotrophic organic deposits using peat depth (thick or thin; threshold of 1 m) and vegetation cover (forested or not and presence/absence of strings). Four types of aquatic habitats (streams, rivers, ponds and lakes) were extracted from the CanVec v8.0 dataset (NRC 2011). Lakes were further divided into shallow (littoral zones, <2 m deep) and deep water zones (pelagic zones) with a 100 m buffer from the shoreline (Lemelin and Darveau 2008). This division was based on the premise that these two types of habitats differ in their capacity to generate ES supply, notably for waterfowl related ES (Lemelin et al. 2010). Aquatic habitats were converted into relative coverage proportion for each planning unit. Freshwater wetlands, mostly peatlands, cover 10 % of the study area, while another 17 % is composed of freshwater aquatic habitats (the remaining 73 % being composed of different boreal terrestrial habitats). All mapping was performed using ArcGIS 10.0 (ESRI 2012).
Mapping ecosystem services
Mapping ecosystem services supply
Remote regions are great providers of important local to global flow scale ES for human populations (Schindler and Lee 2010; McCauley et al. 2013; Cimon-Morin et al. 2014). Based on the availability of spatial data, we selected ten wetland ES of either global significance or for which the local sustainability of supply is important, notably with regard to the livelihood of local communities and tourism-related activities: five provisioning, three cultural and two regulating services (Table 1). Seven have a local flow scale: moose and waterfowl hunting, salmon and trout angling, cloudberry picking, aesthetics and cultural site for First Nations subsistence uptake. From a conservation perspective, a local flow scale means that beneficiaries must approach or enter the protected area (where the ES is supplied) in order to obtain the service’s benefits. One selected ES, flood control, has a regional flow. Two ES have a more global importance: the existence value of woodland caribou (Rangifer tarandus caribou; i.e., an iconic species in Canada) and carbon storage. We mapped the biophysical supply (BS) of all ES quantitatively, taking into account the biophysical capacity of wetland types to provide an ES in each planning unit (for detailed methodology see Supplementary Materials; Cimon-Morin et al. 2014). Then, for the seven local and the single regional flow scale ES, we used proxies of human occupancy of the study area to refine maps of their BS in order to identify where these ES can provide benefits accessible to human populations, hereafter referred to as the potential-use supply of ES (PUS). PUS is a sub-set of the BS that is accessible to beneficiaries (Supplementary Figure S1). In other words, we associated each ES with the spatial flow scale at which it delivers benefits to beneficiaries (local, regional or global) and we used proxies of human occupancy (e.g., roads, vacation leases on Crown lands, outfitters, towns, etc.) to identify the set of planning units that deliver accessible benefits to humans.
More specifically, to identify the spatial range of ES potential-use supply, the following proxies of accessibility and of human occupancy were used for local flow ES (for cultural ES see Supplementary material and Table 1): (1) a 1 km buffer zone around all types of roads and human settlements, such as leases of vacation lots on public lands (mostly used for fishing- and hunting-related activities), and (2) the area occupied by outfitters offering the targeted ES. While these proxies may be a conservative estimate of planning unit accessibility, we believe that the majority of human uses for the targeted local flow ES will take place within these limits. Therefore, planning units that fall outside the spatial range of benefit delivery for an individual ES were considered to provide no accessible (or direct-use) benefits and were not considered for the conservation of this ES’ supply (i.e., the planning unit feature value was set to nil). For the sole regional flow scale ES, that is, flood control, only the planning units present in watersheds containing human infrastructures were retained in the PUS. For the two global flow ES, the BS and the PUS were identical.
Mapping ecosystem services demand
At the regional scale, assessing an ES demand quantitatively can provide information on the quantity of accessible supply that needs to be safeguarded (i.e., setting conservation targets). This can ensure that beneficiaries’ needs are met, while preventing the expenditure of unnecessary conservation resources on safeguarding a surplus of ES supply. Demand within the planning region can also be assessed at a finer scale in terms of the probability that a specific location be used or needed for the accessible provision of a particular service to a given set of beneficiaries. Quantitatively assessing the demand for ES in each planning unit is particularly useful to discriminate among and to prioritize sites providing accessible benefits to beneficiaries because (1) accessible benefits are not necessarily in demand and (2) sites with the highest supply are not necessarily those that are the most important in fulfilling beneficiary demand (Cimon-Morin et al. 2014, 2015a).
Accordingly, we mapped ES demand for each local flow ES quantitatively (Table 1 and Supplementary material) given that demand for these ES is spatially heterogeneous and tends to decrease with increasing distance from roads and population centres (Supplementary Figure S2; Chan et al. 2006; Holland et al. 2011). Demand for global flow ES was considered equal across their PUS range, since their demand is theoretically equal across their PUS spatial range (i.e., any selection of sites that protect a specific amount of supply will contribute equally to demand). For regional flow ES (i.e., flood control), the demand may vary according to human population density and the presence of human infrastructures (e.g., roads, bridges, etc.). However, we were not able to establish precise demand values for each watershed. For the purpose of this study, we assumed that demand for regional flow ES is also equal across the spatial range of their PUS. Demand for most local flow scale ES often involves the movement of their beneficiaries, who must get to the site where the ES is supplied in order to benefit from it. For moose hunting and salmon angling, primary data about demand was available. Demand for the other local flow ES was modeled using proxies of human usage, such as (1) a 30 km buffer zone to the nearest towns, (2) a 1 km buffer zone to vacation leases, and (3) the area occupied by outfitters. The 30 km distance from towns was preferred over a distance decay function because in this remote region people have good knowledge of the land and tend to repeatedly use specific spots for an ES. These proxies, as well as those used to map the PUS, are context-specific and were weighted for each ES specifically by previous social assessments and expert knowledge of human use of the territory (e.g., quantity of possible users and the permanency of use; Hydro-Québec 2007). For example, outfitters and vacation leases are strong predictors of demand for angling but are less predictive of wild fruit picking. Thus, a planning unit containing an outfitter and vacation leases will have a greater demand score for angling than a planning unit that does not contain these features.
The actual-use supply of ecosystem services
The actual-use supply of an ES is defined as accessible supply and demand occurring simultaneously at the same site. This definition follows from the assumption that a real contribution to human well-being is made not only when ES are supplied and the benefits are accessible, but also when a minimal demand is fulfilled. Safeguarding actual-use supply of an ES, notably by targeting both the potential-use supply and demand directly in site selection procedures, allows for more efficient ES conservation choices (Cimon-Morin et al. 2014, 2015a). For example, setting adequate conservation targets for moose potential-use supply should ensure the conservation of moose populations and habitats, while demand will ensure that moose are protected where they are also hunted by beneficiaries (Cimon-Morin et al. 2015a). Experts were consulted for both quantitative assessment and validation of supply and demand mapping for each ES.
Temporal flow of ecosystem services
When mapping ES provision, we integrated spatial considerations for ES flow. However, we did not consider temporal flows of ES provision and demand. We acknowledge that access to the territory will increase and the supply of some local flow ES may become accessible as new roads connect development projects to population centres; thus, expanding the spatial range of demand. To avoid overly complicating the conservation scenarios tested, we treated the supply and demand of local flow ES as static based on initial mapping.
Mapping future industrial development sites and development scenarios
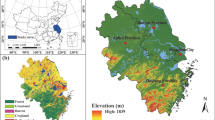
In the study area, there are four major types of industrial activities: (1) peat mining, (2) mineral mining, (3) forestry and (4) hydroelectric energy production (i.e., dams and reservoirs). While these industrial activities are already underway, they can be expected to expand in the coming years (Berteaux 2013). Therefore, we mapped the potential sites where future industrial development is likely to take place in the form of presence/absence of data at the planning unit scale (Fig. 2). We first gathered data on active peat (MRNF 2012a, b, c, personal communication) and mineral mining titles (MRN 2014) to identify the planning units in our study most susceptible to future mining industry development. We used forestry maps (MRNF 2012c) to identify productive stands (mostly coniferous, with some mixedwood stands) lying inside the forest management areas delimited in the study area (MRN 2003) and occurring on both wetland and terrestrial ecosystems. Currently, productive stands cover less than 10 % of the study area and less than 1 % of these stands have been subjected to forestry interventions (MRNF 2012c). Finally, we mapped the five hydroelectric projects that could be developed in the study area in the future (CRÉ 2010).

Sites where future development is most likely to occur for each type of industrial activity. (a) Planning units containing at least one active peat mining title. (b) Planning units containing at least one active metal mining title. (c) Planning units susceptible to forestry development. (d) Planning units where five potential hydroelectric projects may be developed. The sum of all industrial activities covers 17 % of the study area
We simulated eight intensities of development by selecting planning units prone to future development until various percentages of the study area were developed (i.e., 3, 5, 7, 9, 11, 13, 15 and 17 % of the study area). These eight thresholds may be interpreted as temporal development sequences (i.e., time scale), where 3 % may represent the first stage of development and 17 % the last stage; we stopped at 17 % simply because this is the greatest spatial extent of all four industrial activities combined that can be predicted given currently anticipated industry projects for the coming decades. To account for the uncertainty as to which particular set of sites would be developed, we carried out five different development simulations for each of the eight stages of development tested, except for a stage (17 %) that had only one possible simulation. We began our simulations by randomly choosing which hydroelectric projects would be considered for each sample and stage of development. The hydroelectric project called “Romaine” was considered automatically in each simulation since the construction of dams has already begun. Thus, at 3 % of development only one hydroelectric project was included (i.e., Romaine) while one to three projects were considered for stages between 5 and 9 % (i.e., Romaine and a random choice), and three to five projects were considered for those between 11 and 17 %. All sites belonging to a specific hydroelectric project were manually selected as a whole. Then, the simulation was run until the desired development stage was reached. This was accomplished by selecting new planning units from a combined map of peat mining, mineral mining and forestry development. In several planning units, there were often two or more overlapping industrial activities (Fig. 2), but it was impossible to predict which one would have priority or even exclusivity of exploitation considering current data. Therefore, in our development simulations, we only considered planning units as “subjected to development” or “not”, regardless of the number of industrial activities. Finally, although we considered development probability for each site independently from the status of neighboring sites (except for hydroelectric projects; see above), the fact that most future development sites are located in proximity to each other (see Fig. 2) incidentally resulted in the relatively contagious distribution of developed sites in our simulations. This is more representative of development, especially with regards to forestry.
Conservation software and scenarios
Conservation planning software
Conservation networks were assembled using C-Plan v4.0 conservation planning software (Pressey et al. 2009). The C-Plan site selection algorithm is primarily based on irreplaceability measures, defined as the likelihood that a given planning unit will need to be selected for efficient achievement of conservation objectives (Kukkala and Moilanen 2013). Irreplaceability measures of planning units generally vary according to target level, which is a quantitative measure of the minimal amount of each feature intended to be protected, and availability of targeted features. Targeted features were the ten ES potential-use supply and the demand of the seven local flow ES. Because no cost dataset was available for the study region, the area of the planning units (km2) was used as a proxy for cost (Naidoo et al. 2006) to identify the minimum set of sites that attain conservation targets for all features while minimizing the total cost (cost-efficiency; hereafter “cost” will refer to the area). For all conservation networks assembled, the minimization of area rule was used to choose between sites of equal irreplaceability (see below).
Conservation networks and analysis
We first assembled three reference conservation networks by identifying priority areas pre-dating any industrial development to secure 10, 25 and 40 % of both the ten ES potential-use supply and the demand of the seven local flow ES. Such an approach fosters the selection of ES actual-use supply, which is when the potential-use supply and demand for an ES occur simultaneously in the same planning unit (see “The actual-use supply of ecosystem services” section; Cimon-Morin et al. 2014). The three different quantitative targets tested account for the uncertainty concerning precisely how much ES supply and demand needs to be protected to enable their sustainability and actual demand fulfillment. Conservation targets greater than 40 % were not investigated, since this would have required more than 17 % of the study area covered by protected areas (PAs; see “Result” section). While this percentage of PAs would equal the percentage of terrestrial protected areas targeted for 2020 by the Convention on Biological Diversity (2014), it does not explicitly include biodiversity-oriented targets. This modelling decision does not preclude that much more protection could be required (Noss et al. 2012).
To include the effect of development, we reassembled conservation networks to secure the same quantitative ES targets, but this time, we began by excluding the planning units disturbed under the different development simulations from being available to be selected for conservation. Irreplaceability values for the remaining planning units were recalculated to account for the loss of ES supply and demand in developed planning units. Then, conservation networks were completed using the same algorithm as previously by selecting planning units that were still available either until targets were attained for all features or until no additional planning unit was contributing towards target achievement. Considering the five development simulations that were made for each development threshold (except for 17 %; see “Mapping future industrial development sites and development scenarios” section), five conservation networks were assembled per development threshold for each target level. In total, 37 conservation networks were assembled per target level; the referential one plus 36 following development (also referred to as alternative conservation solutions).
Analyses of conservation networks were carried out for each target level separately. We began our analysis by assessing the loss, in terms of number of planning units and area, incurred to the referential network due to development. In other words, we compared the planning units that were shared with the referential networks and the development simulations. This analysis may suggest a development threshold at which it will no longer be possible to assemble a conservation network similar to the referential ones. Then, we calculated the replacement cost of the conservation network by comparing the referential network (i.e., prior to development) with its alternative solutions (i.e., networks established at the different stages of development). In target-based conservation planning, replacement cost is measured as the changes in cost (or area) needed to achieve the targets after the exclusion of a site (or set of sites; Cabeza and Moilanen 2006; Kukkala and Moilanen 2013). Normally, reserve selection is a dynamic process that would last throughout the development temporal sequence. However, to answer our main research question, we assumed that each network identified following development simulations could be implemented as such. While this approach simplifies the site selection process, we believe that our results provide conservative lower bound estimates of the effect of development, notably on replacement costs. A replacement-cost value of zero means that there is an alternative solution with the same properties as the current cost-effective solution, i.e., one that achieves ES targets at the same cost. A replacement cost greater than zero means that any alternative solution excluding the sites subjected to development will have a greater cost than the referential network.
To better describe the effect of development on conservation networks, we decided to support our results by assessing the selection frequency of a planning unit based on its size. Therefore, the distribution of site sizes within the referential networks was compared to the distributions of site sizes within their alternative networks using a two-sample Kolmogorov–Smirnov test (Zar 2010) in R version 3.0.1 software (R Development Core Team 2013). The five network samples that were established per target level and per development stage were aggregated to form a unique distribution that was then compared to that of the referential network. Finally, we assessed the proportion of shared planning units between the referential networks and those established following development.
Results
The three referential networks assembled to secure 10, 25 and 40 % of ES actual-use supply took respectively 4405 km2 (3.2 % of the study area, 444 planning units), 12,216 km2 (8.8 % of the study area, 914 planning units) and 22,441 km2 (16.3 % of the study area, 1495 planning units) to reach targets. Surprisingly, all alternative conservation solutions also achieved their conservation targets, even at the maximal extent of development considered in our simulation (i.e., 17 % of the study area). Examples of conservation networks protecting the same quantitative target but established under different stages of development can be found in Fig. 3. As expected, all networks showed more or less aggregation of selected planning units in the southern part of the study area, where most human settlements are located (see Figs. 1, 3).

Example of conservation networks prior to development (a) and at three stages of development: 5 % (b), 11 % (c) and 15 % (d). Networks shown were established to secure a 10 % target for ten ES actual-use supply
We found that, even at 3 % of development, the direct loss incurred to the referential networks reached 4 % to 5 % of their planning units (Supplementary Figure S3A), depending on the target level. These lost planning units represented 5–9 % of the referential network area (Supplementary Figure 3B). While there was no evident development threshold at which losses rose faster, losses increased with development, reaching between 21 and 37 % of referential network planning units at the maximal tested development stage, corresponding to 45–53 % of their area.
Comparing the referential conservation networks with those established following development revealed major spatial discrepancies (Fig. 4). Depending on the target levels, only 48–70 % of the planning units of alternative conservation solutions were shared with the referential network at 3 % of development (Fig. 4). The proportion of shared planning units decreased with increasing development. When maximal development was considered, these proportions fell to between 33 and 37 %. As a result, implementing ES conservation after development greatly changed the final spatial configuration of the conservation networks. Moreover, the greater the conservation targets, the greater the proportion of planning units shared between selected networks for a fixed development stage. This is due to the fact that planning units lost to development (at each specific development stage) were the same for each target level and that networks with a higher target level required a greater number of planning units (and a greater area). Therefore, the probability that a particular planning unit from the referential networks would still be available and selected was greater for higher target levels.

The proportion of planning units that is shared with the referential network and the networks established following different stages of development. The proportions were calculated as a fraction of the total number of selected sites in the alternative solutions. The proportions are shown for the three ES conservation target levels, which are 10, 25 and 40 % of their actual-use supply. The bars represent the standard deviation calculated from the five network samples established for each target and development level
Delayed identification of priority areas also resulted in alternative solutions showing positive replacement cost. This meant that more area was required to achieve the same conservation targets (Fig. 5, circles). Measured as a deviation in the proportion of the referential network area, the replacement cost was greater for small conservation targets: reaching a maximum of 16 % (705 km2) for the 10 % target level. At the 40 % target level, the replacement cost remained more or less nil throughout development (i.e., below 1 %, <1800 km2). A surprising result was that instead of increasing with development, as expected, replacement cost decreased slightly with increasing development for the three target levels. In contrast, alternative conservation solutions were composed of fewer planning units than the referential networks at a low development threshold, but their number increased with development for the three target levels (Fig. 5, squares). At 25 and 40 % target levels, the number of selected planning units exceeded that of the referential networks at later stages of development.

Difference in total area and total number of planning units selected between the referential network and those established at different stages of development. Compared to the referential network, a positive deviation means that alternative networks had a greater features value, while a negative deviation indicates that alternative networks showed a lower features value. Deviation in total area refers to replacement cost. The replacement cost and the difference in the number of planning units are shown for the three ES conservation target levels, which are 10, 25 and 40 % of their actual-use supply. The bars represent the standard deviation calculated from the five network samples established for each target level and each percentage of industrial development. Total area for the 10, 25 and 40 % target referential networks equals 4405, 12,216 and 22,441 km2 respectively
Finally, to complement the replacement cost calculation, we assessed the effect of development on the size-distribution of selected planning units in the conservation network using a density function analysis. The analysis revealed that, at target levels of 10 and 25 %, alternative solutions at 5, 11 and 15 % of development differed significantly (p < 0.001) from their respective referential networks. At these target levels, alternative solutions contained fewer planning units, that on average larger than those of the referential network. At a conservation target level of 40 %, however, alternative solutions differed significantly (p < 0.001) from the referential network only after 11 % of development. Thus, above this development threshold, the difference was found in the number of small planning units, which was greater in the alternative solutions.
Discussion
Direct effects of development on ES conservation networks
Our results confirmed that there is considerable flexibility in finding alternative conservation solutions for remote regions prone to increasing industrial development and natural resource exploitation. Indeed, the three conservation targets that we tested were reached for all targeted features, even when simulated development was at a maximum. In densely-populated and fragmented landscapes, inclusion of most remaining areas might be needed to achieve conservation targets; as well, priority areas for restoration might need to be established in order to increase the supply of heavily disturbed ES to an adequate level. However, the low anthropogenic footprint generally characteristic of remote regions provides greater flexibility for designing conservation areas (Carwardine et al. 2009). In addition, target levels that were set in this study were not overly ambitious, but were rather realistic with regard to the regional availability of ES and the area needed to achieve them.
Despite the potentially greater design flexibility in remote regions, our results raise concerns about the consequences of delaying ES conservation. First, as expected, development caused the direct loss of a large proportion of ES priority areas that were initially (i.e., prior to development) identified for conservation. Such a situation makes it almost impossible to assemble conservation networks similar to the referential ones once development begins to expand. Second, at low conservation targets, delayed identification of priority areas increased the total costs of the conservation networks, while at higher conservation targets, it decreased the proportion of the replacement cost while increasing the fragmentation of the protected area network (i.e., several small planning units). These results highlight that priority areas lost to development were replaced by planning units that were either more costly or had less initial ecological value (Cabeza and Moilanen 2006). As a consequence, delaying ES conservation greatly changed the final spatial configuration of the network.
These findings are explained by the fact that each planning unit’s irreplaceability value is influenced by both the target level (i.e., the quantity of ES requiring safeguarding) and the stage of development (i.e., the regional availability of ES supply). Thus, increasing either or both of these two factors changed the irreplaceability of the planning units still available for conservation (Moilanen et al. 2009). At lower target levels or development thresholds, the irreplaceability value of larger planning units increased, as they tended to contain more of each ES feature and so became relatively more important for meeting targets. However, conservation solutions made up of larger planning units are generally less cost-efficient because large planning units are more likely to also contain superfluous sections (Nhancale and Smith 2011). At higher targets levels and development thresholds, more planning units began to share moderate to high irreplaceability values. As a result, the minimization-of-area (i.e., cost) rule in the site-selection algorithm, which was used to separate sites with equal irreplaceability values, was much more influential. As constraints on planning unit selection increased (i.e., target level and development threshold), losses were replaced by an increasing proportion of small planning units. Consequently, without changing any parameters, waiting until later stages of development to reserve land resulted in much more fragmented networks than when land was protected prior to development. As has previously been suggested, when (economic) costs dominate the reserve selection process, there is a risk of protecting unproductive, uninteresting and more distant locations (Sabbadin et al. 2007; Moilanen et al. 2009; Arponen et al. 2010). The most cost-efficient solution is generally sub-optimal from ecological and conservation perspectives. Cost-efficiency should, therefore, not be the only measure of conservation success (Arponen et al. 2010).
Our choice of ES influenced the results and the final spatial configuration of conservation networks, especially since we considered mostly local flow ES (i.e., 7 out of 10 ES). Their potential-use supply and demand are mostly spatially constrained to the vicinity of their beneficiaries (Cimon-Morin et al. 2014). Similarly, development often takes the form of a contagion process in which sites most likely to be developed are near sites that already have been developed. As a consequence, from the onset of development, alternative conservation networks and development competed for the same sites. Nevertheless, changing our ES sample or weighting their target differently could have yielded completely different conservation networks. As an example, conservation networks safeguarding regional to global flow ES may have been less constrained by development, notably at early stages. However, it remains that our selection of the ten ES was primarily based on their importance for maintaining the livelihood of study area beneficiaries.
Planning for the sustainability of ecosystem services
In this study, we found that delayed identification of priority areas may in itself increase the fragmentation of the reserve networks. The fragmentation of protected area networks may make the overriding objective of conservation, which is the persistence of the targeted biological features, unattainable (Margules and Pressey 2000; Margules and Sarkar 2007). Indeed, the effect of fragmentation is well documented for biodiversity: fragmentation decreases population size and ultimately increases the extinction risk for local populations (Fahrig 2003; Fischer and Lindenmayer 2007; Krauss et al. 2010). In addition, habitat loss outside protected areas that is caused by land-use change further increases the effect of fragmentation on conservation networks by decreasing the amount of suitable habitat within an appropriate distance of each protected area (DeFries et al. 2004, 2010; Foley et al. 2005; Hansen and DeFries 2007a; McDonald et al. 2009; Fahrig 2013; Hanski 2015). Yet, we do not fully understand how increased fragmentation may impact the efficacy of ES conservation networks and the fulfillment of demand (Mitchell et al. 2013). Fragmentation will most likely negatively affect service provision, either directly by restricting the rate of biotic (e.g., organisms) and matter (e.g., water) flows or indirectly by altering ecosystem functioning, which underpins ES provision (Cardinale et al. 2012; Mitchell et al. 2013). For particular services (e.g., carbon storage), once a minimal amount of supply or supportive habitat is secured, regardless of the conservation network configuration or lost initial priority areas, this may be sufficient to enable the sustainability of their benefits (Fahrig 2013). Other ES conservation might, however, be more affected by late conservation planning. It remains that few studies have examined whether it is better to protect ES actual-use supply with a network containing few large in-demand sites or one that has several smaller sites that are individually less in demand, but that can serve human populations scattered throughout the region.
Planning for the persistence and sustainability of ES requires further examination of conservation network design; especially with regard to maintaining ecological functions inside protected areas, while minimizing restrictions on human land use. In frontier landscapes, where logging and mining may be subjected to rapid expansion, there are great opportunities to identify critical habitats and corridors before they are converted (DeFries et al. 2007). These areas are either key functional source habitats, key process zones or migration corridors (Hansen and DeFries 2007a) that are important for sustaining ES provisioning inside protected areas. Critical habitats and corridors may be service specific and dependent upon the ecological level at which the service is produced (i.e., particular species, functional group, ecosystem type, biophysical setting, etc.). For instance, the critical habitat of a punctual local flow service, such as aesthetics, may already exist among the protected areas (i.e., a punctual biophysical setting). Yet, the critical habitat for local non-directional flow ES, such as moose hunting, may exist within the greater ecosystem surrounding the protected areas (e.g., source areas, migration corridors, etc.). Finally, local but directional flow ES, such as salmon angling, relies on upstream habitats. While this study focused solely on protecting the actual-use supply of ES, these zones should ideally be included in regional systematic conservation planning (Hansen and DeFries 2007a) or at the very least be managed in such a way that ensures their preservation. In the latter case, management actions should focus on maintaining effective ecosystem size, ecological process zones, crucial habitats for ES providers, which also occur outside protected areas (e.g., source habitats and migration corridors), and on minimizing negative human edge effects (Hansen and DeFries 2007a, b).
For the present study, we assumed that all priority areas identified at a specific stage of development could be immediately protected as such. In reality, however, reserve selection is a sequential decision-making process and it is impossible to protect all priority areas instantly given limited resources or site availability (Costello and Polasky 2004; Snyder et al. 2004; Haight and Snyder 2009; Schapaugh and Tyre 2014). Under these constraints, it is important for conservation practitioners to choose wisely which sites among those identified as priority areas should be protected first in order to maximize conservation outcomes. Reserve acquisition should prioritize areas subject to high development pressure (Wilson et al. 2005; Moilanen et al. 2009; Luck et al. 2012) because, as observed elsewhere, sites less vulnerable to immediate threats of conversion are likely to remain natural or in their current state for some time even if not formally protected (Strange et al. 2006; Sabbadin et al. 2007). Applied to ES conservation, and in certain situations, the most vulnerable sites may be those who safeguard local flow ES. Specifically, certain local flow ES have great site dependency. The latter is defined as the level of need for a particular service to be provided in a particular location in order to deliver benefits to a given set of beneficiaries (Luck et al. 2012). Thus, benefits obtained from the supply of certain local flow ES may not be replaceable elsewhere and, consequently, be classified as irreplaceable. Moreover, the conservation of local flow ES may compete more actively with development for land acquisition. Among local flow scale ES, sites that safeguard essential regulating and cultural services should be given priority because these categories of ES are the most sensitive to anthropogenic disturbances (Foley et al. 2005; Bennett et al. 2009) and more closely linked to the livelihood of beneficiaries. Finally, priority areas with a high demand score should also be given preference because they are particularly important for sustaining the delivery of ES benefits to a greater number of people.
Considering biodiversity and climate change
Biodiversity conservation is also a major concern in boreal Canada (Schindler and Lee 2010; Berteaux 2013; Venier et al. 2014). In the study area, it has previously been found that, prior to development, conservation targets for wetland biodiversity and for the same set of ES as those considered here could be simultaneously achieved, resulting in a mean increase of 6 % for required protected areas (Cimon-Morin et al. 2015b). However, the efficiency at which biodiversity and ES conservation could be aligned through overlapping conservation actions should decrease with increasing land-use change (or delayed conservation planning). Considering both biodiversity and ES in this study could have further highlighted the importance of early conservation planning. In addition, climate change is expected to induce a strong reorganization of abundance patterns and ranges of species (Berteaux et al. 2010, 2014) which could ultimately impact the local availability of ES provision. For example, because species redistributions are most likely to occur on a southwestern-northeastern axis following temperature gradients, current ES providers may be replaced or displaced further from their beneficiaries (Fig. 1). Future studies on conservation planning for ES should integrate the temporal dynamic of the ecological niche for each ES provider (i.e., species, functional group, habitat type) under climate change scenarios. This would allow the prediction of changes in local provision of ES that could impact the livelihood and economy of future populations in the study area.
Conclusion
Development pressures are pending in some remote regions and we showed that it could have major consequences on ES conservation. Development is most likely to begin near human populations and in locations closer to existing roads. At the same time, these sites are fairly important for the provision of an accessible supply of local flow ES and for the fulfillment of demand for these ES. In remote regions, elaborating a regional development and conservation plan that is ecologically, socially and politically optimized is less likely to be possible after development is underway. Thus, our results suggest that the effectiveness of late conservation planning should be treated with caution. Moreover, development will certainly expand beyond the thresholds simulated in this study. In such cases, late ES conservation actions will likely be relegated to even more remote areas and may eventually fail to provide any benefit, especially in terms of local flow ES, to local beneficiaries.
References
Arponen A, Cabeza M, Eklund J, Kujala H, Lehtomäki J (2010) Costs of integrating economics and conservation planning. Conserv Biol 24(5):1198–1204
Bellavance MF, Gagné J (2012) Cartographie des lacs sans poisson de la Minganie. Commission régionale sur les ressources naturelles et le territoire. Conférence régionale des élus de la Côte-Nord, Baie-Comeau
Bennett EM, Peterson GD, Gordon LJ (2009) Understanding relationships among multiple ecosystem services. Ecol Lett 12(1–11):1394–1404
Berteaux D (2013) Québec’s large-scale plan nord. Conserv Biol 27(2):242–247
Berteaux D, Blois Sd, Angers J-F, Bonin J, Casajus N, Darveau M, Fournier F, Humphries MM, McGill B, Larivée J, Logan T, Nantel P, Périé C, Poisson F, Rodrigue D, Rouleau S, Siron R, Thuiller W, Vescovi L (2010) The CC-bio project: studying the effects of climate change on Quebec biodiversity. Diversity 2(11):1181–1204
Berteaux D, Casajus N, de Blois S (2014) L’adaptation aux changements climatiques. In: Berteaux D, Casajus N, de Blois S (eds) Changements climatiques et biodiversité du Québec: vers un nouveau patrimoine naturel. Les Presses de l’Université du Québec, Québec, pp 117–141
Cabeza M, Moilanen A (2006) Replacement cost: a practical measure of site value for cost-effective reserve planning. Biol Conserv 132(3):336–342
Cardinale BJ, Duffy JE, Gonzalez A, Hooper DU, Perrings C, Venail P, Narwani A, Mace GM, Tilman D, Wardle DA, Kinzig AP, Daily GC, Loreau M, Grace JB, Larigauderie A, Srivastava DS, Naeem S (2012) Biodiversity loss and its impact on humanity. Nature 486(7401):59–67
Caron F, Fontaine P-M, Cauchon V (2006) État des stocks de saumon au Québec en 2005. Ministère des Ressources naturelles et de la Faune du Québec, Direction de la recherche sur la faune
Carwardine J, Klein CJ, Wilson KA, Pressey RL, Possingham HP (2009) Hitting the target and missing the point: target-based conservation planning in context. Conserv Lett 2(1):4–11
Chan KMA, Shaw MR, Cameron DR, Underwood EC, Daily GC (2006) Conservation planning for ecosystem services. PLoS Biol 4(11):2138–2152
Charest P (1996) Les stratégies de chasse des Mamit Inuat. Anthropologie et Sociétés 20:107–128
Charest P (2005) Chapitre 4—L’organisation socio-territoriale de la chasse. In: Charest P, Huot J, McNulty G (eds) Les Montagnais et la faune, 2ème edn. Université Laval, Québec, pp 235–353
Cimon-Morin J, Darveau M, Poulin M (2013) Fostering synergies between ecosystem services and biodiversity in conservation planning: a review. Biol Conserv 166:144–154
Cimon-Morin J, Darveau M, Poulin M (2014) Towards systematic conservation planning adapted to the local flow of ecosystem services. Glob Ecol Conserv 2:11–23
Cimon-Morin J, Darveau M, Poulin M (2015a) Conservation biogeography of ecosystem services. Reference module in earth systems and environmental sciences. Elsevier, Amsterdam. doi:10.1016/B978-0-12-409548-9.09205-8
Cimon-Morin J, Darveau M, Poulin M (2015b) Site complementarity between biodiversity and ecosystem services in conservation planning of sparsely-populated regions. Environ Conserv:1–13
Convention on Biological Diversity (2014) Strategic plan for biodiversity 2011-2020, including Aichi biodiversity targets. https://www.cbd.int/sp/targets/
Costello C, Polasky S (2004) Dynamic reserve site selection. Resour Energy Econ 26(2):157–174
Craigie ID, Pressey RL, Barnes M et al (2013) Remote regions—the last places where conservation efforts should be intensified. A reply to McCauley et al. (2013). Biol Conserv 172:221–222
CRÉ (2010) Portait, constats et enjeux des ressources naturelles du territoire de la Côte-Nord. Conférence régionale des élus de la Côte-Nord, Plan régional de développement intégré des ressources et du territoire
DeFries RS, Foley JA, Asner GP (2004) Land-use choices: balancing human needs and ecosystem function. Front Ecol Environ 2(5):249–257
DeFries R, Hansen A, Turner BL, Reid R, Liu J (2007) Land use change around protected areas: management to balance human needs and ecological function. Ecol Appl 17(4):1031–1038
DeFries R, Karanth KK, Pareeth S (2010) Interactions between protected areas and their surroundings in human-dominated tropical landscapes. Biol Conserv 143(12):2870–2880
Ducruc J-P (1985) L’analyse écologique du territoire au Québec: L’inventaire du capital-nature de la moyenne-et-basse-côte-nord. Environnement Québec—Environnement Canada—Hydro-Québec, Division des inventaires écologiques, Série de l’inventaire du capital-nature. Numéro 6
Egoh BN, Reyers B, Rouget M, Richardson DM (2011) Identifying priority areas for ecosystem service management in South African grasslands. J Environ Manag 92(6):1642–1650
Environment Canada (2008) Scientific review for the identification of critical habitat for woodland caribou (Rangifer tarandus caribou), B. P., in Canada. Environment Canada, Ottawa, Canada
Environmental Systems Research Institute Inc. (2012) ArcGIS 10.0. Redlands, USA
Fahrig L (2003) Effects of habitat fragmentation on biodiversity. Annu Rev Ecol Evol Syst 34:487–515
Fahrig L (2013) Rethinking patch size and isolation effects: the habitat amount hypothesis. J Biogeogr 40:1649–1663
Ferland ME, del Giorgio PA, Teodoru CR, Prairie YT (2012) Long-term C accumulation and total C stocks in boreal lakes in northern Quebec. Glob Biogeochem Cycles 26
Fischer J, Lindenmayer DB (2007) Landscape modification and habitat fragmentation: a synthesis. Glob Ecol Biogeogr 16(3):265–280
Foley JA, DeFries R, Asner GP, Barford C, Bonan G, Carpenter SR, Chapin FS, Coe MT, Daily GC, Gibbs HK, Helkowski JH, Holloway T, Howard EA, Kucharik CJ, Monfreda C, Patz JA, Prentice IC, Ramankutty N, Snyder PK (2005) Global consequences of land use. Science 309(5734):570–574
Foote L, Krogman N (2006) Wetlands in Canada’s western boreal forest: agents of change. For Chron 82(6):825–833
Gouvernement du Québec (1993) Hydrologie. Manuel de conception de ponceaux. Gouvernement du Québec, Ministère des Transports, direction des structures, service de l’hydraulique
Gouvernement du Québec (2013) Région 09: Côte-Nord. MRC et agglomérations ou municipalités locales exerçant certaines compétences de MRC. Ministère des affaire municipales, régions et occupation du territoire. Direction de la géomatique et de la statistique. http://www.mamrot.gouv.qc.ca/pub/organisation_municipale/cartotheque/Region_09.pdf
Guérette Montminy A, Berthiaume E, Darveau M, Cumming S, Bordage D, Lapointe S, Lemelin LV (2009) Répartition de la sauvagine en période de nidification entre les 510 et 580 de latitude nord dans la province de Québec. Canards Illimités Canada—Québec, Rapport technique no Q14, Québec
Haight RG, Snyder SA (2009) Integer programming methods for reserve selection and design. In: Moilanen A, Wilson KA, Possingham HP (eds), Spatial conservation prioritization. Oxford University Press, Oxford, pp 43–57
Hansen AJ, DeFries R (2007a) Ecological mechanisms linking protected areas to surrounding lands. Ecol Appl 17(4):974–988
Hansen AJ, DeFries R (2007b) Land use change around nature reserves: implications for sustaining biodiversity. Ecol Appl 17(4):972–973
Hanski I (2015) Habitat fragmentation and species richness. J Biogeogr 42:989–994
Harrison P, Spring D, MacKenzie M, Mac Nally R (2008) Dynamic reserve design with the union-find algorithm. Ecol Model 215(4):369–376
Holland RA, Eigenbrod F, Armsworth PR, Anderson BJ, Thomas CD, Heinemeyer A, Gillings S, Roy DB, Gaston KJ (2011) Spatial covariation between freshwater and terrestrial ecosystem services. Ecol Appl 21(6):2034–2048
Horwath WR (2007) Carbon cycling and formation of soil organic matter. In: Paul EA (ed) Soil microbiology, ecology and biochemistry. Academic Press, New York, pp 303–390
Hydro-Québec (2007) Complexe de la Romaine—Étude d’impact sur l’environnement. Hydro-Québec Équipement et Hydro-Québec Production. http://www.hydroquebec.com/romaine/documents/etude.html
Kosmus M, Renner I, Ullrich S (2012) Integrating ecosystem services into development planning: A stepwise approach for practitioners based on the TEEB approach. Federal Ministry for Economic Cooperation and Development, Eschborn, Germany
Kramer DB, Urquhart G, Schmitt K (2009) Globalization and the connection of remote communities: a review of household effects and their biodiversity implications. Ecol Econ 68(12):2897–2909
Krauss J, Bommarco R, Guardiola M, Heikkinen RK, Helm A, Kuussaari M, Lindborg R, Ockinger E, Partel M, Pino J, Poyry J, Raatikainen KM, Sang A, Stefanescu C, Teder T, Zobel M, Steffan-Dewenter I (2010) Habitat fragmentation causes immediate and time-delayed biodiversity loss at different trophic levels. Ecol Lett 13(5):597–605
Kukkala AS, Moilanen A (2013) Core concepts of spatial prioritisation in systematic conservation planning. Biol Rev 88(2):443–464
Lamontagne G, Lefort S (2004) Plan de gestion de l’orignal 2004–2010. Ministère des Ressources naturelles, de la Faune et des Parcs du Québec, Québec
Lemelin LV, Darveau M (2008) Les milieux humides du parc national du Canada de la Mauricie: cartographie en vue d’une surveillance de l’intégrité écologique. Ducks Unlimited Canada, Québec
Lemelin LV, Bordage D, Darveau M, Lepage C (2004) Répartition de la sauvagine et d’autres oiseaux utilisant les milieux aquatiques en période de nidification dans le Québec forestier. Environnement Canada, Service canadien de la faune, Série de rapports techniques no422, Sainte-Foy
Lemelin LV, Darveau M, Imbeau L, Bordage D (2010) Wetland use and selection by breeding waterbirds in the boreal forest of Quebec, Canada. Wetlands 30:321–332
Li T, Ducruc J-P (1999) Les provinces naturelles. Niveau I du cadre écologique de référence du Québec. Ministère de l’Environnement. http://www.mddefp.gouv.qc.ca/biodiversite/aires_protegees/provinces/index.htm
Luck GW, Chan KM, Klien CJ (2012) Identifying spatial priorities for protecting ecosystem services. F1000Research 2012, 1:17
Magnan G, Garneau M, Payette S (2011) Paleohydrology and long-term carbon dynamics in the ombrotrophic peatlands of the North Shore of the Saint-Lawrence, Northeastern Québec. International Symposium on Responsible Peatland Management and Growing Media Production, Québec, Canada
Margules CR, Pressey RL (2000) Systematic conservation planning. Nature 405:243–253
Margules CR, Sarkar S (2007) Systematic conservation planning. Cambridge University Press, Cambridge
McCauley DJ, Power EA, Bird DW, McInturff A, Dunbar RB, Durham WH, Micheli F, Young HS (2013) Conservation at the edges of the world. Biol Conserv 165:139–145
McDonald RI, Forman RTT, Kareiva P, Neugarten R, Salzer D, Fisher J (2009) Urban effects, distance, and protected areas in an urbanizing world. Landsc Urban Plan 93(1):63–75
Millennium Ecosystem Assessment (MA) (2005) Ecosystems and human well-being: synthesis. Island Press, Washington, DC
Mitchell ME, Bennett E, Gonzalez A (2013) Linking landscape connectivity and ecosystem service provision: current knowledge and research gaps. Ecosystems 16(5):894–908
Moilanen A, Arponen A, Stokland JN, Cabeza M (2009) Assessing replacement cost of conservation areas: how does habitat loss influence priorities? Biol Conserv 142(3):575–585
MRN (2003) Délimitation officielle des unités d’aménagement forestier de la Côte-Nord, Québec. Ministère des Ressources naturelles du Québec. https://www.mrn.gouv.qc.ca/publications/forets/consultation/region-09.pdf
MRN (2014) Mining rights digital data. Ministère des Ressources naturelles, Direction générale de la gestion du milieu minier, Québec. http://gestim.mines.gouv.qc.ca/ftp//cartes/caste_50000.asp
MRNF (2012a) Bilan de l’exploitation du saumon au Québec 2011. Ministère des Ressources naturelles et de la Faune, Secteur Faune Québec, Secteur des opérations régionales
MRNF (2012b) La pêche sportive au Québec—Périodes, limites et exceptions—Zone 19 sud. Ministère des Ressources Naturelles et de la Faune
MRNF (2012c) Données numériques écoforestière du Québec (4e programme d’inventaire forestier). Ministère des Ressources naturelles et Faune du Québec, Direction des inventaires forestiers, Québec
Naidoo R, Balmford A, Ferraro PJ, Polasky S, Ricketts TH, Rouget M (2006) Integrating economic costs into conservation planning. Trends Ecol Evol 21(12):681–687
Natural Resources Canada (NRC) (2011) CanVec v8.0. Natural Resources Canada, Earth Science Sector, Centre for Topographic Information. Available online via Géogratis: http://geogratis.cgdi.gc.ca/geogratis/fr/collection/5460AA9D-54CD-8349-C95E−1A4D03172FDF.html
Nhancale BA, Smith RJ (2011) The influence of planning unit characteristics on the efficiency and spatial pattern of systematic conservation planning assessments. Biodivers Conserv 20(8):1821–1835
Noss RF, Dobson AP, Baldwin R, Beier P, Davis CR, Dellasala DA, Francis J, Locke H, Nowak K, Lopez R, Reining C, Trombulak SC, Tabor G (2012) Bolder thinking for conservation. Conserv Biol 26:1–4
Pâquet J (1997) Analyses du paysage visuel. In: Bissonnette J, Gerardin V, Pâquet J (eds), Application de la cartographie écologique à quelques éléments de la gestion forestière. Ministère de l’Environnement et de la Faune du Québec, Direction de la conservation et du patrimoine écologique Québec
Pâquet J (2003) Outil d’aide à la décision pour classifier les secteurs d’intérêt majeurs et définir les stratégies d’aménagement pour l’intégration visuelle des coupes dans les paysages—Objectif de protection ou de mise en valeur des ressources du milieu forestier visant le maintien de la qualité visuelle des paysages forestiers. Ministère des Ressources Naturelles, de la Faune et des Parcs du Québec, Direction des programmes forestiers
Pâquet J, Bélanger L (1998) Stratégie d’aménagement pour l’intégration visuelle des coupes dans les paysages. Réalisé par C.A.P. Naturels dans le cadre du «Programme de mise en valeur des ressources du milieu forestier» du ministère des Ressources naturelles, Charlesbourg
Possingham HP, Moilanen A, Wilson KA (2009) Accounting for habitat dynamics in conservation planning. In: Moilanen A, Wilson KA, Possingham HP (eds) Spatial conservation prioritization. Oxford University Press, Oxford, pp 135–144
Pressey RL, Watts ME, Barrett TW, Ridges MJ (2009) The C-Plan conservation planning system: origins, applications, and possible futures. In: Moilanen A, Wilson KA, Possingham HP (eds) Spatial conservation prioritization. Oxford University Press, Oxford, pp 211–234
R Development Core Team (2013) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria. http://www.R-project.org
Sabbadin R, Spring D, Rabier CE (2007) Dynamic reserve site selection under contagion risk of deforestation. Ecol Model 201:75–81
Schapaugh AW, Tyre AJ (2014) Maximizing a new quantity in sequential reserve selection. Environ Conserv 41(2):198–205
Schindler DW, Lee PG (2010) Comprehensive conservation planning to protect biodiversity and ecosystem services in Canadian boreal regions under a warming climate and increasing exploitation. Biol Conserv 143(7):1571–1586
Schindler S, Curado N, Nikolov SC, Kret E, Cárcamo B, Catsadorakis G, Poirazidis K, Wrbka T, Kati V (2011) From research to implementation: nature conservation in the Eastern Rhodopes mountains (Greece and Bulgaria), European Green Belt. J Nat Conserv 19(4):193–201
Snyder SA, Haight RG, ReVelle CS (2004) Scenario optimization model for dynamic reserve site selection. Environ Model Assess 9(3):179–187
Strange N, Thorsen BJ, Bladt J (2006) Optimal reserve selection in a dynamic world. Biol Conserv 131(1):33–41
Tarnocai C, Lacelle B (1996) Soil organic carbon digital database of Canada. Eastern Cereal and Oilseed Research Center, Research Branch, Agriculture and Agri-Food Canada, Ottawa, Canada
Tecsult (2006) Raccordement du complexe de la Romaine—Étude des populations de caribous et d’orignaux. Rapport final présenté à Hydro-Québec Équipement. Pagination multiple + annexes
Timmermann HR, McNicol JG (1988) Moose habitat needs. For Chron 64(3):238–245
Tittensor DP, Walpole M, Hill SLL, Boyce DG, Britten GL, Burgess ND, Butchart SHM, Leadley PW, Regan EC, Alkemade R, Baumung R, Bellard C, Bouwman L, Bowles-Newark NJ, Chenery AM, Cheung WWL, Christensen V, Cooper HD, Crowther AR, Dixon MJR, Galli A, Gaveau V, Gregory RD, Gutierrez NL, Hirsch TL, Hoft R, Januchowski-Hartley SR, Karmann M, Krug CB, Leverington FJ, Loh J, Lojenga RK, Malsch K, Marques A, Morgan DHW, Mumby PJ, Newbold T, Noonan-Mooney K, Pagad SN, Parks BC, Pereira HM, Robertson T, Rondinini C, Santini L, Scharlemann JPW, Schindler S, Sumaila UR, Teh LSL, van Kolck J, Visconti P, Ye YM (2014) A mid-term analysis of progress toward international biodiversity targets. Science 346(6206):241–244
Venier LA, Thompson ID, Fleming R, Malcolm J, Aubin I, Trofymow JA, Langor D, Sturrock R, Patry C, Outerbridge RO, Holmes SB, Haeussler S, De Grandpre L, Chen HYH, Bayne E, Arsenault A, Brandt JP (2014) Effects of natural resource development on the terrestrial biodiversity of Canadian boreal forests. Environ Rev 22(4):457–490
Walsh G (2005) Chapitre 5—La récolte faunique. In: Charest P, Huot J, McNulty G (eds), Les Montagnais et la faune, 2ème edn. Université Laval, Sainte-Foy, Québec, pp 355–422
Wilson KA, Pressey RL, Newton AN, Burgman MA, Possingham HP, Weston CJ (2005) Measuring and incorporating vulnerability into conservation planning. Environ Manage 35:527–543
Wilson KA, Cabeza M, Klein AM (2009) Fundamental concepts of spatial conservation prioritization. In: Moilanen A, Wilson KA, Possingham HP (eds) spatial conservation prioritization. Oxford University Press, Oxford, pp 16–27
Zar JH (2010) Biostatistical analysis. Pearson, Upper Saddle River
Acknowledgments
We would like to thank our major project partners for their financial and technical support: Ducks Unlimited Canada; Laval University; the Ministry of Sustainable Development, Environment, Wildlife and Parks (MDDEFP; Isabelle Falardeau); Hydro-Québec (Louise Émond and Stéphane Lapointe); Quebec Research Funds for Nature and Technology (FRQNT); and the Natural Sciences and Engineering Research Council of Canada (NSERC; BMP and Mitacs accelerate grants to JCM and Discovery grant to MP; RGPIN-2014-05663).We wish to thank Karen Grislis and Selena Romein for the stylistic revision of this manuscript, Stéphanie Boudreau and Stéphane Bergeron for their input at early stages of the project, and two anonymous reviewers for their helpful comments.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Cimon-Morin, J., Darveau, M. & Poulin, M. Consequences of delaying conservation of ecosystem services in remote landscapes prone to natural resource exploitation. Landscape Ecol 31, 825–842 (2016). https://doi.org/10.1007/s10980-015-0291-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10980-015-0291-4