
Abstract
Seagrasses, which form critical subtidal habitats for marine organisms worldwide, are fragmented via natural processes but are increasingly being fragmented and degraded by boating, fishing, and coastal development. We constructed an individual-based model to test how habitat fragmentation and loss influenced predator–prey interactions and cohort size for a group of settling juvenile blue crabs (Callinectes sapidus Rathbun) in seagrass landscapes. Using results from field studies suggesting that strong top-down processes influence the relationship between cannibalistic blue crab populations and seagrass landscape structure, we constructed a model in which prey (juvenile blue crabs) are eaten by mesopredators (larger blue crabs) which in turn are eaten by top-level predators (e.g., large fishes). In our model, we varied the following parameters within four increasingly fragmented seagrass landscapes to test for their relative effects on cohort size: juvenile blue crab (prey) predator avoidance response, hunting ability of mesopredators and predators, the presence of a top-level predator, and prey settlement routines. Generally, prey cohort size was maximized in the presence of top-level predators and when mesopredators and predators exhibited random searching behavior vs. directed hunting. Cohort size for stationary (tethered) prey was maximized in fragmented landscapes, which corresponds to results from field experiments, whereas mobile prey able to detect and avoid predators had higher survival in continuous landscapes. Prey settlement patterns had relatively small influences on cohort size. We conclude that the effects of seagrass fragmentation and loss on organisms such as blue crabs will depend heavily on behaviors of prey and predatory organisms and how these behaviors change with landscape structure.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Seagrasses, of which there are ca. 50 species worldwide, form fragmented, subtidal landscapes along coastal and estuarine shorelines throughout the world (Robbins and Bell 1994; Hemminga and Duarte 2000). By forming productive, structurally complex habitats in otherwise unstructured marine soft sediments, seagrasses serve as critical refuge and foraging areas for the postlarvae, juveniles, and adults of many species (e.g., crabs: Perkins-Visser et al. 1996; Pile et al. 1996; shrimp: Murphey and Fonseca 1995; bivalves: Peterson 1986; Bologna and Heck 1999; fishes: Jenkins et al. 1998) and seagrasses therefore are classified as essential fish habitat by many federal and state management agencies. Seagrasses also promote biodiversity by harboring diverse epifaunal and infaunal assemblages among blades, roots, and rhizomes.
Seagrass coverage generally has declined worldwide due primarily to increased estuarine nutrient enrichment and suspended sediment loads associated with human population growth along coastlines (Orth and Moore 1988; Fonseca et al. 1998). At smaller scales (i.e. within seagrass meadows), waves and currents (Fonseca and Bell 1998), bioturbation (Townsend and Fonseca 1998), and the actions of humans (e.g., propeller scarring, trampling, and vessel groundings: Sargent et al. 1995; Eckrich and Holmquist 2000; Bell et al. 2001; Uhrin and Holmquist 2003) fragment continuous stands of seagrass into discrete patches of various sizes and shapes, making seagrass habitat an aquatic analogue to many fragmented terrestrial landscapes (Robbins and Bell 1994). Differences in organismal survival (Irlandi et al. 1995), density (Eggleston et al. 1998), and diversity (Eggleston et al. 1999; Healey and Hovel 2004) are evident among patch sizes varying by as little as several square meters, allowing seagrass habitats to serve as a convenient experimental model system (EMS) in which to test landscape ecology theory.
As in fragmented terrestrial habitats, landscape structure can strongly influence predator–prey relationships in seagrasses. Relative survival of epifaunal and infaunal organisms varies with seagrass patch size (Irlandi 1997; Hovel and Lipcius 2001; Hovel 2003), proportional cover (Irlandi et al. 1995; Hovel 2003), and patch isolation (Micheli and Peterson 1999). However, several aspects of seagrass habitat, and the methodology typically used to measure prey mortality rates, limit our knowledge of the effects of seagrass habitat fragmentation and loss on prey survival. First, as in most fragmented habitat types, covariation of landscape cover and aspects of landscape configuration (e.g., patch size and isolation) make it difficult to single out which aspects of landscape structure may have the largest influence on predator–prey interactions. A second complication is that seagrass habitat structure at fine scales (i.e. structural complexity), which strongly influences prey survival (Heck and Thoman 1981; Wilson et al. 1987; Schulman 1996; Hovel and Lipcius 2001; see reviews by Heck and Crowder 1991; Orth 1992) often covaries with seagrass patch size and proportional cover (Irlandi 1997; Hovel and Lipcius 2002). Thus, aspects of habitat structure at different scales in naturally occurring seagrass habitat may jointly influence prey survival.
A third major limitation in evaluating the influence of landscape structure on predator–prey relationships in seagrass is the fact that tethering nearly always is used to measure relative rates of survival within and among habitat types and landscapes (e.g., Heck and Thoman 1981; Wilson et al. 1987; Pile et al. 1996; Ryer et al. 1997; Lipcius et al. 1998; Heck et al. 2001; Hovel and Lipcius 2001; Eggleston et al. 2005; Hovel and Fonseca 2005). In this technique, prey typically are tethered by leashing organisms to ca. 5–50 cm strands of monofilament line or some other strong material, and attaching the line to the substratum. Tethering restricts all but very fine-scale prey movement and behavior, and therefore results in inflated estimates of prey mortality by limiting the ability of prey to respond to predator presence (Peterson and Black 1994; Zimmer-Faust et al. 1994). For tethering to accurately estimate relative rates of prey mortality among treatments, there must be no treatment-specific bias due to the technique (Peterson and Black 1994). While some studies suggest that tethering does not bias estimates of prey mortality among structural complexity treatments (e.g., different levels of seagrass shoot density: Pile et al. 1996; Hovel and Lipcius 2001), no studies have addressed whether tethering may bias estimates of prey mortality among landscape structure treatments (e.g., patch sizes, or different levels of proportional cover).
We created a spatially explicit, individual-based model (IBM) to investigate how seagrass habitat fragmentation and loss (in the absence of differences in structural complexity among fragmentation types), prey mobility (tethered vs. mobile), and prey and predator behavior influence the outcome of predator–prey interactions in seagrass landscapes. Within seagrass landscapes, patterns of prey and predator movement and the foraging behavior of predators are largely unknown (but see Darcy and Eggleston 2005, Drew and Eggleston 2006), yet variability in organismal behavior may strongly dictate the outcome of predator–prey interactions. While the model is relevant to a variety of taxa that use seagrass as a refuge (e.g., scallops, clams, shrimp, crabs, lobsters, and fishes), we based our model on the blue crab (Callinectes sapidus Rathbun), a commercially valuable, ubiquitous crustacean that inhabits shallow coastal waters of the Eastern and Gulf coasts of North America (Williams 1984). Blue crabs are relatively well-studied, but also exhibit a life history that typifies seagrass associated species. In this species, a planktonic larval stage is followed by postlarval settlement and metamorphosis to the juvenile form primarily in seagrass, salt marsh, or oyster reef habitats. Seagrasses form a critical nursery area for blue crab juveniles by providing them with food and refuge from predators (van Montfrans et al. 1995; Pile et al. 1996). Juvenile and adult conspecifics are a major predator of newly settled juvenile blue crabs and likely are the primary contributors to newly settled crab mortality (Moody 1994; Moksnes et al. 1997). Fishes such as striped bass (Marone saxatilis), flounder (Paralichthyus dentatus), and Atlantic croaker (Micropogonias undulatus) consume blue crabs as well (Hines et al. 1990; Mansour 1992).
Previous field experiments using tethered juvenile crabs indicate that per capita crab mortality decreases with seagrass fragmentation and loss: small juvenile blue crab mortality rates were lowest in small, isolated seagrass patches in Chesapeake Bay and North Carolina (Hovel and Lipcius 2001; Hovel 2003; Hovel and Fonseca 2005). This trend may be due to strong top-down interactions involving blue crabs in seagrass landscapes (Schulman 1996; Eggleston et al. 2005): larger cannibalistic blue crabs may not be abundant in fragmented portions of seagrass landscapes because they may be vulnerable to higher-order predators such as fishes and birds (Micheli and Peterson 1999). In a Chesapeake Bay seagrass landscape, abundances of large juvenile and adult blue crabs were inversely correlated with habitat fragmentation (Hovel and Lipcius 2001). Thus, trends in juvenile blue crab (prey) mortality with seagrass habitat fragmentation may be reversed in the absence of higher-order predators. We therefore also varied trophic structure in our model to determine whether relationships between habitat fragmentation and juvenile blue crab survival depend on the presence of higher-order predators in the landscape.
Methods
Model description
Our model was written using NetLogo software (Wilensky 1999). Individual behaviors such as movement, predator avoidance, hunting, and prey capture were governed by a set of rules, and each individual in the populations was explicitly modeled in a grid of cells which collectively represented a seagrass landscape. Cells represented areas of sea floor ca. 1 m × 1 m in size and total landscape size was ca. 2500 m2, an appropriate size for small (ca. 1 cm) newly settled prey organisms that also allows us to compare results to field studies that often are conducted at this scale (e.g. Irlandi 1994, 1997; Hovel and Fonseca 2005). All cells were classified into three possible habitat types: seagrass patch interior, seagrass patch edge, and matrix. The landscape was constructed on a torus, i.e. the bottom and top rows of cells and the far left and right columns of cells were adjacent to each other, respectively (Schneider 2001). In all seagrass patches the edge was one cell layer (1 m) thick (Fig. 1).

Generated landscape types. (A) Continuous habitat, (B) Large patches, (C) Small patches, (D) Very small patches. Grey cells represent interior habitat, white cells represent edge habitat, and black cells represent the matrix
To simulate different levels of habitat fragmentation, we created four landscape types modeled after actual seagrass landscapes in Chesapeake Bay (see Hovel and Lipcius 2001, 2002 for aerial photos, GIS information, and complete description). The “continuous seagrass” landscape type represents large expanses of unfragmented seagrass that often are found in areas of relatively low wave height and current speeds (Fonseca and Bell 1998). The “large patch” landscape type represents large patches of seagrass that typically are created from current scouring and are isolated by at least several meters of unvegetated sediment (matrix). The “small patch” landscape type represented small but highly connected patches of seagrass that may be created by waves and currents, digging predators (Townsend and Fonseca 1998), propeller scarring, and fishing practices (Sargent et al. 1995). Finally, the “very small patches” landscape type represented small seagrass patches isolated by large distances of unvegetated sediment that often are found in areas of high hydrodynamic activity (Fonseca and Bell 1998). By modeling simulated landscapes after these naturally occurring patterns of seagrass patchiness, we were able to represent increasing levels of habitat fragmentation and habitat loss in a landscape of constant size (Fig. 1).
Our model included prey, mesopredator, and top-level predator (henceforth referred to simply as predator) organisms. Prey represent newly settled juvenile blue crabs, mesopredators represent larger cannibalistic blue crabs that consume juveniles, while predators represent large fishes that prey on the larger blue crabs. As the primary predators of newly settled blue crabs are larger conspecifics (Mansour 1992; Moody 1994; Moksnes et al. 1997), we allowed prey to be eaten by mesopredators but not predators. Based on evidence that newly settled blue crabs are unlikely to cross expanses of unvegetated sediment between seagrass patches (Worthington et al. 1992; Pile et al. 1996; but see Etherington and Eggleston 2000), prey were confined to the interior and edge, while mesopredators and predators can move about interior, edge and matrix (Pile et al. 1996). All trophic levels have different levels of habitat preference represented through probabilities of moving from habitat type (Table 1). At the beginning of each simulation, prey, mesopredators, and predators were randomly distributed throughout their allowable portion of the landscape according to one of three settlement patterns (see below).
We created three general types of movement rules: random movement within habitat types, predation avoidance movement, and directed hunting. In the case of prey and mesopredators, random movement about habitat types represents the search for more favorable habitat. Prey prefer interior (Hovel and Lipcius 2002) and so have a higher probability of moving out of edge habitat than interior, while mesopredators prefer edge, have a lower preference for interior, and will always move from a matrix cell (if it does not mean encountering a predator). Prey move one cell in each time step, while mesopredators are more mobile and move two cells per time step in a consistent direction (i.e. the direction of movement across cells does not change within a time step). Predators can move randomly through all habitat types equally in search of food, and have the highest mobility of the three organism types (three cells per time step in a consistent direction).
The model simulated the settlement and survival of 200 blue crab juveniles (prey), and the subsequent interactions of the three trophic levels (with 30 mesopredators and 10 predators), for a period of 300 time steps, at which time we measured the number of prey remaining (i.e. cohort size). Abundances of each trophic level were chosen to reflect general ratios of prey, mesopredators and predators from field studies (Hovel and Lipcius 2001; Table 1). While somewhat abstract in this model, a time step represents the average amount of time an organism takes to make a movement decision for the purpose of finding prey or avoiding predators, and to act on that decision. Our intent was to model the persistence of a cohort of juvenile blue crabs for a short time period (days) after they settled into seagrass habitat. Settlement of juvenile crabs only occurs once in the simulation and there is no emigration or immigration beyond initial settlement (i.e. change in cohort size is due to mortality alone). To simulate deaths from starvation, disease, or physiological stress, all individuals had a constant, low rate of non-predator induced mortality.
Organismal behaviors
To test how seagrass habitat fragmentation and the behavior of prey and predators influences prey cohort size, within the four fragmentation types we varied three behavioral parameters in the model: (i) mesopredator and predator hunting ability, (ii) prey settlement routine, and (iii) prey movement ability. We chose to vary these parameters because there is little information on these behaviors, and our goal was to determine how the effects of habitat fragmentation on crab survival are affected by plausible ranges of organismal behaviors. We also varied (iv) trophic structure by running the model with and without top-level predators.
First, because methods of predator foraging vary among taxa (e.g. tactile vs. visually oriented foraging) and even within taxa depending upon the surrounding environment (e.g., high vs. low turbidity (Macia et al. 2003) or dense vs. sparse vegetation (Savino and Stein 1982)), mesopredators and predators were given two different hunting strategies: random hunting and directed hunting. In random hunting, mesopredators move in response to habitat preferences and to predator proximity, and predators move about the landscape randomly. Predators and mesopredators do not check if a prey item is in the vicinity and are only aware of prey items if they occur in the same cell. In directed hunting, mesopredators and predators can detect their prey within a radius of two cells (in seagrass) or three cells (for predators in matrix habitat) from their position. To determine how hunting ability influences patterns of prey cohort size with habitat fragmentation, the random and directed hunting routines both were used in model runs testing for the effects of settlement routine, prey movement ability, and predator presence.
Second, one of our primary goals was to determine how restricting prey movement (tethering) may influence the relationship between juvenile blue crab survival and habitat fragmentation. Tethering inflates predation rates on juvenile crabs, primarily by restricting the distance that juvenile crabs swim to escape predators (Zimmer-Faust et al. 1994). We therefore compared results for simulations in which prey could or could not move after settlement. For model runs in which prey were allowed to move, prey were given the ability to detect mesopredators and predators within a radius of 3 cells in the matrix, and 2 cells in seagrass, and then were able to move in the opposite direction, provided they did not move to a cell with another mesopredator or predator and that they do not leave the patch. Two levels of escape response were used: prey could move one cell away from mesopredators and predators, or two cells away from mesopredators and predators. These distances seemed plausible because juvenile crabs can swim up to 40 cm s−1 when pursued by larger conspecifics (Zimmer-Faust et al. 1994). Mesopredators also were given the ability to detect and avoid predators by moving one cell in the opposite direction. In these runs, prey settled randomly within seagrass habitat.
Third, because small-scale settlement patterns largely are unknown, we incorporated three patterns of settlement into the model: (1) edge settlement, in which juvenile crabs initially were distributed randomly throughout patch edges only, as would be the case if crabs settle upon first encountering seagrass patch edges (Worthington et al. 1992; McNeill and Fairweather 1993); (2) interior settlement, in which juvenile crabs initially were randomly distributed throughout patch interiors only, as would be the case if settling crabs choose patch interiors, or if the buffering of currents deposits crabs in patch interiors, as Bell et al. (1995) found with macroalgae, and Eggleston et al. (1998) suggested may partially explain high blue crab settler densities in large patches; and (3) random settlement throughout all habitat cells.
Fourth, to determine the effect of the presence of predators on prey cohort size, we ran the model (with random settlement and directed hunting) with and without predators. Prey were given an intermediate ability to avoid mesopredators.
For all tests, model output was mean prey cohort size after 300 time steps (+1 standard error) from 100 repetitions. We also recorded the number of time steps to mesopredator extirpation for each landscape type with and without directed hunting.
Results
General observations and model sensitivity
For all models, prey cohort size declined hyperbolically with time. Cohort size dropped rapidly until ca. 50 time steps, after which declines in prey cohort size were gradual (e.g., Fig. 2A and B). Thus, relative differences in prey cohort size among fragmentation types were established fairly rapidly in the model. Simulations of more than 300 time steps revealed few differences among fragmentation types, as the primary source of mortality after ca. 150 time steps was non-predator induced mortality. Final prey cohort sizes ranged between 0 (when predators were absent) and ca. 100 individuals after 300 time steps.

(A) Prey cohort size with respect to time in the presence and absence of top-level predators. (B) Prey cohort size with respect to time when prey were tethered vs. mobile. (“Cont” = Continuous habitat; “LP” = Large patches; “SP” = Small patches; “VSP” = Very small patches; “no predators” = top-level predators absent; “predators” = top-level predators present)
We performed sensitivity analyses for prey and mesopredator habitat preferences, landscape size, and the density of organisms in the landscape. The model was insensitive to prey and mesopredator habitat preferences; when prey and mesopredators had equivalent preferences for edge habitat and interior habitat, results were very similar to when prey preferred interior habitat and mesopredators preferred edge habitat. In contrast, landscape size was important in the model; as total landscape size increased from 41 × 41 cells to 141 × 141 cells, differences in prey cohort size among fragmentation types grew smaller and became negligible at the largest landscape size. This is due to the low encounter rate, irrespective of habitat fragmentation level, when all individuals are spread over a larger area. Therefore, all subsequent model runs were performed with a landscape size of 50 × 50 cells. When we doubled the density of all organisms in the landscape (to 400 prey: 60 mesopredators: 20 predators), but kept ratios of organismal densities equivalent (thereby increasing the encounter rate), the proportion of prey remaining differed by only 2–5% from that of baseline densities (200 prey: 30 mesopredators: 10 predators) (Fig. 3). However, the pattern of prey cohort size among fragmentation types changed slightly: prey cohort size tended to increase with fragmentation and loss in both models, but prey cohort size was maximized in small patches at standard densities, but was maximized in very small patches at double density.

Percentage of prey remaining under baseline and doubled initial population densities after 300 time steps with untethered prey and directed hunting by both predators and mesopredators
Prey movement
Effects of habitat fragmentation on prey cohort size varied with hunting ability and with prey movement ability (Fig. 4). When predators and mesopredators hunted randomly, in all fragmentation types prey cohort size was lower when prey were tethered (i.e. not able to move) than when prey were mobile, and differences in prey cohort size between models with tethered vs. mobile prey ranged from 5 to 40% depending on fragmentation type (Fig. 4). When prey were tethered or exhibited minimal movement, cohort size was maximized in small patches, and was lowest in continuous seagrass. However, when prey exhibited maximum mobility, patterns reversed such that cohort size was maximized in continuous seagrass and was lowest in very small patches.

Final prey cohort size for tethered and mobile prey (minimum and maximum movement) with (A) and without (B) directed hunting
When mesopredators and predators exhibited directed hunting, prey cohort size increased with prey movement ability but was ca. two-fold lower than when mesopredators and predators hunted randomly (Fig. 4). For tethered prey and for prey with minimal movement ability, cohort size was highest in small patches and lowest in continuous seagrass. For prey exhibiting maximum movement ability, patterns reversed such that cohort size was highest in large patches and lowest in very small patches.
Predator presence
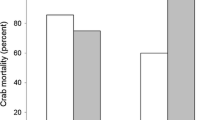
There were dramatic differences in patterns of prey cohort size when predators were present vs. absent (Fig. 5). Regardless of fragmentation type or whether mesopredators and predators exhibited directed hunting, not surprisingly prey cohort size was greater in the presence of predators than when predators were absent. When mesopredators and predators hunted randomly, prey cohort size was lowest in continuous seagrass than in all three fragmented seagrass landscapes, and prey cohort size peaked in very small patches. When mesopredators hunted randomly and predators were absent, prey cohort size was lowest in very small patches, was intermediate in continuous seagrass, and was highest in (and similar between) large patches and small patches. A comparison of the two model versions (presence and absence of predators) indicates that the largest difference in prey cohort size occurred in very small patches, where cohort size was more than twofold greater in the presence of predators than in their absence, and the smallest difference occurred in continuous seagrass.

Final prey cohort size in the presence and absence of top predators with (A) and without (B) directed hunting
When mesopredators and predators exhibited directed hunting and predators were present, prey cohort size was lowest in continuous seagrass, intermediate in large patches and very small patches, and was highest in small patches. When mesopredators exhibited directed hunting and predators were absent, no prey remained after 300 time steps. Prey extinction occurred approximately twice as quickly in very small patches as in all other fragmentation types.
Settlement
When mesopredators and predators hunted randomly, prey cohort size was lower in continuous seagrass than in large patches, small patches, and very small patches in all three settlement routines (random, edge, and interior settlement), and differences in prey cohort size among large patches, small patches, and very small patches were slight (Fig. 6).

Final prey cohort size in different settlement routines (random, edge, and interior) with (A) and without (B) directed hunting
When mesopredators and predators exhibited directed hunting, and when settlement occurred randomly within habitat, prey cohort size was lowest in continuous seagrass, was highest in small patches, and was intermediate in large and very small patches. When settlement was only allowed along the edges of patches, the trend among fragmentation types was similar to that of random settlement, except that prey cohort size was slightly lower in continuous seagrass and was slightly higher in small patches. When prey only settled in the interior of patches, prey cohort size did not increase relative to models with other settlement routines in continuous seagrass, large patches, and very small patches, but prey cohort size increased by ca. 8% in small patches (Fig. 6).
Discussion
In our model, seagrass habitat fragmentation and loss strongly influenced prey cohort size, but predator hunting strategy, prey movement, trophic structure, and patterns of prey settlement modified the effects of fragmentation and loss on prey. Overall, prey cohort size was maximized in fragmented landscapes vs. continuous landscapes, which corresponds to results from field experiments examining relative survival of tethered juvenile blue crabs. However, this overall pattern was modified by aspects of prey and predator behavior. We found that the presence of top-level predators, the relative ability of predators and mesopredators to detect and respond to their prey, and prey movement had large influences on prey cohort size and on relative differences in prey cohort size among landscape types, whereas variability in prey settlement had smaller influences on prey cohort size. Not surprisingly, prey cohort size was maximized when predators were present to rapidly reduce mesopredator populations, and when predators and mesopredators hunted randomly vs. when they were able to detect and respond to prey. Finally, we found that increasing prey mobility reversed patterns of prey survival vs. seagrass fragmentation.
Prey movement
One of our chief goals in this study was to determine how restricting prey movement (tethering) may influence rates of prey mortality (as measured by prey cohort size), and whether tethering may bias relative rates of prey mortality among fragmentation types. Tethering not only overestimates absolute rates of prey mortality (Zimmer-Faust et al. 1994), but also has the potential to bias rates of prey mortality among habitat structure treatments (Peterson and Black 1994). For instance, at the landscape scale, tethering may bias experiments on prey survival among seagrass patch sizes. Prey organisms such as very small blue crabs and small fishes generally are reluctant to leave patches to escape from predators (see also With et al. 1999 for a terrestrial analog), and they rely more on movement and crypsis within patches to avoid detection and capture (Savino and Stein 1982; Main 1987; KAH, personal observation). In a very small patch, mobile prey therefore may not travel farther or exhibit different behaviors than tethered prey, whereas in large patches, mobile prey may be able to more effectively avoid predators than can tethered prey. This likely was responsible for changes in the effects of habitat fragmentation on prey cohort size with prey movement ability in our model (Fig. 4). Tethered juvenile blue crabs survived best in fragmented seagrass (small or very small patches), whereas highly mobile juvenile blue crabs survived best in continuous seagrass or large patches. This suggests that tethering has the potential to bias estimates of relative mortality among fragmentation types by restricting prey movement, though the bias is relatively small until juvenile blue crabs travel > 1 m to escape from predators. Though juvenile blue crabs traveled up to 40 cm s−1 to avoid predators in laboratory trials, reducing predator capture success by 60% compared to tethered prey (Zimmer-Faust et al. 1994), little is known about escape behaviors of prey in seagrass habitat. Studies on the potential for tethering to bias relative survival data among habitat treatments have focused on small-scale habitat structure, but more information is needed from field or laboratory studies on the potential for bias at landscape scales.
Hunting ability and predator presence
Predators such as large blue crabs may use tactile, chemosensory, and visual cues to search for prey (Hughes and Seed 1995; KAH personal observation). Large blue crabs (>100 mm carapace width) used tactile hunting to search for marsh mussels Geukensia demissa, and visual hunting to hunt for mobile prey such as fiddler crabs Uca spp. (Hughes and Seed 1995). Though many fishes hunting in seagrass and in unvegetated sediment use visual cues to hunt for prey, variability in turbidity (Macia et al. 2003), hydrodynamics (Pile et al. 1996; Hovel and Fonseca 2005), and seagrass structural complexity (Stoner 1979; Heck and Orth 1980; Hemminga and Duarte 2000; Bartholomew 2002) may influence predator hunting ability. For instance, as vegetation density increased, largemouth bass Micropterus salmoides switched from actively pursuing prey to a sit-and-wait strategy (Savino and Stein 1982).
Variability in hunting ability of mesopredators and predators had dramatic effects on prey cohort size. In general, when mesopredators and predators exhibited directed hunting, prey cohort sizes were far lower then when mesopredators and predators hunted randomly. This corresponded to strong effects of predator hunting on mesopredator persistence; in all but very small patches, predators with directed hunting caused mesopredators to become extirpated 2–5 times faster than when predators hunted randomly. This was true even though mesopredators had the ability to respond to predators in their vicinity by moving away from predators. Another general effect of directed hunting was the maximization of prey cohort size in small patches, rather than in very small patches as was true when hunting occurred randomly.
The first major pattern observed from these results was that when predators hunted randomly, the number of prey remaining was lower in continuous seagrass than in other landscape types, corresponding to high mesopredator abundance in continuous seagrass (Fig. 5). This corresponds to field experiments using tethered juvenile blue crabs, in which per capita crab (=prey) mortality was highest in continuous seagrass and decreased with increasing seagrass fragmentation and loss (Hovel and Lipcius 2001; Hovel and Fonseca 2005). Additionally, in Chesapeake Bay, the abundance of larger blue crabs (represented by mesopredators in our model) was inversely correlated with seagrass fragmentation and loss (Hovel and Lipcius 2001). Larger blue crabs may be reluctant to cross expanses of unvegetated sediment due to predation by large fishes and birds (see also Micheli and Peterson 1999), or they may experience high mortality in unvegetated sediment. In our model, when predators were in seagrass habitat they had a lower probability of detecting mesopredators in their vicinity and of consuming mesopredators once arriving in the same cell than within matrix habitat. This simulated the difficulty that many predators have in detecting and capturing their prey in structured vs. unstructured habitat (Wilson et al. 1987; Heck and Crowder 1991; Orth 1992). This also resulted in high mortality rates of mesopredators in the very small patch landscape type that had a high proportion of matrix habitat, resulting in high prey cohort sizes in very small patches.
The second major pattern was that when mesopredators and predators exhibited directed hunting, the number of prey remaining increased considerably and differences among landscape types were less dramatic. However, the small patch landscape type may have had the best overall conditions for prey, in terms of their ability to avoid mesopredators and the vulnerability of mesopredators to predators. This may be because mesopredators are widely dispersed in the small patch landscape, which may increase encounter rates with predators, and small patches are surrounded by a fair amount of matrix habitat in which predators hunt more efficiently. Additionally, small patches were highly connected, such that prey were better able to avoid mesopredators by moving away from them, rather than being trapped in small, isolated patches. Similarly, in an individual-based model for shrimp (=prey) in Gulf Coast salt marsh habitats, landscapes with a high proportion of edge habitat produced higher simulated shrimp survival rates than landscapes with less edge habitat, because high amounts of edge habitat allowed shrimp access to vegetation that provided food and cover without additional movement-related mortality (Haas et al. 2004).
Regardless of whether mesopredators and predators exhibited random or directed hunting, prey cohort sizes were nearly always lowest in continuous seagrass when simulated top-level predators were present. However, prey cohort sizes were lowest in very small patches when top-level predators were absent. Without the risk of predation, mesopredators persisted and were able to find and exploit isolated patches of dense prey in very small patches. High rates of predator-induced mortality in small patches with high edge-to-interior ratios is common in fragmented terrestrial systems (e.g., Wilcove 1985; Small and Hunter 1988; Robinson et al. 1995; Rushton et al. 2000; Seymour et al. 2004; but see Donovan et al. 1997, Tewksbury et al. 1998). While there are a variety of differences between the forested habitats used in these studies and our simulated seagrass habitat (e.g. temporal and spatial scales, organism behaviors and life histories, etc.), one important difference may be trophic structure. Egg predators and nest parasites in forested landscapes often are relatively immune to predation. In contrast, trophic cascades likely are more prevalent in low diversity aquatic systems than in terrestrial systems (Strong 1992; but see Pace et al. 1999 and Crooks and Soulé 1999 for an example of mesopredator release in fragmented terrestrial systems), and may be common in seagrasses where herbivorous crustaceans are fed upon by resident juvenile fishes and invertebrates, that are in turn fed upon by larger, transient fish predators (Hemminga and Duarte 2000; Williams and Heck 2001). Additionally, the cannibalistic nature of blue crabs creates strong top-down controls on juvenile blue crab survival and cohort size (Moksnes et al. 1997). The vulnerability of mesopredators to higher-order predators, particularly in matrix habitat, changed the relationship between prey cohort size and habitat fragmentation in our model such that prey cohort size was maximized in fragmented landscape types and minimized in continuous seagrass. Juvenile blue crab relative survival was highest in small isolated seagrass patches and lowest in continuous seagrass in Virginia and North Carolina (Hovel and Lipcius 2001; Hovel and Fonseca 2005). This pattern is not exclusive to seagrass habitats, and also can occur in grassland (Kareiva 1987) and forested habitats (Tewksbury et al. 1998).
Settlement
In contrast to predator presence and hunting ability, settlement patterns (random, edge, and interior) had relatively little influence on prey cohort size. Prey populations that settled exclusively in edge habitat or in interior habitat had similar patterns of cohort size vs. landscape type as did prey populations that settled randomly within seagrass habitat. This may have partly been due to rapid redistribution of prey after settlement, though patterns were similar even when prey were tethered after settlement (data not shown). The largest difference among settlement patterns occurred in small patches, in which settlement in the patch interiors increased prey cohort size over random and edge settlement. In the small patch landscape type, edge habitat was rare and widely dispersed, which may have reduced encounter rates of prey with mesopredators.
Though many studies suggest that densities of recently settled organisms vary among patch sizes and landscapes, little information is available on how seagrass patchiness influences organismal settlement. Habitat encounter rates for settling larvae or postlarvae may be maximized when the habitat is composed of many small patches, or in landscapes with high proportions of edge (Keough 1984; McNeill and Fairweather 1993). Settling larvae and postlarvae therefore may be abundant at patch edges if they remain where they first encounter seagrass blades. Alternatively, attenuation of currents in patch interiors (Bell et al. 1995) or post-settlement movement (e.g, by strong swimming postlarvae such as blue crabs) may concentrate newly settled individuals in patch interiors or in large patches. Higher abundance of newly settled blue crabs in large (4 m2) vs. small (0.25 m2) artificial seagrass patches in North Carolina may have been due to predation on postlarvae by grass shrimp in small patches or to attenuation of currents carrying postlarvae in large patches (Eggleston et al. 1998). Similar processes may have been responsible for greater juvenile blue crab densities in patch interiors vs. patch edges in Chespeake Bay (Hovel and Lipcius 2002). Field studies are needed to better document how patchiness and post-settlement predation interact to influence the distribution of seagrass epifauna.
Caveats
Our model was intended to simulate interactions among predator and prey organisms in seagrass habitat over short time scales following settlement (i.e. hours to days). In order to study predator–prey interactions in the absence of confounding effects and feedbacks, some processes were not included that may play a role in dictating prey cohort size. First, we did not incorporate density-dependence into the model. Blue crabs are agonistic, and large blue crabs may interfere with one another when foraging, resulting in higher prey survival than would otherwise be expected when mesopredator densities are high (see also Mistri 2003). We also did not include competition of the prey species with other prey species. Simulation studies have shown that in patchy environments with a common predator and two competitive prey species, competition between prey can drive one prey species to extinction while the predator population is maintained because of the alternative prey (Namba et al. 1999; Schenider 2001). Our study, on the other hand, is primarily concerned with the relative effects of movement and hunting ability across trophic levels and fragmentation types over short time scales.
Second, we did not incorporate variety in seagrass structural complexity into our model. Structural complexity often differs among seagrass patch sizes (Irlandi 1994, 1997; Hovel and Lipcius 2001) and structural complexity may interact with seagrass landscape structure to dictate prey survival (Hovel and Fonseca 2005). Our goal, however, was to determine the singular effects of landscape structure on prey populations and on predator–prey relationships. The effects of seagrass structural complexity on predator–prey relationships is the subject of ongoing research.
Third, we did not include population dynamics in this model. However, it is well known that the persistence of prey and mesopredator populations will depend on annual survival rates, fecundity, dispersal (Graf et al. 2007) and density-dependent processes through time. For instance, it is expected that the cannibalistic nature of blue crabs would have a population-level feedback over time periods much longer than the one used in this model (Govindarajulu et al. 2005; Wise 2006). We focused on very short time scales to better investigate the relationship between movement, hunting ability and fragmentation level without the confounding effects of longer-term positive and negative feedbacks on population dynamics. Seymour et al. (2004) have shown that for nest predation by red foxes (Vulpes vulpes) the use of IBMs over short time scales elucidates the explicit relationship between movement, predation and fragmentation and leads to practical management recommendations that might not be revealed for studies over longer time scales (see also Alderman et al. 2005). We also did not explicitly consider the role of movement rules based on energy intake in the persistence of prey, though in heterogeneous landscapes, important trade-offs exist between moving to minimize predation risk and moving to maximize energy intake (Gardner and Gustafson 2004). In our model, both mesopredators and prey moved to minimize predation risk and directed hunting rules were a surrogate for energy-based movement rules.
The results of our model highlight the importance of habitat fragmentation and organismal movement in determining predator–prey relationships. Furthermore, our results suggest priorities for future field research on the behaviors of prey and predators in seagrass habitats, and how these are modified by seagrass landscape structure. From our results, we suggest that trophic structure, modes of hunting, and to a lesser extent the interaction of landscape structure and prey movement should be priorities for research.
Reference
Alderman J, McCollin D, Hinsley SA, Bellamy PE, Picton P, Crockett R (2005) Modelling the effects of dispersal and landscape configuration on population distribution and viability in fragmented habitat. Landsc Ecol 20:857–870
Bartholomew A (2002) Total cover and cover quality: predicted and actual effects on a predator’s foraging success. Mar Ecol Prog Ser 227:1–9
Bell SS, Hall M, Robbins BD (1995) Toward a landscape approach in seagrass beds: using macroalgal accumulation to address questions of scale. Oecologia 104:163–168
Bell SS, Brooks RA, Robbins BD et al (2001) Faunal response to fragmentation in seagrass habitats: Implications for seagrass conservation. Bio Cons 100:115–123
Bologna P, Heck K Jr (1999) Differential predation and growth rates of bay scallops within a seagrass habitat. J Exp Mar Biol Ecol 239:299–314
Crooks KR, Soule ME (1999) Mesopredator release and avifaunal extinctions in a fragmented system. Nature 400:563–566
Darcy MC, Eggleston DB (2005) Do habitat corridors influence animal dispersal and colonization in estuarine systems? Landscape Ecology 20:841–855
Donovan T, Jones P, Annand E et al (1997) Variation in local-scale edge effects: mechanisms and landscape context. Ecology 78:2064–2075
Drew CA, Eggleston DB (2006) Currents, landscape structure, and recruitment success along a passive-active dispersal gradient. Landscape Ecology 21:917–931
Eckrich CE, Holmquist JG (2000) Trampling in a seagrass assemblage: direct effects, response of associated fauna, and the role of substrate characteristics. Mar Ecol Prog Ser 201:199–209
Eggleston DB, Etherington LL, Elis WE (1998) Organism response to habitat patchiness: Species and habitat-dependent recruitment of decapod crustaceans. J Exp Mar Biol Ecol 223:111–132
Eggleston DB, Elis WE, Etherington LL et al (1999) Organism responses to habitat fragmentation and diversity: habitat colonization by estuarine macrofauna. J Exp Mar Biol Ecol 236:107–132
Eggleston DB, Bell GW, Amavisca AD (2005) Interactive effects of episodic hypoxia and cannibalism on juvenile blue crab mortality. J Exp Mar Biol Ecol 325:18–26
Etherington LL, Eggleston DB (2000) Large-scale blue crab recruitment: linking postlarval transport, post-settlement planktonic dispersal, and multiple nursery habitats. Mar Ecol Prog Ser 204:179–198
Fonseca MS, Bell SS (1998) Influence of physical setting on seagrass landscapes near Beaufort, North Carolina, USA. Mar Ecol Prog Ser 171:109–121
Fonseca MS, Kenworthy W, Thayer G (1998) Guidelines for the conservation and restoration of seagrasses in the United States and adjacent waters. 12, National Oceanic and Atmospheric Association, Silver Spring
Gardner RH, Gustafson EJ (2004) Simulating dispersal of reintroduced species within heterogeneous landscapes. Eco Model 171:339–358
Govindarajulu P, Altwegg R, Anholt B. (2005) Matrix model investigation of invasive species control: Bullfrogs on Vancouver Island. Eco App 15:2161–2170
Graf RF, Kramer-Schadt S, Fernandez N, Grimm V (2007) What you see is where you go? Modeling dispersal in mountainous landscapes. Landscape Ecol 22:853–866
Haas HL, Rose KA, Fry B et al (2004) Brown shrimp on the edge: linking habitat to survival using an individual-based simulation model. Ecol App 14:1232–1247
Healey D, Hovel KA (2004) Seagrass bed patchiness: effects on epifaunal communities in San Diego Bay, USA. J Exp Mar Biol Ecol 313:155–174
Heck K Jr, Orth R (1980) Structural components of eelgrass (Zostera marina) meadows in the lower Chesapeake Bay - decapod crustacea. Estuaries 3:289–295
Heck K Jr, Thoman T (1981) Experiments on predator–prey interactions in vegetated aquatic habitats. J Exp Mar Biol Ecol 53:125–134
Heck K Jr, Crowder LB (1991) Habitat structure and predator–prey interactions in aquatic systems. In: Bell SS, McCoy E, Mushinsky H (eds) Habitat structure: the physical arrangement of objects in space. Chapman and Hall, London, pp 281–299
Heck K Jr, Coen L, Morgan SG (2001) Pre- and post-settlement factors as determinants of juvenile blue crab Callinectes sapidus abundance: results from the north-central Gulf of Mexico. Mar Ecol Prog Ser 222:163–176
Hemminga MA, Duarte CM (2000) Seagrass ecology. Cambridge University Press, Cambridge
Hines AH, Haddon AH, Weichert LA (1990) Guild structure and foraging impact of blue crabs and epibenthic fish in a subestuary of Chesapeake Bay. Mar Ecol Prog Ser 67:105–126
Hovel KA (2003) Habitat fragmentation in marine landscapes: relative effects of habitat cover and configuration on juvenile crab survival in California and North Carolina seagrass beds. Bio Cons 110:401–412
Hovel KA, Lipcius RN (2001) Habitat fragmentation in a seagrass landscape: patch size and complexity control blue crab survival. Ecology 82:1814–1829
Hovel KA, Lipcius RN (2002) Effects of seagrass habitat fragmentation on juvenile blue crab survival and abundance. J Exp Mar Biol Ecol 271:75–98
Hovel KA, Fonseca MS (2005) Influence of seagrass landscape structure on the juvenile blue crab habitat-survival function Mar. Ecol Prog Ser 300:179–191
Hughes RN, Seed R (1995) Behavioural mechanisms of prey selection in crabs. J Exp Mar Biol Ecol 193:225–238
Irlandi E (1994) Large- and small-scale effects of habitat structure on rates of predation: how percent coverage of seagrass affects rates of predation and siphon nipping on an infaunal bivalve. Oecologia 98:176–183
Irlandi E (1997) Seagrass patch size and survivorship of an infaunal bivalve. Oikos 78:511–518
Irlandi E, Ambrose W Jr, Orlando B (1995) Landscape ecology and the marine environment: how spatial configuration of seagrass habitat influences growth and survival of the bay scallop. Oikos 72:307–313
Jenkins G, Keough M, Hamer P (1998) The contributions of habitat structure and larval supply to broad-scale recruitment variability in a temperate zone, seagrass-associated fish. J Exp Mar Biol Ecol 226:259–278
Kareiva P (1987) Habitat fragmentation and the stability of predator–prey interactions. Nature 326:388–390
Keough M (1984) Effects of patch size on the abundance of sessile marine invertebrates. Ecology 65:423–437
Lipcius RN, Eggleston DB, Miller D et al (1998) The habitat-survival function for Caribbean spiny lobster: an inverted size effect and non-linearity in mixed algal and seagrass habitats. Mar Fresh Res 49:807–816
Macia A, Abrantes KGS, Paula K (2003) Thornfish Terapon jarbua (Forskal) predation on juvenile white shrimp Penaeus indicus H. Milne Edwards and brown shrimp Metapenaeus monoceros (Fabricius): the effect of turbidity, prey density, substrate type and pneumatophore density. J Exp Mar Biol Ecol 291:29–56
Main K (1987) Predator avoidance in seagrass meadows: prey behavior, microhabitat selection, and cryptic coloration. Ecology 68:170–180
Mansour R (1992) Foraging ecology of the blue crab, Callinectes sapidus Rathbun, in lower Chesapeake Bay. Dissertation, The College of William and Mary
McNeill S, Fairweather P (1993) Single large or several small marine reserves? An experimental approach with seagrass fauna. J Biogeog 20:429–440
Micheli F, Peterson CH (1999) Estuarine vegetated habitats as corridors for predator movements. Cons Biol 13:869–881
Mistri M (2003) Foraging behaviour and mutual interference in the Mediterranean shore crab, Carcinus aestuarii, preying upon the immigrant mussel Musculista senhousia. Est Coast Shelf Sci 56:155–159
Moksnes PO, Lipcius RN, Phil L et al (1997) Cannibal-prey dynamics in juveniles and postlarvae of the blue crab. J Exp Mar Biol Ecol 215:157–187
Moody K (1994) Predation on juvenile blue crabs, Callinectes sapidus Rathbun, in lower Chesapeake Bay: patterns, predators, and potential impacts. Dissertation, The College of William and Mary
Murphey P, Fonseca MS (1995) Role of high and low energy seagrass beds as nursery areas for Penaeus duorarum in North Carolina. Mar Ecol Prog Ser 121:91–98
Namba T, Umemoto A, Minami E (1999) The effects of habitat fragmentation on persistence of source-sink metapopulations in systems with predators and prey or apparent competitors. Theo Pop Bio 56:123–137
Orth R (1992) A perspective on plant-animal interactions in seagrasses: physical and biological determinants influencing plant and animal abundance. In: John D, Hawkins S, Price J (eds) Plant-animal interactions in the marine benthos. Clarendon Press, Oxford, pp 147–164
Orth R, Moore K (1988) Submerged aquatic vegetation in the Chesapeake Bay: a barometer of bay health. In: Understanding the estuary: advances in Chesapeake Bay research. Chesapeake Research Consortium, Baltimore
Pace M, Cole J, Carpenter S et al (1999) Trophic cascades revealed in diverse ecosystems. Trends Ecol Evo 14:483–488
Perkins-Visser E, Wolcott T, Wolcott D (1996) Nursery role of seagrass beds: enhanced growth of juvenile blue crabs (Callinectes sapidus Rathbun). J Exp Mar Biol Ecol 198:155–173
Peterson CH (1986) Enhancement of Mercenaria mercenaria densities in seagrass beds: is pattern fixed during settlement season or altered by subsequent differential survival? Limnol Oceanog 31:200–205
Peterson CH, Black R (1994) An experimentalist’s challenge: when artifacts of intervention interact with treatments. Mar Ecol Prog Ser 111:289–297
Pile A, Lipcius RN, van Montfrans J et al (1996) Density-dependent settler-recruit-juvenile relationships in blue crabs. Ecol Monogr 66:277–300
Robbins BD, Bell SS (1994) Seagrass landscapes: a terrestrial approach to the marine subtidal environment. Trends Ecol Evo 9:301–304
Robinson S, Thompson F, Donovan T et al (1995) Regional forest fragmentation and the nesting success of migratory birds. Science 267:1987–1990
Rushton S, Barreto G, Cormack RM et al (2000) Modeling the effect of mink and habitat fragmentation on the water vole. J App Ecol 37:475–490
Ryer C, van Montfrans J, Moody K (1997) Cannibalism, refugia and the molting blue crab. Mar Ecol Prog Ser 147:77–85
Sargent F, Leary D, Crewz D et al (1995) Scarring of Florida’s seagrasses: assessment and management options. Florida Marine Research Institute Technical Report TR−1 Florida Department of Environmental Protection, St. Petersburg
Savino J, Stein R (1982) Predator–prey interaction between largemouth bass and bluegills as influenced by simulated, submersed vegetation. Trans Amer Fish Soc 111:255–266
Schneider MF (2001) Habitat loss, fragmentation and predator impact: spatial implications for prey conservation. J App Ecol 38:720–735
Schulman J (1996) Habitat complexity as a determinant of juvenile blue crab survival Master’s thesis, The College of William and Mary
Seymour A, Harris S, White P (2004) Potential effects of reserve size on incidental nest predation by red foxes Vulpes vulpes. Ecol Model 175:101–114
Small M, Hunter M (1988) Forest fragmentation and avian nest predation in forested landscapes. Oecologia 76:62–64
Stoner A (1979) Species-specific predation on amphipod crustacea by the pinfish Lagodon rhomboides: mediation by macrophyte standing crop. Mar Bio 55:201–207
Strong DS (1992) Are trophic cascades all wet? Differentiation and donor-control in speciose ecosystems. Ecology 73:747–754
Tewksbury J, Heil S, Martin T (1998) Breeding productivity does not decline with increasing fragmentation in a western landscape. Ecology 79:2890–2903
Townsend E, Fonseca MS (1998) Bioturbation as a potential mechanism influencing spatial heterogeneity of North Carolina seagrass beds. Mar Ecol Prog Ser 169:123–132
Uhrin AV, Holmquist JG (2003) Effects of propeller scarring on macrofaunal use of the seagrass Thalassia testudinum. Mar Ecol Prog Ser 250:62–70
van Montfrans J, Epifanio C, Knott D et al (1995) Settlement of blue crab postlarvae in western North Atlantic estuaries. Bull Mar Sci 57:834–854
Wilcove D (1985) Nest predation in forest tracts and the decline of migratory songbirds. Ecology 66:1211–1214
Wilensky U (1999) NetLogo. http://ccl.northwestern.edu/netlogo/. Center for Connected Learning and Computer-Based Modeling, Northwestern University, Evanston, IL
Williams AB (1984) Shrimps, lobsters, and crabs of the Atlantic coast of the Eastern United States, Maine to Florida. Smithsonian Institution Press, Washington
Williams SL, Heck K Jr (2001) Seagrass community ecology. In: Bertness MD, Gaines SD, Hay ME (eds) Marine community ecology. Sinauer Associates, Sunderland, MA
Wilson K, Heck K Jr, Able K (1987) Juvenile blue crab, Callinectes sapidus, survival: an evaluation of eelgrass, Zostera marina, as refuge. Fish Bull 85:53–58
Wise DH (2006) Cannibalism, food limitation, intraspecific competition and the regulation of spider populations. Ann Rev Entom 51:441–465
With K, Cadaret S, Davis C (1999) Movement responses to patch structure in experimental fractal landscapes. Ecology 80:1340–1353
Worthington D, Ferrell D, McNeill S, Bell J (1992) Effects of the shoot density of seagrass on fish and decapods: are correlations evident over larger spatial scales? Mar Biol 112:139–146
Zimmer-Faust R, Fielder D, Heck K Jr et al (1994) Effects of tethering on predatory escape by juvenile blue crabs. Mar Ecol Prog Ser 111:299–303
Acknowledgements
We thank Matt Nicholson, Elizabeth Hinchey, and Brad Robbins for organizing the special session in marine and coastal applications in landscape ecology at the 19th annual US_IALE conference in Las Vegas, NV. NetLogo software and supporting materials were provided free of charge online at http://www.ccl.northwestern.edu/netlogo/.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Hovel, K.A., Regan, H.M. Using an individual-based model to examine the roles of habitat fragmentation and behavior on predator–prey relationships in seagrass landscapes. Landscape Ecol 23 (Suppl 1), 75–89 (2008). https://doi.org/10.1007/s10980-007-9148-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10980-007-9148-9