
Abstract
Objectives
Effects of place-based criminal justice interventions extend across both space and time, yet methodological approaches for evaluating these programs often do not accommodate the spatiotemporal dimension of the data. This paper presents an example of a bivariate spatiotemporal Ripley’s K-function, which is increasingly employed in the field of epidemiology to analyze spatiotemporal event data. Advantages of this technique over the adapted Knox test are discussed.
Methods
The study relies on x–y coordinates of the exact locations of stop-question-frisk (SQF) and crime incident events in New York City to assess the deterrent effect of SQFs on crime across space at a daily level.
Results
The findings suggest that SQFs produce a modest reduction in crime, which extends over a three-day period. Diffusion of benefits is observed within 300 feet from the location of the SQF, but these effects decay as distance from the SQF increases.
Conclusions
A bivariate spatiotemporal Ripley’s K-function is a promising approach to evaluating place-based crime prevention interventions, and may serve as a useful tool to guide program development and implementation in criminology.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Evaluations of place-based criminal justice interventions have been limited in their ability to assess program outcomes in both space and time simultaneously. Prior scholarship in this area tends to consider only one of those elements at a time. For example, Koper (1995) employs event history analysis to examine whether police presence at crime hot spots creates residual deterrence. While useful to identify the optimal duration of time an officer should spend at a hot spot to achieve maximum deterrence (the Koper curve), this aspatial analysis does not provide information on how far deterrent effects extend over a given distance or whether crime in this particular instance is spatially displaced. Alternatively, a study may examine program effects over space and not time. For instance, Weisburd et al. (2006) examines whether concentrating policing at crime hot spots leads to spatial displacement of crime to nearby areas (a two-block radius surrounding the target area) and concludes that intensive police presence does not displace crime outside of the targeted areas. However, accommodating the temporal element of their data would yield a more approximate estimation of true treatment effects since program effects are averaged across the entire study.
The ability of analyses to detect space–time interactions is an important aspect of program evaluation. A space–time interaction implies “more than just spatial clustering (same places experience more burglaries than other regardless of time) or just temporal clustering (the overall risk of burglary varies by season)” (Fotheringham et al. 2000, p. 245), and arises when the location and time of occurrence for an event is dependent upon the location and time of occurrence of a separate event. An example of a space–time interaction is when motor vehicle theft may become more frequent in coastal communities during the summer when there is an increase in the number of vacationers (Levine 2004). In recent years, there have been developments in modeling to examine the problem of space–time interactions in the field of epidemiology. Even though the underlying areas of study differ greatly, methodological advancements in epidemiology can be used to inform and advance the field of criminology.
The aim of this study is to demonstrate the use a bivariate spatiotemporal K-function, which is an innovative method for identifying space–time interactions (Diggle et al. 1995). So far, this statistical technique has been neglected in the field of criminology, but it is increasingly used by epidemiologists to examine the interaction between two point patterns in space and time. To illustrate this approach, the present study employs the method to assess the influence of police stop-question-frisk practices (SQFs) on crime at a microgeographic level. Specifically, this study uses crime incident data to examine the effect of SQFs conducted by the New York City Police Department (NYPD) in a selected subset of cases in the Bronx, NY over a 150-day period in 2006. This research focuses on how the statistical technique can be a useful tool to examine place-based criminal justice interventions and discuss its advantages over the Knox test (a more commonly used space–time approach), as well as traditional, non-spatial evaluation methods.Footnote 1
Background
Description of Analytical Technique
A number of measures to quantify space–time clustering have been developed in geographical epidemiology as a means of identifying outbreaks via the spatial distribution of infectious disease in a given timeframe. One of the simplest and most common techniques is the Knox test, which was the first quantitative test of space–time clustering (Knox 1963). This technique was applied by Knox (1964) to identify unusual clustering of childhood leukemia in Northeast, England. Knox (1964) deemed leukemia cases as adjacent in time if two events occurred in less than 60 days and adjacent in space if they occurred within a distance of 1 km. A 2 × 2 contingency table may be plotted with this information, where X denotes the number of times leukemia cases occurred close in both time and space, N1S denotes the number of cases adjacent in space, and N1T denotes the number of cases adjacent in time (see Table 1). N represents the total number of, n, cases that can be joined in all possible n(n − 1)/2 points pairs. From this process, Knox (1964) concluded that the number of leukemia cases close in time and space exceeded what should be expected based on chance, indicating a disease transmission.
The original Knox test only allows point pairings to be placed into two space and two time categories, but an adapted Knox test has been developed to accommodate a range of spatial and temporal scales (Johnson et al. 2007a; Townsley et al. 2003; Wells et al. 2012; Wyant et al. 2012; Zhang et al. 2015). Since the Knox test includes the corresponding space–time categories for each point pairings, the Mantel (1967) test has been employed to test for statistical significance because it accommodates the dependence in observations (David and Barton 1966). The Mantel test is given by the following:
where s ij is the distance in space and t ij is the distance in time between i and j events. A z test is then employed to determine if the observed values are significantly different from expected, and a separate z score may be computed for each cell (Johnson and Bowers 2004a, b). The Mantel test is equivalent to the Knox test when s ij and t ij take the value 1 when the points i and j are close in space and time. While the Knox test is a useful and powerful tool to study space–time relationships, the spatiotemporal K-function overcomes several of its shortcomings. In particular, (1) it is less computationally intensive, (2) does not have arbitrary cut offs for selecting space and time thresholds, (3) corrects for edge effects, and (4) is more robust under a number of conditions. A description of the spatiotemporal K-function, along with how it differs from the Knox test, is discussed below.
The spatiotemporal K-function offers a similar, but more flexible approach to studying space–time clustering. Since the technique computes estimates over a range of pre-defined spatial and temporal buffers simultaneously, it overcomes the problem of the Knox test that arises due to the selection of arbitrary cut offs (McNally et al. 2012; Picado et al. 2007). While the adapted Knox test improves upon this limitation as well, estimates for each scale must be computed separately through multiple tests (Ye et al. 2015). This is in contrast with the spatiotemporal K-function, which is less computationally intensive since it treats space and time continuously in a single test. As Diggle et al. (1995) describe the computation of the spatiotemporal K-function:
[T]he estimate of the second-order properties of the process is closely related to Knox’s statistic X, but interpreted as a function of spatial and temporal separation rather than for a fixed pair of threshold values [for space] and [time]. This interpretation provides a natural way of combining information from different spatial and temporal scales, whether for estimation purposes or to construct an omnibus test of space–time clustering. (p. 125)
It expands upon Ripley’s K-function, a technique that is traditionally employed to examine the degree of clustering or dispersion among a univariate, purely spatial point pattern (Ripley 1976).
The estimation of the bivariate spatiotemporal K-function involves three components:
-
K(s) = \(\frac{1}{\lambda }\) E[number of type j events within distance, s, of an arbitrary type i event]
-
K(t) = \(\frac{1}{\lambda }\) E[number of type j events within time, t, of an arbitrary type i event]
-
K(s, t) = \(\frac{1}{\lambda }\) E[number of type j events within distance, s, and time, t, of an arbitrary type i event]
where λ is the expected number of events per unit space per unit time, s is the user-specified distance from point i event to point j event, and t is the duration of time after event i. The number of events (N) and the area (A) may be used under the assumptions of homogeneity to estimate the intensity of the point pattern λ = N/A.
Figure 1 presents elements of K(s). The estimation of K(s) for the example of SQFs described below would be calculated only for SQFs falling within the bounding window around the area of interest, A. The spatial clustering of crimes (indicated by points j in Fig. 1) around SQFs (indicated by points i) is then examined within a given radial distance, s, of where the SQF occurred. The estimation of K(s) is only computed using information of where these events occurred irrespective of when they occurred. The elements in Fig. 1 are similar to K(s, t), but time is incorporated by having points i and j that are used in the estimation drawn from different time periods with a given lag time, t. For instance, a 2-day time lag would mean that only crime events occurring 2 days after an SQF occurrence and within the given radius would be used in the computation.

Elements of Ripley’s K-function estimation
\(\hat{K}(s)\), \(\hat{K}(t)\), and \(\hat{K}(s,t)\) are given by
and
If these point patterns are independent, \(\hat{K}(s,t)\) = \(\hat{K} (s)\hat{K} (t)\). Spatial and temporal edge effects are calculated separately. The weights, \(w_{ij}\), represent a correction for edge effects in estimating second-order properties, and the weights, \(v_{ij}\), serve the same role for the estimation of temporal properties (Lotwick and Silverman 1982; Ripley 1982).
As noted, a benefit of the spatiotemporal K-function over the Knox and Mantel tests is its ability to account for edge effects, which can affect statistical inference (Lynch 2006; Picado et al. 2007). Censoring bias (due to the inability of observing the full extent of an object that lies partially within the sampling window) and sampling bias (due to the likelihood of observing an object being dependent upon its size or shape) are two of these validity threats (Baddeley 1998). There are a number of edge corrections for estimating K. The isotropic correction originally proposed by Ripley is perhaps the most common, where the weight function, \(w_{ij}\), provides the edge correction. If the search circle with radius s falls completely within bounding window A, then \(w_{ij}\) has a value of 1. If part of the search circle falls outside the bounding window, then \(w_{ij}\) is proportional to the circumference of the part of the circle that falls within the bounding window (Lee et al. 2013). As with the univariate K-function, this correction can be employed to obtain K-estimates that are unbiased by edge effects (Pélissier and Goreaud 2015).Footnote 2 Due to the border correction, \(\hat{K}_{ij} (s,t)\) and \(\hat{K}_{ji} (s,t)\) are highly correlated but not identical (Arbia et al. 2008).
Instead of analyzing cross-correlations, the spatial and temporal dependence between the point patterns is assessed using the spatiotemporal K-function with the derived function:
\(\hat{D}_{0} (s,t)\) represents the portion of the space–time correlation that remains after correction for purely spatial and purely temporal correlations, and it is a global measure that defines the scale and nature of the dependence between type j and i events. A \(\hat{D}_{0} (s,t)\) value of 1 is considered a strong space–time interaction or a doubling of the risk of a point j type event following a type i event (Diggle, personal communication, February 11, 2014; Lynch and Moorcroft 2008; Poljak et al. 2010; Sanchez et al. 2005).
The results between the spatiotemporal K-function and adapted Knox test may be similar (Ye et al. 2015), but are different under certain conditions. The Knox and Mantel tests tend to be more similar to the K-function when the possibility for edge effects is deemed low (such as with short distances, d) (Townsley et al. 2003) or when adequate statistical controls can be employed to overcome boundary problems (Johnson and Bowers 2004a). A study that compared the results of the spatiotemporal K-function and adapted Knox found that larger differences between the two techniques are expected when “the space and time spans go beyond half size of the study area and half of the study time period […] in order to generate large enough distortion for different boundary definitions to make a difference” (Ye et al. 2015, p. 213).
Dissimilar results may also arise under circumstances where the spatiotemporal K-function is more robust. First, the adapted Knox test is sensitive to seasonality, and requires the user to manually control for effects of weather (Johnson et al. 2007b). In contrast, \(\hat{D}_{0} (s,t)\) automatically eliminates correlations between the point patterns attributed to both temporal (e.g. weather) and spatial (e.g., elevation) covariates (Lynch and Moorcroft 2008). Second, Knox tests that use the Chi squared (Knox 1963) or Poisson (Knox 1964) tests to identify space–time interactions are at risk of overestimating statistical significance; the interaction between space and time are compounded with these tests as sample size increases (Levine 2004). The consequences of violating the assumption of independence exacerbates this issue because the unit of analysis in the Knox test is the point pair (not a single event), with each point contributing to n − 1 of the pairs considered (Grubesic and Mack 2008; Johnson et al. 2007a, b). Third, unlike the Knox and Mantel tests (Malizia 2012), another benefit of the spatiotemporal K-function is that it “is likely to be robust [to missing data] unless the underreporting [of said point patterns] is severe and confined to specific spatial locations and times” (French et al. 2006, p. 3).
Application of Space–Time Clustering Analyses
While limited, the use of an adapted Knox test to diagnose space–time clustering in criminology is increasing. It is most frequently implemented to test the near-repeat victimization hypothesis (Johnson and Bowers 2004a, b; Townsley et al. 2003; Zhang et al. 2015), particularly with residential burglary risk. Johnson and Bowers (2004a), for example, show that repeat burglaries tend to cluster within 2 months and 300–400 m of a given burglary. Grubesic and Mack (2008) compare the degree of spatial–temporal clustering among different crime types. They find strong spatial–temporal hot spots of burglaries (<650 m within 14 days), assaults (<161 m within 9 days), and robberies (>600 and <2500 m within 1 and 8 thru 14 days) within time and space. Wells et al. (2012) find that near-repeat gun assaults cluster in small spatial distances within a 28-day period. Lastly, Wyant et al. (2012) use the adapted Knox test to demonstrate police firearm suppression effects up to two blocks away from a firearm arrest (<6 days).
Applications of the spatiotemporal K-function are most commonly found in geographic epidemiology to study the transmission of disease across space and time. For example, French et al. (2005) use the approach to determine if spatial and temporal patterns interact to produce space–time clustering of equine grass sickness cases, whereas McNally et al. (2009) test the hypothesis that environmental factors contribute to primary biliary cirrhosis disease cases. Lynch and Moorcroft (2008) employ the space–time K-function to determine if western spruce budworm infestations affect the likelihood of a forest fire. Other studies apply the technique to explore the spread of foot-and-mouth disease (Picado et al. 2007; Wilesmith et al. 2003), outbreaks of bursal disease in broiler chicken farms (Sanchez et al. 2005), patterns of occurrence that would suggest infectious origin of type 1 diabetes (Zhao et al. 2002), and the transmission of porcine circovirus associated disease (Poljak et al. 2010) and Legionaries’ disease cases (Bhopal et al. 1992). A review of the literature did not find any applications of a bivariate spatiotemporal K-function in criminology.
Hypothesis Testing
Since approaches for testing null hypothesis correspond to different frameworks, it is important to select a relevant null hypothesis as it can change the interpretation of spatial relationships (Goreaud and Pélissier 2003). Two common methods for testing a null hypothesis with the bivariate extension of Ripley’s K are random labeling and independence (Diggle 1983; Dixon 2002). Marcon et al. (Forthcoming) describe the differences in assumptions (see Goreaud and Pélissier 2003 for further discussion):
The random labeling hypothesis considers that points preexist and their marks are the result of a process to test (e.g. are dead trees independently distributed in a forest?). The population independence one considers that points belong to two different populations with their own spatial structure and wants to test whether they are independent from each other. (p. 3)
Random labeling is induced by the random permutation of times, t i = 1, …, n, from the observed distribution (x and y coordinates held constant). For instance, random labeling assumes that different processes generate the patterns of SQFs and crimes, and under this method, the time of occurrence labels (day of year in this case) are randomly shuffled while holding the x–y coordinates of the SQFs constant. Departure from independence in this instance signifies that an interaction exists between SQFs and crime that displays attraction or repulsion. A number of studies have undertaken hypothesis testing using random labeling over a range of distances with the K statistic (Diggle et al. 1995; Gatrell et al. 1996; Lynch and Moorcroft 2008; Picado et al. 2007) and the adapted Knox test (Grubesic and Mack 2008; Johnson et al. 2009; Ratcliffe and Rengert 2008; Wells et al. 2012; Wyant et al. 2012).
Alternatively, independence testing randomizes the relative position of the points for each Monte Carlo simulation of envelopes at every distance lag, s (Lotwick and Silverman 1982). The simulation envelopes generated are applied in a two-sided fashion, and the null hypothesis is rejected when the observed patterns fall below or above the envelope (Dixon 2002). As such, independence hypothesis testing assumes that the process of assigning labels to SQFs acts independently of the locations of crimes, and departure from this is conditioned on the locations of events of the independent population (De La Cruz et al. 2008). Accordingly, this process would be induced by displacing all the locations of SQFs by a randomly chosen distance while holding the location of crimes fixed (Arbia et al. 2015).
A concern has been raised by Loosmore and Ford (2006) regarding the use of randomization for hypothesis testing with spatial point patterns, such as with the K statistic. They contend that the “use of CSR [complete spatial randomness] as a null model is uninformative in that no spatial processes are truly random” (p. 1929). They go on to demonstrate that a hypothesized spatial model calculated from CSR significantly underestimates the expected type I error rate—and the estimation of simulation envelopes over a range of distances (such as with the spatiotemporal K-function and adapted Knox test) to determine if the observed pattern deviates from the hypothesized model is also questionable. Loosmore and Ford (2006) present an example in prior research where the authors constructed 95th percentile confidence intervals (CI) using simulation, and 74 of 99 of those simulations of CSR contributed to the upper or lower CI for at least one spatial lag. This makes the type I error rate ~74 %, not the nominal 5 % that is expected. The type I error rate is also incorrect when inferring scale, such as a range of spatial distances, since “results at any distance reflect both the instantaneous value at that distance as well as the combined results from small distances […] Results for an observed pattern could therefore lie outside the envelope at a distance where the instantaneous value was not different than the specified model” (p. 1927). The use of the Bonferroni correction, which is sometimes employed to deal with the issue of multiple testing, is inappropriate for addressing the incorrect type I error rate since “both the correlation between results at consecutive distances which violates the assumption of independence, as well as the large number of distances being simultaneously evaluated” (p. 1927).
One way to preserve the type I error rate is to use an approach proposed by Loosmore and Ford (2006), which is to collapse down the information into a single statistic. A limitation of this approach, however, is that information on what spatial scale might be driving significant results is lost since only a single statistic is provided. Given these considerations, a method of hypothesis testing should be chosen when using the K estimate (or adapted Knox test) that is theoretically relevant and preserves the nominal type I error rate. We discuss such a method below.
Data and Methods
To provide an example of this method, the present study draws upon data from a study of SQF practices in NYC (Rosenfeld et al. 2012). SQF refers to instances in which an officer, typically as part of normal patrol, stops an individual and requests some information. These periods of detainment sometimes (but not always) involve a frisk of the individual for weapons. SQFs are sometimes called Terry stops, because the 1968 Supreme Court decision in Terry v. Ohio gave officers the right to stop and detain a person when there was reasonable suspicion that he or she was in the act of committing a crime or about to commit a crime (see Jones-Brown et al. 2010). SQFs have become extremely controversial, leading some scholars to argue that it is likely doing more harm than good (e.g. see Fagan et al. 2010). The approach has been criticized for targeting the young, minorities, and specific neighborhoods of the city (see Gelman et al. 2007; Ridgeway 2007; Stoud et al. 2011). SQFs in NYC provide an appropriate case for illustrating the space–time interaction method because they are targeted at specific places, and they are strongly confounded in space and time with crime (Weisburd et al., under review).
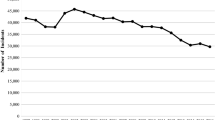
The specific focus of this research is a sample of cases drawn from a 150-day period in the Bronx, NYC in 2006. The analyses are limited to a specific time period and one NYC borough to make the computation and presentation of the analyses manageable. At the time of this study, the crime rate was higher in the Bronx than NYC citywide (5.44 vs 5.01 per 1000 people) (New York City Police Department 2014). The data included all non-traffic related crime incidents and SQFs that occurred in NYC for the time period of interest. The dataset provided includes x–y coordinates of SQFs and crime incidents, as well as their dates of occurrences.Footnote 3 Figure 2 presents a map of these crime incidents and SQFs by street segment. This 150-day study period had 45,027 crime incidents and 32,600 SQFs in the Bronx, for a total of 77,627 events. A time series plot of the total number of SQFs and crime incidents each day during the study period is presented in Fig. 3. The New York penal law classifications of the crime incidents were as follows: 13.8 % minor violations, 60.4 % misdemeanors, and 25.8 % felonies.

Spatial distribution crime incidents and non-confounded SQFs in the Bronx (Jan–Jun 2006)

Trends in crime incidents and SQFs in the Bronx (Jan–Jun 2006)
Estimation of Spatiotemporal K-Function
The following section describes the specifications of the spatiotemporal K-function that was computed to examine the likelihood of a crime incident following an SQF in space and time at a micro-scale. Detail is also provided on the two informative null spatial patterns to which this distribution is compared. Inferences will be made with these hypothesized models because they are more theoretically relevant than a distribution based on Monte Carlo/random labeling methods and do not suffer from incorrect type I error rate performance discussed by Loosmore and Ford (2006). All analyses were computed using the splancs package in R (R Development Core Team 2005) and K1D software (Gavin et al. 2006, 2008).Footnote 4 , Footnote 5
Average K-Function on Days with an SQF
\(\hat{D}_{SC} (s,t)\) represents the increased risk of a crime event due to an SQF at a spatial distance s and time lag t, where i is the SQF event and j is the crime incident. Simply put, the estimate provides an indication of the average likelihood of a crime event at various distances immediately surrounding an SQF the day(s) following its occurrence. \(\hat{D}_{SC} (s,t)\) was computed across a range of cut offs for the space and time dimensions. The selection of a temporal buffer was guided by literature indicating that deterrent effects of place-based interventions in targeted areas are short-term (Koper 1995; Sherman 1990; Weisburd et al. 2006) and, more specifically, by Wyant et al. (2012) (found that deterrent effects from gun arrests lasted up to 6 days). Nonetheless, the selection of the spatial and temporal buffers were exploratory given that there is limited research on the specific residual deterrent effect of SQFs (and police presence generally) at various time intervals and across space. The distance parameter, s, was estimated in 100 feet intervals that ranged from 0-feet (exact location of the SQF) to 500-feet. The maximum buffer radius is slightly longer than the average street segment in the Bronx, which is about 387 feet from intersection to intersection (Md = 284 feet; SD = 315 feet; n = 12,615 segments). The choice of these buffers related in part to the desire to limit the examination of deterrent effects to areas that would likely be clearly visible from the location of where the SQF occurred (Sherman et al. 1989; Sherman and Weisburd 1995; Weisburd and Mazerolle 1995), as well as because useful information in \(\hat{D}_{0} (s,t)\) is confined to small values of s and t relative to the spatial and temporal dimensions of A × (0, T) due to sampling fluctuations (Diggle et al. 1995). The time lag, t, increased in daily increments, ranging from 1 day (the day after the SQF) to 5 days following the SQF. These specifications produced a 5-row by 6-column array of 30 estimates.
One estimation problem in these data is that SQFs can co-occur close in space and time. Indeed, prior findings that SQFs represent a hot spots policing approach (Weisburd et al. 2014) mean that such clustering is very likely. While we recognize the importance of estimating models taking into account this clustering (see Weisburd et al. Under Review), for the purposes of illustrating the spatiotemporal K-function, we focus below on a subset of events in which we exclude any cases in which there will be multiple SQFs in the space and time buffers. In this example then, SQFs cannot be contaminated by the influence of neighboring SQFs. To do this, the Euclidean distance in space for each pair of SQFs was computed and points falling within a 250-foot buffer in the same 6-day period were removed from the dataset. This process identified 23,356 SQF events that had a subsequent SQF in the exact location within a given 6-day period, and another 4895 SQF events that had a subsequent SQF within a 250-ft distance during the same period. This left a total of 4349 SQFs that were not confounded by neighboring SQFs in time or space (see Fig. 4), which represents 13.3 % of SQF occurrences during the study period. Even though the selection of this subset may not be generalizable, it was chosen because it creates a straightforward measure of the K statistic without the complexity of potential confounding SQFs in the same area.

Trends in crime incidents and non-confounded SQFs in the Bronx (Jan–Jun 2006)
Average K-Function on Days Without an SQF
To determine if SQFs influence the likelihood of a crime incident, one option is an estimate of how much crime would be expected at these locations on days when an SQF did not occur. This null distribution has no space–time interaction and is deemed \(\hat{D}_{FC} (s,t)\). In this instance, crime incidents remain type j events but the technique also requires the user to input the time and location of type i events. Since we are interested in the likelihood of crime in the absence of a type i event, a dataset of fake type i events were generated for the analysis (x–y coordinates and corresponding time of occurrence). These events “occurred” every day a real SQF did not take place and were only generated at locations where an actual SQF occurred during the study period (based on x–y coordinates). However, since it is expected that police officers bring SQFs to areas where a crime has occurred and that there is an expected deterrent effect, dummy events were not generated on days close in time to an actual SQF occurrence (only crime levels at least 7 days before and after an SQF were assessed). As such, generating dummy type i events allows us to examine the likelihood of a crime incident in the absence of an SQF at the study locations. A subsample of 10,000 dummy events were randomly selected from this distribution for each month, and \(\hat{D}_{FC} (s,t)\) was computed with these events using actual crime incidents. This process was replicated 99 times (with replacement) and the final null distribution estimate of \(\hat{D}_{FC} (s,t)\) was taken as the mean of the 99 subsample estimates, with confidence limits derived from the 2.5 and 97.5 percentiles of the subsample distribution.Footnote 6
Average K-Function on Days Following a Crime Incident
A second benchmark, \(\hat{D}_{CC} (s,t)\), was also calculated to estimate the likelihood of a crime event following a given crime occurrence. This counterfactual was selected because police tend to respond to periods of high crime at these locations by increasing SQFs, and accordingly, the likelihood of a crime event the days following an SQF is also highly contingent upon the occurrence of a crime event. A random thinning operation (Lewis and Shedler 1979; Ogata 1981) was undertaken in which 500 crime events were retained each month and the likelihood of a crime event following these randomly selected points was estimated. The K-function is invariant over random thinning (Cressie 1993; French et al. 2005) because the retention or deletion of each point is independent of other points and the probability is proportional to the reciprocal of the estimated conditional intensity at that point (Schoenberg 2003).
To be considered for random selection, the crime event had to have taken place at locations where SQFs occurred in the present sample (based on x–y coordinates) but did not occur close in time to an actual SQF occurrence (only crime levels at least 7 days before and after an SQF were assessed).Footnote 7 This buffer was selected to ensure that effects would not be confounded by police bringing an SQF to a location as a result of a crime, nor would it be affected by residual deterrence effects from the SQF itself. A comparison of crime severity between SQF days and non-SQF days suggests that police are more likely to conduct an SQF on days when a more serious crime event has occurred, though the differences are not large: minor violation (10.0 % on an SQF versus 13.2 % on a non-SQF day), misdemeanor (65.4 vs 61.8 %), and felony (24.4 vs 25.0 %). The 500 randomly selected crime events were weighted to ensure that the severity of offenses from each subsample was similar to those on SQF days (13.2 % minor infractions, 61.8 % misdemeanor, and 25.0 % felonies). As with the prior null distribution, this process was replicated 99 times (with replacement) and the final null distribution estimate of \(\hat{D}_{CC} (s,t)\) was taken as the mean of the 99 subsample estimates. For a \(\hat{D}_{SC} (s,t)\) estimate to be considered significantly different from what should be expected, it must be an extreme value relative to \(\hat{D}_{FS} (s,t)\) and \(\hat{D}_{CC} (s,t)\).
Results
The results of the space–time K-function across time by distance lags are presented in Fig. 5. A comparison between \(\hat{D}_{SC} (s,t)\) and \(\hat{D}_{FS} (s,t)\) suggests a modest deterrent effect. The likelihood of a crime event is lower when an SQF occurred in contrast to a day a crime event occurred without an SQF across time and distance lags, with one exception (distance = 400 ft; lag = 4 days). The distribution of \(\hat{D}_{0} (s,t)\) at distance lag 0 is as follows: \(\hat{D}_{SC} (s,t)\) is 0.789, \(\hat{D}_{CC} (s,t)\) is 1.098 (CI95 = 1.088–1.107) and \(\hat{D}_{FS} (s,t)\) is 0.891 (CI95 = 0.889–0.892). This equates to the likelihood of a crime event after an SQF being roughly 30 % lower when compared to \(\hat{D}_{CC} (s,t)\) and 10 % lower when compared to \(\hat{D}_{FS} (s,t)\) (distance = 0 ft, lag = 1 day). \(\hat{D}_{SC} (s,t)\) declines until day 3 to the point where the likelihood of a crime event occurring is reduced by 42 % as compared to \(\hat{D}_{FS} (s,t)\) (CI95 = 0.886–0.890) and by 20 % as compared to \(\hat{D}_{CC} (s,t)\) (CI95 = 0.662–0.679) (distance = 0 ft, lag = 3 days). This suggests that the likelihood of a crime event following an SQF is significantly lower than any given day at these locations when an SQF did not occur and lower than when a crime event occurred without an SQF.

Cross sections of \(\hat{D}_{0} (s,t)\) distributions by distance lag across days. The confidence intervals for \(\hat{D}_{FS} (s,t)\) and \(\hat{D}_{CC} (s,t)\) would not be visible if included in this figure, but are provided in-text
A diffusion of benefits (Clarke and Weisburd 1994) effect is observed at distances within 300 feet of the SQF occurrence. But it appears to disappear by day 4. Both \(\hat{D}_{SC} (s,t)\) and \(\hat{D}_{CC} (s,t)\) experience a slight increase between days 3 and 4 (distance = 0 ft). Even though \(\hat{D}_{SC} (s,t)\) begins to increase, \(\hat{D}_{0} (s,t)\) remains below \(\hat{D}_{CC} (s,t)\) on day 4 and day 5 (distance = 0 ft). \(\hat{D}_{SC} (s,t)\) is 0.988 and 0.736, and \(\hat{D}_{CC} (s,t)\) is 1.00 (CI95 = 0.991–1.01) and 0.859 (CI95 = 0.849–0.879) on days 4 and 5 respectively. \(\hat{D}_{SC} (s,t)\) is most likely to approximate \(\hat{D}_{FS} (s,t)\) at 4 days after an SQF occurrence (distance = 0 ft). While attenuated at larger distance lags (distance > 0 ft), similar trends in crime reductions across all days are also evident.
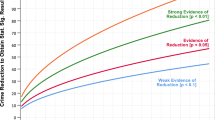
Figure 5 also suggests that the observed deterrent effect of an SQF declines the farther away from the location of the event, and appears to have negligible influence on the likelihood of a crime event at distances greater than 300 feet from where the SQF occurred. This becomes more apparent in Fig. 6, which presents the space–time K-functions across distance by time lags.

Cross sections of \(\hat{D}_{0} (s,t)\) distributions by time lags across distance. The confidence intervals for \(\hat{D}_{FS} (s,t)\) and \(\hat{D}_{CC} (s,t)\) would not be visible if included in this figure, but are provided in-text
Between days 1 and 3, \(\hat{D}_{SC} (s,t)\) is notably lower than \(\hat{D}_{CC} (s,t)\) (distance < 400 ft). These differences become less marked as distance from the location of the SQF increases, whereby an SQF appears to have no effect on crime at distances greater than 400 feet from its occurrence. On day 3 in particular, \(\hat{D}_{SC} (s,t)\) is considerably lower than both \(\hat{D}_{CC} (s,t)\) and \(\hat{D}_{FS} (s,t)\), with the likelihood of a crime event following an SQF being much lower than expected at closer distances. \(\hat{D}_{SC} (s,t)\) estimates remain below \(\hat{D}_{CC} (s,t)\) for all points of observation except on day 4, where the likelihood of a crime occurrence following an SQF being 3 %, higher than if a crime event occurred without an SQF (distance = 400 ft; lag = 4 days), \(\hat{D}_{SC} (s,t)\) = 1.101; \(\hat{D}_{CC} (s,t)\) = 1.071 (CI95 = 1.067–1.075). Other than on day 4, \(\hat{D}_{SC} (s,t)\) estimates do not experience significant increases at greater distances, suggesting that notable spatial displacement is not observed at distances within 500 feet from the location of the SQF.
Discussion
This review of the space–time relationship between SQFs and crime in the Bronx, New York has provided a descriptive example of the more general application the bivariate spatiotemporal K-function. Prior work in criminology already demonstrates that there is significant potential for obtaining new and important information from exploring space–time interactions (e.g., Dario et al. 2015; Johnson and Bowers 2004a, b; Townsley et al. 2003; Wells et al. 2012; Wyant et al. 2012; Zhang et al. 2015). While this trend is new and important, the temporal component of data in criminology is still largely ignored (Ratcliffe 2010). An understanding of spatial–temporal relationships remains one of the most under-researched areas of criminology despite its vast ability to unlock “a better theoretical understanding of the role of geography and opportunity, as well as enabling practical crime prevention solutions that are tailored to specific places” (Ratcliffe 2010, p. 5).
The spatiotemporal K-function can also offer straightforward, policy-relevant information for practice. Pease and Laycock (1999) noted that the main barrier in crime prevention is that the police must “anticipate the place and time of occurrence” (p. 2). Further research using space–time methods will help police better forecast crime events. For instance, knowledge that burglaries generally tend to cluster in the same area for at least one month before moving to other areas can be used to prospectively allocate officers to at-risk areas. As Johnson and Bowers (2004b) suggest, forward-thinking “strategies used in the deployment of police or other resources based on the identification of clusters of near repeats would more precisely match the actual (and dynamic) spatial distribution of risk than do those using traditional hot-spotting techniques” (p. 251).
The public can also minimize their likelihood for victimization if the police communicate that they are currently at an increased risk and provide them with potential precautionary measures. It can also provide information on where to target place-based crime prevention interventions more generally (Wooditch et al. 2013). The spatiotemporal K-function will help gauge the cost-effectiveness of place-based interventions by providing a more nuanced understanding of treatment effects. For example, it will be particularly useful with place-based randomized experiments, such as with hot spots policing, since it would allow for a comparison between treatment and control conditions that accommodate the spatiotemporal element of the data. With this knowledge, the Koper (1995) curve may be modified to illustrate hot spots policing effects across time and space.
Spatiotemporal models also allow us to have a more fine-grained understanding of the relationship between interventions and outcomes. For example, studies of displacement of crime have generally used catchment areas to gain a general sense of whether and to what extent place-based interventions shift crime to other areas (e.g. see Braga 2007; Green 1995; Weisburd et al. 2006; Weisburd and Green 1995). Such areas are defined in terms of distance, for example, a single block or two, or according to an average distance from a geographic point. While such approaches allow us to gain a broad understanding of potential displacement or diffusion outcomes, they do not allow us to specify the specific temporal and spatial dimensions of the movement of crime. We found that the observed deterrent effects diffuse out from the point location of SQFs not confounded in time and space, but that such diffusion does not extend beyond 300 feet or a few days from the event. These findings are consistent with the general literature suggesting that spatial displacement of crime is an uncommon result of hot spots interventions and that diffusion of crime control benefits is more likely (Bowers et al. 2011; Braga et al. 2014; Clarke and Weisburd 1994; Guerette and Bowers 2009; Weisburd et al. 2006). More important, this method provides a more nuanced and finely grained portrait of the nature of the temporal and spatial outcomes than prior research in this area.
This approach also allows us to develop credible causal inferences absent experimental data. Many place-based crime prevention programs will not be amenable to experimental manipulation. The spatiotemporal approach presented in this paper offers an opportunity to focus on time and space units to a fine degree. In other analyses, we have found that SQFs and crime in NYC are strongly co-integrated at a monthly level (Weisburd et al. Under review), meaning that it is very difficult to disentangle the causal chain that links the two types of events. Certainly, an approach that uses long time spans, such as monthly data, will have difficulty distinguishing whether SQFs influence crime, or occur because crimes are committed at specific locations, whereas a spatiotemporal approach allows us to hone in on a specific time, in our case a day, when an SQF occurs at a specific point location.
The fact that the present study could demonstrate that crime declines on average after an SQF event and within a discrete spatial area provides more convincing conclusions than a similar finding at a larger geographic or temporal scale that did not include the space–time interaction. Without an experimental manipulation of the intervention, it is not possible to establish the causality of observations with certainty. Nonetheless, the tracking of the impacts in a short time interval and within specific geographic distances makes an inference of causality plausible (see Nagin and Weisburd 2013).
The present study argues that the spatiotemporal k-function offers new insights to understanding space–time interactions in criminology. Before concluding, it is important to note specific limitations of this study in the Bronx, as well as more general limitations of the method. Regarding analyses of SQFs, it must be recognized that SQFs may not be a robust indicator of police activity since a great deal of police presence is not captured by recorded police-citizen encounters and concerns have been raised about the completeness of these data (discussed further below). The present study assumes that SQFs are a treatment factor and everything else at these locations is random (irrespective of level of presence otherwise). One limitation of the approach is that it assumes that SQFs are indicators of police activity without making assertions regarding the amount of additional police activity at these place (ranging from none to a great deal). A further extension of the approach would be to condition this effect on the amount of police presence locations receive.
More generally, the focus in this paper was to illustrate the utility of the bivariate spatiotemporal K-function for assessing crime prevention outcomes, not to provide a systematic assessment of the impacts of SQFs on crime. Our choice in this regard to examine a sub-sample of cases in the Bronx that are not confounded in space and time made computational illustrations simpler, but it limits the ability to generalize to the population of cases.
Though the technique uses well-defined local areas around x–y coordinates to examine smaller scale effects, the unit of analysis may not be ideal for theoretical development. For instance, Taylor (1997, 1998) and Weisburd et al. (2012, 2014) argue that a theoretically relevant unit of analysis to study crime at micro-places are street segments (or street blocks) because they function as behavioral settings (Wicker 1987), whereby people get to know one another and become familiar with each other’s routines. As Weisburd et al. (2012) note further, “street segments […] provide a unit of analysis that ‘fits’ with both ecological theories and opportunities theories and that is capable of illustrating both bottom-up and top-down processes producing crime events” (p. 24). This limitation may be less of a concern given that relying upon predefined spatial buffers is claimed to be free of the modifiable areal unit problem, whereby conclusions are sensitive to variations in scale (the number of boundaries used) and zoning (how boundaries are drawn) (Gehlke and Biehl 1934; Openshaw and Taylor 1979). As such, the K-function yields information on a phenomenon across a finite geographic distance rather than relying upon artificially demarcated boundaries that can be redrawn and vary in size and shape (e.g., school districts, census tracts). While boundaries of a street segment are not artificial in the same sense, there can be large differences in the length of street segments between geographic regions (e.g., street segments in NYC will be significantly shorter than those in small rural communities) (Weisburd 2015). Accordingly, the study parameters can be easily replicated in other geographic areas without differences in the scope of the unit of analysis.
While the technique offers great ability to explore space–time relationships at a microgeographic scale that does not rely on administrative boundaries, a reliance on geocoded addresses (as is often the case in the field of criminal justice) to compute the K-function is subject to bias due to the positional error of points. A common source of error is the geocoding process itself, which is the practice of locating street addresses on a network database and then assigning corresponding geographic coordinates (e.g., identifying the latitude and longitude of 123 Main Street). One study estimates that the median offset between a geocoded point and its true location is between 84 and 102 feet (Schootman et al. 2007), depending on geocoding method. This type of bias may be minimized through such measures as increasing hit rate (Zhan et al. 2006), using commercial software to geocode (Schootman et al. 2007), or selecting a more urbanized study area (Bonner et al. 2003; Cayo and Talbot 2003). Police departments can also assist researchers by improving the accuracy of reporting the location of events, such as requiring officers to consistently report the actual location of a crime incident occurring on a street segment rather than a general location (e.g., 100 block of Main St) or its nearest intersection (Tarling and Morris 2010).
As with any analyses, a potential threat to causal inference when using the space–time K-function is missing or inaccurate data. For instance, even though the NYPD is mandated by a settlement in Daniels et al. v. City of New York et al. to document stops where a frisk or more extensive search of an individual is made (Jones-Brown et al. 2010), there have been a number of concerns and substantiated claims that SQFs are underreported in NYC (New York Bar Association 2007; Rudovsky and Rosenthal 2013; Schneiderman 2013). The completeness of the current SQF data is unknown (Rosenfeld and Fornango 2014). Since there is no evidence to suggest that the underreporting of SQFs is severely confined to specific places or times, it is believed that the study findings are relatively unaffected by any systematic undercounting of SQFs by the NYPD (French et al. 2006; Schabenberger and Pierce 2001), but the strength of the findings must be tempered by the potential shortcomings of the data source.
Despite these noted limitations, the evolution of spatiotemporal methodologies is of great utility to the field. The spatiotemporal K-function is an important next step in evolving current space–time approaches, but there are still opportunities for this technique to improve. Further refinement of the spatiotemporal K-function will involve the following (see also Picado et al. 2007): (1) the ability to examine relationships in both time and space while adjusting for potential confounders (the endogeneity problem); (2) enhanced capability of the test to detect pertinent changes in spatiotemporal patterns; (3) ability to associate these patterns to certain variables of interest (such as the duration of the event rather than just its occurrence); and (4) development of a software package to estimate \(\hat{D}_{0} (s,t)\) that does not require the user to manually adjust for the time element of the data.
Conclusions
The central aim of this manuscript was to illustrate the opportunity for the spatiotemporal K-function to aid the examination of space–time relationships in criminology and for developing stronger evaluation methods for place-based interventions in crime and justice. A number of statistical methods have been used to test for and examine space–time interactions. The spatiotemporal K-function overcomes many limitations of prior approaches. The technique has proved to be a flexible and suitable approach for second-order analysis of two spatial point patterns. While the technique cannot yet control for potential confounding factors, the fine-grained view it provides of what is occurring across time at a microgeographic level allows researchers to make believable and plausible inferences. As more spatiotemporal data become available, it is important that criminologists capitalize on statistical techniques that accommodate space and time dimensions of data simultaneously. Taking advantage of new developments in spatial statistics, such as the bivariate spatiotemporal K-function, is critical to the advancement of quantitative criminology and in particular to the evaluation of place-based criminal justice interventions.
Notes
For a more general examination of SQFs in New York City and discussion of broader policy implications, see Weisburd et al. (Under review).
All events were geocoded by the NYPD, and a hit rate of 96.8 and 97.9 % was obtained for crime incidents and SQFs, respectfully. The geocoding hit rate is well above the 85 % suggested threshold for a minimal reliable geocoding rate (Ratcliffe 2004). Crime incidents involving rape and other sex crimes were not included in the analyses because the x–y coordinates were redacted by the NYPD (1 % of incidents).
\(\hat{D}_{0} (s,t)\) may be estimated exclusively in R software, but K1D was selected to calculate the unbiased estimate of K(t) due to computational efficiency (see also Bigler et al. 2007; Hu et al. 2006; Long et al. 2007; Schoennagel et al. 2007). K1D software is available from the University of Oregon, Department of Geography’s website: http://geog.uoregon.edu/envchange/pbl/software.html/.
A subset of events were analyzed from the Bronx to ensure that K-function estimates were robust against spatial heterogeneity within the study area (such as that caused by rivers, etc.).
A total of 37.2 % of crime incidents in the sample occurred at the same location as an SQF during the study period. The majority of instances when crime and SQF locations match exactly is likely due to the events co-occurring on street intersections. This inference is based on research demonstrating that the majority of SQFs and nearly a quarter of crime incidents in NYC occur at intersections (Weisburd et al. 2014). A comparison of the type of crime incidents occurring on intersections versus street segments for years 2006–2011 are as follows: personal (35.6 vs 33.9 %); property (32.9 vs 45.9 %); drugs/alcohol and prostitution (22.1 vs 13.8 %); and other (9.4 vs 6.3 %).
References
Arbia G, Espa G, Quah D (2008) A class of spatial econometric methods in the empirical analysis of clusters of firms in the space. Empir Econs 34(1):81–103
Arbia G, Espa G, Guiliani D (2015) Analysis of spatial concentration and dispersion. In: Karlsson C, Andersson M, Normal T (eds) Handbook of research methods and applications in economic geography. Edward Elgar Publishing, UK, pp 135–157
Baddeley AJ (1998) Spatial sampling and censoring. In: Kendall WS, van Lieshout MNM (eds) Stochastic geometry: likelihood and computation. Chapman & Hall/CRC, Boca Raton, pp 37–70
Bhopal RS, Diggle PJ, Rowlingson BS (1992) Pinpointing clusters of apparently sporadic Legionnaires’ disease. Brit Med J 304:1022–1027
Bigler C, Gavin DG, Gunning C, Veblen TT (2007) Drought induces lagged tree mortality in a subalpine forest in the Rocky Mountains. Oikos 116:1983–1994
Bonner MR, Han D, Nie J, Rogerson P, Vena JE, Freudenheim JL (2003) Positional accuracy of geocoded addresses in epidemiologic research. Epid 14(4):408–412
Bowers KJ, Johnson SD, Guerette RT, Summers L, Poynton S (2011) Spatial displacement and diffusion of benefits among geographically focused policing initiatives: a meta-analytical review. J Exper Criminol 7:347–374
Braga AA (2007) The effects of hot spots policing on crime. Campbell Syst Rev 1:1–27
Braga AA, Papachristos AV, Hureau DM (2014) The effects of hot spots policing on crime: an updated systematic review and meta-analysis. Just Q 31:633–663
Cayo MR, Talbot TO (2003) Positional error in automated geocoding of residential addresses. Inter J Health Geog 2(1):10
Clarke RV, Weisburd D (1994) Diffusion of crime control benefits: observations on the reverse of displacement. Crim Prev Stud 2:165–184
Cressie N (1993) Statisticals for spatial data. Wiley, New York
Dario LM, Morrow WJ, Wooditch A, Vickovic SG (2015) The point break effect: an examination of surf, crime, and transitory opportunities. Crim Just Stud. doi:10.1080/1478601X.2015.1032409
David FN, Barton DE (1966) Two space-time interaction tests for epidemicity. Brit J Prev Soc Med 20(1):44–48
De La Cruz M, Romao RL, Escudero A, Maestre FT (2008) Where do seedlings go? A spatio-temporal analysis of seedling mortality in a semi-arid gypsophyte. Ecography 31(6):720–730
Diggle PJ (1983) Statistical analysis of spatial point patterns. Academic Press, London
Diggle PJ, Chetwynd AG, Häggkvist R, Morris SE (1995) Second-order analysis of space-time clustering. Stat Meth Med Res 4(2):124–136
Dixon P (2002) Ripley’s K-function. In: El-Shaarawi AH, Piergorsch WW (eds) The encyclopedia of environmetrics. Wiley, New York, pp 1796–1803
Fagan J, Geller A, Davies G, West V (2010) Street stops and broken windows revisited. In: Rice SK, White MD (eds) Race, ethnicity, and policing: new and essential readings. New York University Press, New York, pp 309–348
Fotheringham AS, Brunsdon C, Charlton M (2000) Quantitative geography: perspectives on spatial data analysis. Sage, London
French NP, McCarthy HE, Diggle PJ, Proudman CJ (2005) Clustering of equine grass sickness cases in the United Kingdom: a study considering the effect of position-dependent reporting on the space–time K-function. Epidem Infect 133(02):343–348
French NP, Webster S, Zheng P, Fenton S, Clough H, Diggle P (2006) K-function analysis: recent developments and novel applications. In: International symposia on veterinary epidemiology and economics proceedings, ISVEE 11: Proceedings of the 11th symposium of the international society for veterinary epidemiology and economics, Cairns, Australia, Theme 4—Tools & training for epidemiologists: Spatial epidemiology session. Obtained from http://www.sciquest.org.nz/elibrary/download/64373/T4-5.1.1_-_K-function_analysis_%3A_recent_developmen.pdf?%22
Gatrell AC, Baile TC, Diggle PJ, Rowlingson BS (1996) Spatial point pattern analysis and its application in geographical epidemiology. Trans Instit Brit Geog 21:256–274
Gavin DG, Hu FS, Lertzman KP, Corbett P (2006) Weak climatic control of forest fire history during the late Holocene. Ecol 87:1722–1732
Gavin DG, Beckage B, Osborn B (2008) Forest dynamics and the growth decline of red spruce and sugar maple on Bolton Mountain, Vermont: a comparison of modeling methods. Can J For Res 38:2635–2649
Gehlke CE, Biehl K (1934) Certain effects of grouping upon the size of the correlation coefficient in census tract material. J Am Stat Assoc 29(185A):169–170
Gelman A, Fagan J, Kiss A (2007) An analysis of the New York City police department’s “stop-and-frisk” policy in the context of claims of racial bias. J Am Stat Assoc 102:813–823
Goreaud F, Pélissier R (2003) Avoiding misinterpretation of biotic interactions with the intertype K12‐function: population independence vs. random labelling hypotheses. J Veg Sci 14(5):681–692
Green L (1995) Cleaning up drug hot spots in Oakland, California: the displacement and diffusion effects. Just Q 12(4):737–754
Grubesic TH, Mack EA (2008) Spatio-temporal interaction of urban crime. J Quant Crim 24:285–306
Guerette RT, Bowers KJ (2009) Assessing the extent of crime displacement and diffusion of benefits: a review of situational crime prevention evaluations. Criminology 47:1331–1368
Hu FS, Brubaker LB, Gavin DG, Higuera PE, Lynch JA, Rupp TS, Tinner W (2006) How climate and vegetation influence the fire regime of the Alaskan Boreal biome: the Holocene perspective. Mitig Adapt Strat Glob Chang 11:829–846
Johnson SD, Bowers KJ (2004a) The stability of space-time clusters of burglary. Brit J Crim 44(1):55–65
Johnson SD, Bowers KJ (2004b) The burglary as clue to the future the beginnings of prospective hot-spotting. Euro J Crim 1(2):237–255
Johnson SD, Bernasco W, Bowers KJ, Elffers H, Ratcliffe J, Rengert G, Townsley M (2007a) Space–time patterns of risk: a cross national assessment of residential burglary victimization. J Quant Crim 23(3):201–219
Johnson, SD, Birks DJ, McLaughlin L, Bowers KJ, Pease K (2007b) Prospective crime mapping in operational context: final report. UCL, Jill Dando Institute of Crime Science
Johnson SD, Summers L, Pease K (2009) Offender as forager? A direct test of the boost account of victimization. J Quant Crim 25:181–200
Jones-Brown DD, Gill J, Trone J (2010) Stop, question & frisk policing practices in New York City: a primer. Center on Race, Crime and Justice, John Jay College of Criminal Justice
Knox G (1963) Detection of low intensity epidemicity. Brit J Prev Soc Medic 17:121–127
Knox G (1964) The detection of space-time interactions. Appl Stat 13:25–29
Koper CS (1995) Just enough police presence: reducing crime and disorderly behavior by optimizing patrol time in crime hot spots. Just Q 12(4):649–672
Lee JSW, Kulperger RJ, Yu H (2013) An R package for large-scale spatial analysis with parallel computing. The University of Western Ontario, London, ON, Canada. http://www.statistics.gov.hk/wsc/IPS031-P2-S.pdf
Levine N (2004) CrimeStat III: a spatial statistics program for the analysis of crime incident locations (version 3.0). Houston, TX: Ned Levine & Associates/National Institute of Justice, Washington, DC
Lewis P, Shedler G (1979) Simulation of nonhomogeneous poisson processes by thinning. Navel Res Logis Quart 26:403–413
Long CJ, Whitlock C, Bartlein PJ (2007) Holocene vegetation and fire history of the Coast Range, western Oregon, USA. The Holocene 17:917–926
Loosmore NB, Ford ED (2006) Statistical inference using the G or K point pattern spatial statistics. Ecol 87(8):1925–1931
Lotwick HW, Silverman BW (1982) Methods for analysing spatial processes of several types of points. J R Stat Soc Ser B(44):406–413
Lynch H (2006) Spatiotemporal dynamics of insect-fire interactions. Dissertation. Harvard University, Cambridge
Lynch HJ, Moorcroft PR (2008) A spatiotemporal Ripley’s K-function to analyze interactions between spruce budworm and fire in British Columbia, Canada. Can J For Res 38(12):3112–3119
Malizia N (2012) The effect of data inaccuracy on tests of space-time interaction. Geoda Center for Geospatial Analysis and Computation, School of Geographical Sciences and Urban Planning, Arizona State University. http://geodacenter.asu.edu/drupal_files/2012-02.pdf
Mantel, N (1967) The detection of disease clustering and a generalized regression approach. Cancer Res 27(2 Part 1):209–220
McNally RJ, Ducker S, James OF (2009) Are transient environmental agents involved in the cause of primary biliary cirrhosis? Evidence from space–time clustering analysis. Hepatology 50(4):1169–1174
McNally RJ, James PW, Picton SV, McKinney PA, van Laar M, Feltbower RG (2012) Space-time clustering of childhood central nervous system tumours in Yorkshire, UK. BMC Cancer 12(1):13
Nagin DS, Weisburd D (2013) Evidence and public policy. Criminol Pub Pol 12:651–679
New York Bar Association (2007) Report on the NYPDs stop-question-frisk policy. http://www2.nycbar.org/pdf/report/uploads/20072495-StopFriskReport.pdf
New York City Police Department (2014) NYC Crime Map for January 1, 2014 to May 31st, 2014. http://maps.nyc.gov/crime/ on July 20th, 2014
Ogata Y (1981) On lewis’ simulation method for point processes. IEEE Trans Infor Theor 17:23–31
Openshaw S, Taylor PJ (1979) A million or so correlation coefficients: three experiments on the modifiable areal unit problem. Stat App Spat Sci 21:127–144
Pease K, Laycock G (1999) Revictimisation: reducing the heat on hot victims. Australian Institute of Criminology, Canberra, pp 1–6
Pélissier R, Goreaud F (2015) A fast unbiased implementation of the K-function family for studying spatial point patterns in irregular-shaped sampling windows. J Stat Soft 63:1–18
Picado A, Guitian FJ, Pfeiffer DU (2007) Space–time interaction as an indicator of local spread during the 2001 FMD outbreak in the UK. Prev Veter Med 79(1):3–19
Poljak Z, Dewey CE, Rosendal T, Friendship RM, Young B, Berke O (2010) Spread of porcine circovirus associated disease (PCVAD) in Ontario (Canada) swine herds: part I. Exploratory spatial analysis. BMC Veter Res 6(1):59
R Development Core Team (2005) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna http://www.R-project.org
Ratcliffe JH (2004) Geocoding crime and a first estimate of a minimum acceptable hit rate. Inter J Geog Info Sci 18(1):61–72
Ratcliffe JH (2010) Crime mapping: Spatial and temporal challenges. In: Weisburd D, Piquero A (eds) Handbook of quantitative criminology. Springer, New York, pp 5–24
Ratcliffe JH, Rengert GF (2008) Near-repeat patterns in Philadelphia shootings. Secur J 21:58–76
Ridgeway G (2007) Analysis of racial disparities in the New York Police Department’s stop, question, and frisk practices. Rand Corporation
Ripley BD (1976) The second-order analysis of stationary point processes. J App Prob 13:255–266
Ripley BD (1982) Edge effects in spatial stochastic processes. In: Ranneby B (ed) Statistics in theory and practice. Swedish University of Agricultural Sciences, Umea, pp 247–262
Rosenfeld R, Fornango R (2014) The impact of police stops on precinct robbery and burglary rates in New York City, 2003–2010. Just Q 31(1):96–122
Rosenfeld R, Chauhan P, Weisburd D (2012) The impact of NYPD’s SQF strategy on crime rates. Report prepared for the Open Society Foundations
Rudovsky D, Rosenthal L (2013) The constitutionality of stop-and-frisk in New York City. U Penn Law Rev Online 162:5
Sanchez J, Stryhn H, Flensburg M, Ersbøll AK, Dohoo I (2005) Temporal and spatial analysis of the 1999 outbreak of acute clinical infectious bursal disease in broiler flocks in Denmark. Prev Veter Med 71:209–223
Schabenberger O, Pierce FJ (2001) Contemporary statistical models for the plant and soil sciences. CRC Press, Boca Raton
Schneiderman ET (2013) A report on arrests arising from the New York City Police Department’s stop-and-frisk practices. New York State Office of the Attorney General, New York
Schoenberg FP (2003) Multidimensional residual analysis of point process models for earthquake occurrences. J Am Stat Assoc 98:789–798
Schoennagel T, Veblen TT, Kulakowski D, Holz A (2007) Multidecadal climate variability and interactions among Pacific and Atlantic sea surface temperature anomalies affect subalpine fire occurrence, western Colorado (USA). Ecol 88(11):2891–2902
Schootman M, Sterling DA, Struthers J, Yan Y, Laboube T, Emo B, Higgs G (2007) Positional accuracy and geographic bias of four methods of geocoding in epidemiologic research. Ann Epid 17(6):464–470
Sherman LW (1990) Police crackdowns: initial and residual deterrence. Crim Just 12:1–48
Sherman LW, Weisburd D (1995) General deterrent effects of police patrol in crime “hot spots”: a randomized, controlled trial. Just Q 12(4):625–648
Sherman LW, Gartin PR, Buerger ME (1989) Hot spots of predatory crime: routine activities and the criminology of place. Criminology 27(1):27–56
Stoud BG, Fine M, Fox M (2011) Growing up policed in the age of aggressive policing policies. John Jay College of Criminal Justice, New York
Tarling R, Morris K (2010) Reporting crime to the police. Brit J Crim 50(3):474–490
Taylor RB (1997) Social order and disorder of street blocks and neighborhoods: ecology, microecology, and the systemic model of social disorganization. J Res Crim Delinq 34:113–155
Taylor RB (1998) Crime and small-scale places: what we know, what we can prevent, and what else we need to know. In: Taylor RB et al. (eds) Crime and place: plenary papers of the 1997 conference on criminal justice research and evaluation. National Institute of Justice, Washington, pp 1–22
Townsley M, Homel R, Chaseling J (2003) Infectious burglaries: a test of the near repeat hypothesis. Brit J Crim 43(3):615–633
Weisburd D (2015) The law of crime concentrations and the criminology of place. Criminology 53(2):133–157
Weisburd D, Green L (1995) Measuring immediate spatial displacement: methodological issues and problems. In: Eck J, Weisburd D (eds) Crime and place. Crime Prevention Studies, vol 4. Criminal Justice Press, Monsey, pp 349–361
Weisburd D, Mazerolle LG (1995) Measuring immediate spatial displacement: methodological issues and problems. Unpublished manuscript
Weisburd D, Wyckoff LA, Ready J, Eck JE, Hinkle JC, Gajewski F (2006a) Does crime just move around the corner? A controlled study of spatial displacement and diffusion of crime control benefits. Criminology 44:549–592
Weisburd D, Groff ER, Yang SM (2012) The criminology of place: street segments and our understanding of the crime problem. Oxford University Press, New York
Weisburd D, Telep CW, Lawton BA (2014) Could innovations in policing have contributed to the New York City crime drop even in a period of declining police strength?: the case of stop, question and frisk as a hot spots policing strategy. Just Q 31(1):129–153
Weisburd D, Wooditch A, Weisburd S, Yang SM (under review) Do stop-question-frisk practices deter crime? Evidence at micro units of space and time. Revise and resubmit at Criminology and Public Policy
Weisburd D, Wyckoff LA, Ready J, Eck JE, Hinkle JC, Gajewski F (2006b) Does crime just move around the corner? A controlled study of spatial displacement and diffusion of crime control benefits. Criminology 44:549–592
Wells W, Wu L, Ye X (2012) Patterns of near-repeat gun assaults in Houston. J Res Crim Delinq 49:86–212
Wicker AW (1987) Behavior settings reconsidered: temporal stages, resources, internal dynamics, context. In: Stokels D, Altman I (eds) Handbook of environmental psychology. Wiley-Interscience, New York, pp 613–653
Wilesmith JW, Stevenson MA, King CB, Morris RS (2003) Spatio-temporal epidemiology of foot-and-mouth disease in two counties of Great Britain in 2001. Prevent Veter Med 61(3):157–170
Wooditch A, Lawton B, Taxman FS (2013) The geography of drug abuse epidemiology among probationers in Baltimore. J Drug Iss 43(2):231–249
Wyant BR, Taylor RB, Ratcliffe JH, Wood J (2012) Deterrence, firearm arrests, and subsequent shootings: a micro-level spatio-temporal analysis. Just Q 29(4):524–545
Ye X, Xu X, Lee J, Zhu X, Wu L (2015) Space–time interaction of residential burglaries in Wuhan, China. Appl Geog 60:210–216
Zhan FB, Brender JD, De Lima I, Suarez L, Langlois PH (2006) Match rate and positional accuracy of two geocoding methods for epidemiologic research. Ann Epid 16(11):842–849
Zhang Y, Zhao J, Ren L, Hoover L (2015) Space–time clustering of crime events and neighborhood characteristics in Houston. Crim Just Rev 1–21. doi:10.1177/0734016815573309
Zhao HX, Moyeed RA, Stenhouse EA, Demaine AG, Millward BA (2002) Space–time clustering of childhood Type 1 diabetes in Devon and Cornwall, England. Diab Med 19(8):667–672
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Wooditch, A., Weisburd, D. Using Space–Time Analysis to Evaluate Criminal Justice Programs: An Application to Stop-Question-Frisk Practices. J Quant Criminol 32, 191–213 (2016). https://doi.org/10.1007/s10940-015-9259-4
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10940-015-9259-4