
Abstract
Nonconvex optimization arises in many areas of computational science and engineering. However, most nonconvex optimization algorithms are only known to have local convergence or subsequence convergence properties. In this paper, we propose an algorithm for nonconvex optimization and establish its global convergence (of the whole sequence) to a critical point. In addition, we give its asymptotic convergence rate and numerically demonstrate its efficiency. In our algorithm, the variables of the underlying problem are either treated as one block or multiple disjoint blocks. It is assumed that each non-differentiable component of the objective function, or each constraint, applies only to one block of variables. The differentiable components of the objective function, however, can involve multiple blocks of variables together. Our algorithm updates one block of variables at a time by minimizing a certain prox-linear surrogate, along with an extrapolation to accelerate its convergence. The order of update can be either deterministically cyclic or randomly shuffled for each cycle. In fact, our convergence analysis only needs that each block be updated at least once in every fixed number of iterations. We show its global convergence (of the whole sequence) to a critical point under fairly loose conditions including, in particular, the Kurdyka–Łojasiewicz condition, which is satisfied by a broad class of nonconvex/nonsmooth applications. These results, of course, remain valid when the underlying problem is convex. We apply our convergence results to the coordinate descent iteration for non-convex regularized linear regression, as well as a modified rank-one residue iteration for nonnegative matrix factorization. We show that both applications have global convergence. Numerically, we tested our algorithm on nonnegative matrix and tensor factorization problems, where random shuffling clearly improves the chance to avoid low-quality local solutions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we consider (nonconvex) optimization problems in the form of
where variable \(\mathbf{x}=(\mathbf{x}_1,\ldots ,\mathbf{x}_s)\in \mathbb {R}^n\) has s blocks, \(s\ge 1\), function f is continuously differentiable, functions \(r_i\), \(i=1,\ldots ,s\), are proximableFootnote 1 but not necessarily differentiable. It is standard to assume that both f and \(r_i\) are closed and proper and the sets \({\mathcal {X}}_i\) are closed and nonempty. Convexity is not assumed for f, \(r_i\), or \({\mathcal {X}}_i\). By allowing \(r_i\) to take the \(\infty \)-value, \(r_i(\mathbf{x}_i)\) can incorporate the constraint \(\mathbf{x}_i\in {\mathcal {X}}_i\) since enforcing the constraint is equivalent to minimizing the indicator function of \({\mathcal {X}}_i\), and \(r_i\) can remain proper and closed. Therefore, in the remainder of this paper, we do not include the constraints \(\mathbf{x}_i\in {\mathcal {X}}_i\). The functions \(r_i\) can incorporate regularization functions, often used to enforce certain properties or structures in \({\mathbf {x}}_i\), for example, the nonconvex \(\ell _p\) quasi-norm, \(0\le p< 1\), which promotes solution sparsity.
Special cases of (1) include the following nonconvex problems: \(\ell _p\)-quasi-norm (\(0\le p< 1\)) regularized sparse regression problems [10, 32, 42], sparse dictionary learning [1, 40, 62], matrix rank minimization [50], matrix factorization with nonnegativity/sparsity/orthogonality regularization [27, 33, 47], (nonnegative) tensor decomposition [29, 57], and (sparse) higher-order principal component analysis [2].
Due to the lack of convexity, standard analysis tools such as convex inequalities and Fejér-monotonicity cannot be applied to establish the convergence of the iterate sequence. The case becomes more difficult when the problem is nonsmooth. In these cases, convergence analysis of existing algorithms is typically limited to objective convergence (to a possibly non-minimal value) or the convergence of a certain subsequence of iterates to a critical point. (Some exceptions will be reviewed below.) Although whole-sequence convergence is almost always observed, it is rarely proved. This deficiency abates some widely used algorithms. For example, KSVD [1] only has nonincreasing monotonicity of its objective sequence, and iterative reweighted algorithms for sparse and low-rank recovery in [17, 32, 41] only has subsequence convergence. Some other methods establish whole sequence convergence by assuming stronger conditions such as local convexity (on at least a part of the objective) and either unique or isolated limit points, which may be difficult to satisfy or to verify. In this paper, we aim to establish whole sequence convergence with conditions that are provably satisfied by a wide class of functions.
Block coordinate descent (BCD) (more precisely, block coordinate update) is very general and widely used for solving both convex and nonconvex problems in the form of (1) with multiple blocks of variables. Since only one block is updated at a time, it has a low per-iteration cost and small memory footprint. Recent literature [8, 26, 38, 43, 48, 51, 53] has found BCD as a viable approach for “big data” problems.
1.1 Proposed Algorithm
In order to solve (1), we propose a block prox-linear (BPL) method, which updates a block of variables at each iteration by minimizing a prox-linear surrogate function. Specifically, at iteration k, a block \(b_k\in \{1,\ldots ,s\}\) is selected and \(\mathbf{x}^k=(\mathbf{x}_1^k,\ldots ,\mathbf{x}_s^k)\) is updated as follows: for \(i=1,\ldots ,s\),
where \((\mathbf{x}_{\ne i}^{k-1},\hat{\mathbf{x}}_i^k)\) denotes the point \((\mathbf{x}_1^{k-1},\ldots ,\mathbf{x}_{i-1}^{k-1},\hat{\mathbf{x}}_i^k, \mathbf{x}_{i+1}^{k-1},\ldots ,\mathbf{x}_{s}^{k-1})\), \(\alpha _k>0\) is a stepsize and \(\hat{{\mathbf {x}}}_i^k\) is the extrapolation
where \(\omega _k\ge 0\) is an extrapolation weight and \({{\mathbf {x}}}_i^{{\mathrm {prev}}}\) is the value of \(\mathbf{x}_i\) before it was updated to \({{\mathbf {x}}}_i^{k-1}\). The framework of our method is given in Algorithm 1. At each iteration k, only the block \(b_k\) is updated.

While we can simply set \(\omega _k=0\), appropriate \(\omega _k>0\) can speed up the convergence; we will demonstrate this in the numerical results below. We can set the stepsize \(\alpha _k=\frac{1}{\gamma L_k}\) with any \(\gamma >1\), where \(L_k>0\) is the Lipschitz constant of \(\nabla _{{\mathbf {x}}_i}f({\mathbf {x}}_{\ne i}^{k-1}, {\mathbf {x}}_i)\) about \({\mathbf {x}}_i\). When \(L_k\) is unknown or difficult to bound, we can apply backtracking on \(\alpha _k\) under the criterion:
1.2 Special Cases
When there is only one block, i.e., \(s=1\), Algorithm 1 reduces to the well-known (accelerated) proximal gradient method (e.g., [7, 22, 44]). When the update block cycles from 1 through s, Algorithm 1 reduces to the cyclic block proximal gradient (Cyc-BPG) method in [8, 61]. We can also randomly shuffle the s blocks at the beginning of each cycle. We demonstrate in Sect. 3 that random shuffling leads to better numerical performance. When the update block is randomly selected following the probability \(p_i>0\), where \(\sum _{i=1}^sp_i=1\), Algorithm 1 reduces to the randomized block coordinate descent method (RBCD) (e.g., [37, 38, 43, 51]). Unlike these existing results, we do not assume convexity.
In our analysis, we impose an essentially cyclic assumption—each block is selected for update at least once within every \(T\ge s\) consecutive iterations—otherwise the order is arbitrary. Our convergence results apply to all the above special cases except RBCD, whose convergence analysis requires different strategies; see [38, 43, 51] for the convex case and [37] for the nonconvex case.
1.3 Kurdyka–Łojasiewicz Property
To establish whole sequence convergence of Algorithm 1, a key assumption is the Kurdyka–Łojasiewicz (KL) property of the objective function F.
A lot of functions are known to satisfy the KL property. Recent works [4, section 4] and [61, section 2.2] give many specific examples that satisfy the property, such as the \(\ell _p\)-(quasi)norm \(\Vert {\mathbf {x}}\Vert _p\) with \(p\in [0,+\infty ]\), any piecewise polynomial functions, indicator functions of polyhedral set, orthogonal matrix set, and positive semidefinite cone, matrix rank function, and so on.
Definition 1
(Kurdyka–Łojasiewicz property) A function \(\psi (\mathbf{x})\) satisfies the KL property at point \(\bar{\mathbf{x}}\in \mathrm {dom}(\partial \psi )\) if there exist \(\eta >0\), a neighborhood \({\mathcal {B}}_\rho (\bar{\mathbf{x}})\triangleq \{{\mathbf {x}}:\Vert {\mathbf {x}}-\bar{{\mathbf {x}}}\Vert <\rho \}\), and a concave function \(\phi (a)=c\cdot a^{1-\theta }\) for some \(c>0\) and \(\theta \in [0,1)\) such that for any \(\mathbf{x}\in {\mathcal {B}}_\rho (\bar{{\mathbf {x}}})\cap \mathrm {dom}(\partial \psi ) \text { and }\psi (\bar{\mathbf{x}})<\psi (\mathbf{x})< \psi (\bar{\mathbf{x}})+\eta \), it holds
where \(\mathrm {dom}(\partial \psi )=\{\mathbf{x}: \partial \psi (\mathbf{x})\ne \emptyset \}\) and \(\mathrm {dist}(\mathbf {0},\partial \psi (\mathbf{x}))=\min \{\Vert \mathbf{y}\Vert :\mathbf{y}\in \partial \psi (\mathbf{x})\}\).
The KL property was introduced by Łojasiewicz [36] for real analytic functions. Kurdyka [31] extended it to functions of the o-minimal structure. Recently, the KL inequality (4) was further extended to nonsmooth sub-analytic functions [11]. The work [12] characterizes the geometric meaning of the KL inequality.
1.4 Related Literature
There are many methods that solve general nonconvex problems. Methods in the papers [6, 15, 18, 21], the books [9, 45], and in the references therein, do not break variables into blocks. They usually have the properties of local convergence or subsequence convergence to a critical point, or global convergence in terms of the violation of optimality conditions. Next, we review BCD methods, which can significantly outperform their full coordinate update if the problems or the updates satisfy the coordinate-friendly structure [48, 54].
BCD has been extensively used in many applications. Its original form, block coordinate minimization (BCM), which updates a block by minimizing the original objective with respect to that block, dates back to the 1950s [24] and is closely related to the Gauss–Seidel and SOR methods for linear equation systems. Its convergence was studied under a variety of settings (cf. [23, 49, 55] and the references therein). The convergence rate of BCM was established under the strong convexity assumption [39] for the multi-block case and under the general convexity assumption [8] for the two-block case. To have even cheaper updates, one can update a block approximately, for example, by minimizing an approximate objective like was done in (2), instead of sticking to the original objective. The work [56] is a block coordinate gradient descent (BCGD) method where taking a block gradient step is equivalent to minimizing a certain prox-linear approximation of the objective. Its whole sequence convergence and local convergence rate were established under the assumptions of a so-called local Lipschitzian error bound and the convexity of the objective’s nondifferentiable part. The randomized block coordinate descent (RBCD) method in [37, 43] randomly chooses the block to update at each iteration and is not essentially cyclic. Objective convergence was established [43, 51], and the violation of the first-order optimality condition was shown to converge to zero [37]. There is no iterate convergence result for RBCD.
Some special cases of Algorithm 1 have been analyzed in the literature. The work [61] uses cyclic updates of a fixed order and assumes block-wise convexity; [13] studies two blocks without extrapolation, namely, \(s=2\) and \(\hat{{\mathbf {x}}}_{i}^k={\mathbf {x}}_{i}^{k-1},\,\forall k\) in (2). A more general result is [5, Lemma 2.6], where three conditions for whole sequence convergence are given and are met by methods including averaged projection, proximal point, and forward-backward splitting. Algorithm 1, however, does not satisfy the three conditions in [5].
The extrapolation technique in (3) has been applied to accelerate the (block) prox-linear method for solving convex optimization problems (e.g., [7, 38, 44, 51]). Recently, [22, 61] show that the (block) prox-linear iteration with extrapolation can still converge if the nonsmooth part of the problem is convex, while the smooth part can be nonconvex. Because of the convexity assumption, their convergence results do not apply to Algorithm 1 for solving the general nonconvex problem (1). Numerically, [35, 58] demonstrate that extrapolation technique can also accelerate algorithms for nonconvex matrix factorization problems.
1.5 Contributions
We summarize the main contributions of this paper as follows.
-
We propose a block prox-linear (BPL) method for nonconvex smooth and nonsmooth optimization. Extrapolation is used to accelerate it. To our best knowledge, this is the first work of prox-linear acceleration for fully nonconvex problems (where both smooth and nonsmooth terms are nonconvex) with a convergence guarantee. However, we have not proved any improved convergence rate.
-
Assuming essentially cyclic updates of the blocks, we obtain the whole sequence convergence of BPL to a critical point with rate estimates, by first establishing subsequence convergence and then applying the Kurdyka–Łojasiewicz (KL) property. Furthermore, we tailor our convergence analysis to several existing algorithms, including non-convex regularized linear regression and nonnegative matrix factorization, to improve their existing convergence results.
-
We numerically tested BPL on nonnegative matrix and tensor factorization problems. At each cycle of updates, the blocks were randomly shuffled. We observed that BPL was very efficient and that random shuffling avoided local solutions more effectively than the deterministic cyclic order.
1.6 Notation and Preliminaries
We restrict our discussion in \(\mathbb {R}^n\) equipped with the Euclidean norm, denoted by \(\Vert \cdot \Vert \). However, all our results can be extended to general of primal and dual norm pairs. The lower-case letter s is reserved for the number of blocks and \(\ell , L, L_k,\ldots \) for various Lipschitz constants. \({\mathbf {x}}_{<i}\) is short for \(({\mathbf {x}}_1,\ldots ,{\mathbf {x}}_{i-1})\), \({\mathbf {x}}_{>i}\) for \(({\mathbf {x}}_{i+1},\ldots ,{\mathbf {x}}_s)\), and \({\mathbf {x}}_{\ne i}\) for \(({\mathbf {x}}_{<i},{\mathbf {x}}_{>i})\). We simplify \(f({\mathbf {x}}_{<i},\hat{{\mathbf {x}}}_i,{\mathbf {x}}_{>i})\) to \(f({\mathbf {x}}_{\ne i},\hat{{\mathbf {x}}}_i)\). The distance of a point \({\mathbf {x}}\) to a set \({\mathcal {Y}}\) is denoted by \(\text {dist}({\mathbf {x}},{\mathcal {Y}})=\inf _{{\mathbf {y}}\in {\mathcal {Y}}}\Vert {\mathbf {x}}-{\mathbf {y}}\Vert .\)
Since the update may be aperiodic, extra notation is used for when and how many times a block is updated. Let \({\mathcal {K}}[i,k]\) denote the set of iterations in which the ith block has been selected to update till the kth iteration:
and let
which is the number of times the ith block has been updated till iteration k. For \(k=1,\ldots ,\) we have \(\cup _{i=1}^s{\mathcal {K}}[i,k]=[k]\triangleq \{1,2,\ldots ,k\}\) and \(\sum _{i=1}^sd_i^k=k\).
Let \({\mathbf {x}}^k\) be the value of \({\mathbf {x}}\) after the kth iteration, and for each block i, \(\tilde{\mathbf{x}}_i^j\) be the value of \({\mathbf {x}}_i\) after its jth update. By letting \(j=d_i^k\), we have \(\mathbf{x}_i^k = \tilde{\mathbf{x}}_i^j\).
The extrapolated point in (2) (for \(i=b_k\)) is computed from the last two updates of the same block:
for some weight \(0\le \omega _k\le 1\). We partition the set of Lipschitz constants and the extrapolation weights into s disjoint subsets as
Hence, for each block i, we have three sequences:
For simplicity, we take stepsizes and extrapolation weights as follows
However, if the problem (1) has more structures such as block convexity, we can use larger \(\alpha _k\) and \(\omega _k\); see Remark 2. Table 1 summarizes the notation. In addition, we initialize \(\tilde{{\mathbf {x}}}_i^{-1}=\tilde{{\mathbf {x}}}_i^0={\mathbf {x}}_i^0,~\forall i\).
We make the following definitions, which can be found in [52].
Definition 2
(Limiting Fréchet subdifferential [30]) A vector \({\mathbf {g}}\) is a Fréchet subgradient of a lower semicontinuous function F at \({\mathbf {x}}\in {\mathrm {dom}}(F)\) if
The set of Fréchet subgradient of F at \({\mathbf {x}}\) is called Fréchet subdifferential and denoted as \(\hat{\partial } F({\mathbf {x}})\). If \({\mathbf {x}}\not \in {\mathrm {dom}}(F)\), then \(\hat{\partial } F({\mathbf {x}})=\emptyset \).
The limiting Fréchet subdifferential is denoted by \({\partial } F({\mathbf {x}})\) and defined as
If F is differentiableFootnote 2 at \({\mathbf {x}}\), then \(\partial F({\mathbf {x}})=\hat{\partial } F({\mathbf {x}})=\{\nabla F({\mathbf {x}})\}\); see [52, Exercise 8.8] for example, and if F is convex, then \(\partial F({\mathbf {x}})=\{{\mathbf {g}}{:} F({\mathbf {y}})\ge F({\mathbf {x}})+\langle {\mathbf {g}}, {\mathbf {y}}-{\mathbf {x}}\rangle ,\,\forall {\mathbf {y}}\in \text{ dom }(F)\}.\) We use the limiting subdifferential for general nonconvex nonsmooth functions. For problem (1), it holds that (see [4, Lemma 2.1] or [52, Prop. 10.6, pp. 426])
where \({\mathcal {X}}_1\times {\mathcal {X}}_2\) denotes the Cartesian product of \({\mathcal {X}}_1\) and \({\mathcal {X}}_2\) .
Definition 3
(Critical point) A point \({\mathbf {x}}^*\) is called a critical point of F if \(\mathbf {0}\in \partial F({\mathbf {x}}^*)\).
Definition 4
(Proximal mapping) For a proper, lower semicontinuous function r, its proximal mapping \({\mathbf {prox}}_r(\cdot )\) is defined as
As r is nonconvex, \({\mathbf {prox}}_r(\cdot )\) is generally set-valued. Using this notation, the update in (2) can be written as (assume \(i=b_k\))
1.7 Organization
The rest of the paper is organized as follows. Section 2 establishes convergence results. Examples and applications are given in Sect. 3, and finally Sect. 4 concludes this paper.
2 Convergence Analysis
In this section, we analyze the convergence of Algorithm 1. Throughout our analysis, we make the following assumptions.
Assumption 1
F is proper and lower bounded in \({\mathrm {dom}}(F)\triangleq \{{\mathbf {x}}{:} F({\mathbf {x}})<+\infty \}\), f is continuously differentiable, and \(r_i\) is proper lower semicontinuous for all i. Problem (1) has a critical point \({\mathbf{x}}^*\), i.e., \(\mathbf {0}\in \partial F({\mathbf{x}}^*)\).
Assumption 2
Let \(i=b_k\). \(\nabla _{{\mathbf {x}}_{i}} f(\mathbf{x}_{\ne i}^{k-1},\mathbf{x}_{i})\) has Lipschitz continuity constant \(L_k\) with respect to \(\mathbf{x}_{i}\), i.e.,
and there exist constants \(0<\ell \le L<\infty ,\) such that \(\ell \le L_k\le L\) for all k.
Assumption 3
(Essentially cyclic block update) In Algorithm 1, within any T consecutive iterations, every block is updated at least one time.
Our analysis proceeds with several steps. We first estimate the objective decrease after every iteration (see Lemma 1) and then establish a square summable result of the iterate differences (see Proposition 1). Through the square summable result, we show a subsequence convergence result that every limit point of the iterates is a critical point (see Theorem 1). Assuming the KL property (see Definition 1) on the objective function and a monotonicity condition (see Condition 1), we establish whole sequence convergence of our algorithm and also give estimate of convergence rate (see Theorems 2 and 3).
We will show that a range of nontrivial \(\omega _k>0\) always exists to satisfy Condition 1 under a mild assumption, and thus one can backtrack \(\omega _k\) to ensure \(F({\mathbf {x}}^k)\le F({\mathbf {x}}^{k-1}),\,\forall k\). Also, from the result below in (12), one can simply set \(\omega _k=0\) and redo the kth update if \(F({\mathbf {x}}^k)> F({\mathbf {x}}^{k-1})\) is detected. Maintaining the monotonicity of \(F({\mathbf {x}}^k)\) can significantly improve the numerical performance of the algorithm, as shown in our numerical results below and also in [46, 60]. Note that subsequence convergence does not require this condition.
We begin our analysis with the following lemma. The proofs of all the lemmas and propositions are given in “Appendix 1”.
Lemma 1
Take \(\alpha _k\) and \(\omega _k\) as in (9). After each iteration k, it holds
where \(c_1=\frac{1}{4}, c_2=9\), \(i=b_k\) and \(j=d_i^k\).
Remark 1
We can relax the choices of \(\alpha _k\) and \(\omega _k\) in (9). For example, we can take \(\alpha _k=\frac{1}{\gamma L_k},\,\forall k\), and \(\tilde{\omega }_i^j\le \frac{\delta (\gamma -1)}{2(\gamma +1)}\sqrt{\tilde{L}_i^{j-1}/\tilde{L}_i^{j}},\,\forall i,j\) for any \(\gamma >1\) and some \(\delta <1\). Then, (12) and (13) hold with \(c_1=\frac{\gamma -1}{4}, c_2=\frac{(\gamma +1)^2}{\gamma -1}\). In addition, if \(0<\inf _k\alpha _k\le \sup _k\alpha _k<\infty \) (not necessary \(\alpha _k=\frac{1}{\gamma L_k}\)), (12) holds with positive \(c_1\) and \(c_2\), and the extrapolation weights satisfy \(\tilde{\omega }_i^j\le \delta \sqrt{(c_1\tilde{L}_i^{j-1})/(c_2\tilde{L}_i^j)},\forall i,j\) for some \(\delta <1\), then all our convergence results below remain valid.
Note that \(d_i^{k}=d_i^{k-1}+1\) for \(i=b_k\) and \(d_i^{k}=d_i^{k-1}, \forall i\ne b_k\). Adopting the convention that \(\sum _{j=p}^q a_j=0\) when \(q<p\), we can write (13) into
which will be used in our subsequent convergence analysis.
Remark 2
If f is block multi-convex, i.e., it is convex with respect to each block of variables while keeping the remaining variables fixed, and \(r_i\) is convex for all i, then taking \(\alpha _k=\frac{1}{L_k}\), we have (12) holds with \(c_1=\frac{1}{2}\) and \(c_2=\frac{1}{2}\); see the proof in “Appendix 1”. In this case, we can take \(\tilde{\omega }_i^j\le \delta \sqrt{\tilde{L}_i^{j-1}/\tilde{L}_i^j},\,\forall i,j\) for some \(\delta <1\), and all our convergence results can be shown through the same arguments.
2.1 Subsequence Convergence
Using Lemma 1, we can have the following result, through which we show subsequence convergence of Algorithm 1.
Proposition 1
(Square summable) Let \(\{\mathbf{x}^k\}_{k\ge 1}\) be generated from Algorithm 1 with \(\alpha _k\) and \(\omega _k\) taken from (9). We have
Theorem 1
(Subsequence convergence) Under Assumptions 1 through 3, let \(\{\mathbf{x}^k\}_{k\ge 1}\) be generated from Algorithm 1 with \(\alpha _k\) and \(\omega _k\) taken from (9). Then any limit point \(\bar{{\mathbf {x}}}\) of \(\{\mathbf{x}^k\}_{k\ge 1}\) is a critical point of (1). If the subsequence \(\{{\mathbf {x}}^k\}_{k\in \bar{{\mathcal {K}}}}\) converges to \(\bar{{\mathbf {x}}}\), then
Remark 3
The existence of finite limit point is guaranteed if \(\{{\mathbf {x}}^k\}_{k\ge 1}\) is bounded, and for some applications, the boundedness of \(\{{\mathbf {x}}^k\}_{k\ge 1}\) can be satisfied by setting appropriate parameters in Algorithm 1; see examples in Sect. 3. If \(r_i\)’s are continuous, (16) immediately holds. Since we only assume lower semi-continuity of \(r_i\)’s, \(F({\mathbf {x}})\) may not converge to \(F(\bar{{\mathbf {x}}})\) as \({\mathbf {x}}\rightarrow \bar{{\mathbf {x}}}\), so (16) is not obvious.
Proof
Assume \(\bar{\mathbf{x}}\) is a limit point of \(\{\mathbf{x}^k\}_{k\ge 1}\). Then there exists an index set \({\mathcal {K}}\) so that the subsequence \(\{\mathbf{x}^k\}_{k\in {\mathcal {K}}}\) converging to \(\bar{\mathbf{x}}\). From (15), we have \(\Vert {\mathbf {x}}^{k-1}-{\mathbf {x}}^k\Vert \rightarrow 0\) and thus \(\{\mathbf{x}^{k+\kappa }\}_{k\in {\mathcal {K}}}\rightarrow \bar{\mathbf{x}}\) for any \(\kappa \ge 0\). Define
Take an arbitrary \(i\in \{1,\ldots ,s\}\). Note \({\mathcal {K}}_i\) is an infinite set according to Assumption 3. Taking another subsequence if necessary, \(L_k\) converges to some \(\bar{L}_i\) as \({\mathcal {K}}_i\ni k\rightarrow \infty \). Note that since \(\alpha _k=\frac{1}{2L_k},\forall k\), for any \(k\in {\mathcal {K}}_i\),
Note from (15) and (6) that \(\hat{{\mathbf {x}}}_i^k\rightarrow \bar{{\mathbf {x}}}_i\) as \({\mathcal {K}}_i\ni k\rightarrow \infty \). Since f is continuously differentiable and \(r_i\) is lower semicontinuous, letting \({\mathcal {K}}_i\ni k\rightarrow \infty \) in (17) yields
Hence,
and \(\bar{\mathbf{x}}_i\) satisfies the first-order optimality condition:
Since (18) holds for arbitrary \(i\in \{1,\ldots ,s\}\), \(\bar{\mathbf{x}}\) is a critical point of (1).
In addition, (17) implies
Taking limit superior on both sides of the above inequality over \(k\in {\mathcal {K}}_i\) gives \(\underset{{\mathcal {K}}_i\ni k\rightarrow \infty }{\limsup }r_i(\mathbf{x}_i^k)\le r_i(\bar{\mathbf{x}}_i).\) Since \(r_i\) is lower semi-continuous, \(\underset{{\mathcal {K}}_i\ni k\rightarrow \infty }{\liminf }r_i(\mathbf{x}_i^k)\ge r_i(\bar{\mathbf{x}}_i)\), and thus
Noting that f is continuous, we complete the proof.\(\square \)
2.2 Whole Sequence Convergence and Rate
In this subsection, we establish the whole sequence convergence and rate of Algorithm 1 by assuming the following monotonicity condition.
Condition 1
(Nonincreasing objective) The weight \(\omega _k\) is chosen so that \(F({\mathbf {x}}^k)\le F({\mathbf {x}}^{k-1}),\,\forall k\).
Remark 4
From (12), if \(\omega _k= 0,\forall k\), namely, no extrapolation, then Condition 1 holds. However, extrapolation technique can often accelerate the algorithm. Although without the monotonicity, Theorem 1 can still guarantee convergence of the algorithm, numerically we notice that maintaining monotonicity of the objective can further improve the performance of the algorithm. To employ extrapolation and also maintain monotonicity, one can first do the update with a positive \(\omega _k\) and check the objective, and if \(F({\mathbf {x}}^k)> F({\mathbf {x}}^{k-1})\), then redo the kth update by using \(\omega _k=0\). For the problems that satisfy the assumptions of the next proposition, one can find \(\omega _k>0\) through backtracking to maintain the monotonicity of \(F({\mathbf {x}}^k)\). In general, how to choose \(\omega _k\) depends on specific applications. We will test two different settings of \(\omega _k\) in the numerical experiments.
The following proposition shows that under mild assumptions, Condition 1 holds for certain \(\omega _k>0\).
Proposition 2
Let \(i=b_k\). Assume \({\mathbf {prox}}_{\alpha _k r_i}\) is single-valued near \({\mathbf {x}}_i^{k-1}-\alpha _k\nabla _{{\mathbf {x}}_i}f({\mathbf {x}}^{k-1})\) and
namely, progress can still be made by updating the ith block. Then, there is \(\bar{\omega }_k>0\) such that for any \(\omega _k\in [0, \bar{\omega }_k]\), we have \(F({\mathbf {x}}^k)\le F({\mathbf {x}}^{k-1})\).
The proof of Proposition 2 involves the continuity of \({\mathbf {prox}}_{\alpha _kr_i}\) and is deferred to “Proof of Proposition 2” in Appendix 1.
Under Condition 1 and the KL property of F (Definition 1), we show that the sequence \(\{\mathbf{x}^k\}\) converges as long as it has a finite limit point. We first establish a lemma, which has its own importance and together with the KL property implies Lemma 2.6 of [5].
The result in Lemma 2 below is very general because we need to apply it to Algorithm 1 in its general form. To ease understanding, let us go over its special cases. If \(s=1\), \(n_{1,m}=m\) and \(\beta =0\), then (21) below with \(\alpha _{1,m}=\alpha _m\) and \(A_{1,m}=A_m\) reduces to \(\alpha _{m+1}A_{m+1}^2\le B_m A_m\), which together with Young’s inequality gives \(\sqrt{\underline{\alpha }} A_{m+1}\le \frac{\sqrt{\underline{\alpha }}}{2}A_m+\frac{1}{2\sqrt{\underline{\alpha }}}B_m\). Hence, if \(\{B_m\}_{m\ge 1}\) is summable, so will be \(\{A_m\}_{m\ge 1}\). This result can be used to analyze the prox-linear method. The more general case of \(s>1\), \(n_{i,m}=m,\,\forall i\) and \(\beta =0\) applies to the cyclic block prox-linear method. In this case, (21) reduces to \(\sum _{i=1}^s\alpha _{i,m+1}A_{i,m+1}^2\le B_m\sum _{i=1}^sA_{i,m},\) which together with the Young’s inequality implies
where \(\tau \) is sufficiently large so that \(\frac{1}{\tau }<\sqrt{\underline{\alpha }}\). Less obviously but still, if \(\{B_m\}_{m\ge 1}\) is summable, so will be \(\{A_{i,m}\}_{m\ge 1},\,\forall i\). Finally, we will need \(\beta >0\) in (21) to analyze the accelerated block prox-linear method.
Lemma 2
For nonnegative sequences \(\{A_{i,j}\}_{j\ge 0},\{\alpha _{i,j}\}_{j\ge 0},\, i=1,\ldots ,s\), and \(\{B_m\}_{m\ge 0}\), if
and
where \(0\le \beta <1\), and \(\{n_{i,m}\}_{m\ge 0},\forall i\) are nonnegative integer sequences satisfying: \(n_{i,m}\le n_{i,m+1}\le n_{i,m}+ N, \forall i, m\), for some integer \(N>0\). Then we have that for \(0\le M_1<M_2\le M\),
In addition, if \(\sum _{m=1}^\infty B_m<\infty \), \(\lim _{m\rightarrow \infty }n_{i,m}=\infty ,\forall i\), and (21) holds for all m, then we have
The proof of this lemma is given in “Proof of Lemma 2” in Appendix 1.
Remark 5
To apply (21) to the convergence analysis of Algorithm 1, we will use \(A_{i,j}\) for \(\Vert \tilde{{\mathbf {x}}}_i^{j-1}-\tilde{{\mathbf {x}}}_i^j\Vert \) and relate \(\alpha _{i,j}\) to Lipschitz constant \(\tilde{L}_i^j\). The second term in the bracket of the left hand side of (21) is used to handle the extrapolation used in Algorithm 1, and we require \(\beta <1\) such that the first term can dominate the second one after summation.
We also need the following result.
Proposition 3
Let \(\{\mathbf{x}^k\}\) be generated from Algorithm 1. For a specific iteration \(k\ge 3T\), assume \({\mathbf {x}}^\kappa \in {\mathcal {B}}_\rho (\bar{{\mathbf {x}}}),\,\kappa =k-3T,k-3T+1,\ldots ,k\) for some \(\bar{{\mathbf {x}}}\) and \(\rho >0\). If for each i, \(\nabla _{{\mathbf {x}}_i}f({\mathbf {x}})\) is Lipschitz continuous with constant \(L_G\) within \(B_{4\rho }(\bar{{\mathbf {x}}})\) with respect to \({\mathbf {x}}\), i.e.,
then
We are now ready to present and show the whole sequence convergence of Algorithm 1.
Theorem 2
(Whole sequence convergence) Suppose that Assumptions 1 through 3 and Condition 1 hold. Let \(\{\mathbf{x}^k\}_{k\ge 1}\) be generated from Algorithm 1. Assume
-
1.
\(\{\mathbf{x}^k\}_{k\ge 1}\) has a finite limit point \(\bar{\mathbf{x}}\);
-
2.
F satisfies the KL property (4) around \(\bar{\mathbf{x}}\) with parameters \(\rho \), \(\eta \) and \(\theta \).
-
3.
For each i, \(\nabla _{{\mathbf {x}}_i} f(\mathbf{x})\) is Lipschitz continuous within \(B_{4\rho }(\bar{{\mathbf {x}}})\) with respect to \(\mathbf{x}\).
Then
Remark 6
Before proving the theorem, let us remark on the conditions 1–3. The condition 1 can be guaranteed if \(\{{\mathbf {x}}^k\}_{k\ge 1}\) has a bounded subsequence. The condition 2 is satisfied for a broad class of applications as we mentioned in Sect. 1.3. The condition 3 is a weak assumption since it requires the Lipschitz continuity only in a bounded set.
Proof
From (16) and Condition 1, we have \(F({\mathbf {x}}^k)\rightarrow F(\bar{{\mathbf {x}}})\) as \(k\rightarrow \infty \). We consider two cases depending on whether there is an integer \(K_0\) such that \(F({\mathbf {x}}^{K_0})=F(\bar{{\mathbf {x}}})\).
Case 1 Assume \(F({\mathbf {x}}^k)>F(\bar{{\mathbf {x}}}),\,\forall k\).
Since \(\bar{\mathbf{x}}\) is a limit point of \(\{{\mathbf {x}}^k\}\) and according to (15), one can choose a sufficiently large \(k_0\) such that the points \(\mathbf{x}^{k_0+\kappa }, \kappa =0,1,\ldots ,3T\) are all sufficiently close to \(\bar{\mathbf{x}}\) and in \({\mathcal {B}}_\rho (\bar{\mathbf{x}})\), and also the differences \(\Vert \mathbf{x}^{k_0+\kappa }-\mathbf{x}^{k_0+\kappa +1}\Vert , \kappa = 0,1,\ldots ,3T\) are sufficiently close to zero. In addition, note that \(F({\mathbf {x}}^k)\rightarrow F(\bar{{\mathbf {x}}})\) as \(k\rightarrow \infty \), and thus both \(F({\mathbf {x}}^{3(k_0+1)T})-F(\bar{{\mathbf {x}}})\) and \(\phi (F({\mathbf {x}}^{3(k_0+1)T})-F(\bar{{\mathbf {x}}}))\) can be sufficiently small. Since \(\{{\mathbf {x}}^k\}_{k\ge 0}\) converges if and only if \(\{{\mathbf {x}}^k\}_{k\ge k_0}\) converges, without loss of generality, we assume \(k_0=0\), which is equivalent to setting \({\mathbf {x}}^{k_0}\) as a new starting point, and thus we assume
where
Assume that \({\mathbf {x}}^{3mT}\in {\mathcal {B}}_\rho (\bar{\mathbf{x}})\) and \(F({\mathbf {x}}^{3mT})<F(\bar{{\mathbf {x}}})+\eta ,\, m = 0,\ldots , M\) for some \(M\ge 1\). Note that from (25), we can take \(M=1\). Letting \(k=3mT\) in (24) and using KL inequality (4), we have
where \(L_G\) is a uniform Lipschitz constant of \(\nabla _{{\mathbf {x}}_i}f({\mathbf {x}}),\forall i\) within \({\mathcal {B}}_{4\rho }(\bar{{\mathbf {x}}})\). In addition, it follows from (14) that
Let \(\phi _m=\phi (F(\mathbf{x}^{3mT})-F(\bar{\mathbf{x}}))\). Note that
Combining (27) and (28) with the above inequality and letting \(\tilde{C}=2(L_G+2L)+sL_G\) give
Letting \(A_{i,j}=\Vert \tilde{{\mathbf {x}}}_i^{j-1}-\tilde{{\mathbf {x}}}_i^j\Vert , \alpha _{i,j}=\tilde{L}_i^j/4\), \(n_{i,m}=d_i^{3mT}\), \(B_m=\tilde{C}(\phi _m-\phi _{m+1})\), and \(\beta =\delta \) in Lemma 2, we note \(d_i^{3(m+1)T}-d_i^{3mT}\le 3T\) and have from (22) that for any intergers N and M,
where C is given in (26). Letting \(N=1\) in the above inequality, we have
Hence, \(\mathbf{x}^{3(M+1)T}\in {\mathcal {B}}_\rho (\bar{\mathbf{x}})\). In addition \(F(\mathbf{x}^{3(M+1)T})\le F({\mathbf {x}}^{3MT})<F(\bar{{\mathbf {x}}})+\eta \). By induction, \(\mathbf{x}^{3mT}\in {\mathcal {B}}_\rho (\bar{\mathbf{x}}),\forall m\), and (30) holds for all M. Using Lemma 2 again, we have that \(\{\tilde{\mathbf{x}}_i^j\}\) is a Cauchy sequence for all i and thus converges, and \(\{{\mathbf {x}}^k\}\) also converges. Since \(\bar{\mathbf{x}}\) is a limit point of \(\{\mathbf{x}^k\}\), we have \(\mathbf{x}^k\rightarrow \bar{\mathbf{x}}\), as \(k\rightarrow \infty \).
Case 2 Assume \(F({\mathbf {x}}^{K_0})=F(\bar{{\mathbf {x}}})\) for a certain integer \(K_0\).
Since \(F({\mathbf {x}}^k)\) is nonincreasingly convergent to \(F(\bar{{\mathbf {x}}})\), we have \(F({\mathbf {x}}^k)=F(\bar{{\mathbf {x}}}),\,\forall k\ge K_0\). Take \(M_0\) such that \(3M_0T\ge K_0\). Then \(F({\mathbf {x}}^{3mT}) = F({\mathbf {x}}^{3(m+1)T})\) \(=F(\bar{{\mathbf {x}}}),\,\forall m\ge M_0\). Summing up (28) from \(m=M\ge M_0\) gives
Let
Noting \(\ell \le \tilde{L}_i^j\le L\), we have from (31) that \(\ell (1-\delta ^2)S_{M+1}\le L\delta ^2(S_M-S_{M+1})\) and thus
where \(\gamma =\frac{L\delta ^2}{L\delta ^2+\ell (1-\delta ^2)}<1\). By the Cauchy–Schwarz inequality and noting that \(a_m\) is the summation of at most 3T nonzero terms, we have
Since \(\gamma <1\), (32) implies
and thus \({\mathbf {x}}^k\) converges to the limit point \(\bar{{\mathbf {x}}}\). This completes the proof.\(\square \)
In addition, we can show convergence rate of Algorithm 1 through the following lemma.
Lemma 3
For nonnegative sequence \(\{A_k\}_{k=1}^\infty \), if \(A_k\le A_{k-1}\le 1,\, \forall k\ge K\) for some integer K, and there are positive constants \(\alpha ,\beta \) and \(\gamma \) such that
we have
-
1.
If \(\gamma \ge 1\), then \(A_k\le \big (\frac{\alpha +\beta }{1+\alpha +\beta }\big )^{k-K}A_K,\,\forall k\ge K\);
-
2.
If \(0<\gamma <1\), then \(A_k\le \nu (k-K)^{-\frac{\gamma }{1-\gamma }},\,\forall k\ge K,\) for some positive constant \(\nu \).
Theorem 3
(Convergence rate) Under the assumptions of Theorem 2, we have:
-
1.
If \(\theta \in [0,\frac{1}{2}]\), \(\Vert \mathbf{x}^k-\bar{\mathbf{x}}\Vert \le C\alpha ^k, \forall k\), for a certain \(C>0, ~\alpha \in [0,1)\);
-
2.
If \(\theta \in (\frac{1}{2},1)\), \(\Vert \mathbf{x}^k-\bar{\mathbf{x}}\Vert \le Ck^{-(1-\theta )/(2\theta -1)}, \forall k\), for a certain \(C>0\).
Remark 7
Before proving the theorem, let us make a few remarks on the parameter \(\theta \). First, we see that smaller \(\theta \) implies faster convergence speed, and also note that the condition in (4) is stronger if \(\theta \) is smaller. Secondly, it is generally not easy to determine the value of \(\theta \). For several classes of functions, [61] gives its range of possible values. The very recent work [34] presents methods to estimate its value for a function formed from other functions, for which the values of \(\theta \) are known.
Proof
When \(\theta =0\), then \(\phi '(a) = c,\forall a\), and there must be a sufficiently large integer \(k_0\) such that \(F({\mathbf {x}}^{k_0})=F(\bar{{\mathbf {x}}})\), and thus \(F({\mathbf {x}}^k)=F(\bar{{\mathbf {x}}}), \forall k\ge k_0\), by noting \(F({\mathbf {x}}^{k-1})\ge F({\mathbf {x}}^k)\) and \(\lim _{k\rightarrow \infty }F({\mathbf {x}}^k)=F(\bar{{\mathbf {x}}})\). Otherwise \(F({\mathbf {x}}^k)>F(\bar{{\mathbf {x}}}),\forall k\). Then from the KL inequality (4), it holds that \(c\cdot \mathrm {dist}(\mathbf {0},\partial F({\mathbf {x}}^k))\ge 1,\) for all \({\mathbf {x}}^k\in {\mathcal {B}}_\rho (\bar{{\mathbf {x}}})\), which is impossible since \(\mathrm {dist}(\mathbf {0},\partial F({\mathbf {x}}^{3mT}))\rightarrow 0\) as \(m\rightarrow \infty \) from (24).
For \(k>k_0\), since \(F({\mathbf {x}}^{k-1})=F({\mathbf {x}}^k)\), and noting that in (14) all terms but one are zero under the summation over i, we have
Summing the above inequality over k from \(m>k_0\) to \(\infty \) and using \(\ell \le \tilde{L}_i^j\le L,\forall i,j\), we have
Let
Then from Assumption 3, we have
which together with (34) gives \(B_m\le \frac{\sqrt{L}\delta }{\sqrt{\ell }(1-\delta )}(B_{m-T}-B_m).\) Hence,
where \(\ell _0=\min \{\ell : \ell T\ge k_0\}\). Letting \(\alpha =\big (\frac{\sqrt{L}\delta }{\sqrt{L}\delta +\sqrt{\ell }(1-\delta )}\big )^{1/T}\), we have
Note \(\Vert {\mathbf {x}}^{m-1}-\bar{{\mathbf {x}}}\Vert \le B_m\). Hence, choosing a sufficiently large \(C>0\) gives the result in item 1 for \(\theta =0\).
When \(0<\theta <1\), if for some \(k_0\), \(F({\mathbf {x}}^{k_0})=F(\bar{{\mathbf {x}}})\), we have (35) by the same arguments as above and thus obtain linear convergence. Below we assume \(F({\mathbf {x}}^k)>F(\bar{{\mathbf {x}}}),\,\forall k\). Let
and thus
From (27), it holds that
which implies
In addition, letting \(N=m\) in (30), we have
where C is the same as that in (30). Letting \(M\rightarrow \infty \) in the above inequality, we have
where the second inequality is from (36). Since \(A_{m-1}-A_m\le 1\) as m is sufficiently large and \(\Vert {\mathbf {x}}^m-\bar{{\mathbf {x}}}\Vert \le A_{\lfloor \frac{m}{3T}\rfloor }\), the results in item 2 for \(\theta \in (0,\frac{1}{2}]\) and item 3 now immediately follow from Lemma 3.\(\square \)
Before closing this section, let us make some comparison to the recent work [61]. The whole sequence convergence and rate results in this paper are the same as those in [61]. However, the results here cover more applications. We do not impose any convexity assumption on (1) while [61] requires f to be block-wise convex and every \(r_i\) to be convex. In addition, the results in [61] only apply to cyclic block prox-linear method. Empirically, a different block-update order can give better performance. As demonstrated in [16], random shuffling can often improve the efficiency of the coordinate descent method for linear support vector machine, and [59] shows that for the Tucker tensor decomposition [see (47)], updating the core tensor more frequently can be better than cyclicly updating the core tensor and factor matrices.
3 Applications and Numerical Results
In this section, we give some specific examples of (1) and show the whole sequence convergence of some existing algorithms. In addition, we demonstrate that maintaining the nonincreasing monotonicity of the objective value can improve the convergence of accelerated gradient method and that updating variables in a random order can improve the performance of Algorithm 1 over that in the cyclic order.
3.1 FISTA with Backtracking Extrapolation
FISTA [7] is an accelerated proximal gradient method for solving composite convex problems. It is a special caseFootnote 3 of Algorithm 1 with \(s=1\) and specific \(\omega _k\)’s. For the readers’ convenience, we present the method in Algorithm 2, where both f and g are convex functions, and \(L_f\) is the Lipschitz constant of \(\nabla f({\mathbf {x}})\). The algorithm reaches the optimal order of convergence rate among first-order methods, but in general, it does not guarantee monotonicity of the objective values. A restarting scheme is studied in [46] that restarts FISTA from \({\mathbf {x}}^k\) whenever \(F({\mathbf {x}}^{k+1})>F({\mathbf {x}}^k)\) occurs.Footnote 4 It is demonstrated that the restarting FISTA can significantly outperform the original one. In this subsection, we show that FISTA with backtracking extrapolation weight can do even better than the restarting one.

We test the algorithms on solving the following problem
where \({\mathbf {A}}\in \mathbb {R}^{m\times n}\) and \({\mathbf {b}}\in \mathbb {R}^m\) are given. In the test, we set \(m=1000\), \(n=3000\) and \(\lambda =1\) and generate two data sets. The first one is generated in the same way as that in [46]: first generate \({\mathbf {A}}\) with all its entries independently following standard normal distribution \({\mathcal {N}}(0,1)\), then a sparse vector \({\mathbf {x}}\) with only 50 nonzero entries independently following \({\mathcal {N}}(0,1)\), and finally let \({\mathbf {b}}={\mathbf {A}}{\mathbf {x}}+{\mathbf {y}}\) with the entries in \({\mathbf {y}}\) sampled from \({\mathcal {N}}(0,0.1)\). This way ensures the optimal solution is approximately sparse. In the second data set, we have an ill-conditioned sensing matrix \({\mathbf {A}}={\mathbf {U}}\varvec{\Sigma }{\mathbf {V}}^\top \), where \({\mathbf {U}}\in \mathbb {R}^{m\times m}\) and \({\mathbf {V}}\in \mathbb {R}^{n\times m}\) are matrices with orthonormal columns, and \(\varvec{\Sigma }\) is a diagonal matrix with the i-th diagonal element \(\sigma _i=10^{-4}+\frac{i-1}{10}\) for \(i=1,\ldots ,m\). Hence, the condition number of \({\mathbf {A}}\) is about \(10^6\). The measurement vector \({\mathbf {b}}\) is generated in the same way as in the first data set. We set \(L_f\) to the spectral norm of \({\mathbf {A}}^*{\mathbf {A}}\) and the initial point to zero vector for all three methods. For the proposed method, at each iteration, we start the extrapolation weight at that given by FISTA and do backtracking by halving it whenever the objective is detected to increase. In addition, if the backtracked weight is smaller than \(10^{-2}\), we simply set it to zero. Figure 1 plots their convergence behavior in terms of iteration number and also running time, where the optimal objective value is given by running the proposed method to 10,000 iterations. For both Gaussian random (well-conditioned) and ill-conditioned \({\mathbf {A}}\), the proposed method performs significantly better than the original FISTA. In addition, it is better than the restarting FISTA for the well-conditioned case.

3.2 Coordinate Descent Method for Nonconvex Regression
As the number of predictors is larger than sample size, variable selection becomes important to keep more important predictors and obtain a more interpretable model, and penalized regression methods are popularly used to achieve variable selection. The work [14] considers the linear regression with nonconvex penalties: the minimax concave penalty (MCP) [63] and the smoothly clipped absolute deviation (SCAD) penalty [20]. Specifically, the following model is considered
where \({\mathbf {y}}\in \mathbb {R}^n\) and \({\mathbf {X}}\in \mathbb {R}^{n\times p}\) are standardized such that
and MCP is defined as
and SCAD penalty is defined as
The cyclic coordinate descent method used in [14] performs the update from \(j=1\) through p
which can be equivalently written into the form of (2) by
Note that the data has been standardized such that \(\Vert {\mathbf {x}}_j\Vert ^2=n\). Hence, if \(\gamma >1\) in (40) and \(\gamma >2\) in (41), it is easy to verify that the objective in (42) is strongly convex, and there is a unique minimizer. From the convergence results of [55], it is concluded in [14] that any limit pointFootnote 5 of the sequence \(\{\varvec{\beta }^k\}\) generated by (42) is a coordinate-wise minimizer of (38). Since \(r_{\lambda ,\gamma }\) in both (40) and (41) is piecewise polynomial and thus semialgebraic, it satisfies the KL property (see Definition 1). In addition, let \(f(\varvec{\beta })\) be the objective of (38). Then
where \(\mu \) is the strong convexity constant of the objective in (42). Hence, according to Theorem 2 and Remark 1, we have the following convergence result.
Theorem 4
Assume \({\mathbf {X}}\) is standardized as in (39). Let \(\{\varvec{\beta }^k\}\) be the sequence generated from (42) or by the following update with random shuffling of coordinates
where \((\pi ^k_1,\ldots ,\pi ^k_p)\) is any permutation of \((1,\ldots ,p)\), and \(r_{\lambda ,\gamma }\) is given by either (40) with \(\gamma >1\) or (41) with \(\gamma >2\). If \(\{\varvec{\beta }^k\}\) has a finite limit point, then \(\varvec{\beta }^k\) converges to a coordinate-wise minimizer of (38).
3.3 Rank-One Residue Iteration for Nonnegative Matrix Factorization
The nonnegative matrix factorization can be modeled as
where \({\mathbf {M}}\in \mathbb {R}_+^{m\times n}\) is a given nonnegative matrix, \(\mathbb {R}_+^{m\times p}\) denotes the set of \(m\times p\) nonnegative matrices, and p is a user-specified rank. The problem in (43) can be written in the form of (1) by letting
In the literature, most existing algorithms for solving (43) update \({\mathbf {X}}\) and \({\mathbf {Y}}\) alternatingly; see the review paper [28] and the references therein. The work [25] partitions the variables in a different way: \(({\mathbf {x}}_1,{\mathbf {y}}_1,\ldots ,{\mathbf {x}}_p,{\mathbf {y}}_p)\), where \({\mathbf {x}}_j\) denotes the jth column of \({\mathbf {X}}\), and proposes the rank-one residue iteration (RRI) method. It updates the variables cyclically, one column at a time. Specifically, RRI performs the updates cyclically from \(i=1\) through p,
where \({\mathbf {X}}_{>i}^k=({\mathbf {x}}_{i+1}^k,\ldots ,{\mathbf {x}}_p^k)\). It is a cyclic block minimization method, a special case of [55]. The advantage of RRI is that each update in (44) has a closed form solution. Both updates in (44) can be written in the form of (2) by noting that they are equivalent to
Since \(f({\mathbf {X}},{\mathbf {Y}})+r_1({\mathbf {X}})+r_2({\mathbf {Y}})\) is semialgebraic and has the KL property, directly from Theorem 2, we have the following whole sequence convergence, which is stronger compared to the subsequence convergence in [25].
Theorem 5
(Global convergence of RRI) Let \(\{({\mathbf {X}}^k,{\mathbf {Y}}^k)\}_{k=1}^\infty \) be the sequence generated by (44) or (45) from any starting point \(({\mathbf {X}}^0,{\mathbf {Y}}^0)\). If \(\{{\mathbf {x}}_i^k\}_{i,k}\) and \(\{{\mathbf {y}}_i^k\}_{i,k}\) are uniformly bounded and away from zero, then \(({\mathbf {X}}^k,{\mathbf {Y}}^k)\) converges to a critical point of (43).
However, during the iterations of RRI, it may happen that some columns of \({\mathbf {X}}\) and \({\mathbf {Y}}\) become or approach to zero vector, or some of them blow up, and these cases fail the assumption of Theorem 5. To tackle with the difficulties, we modify the updates in (44) and improve the RRI method as follows.
Our first modification is to require each column of \({\mathbf {X}}\) to have unit Euclidean norm; the second modification is to take the Lipschitz constant of \(\nabla _{{\mathbf {x}}_i}f({\mathbf {X}}_{<i}^{k+1},{\mathbf {x}}_i,{\mathbf {X}}_{>i}^k,{\mathbf {Y}}_{<i}^{k+1},{\mathbf {Y}}_{\ge i}^k)\) to be \(L_i^k=\max (L_{\min }, \Vert {\mathbf {y}}_i^k\Vert ^2)\) for some \(L_{\min }>0\); the third modification is that at the beginning of the kth cycle, we shuffle the blocks to a permutation \((\pi _1^k,\ldots ,\pi _p^k)\). Specifically, we perform the following updates from \(i=1\) through p,
Note that if \(\pi _i^k=i\) and \(L_i^k=\Vert {\mathbf {y}}_i^k\Vert ^2\), the objective in (46a) is the same as that in (45a). Both updates in (46) have closed form solutions; see “Appendix 2”. Using Theorem 2, we have the following theorem, whose proof is given in “Proof of Theorem 6” in Appendix 3. Compared to the original RRI method, the modified one automatically has bounded sequence and always has the whole sequence convergence.
Theorem 6
(Whole iterate sequence convergence of modified RRI) Let \(\{({\mathbf {X}}^k,{\mathbf {Y}}^k)\}_{k=1}^\infty \) be the sequence generated by (46) from any starting point \(({\mathbf {X}}^0,{\mathbf {Y}}^0)\). Then \(\{{\mathbf {Y}}^k\}\) is bounded, and \(({\mathbf {X}}^k,{\mathbf {Y}}^k)\) converges to a critical point of (43).

Some images in the Swimmer dataset
3.3.1 Numerical Tests
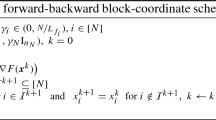
We tested (45) and (46) on randomly generated data and also the Swimmer dataset [19]. We set \(L_{\min }=0.001\) in the tests and found that (46) with \(\pi _i^k=i,\forall i, k\) produced the same final objective values as those by (45) on both random data and the Swimmer dataset. In addition, (46) with random shuffling performed almost the same as those with \(\pi _i^k=i,\forall i\) (i.e., fixed cyclic order) on randomly generated data. However, random shuffling significantly improved the performance of (46) on the Swimmer dataset. There are 256 images of resolution \(32\times 32\) in the Swimmer dataset, and each image (vectorized to one column of \({\mathbf {M}}\)) is composed of four limbs and the body. Each limb has four different positions, and all images have the body at the same position; see Fig. 2. Hence, each of these images is a nonnegative combination of 17 images: one with the body and each one of another 16 images with one limb. We set \(p=17\) in our test and ran (45) and (46) with/without random shuffling to 100 cycles. If the relative error \({\Vert {\mathbf {X}}^{out}({\mathbf {Y}}^{out})^\top -{\mathbf {M}}\Vert _F}/{\Vert {\mathbf {M}}\Vert _F}\) is below \(10^{-3}\), we regard the factorization to be successful, where \(({\mathbf {X}}^{out},{\mathbf {Y}}^{out})\) is the output. We ran the three different updates for 50 times independently, and for each run, they were fed with the same randomly generated starting point. Both (45) and (46) without random shuffling succeed 20 times, and (46) with random shuffling succeeds 41 times. Figure 3 plots all cases that occur. Every plot is in terms of running time (sec), and during that time, both methods run to 100 cycles. Since (45) and (46) without random shuffling give exactly the same results, we only show the results by (46). From the figure, we see that (46) with fixed cyclic order and with random shuffling has similar computational complexity while the latter one can more frequently avoid bad local solutions.

All four cases of convergence behavior of the modified rank-one residue iteration (46) with fixed cyclic order and with random shuffling. Both run to 100 cycles. The first plot implies random version succeeds while the cyclic version fails and occurs 25 times among 50; the second plot implies both two versions succeed and occurs 16 times among 50; the third plot implies cyclic version succeeds while the random version fails and occurs 4 times among 50; the fourth plot implies both two versions fail and occurs 5 times among 50
3.4 Block Prox-Linear Method for Nonnegative Tucker Decomposition
The nonnegative Tucker decomposition is to decompose a given nonnegative tensor (multi-dimensional array) into the product of a core nonnegative tensor and a few nonnegative factor matrices. It can be modeled as
where \({\mathbf {A}}=({\mathbf {A}}_1,\ldots ,{\mathbf {A}}_N)\) and \(\varvec{{\mathcal {X}}}\times _i{\mathbf {Y}}\) denotes tensor-matrix multiplication along the ith mode (see [29] for example). The cyclic block proximal gradient method for solving (47) performs the following updates cyclically
Here, \(f(\varvec{{\mathcal {C}}},{\mathbf {A}})=\frac{1}{2}\Vert \varvec{{\mathcal {C}}}\times _1{\mathbf {A}}_1\ldots \times _N{\mathbf {A}}_N-\varvec{{\mathcal {M}}}\Vert _F^2\), \(L_c^k\) and \(L_i^k\) (chosen no less than a positive \(L_{\min }\)) are gradient Lipschitz constants with respect to \(\varvec{{\mathcal {C}}}\) and \({\mathbf {A}}_i\) respectively, and \(\hat{\varvec{{\mathcal {C}}}}^k\) and \(\hat{{\mathbf {A}}}_i^k\) are extrapolated points:
with extrapolation weight set to
where \(\omega _k\) is the same as that in Algorithm 2. Our setting of extrapolated points exactly follows [59]. If after the kth iteration, the objective increases, we redo that iteration with no extrapolation. It is interesting to notice that the objective almost always decreases with the above weight and the re-update occurs less than 10 among 500 iterations. Figure 4 shows that the extrapolation technique significantly accelerates the convergence speed of the method. Note that the block-prox method with no extrapolation reduces to the block coordinate gradient method in [56].

Relative errors, defined as \({\Vert \varvec{{\mathcal {C}}}^k\times _1{\mathbf {A}}_1^k\cdots \times _N{\mathbf {A}}_N^k-\varvec{{\mathcal {M}}}\Vert _F}/{\Vert \varvec{{\mathcal {M}}}\Vert _F}\), given by (48) on Gaussian randomly generated \(80\times 80\times 80\) tensor with core size of \(5\times 5\times 5\). No extrapolation: \(\hat{\varvec{{\mathcal {C}}}}^k=\varvec{{\mathcal {C}}}^k, \hat{{\mathbf {A}}}^k={\mathbf {A}}^k,\,\forall k\); With extrapolation: \(\hat{\varvec{{\mathcal {C}}}}^k, \hat{{\mathbf {A}}}^k\) set as in (49) with extrapolation weights by (50)
Since the core tensor \(\varvec{{\mathcal {C}}}\) interacts with all factor matrices, the work [59] proposes to update \(\varvec{{\mathcal {C}}}\) more frequently to improve the performance of the block proximal gradient method. Specifically, at each cycle, it performs the following updates sequentially from \(i=1\) through N
It was demonstrated that (51) numerically performs better than (48). Numerically, we observed that the performance of (51) could be further improved if the blocks of variables were randomly shuffled as in (46), namely, we performed the updates sequentially from \(i=1\) through N
where \((\pi ^k_1,\pi ^k_2,\ldots ,\pi ^k_N)\) is a random permutation of \((1,2,\ldots ,N)\) at the k-th cycle. Note that both (48) and (52) are special cases of Algorithm 1 with \(T=N+1\) and \(T=2N+2\) respectively. If \(\{(\varvec{{\mathcal {C}}}^k,{\mathbf {A}}^k)\}\) is bounded, then so are \(L_c^k, L_c^{k,i}\) and \(L_i^k\)’s. Hence, by Theorem 2, we have the convergence result as follows.
Theorem 7
The sequence \(\{(\varvec{{\mathcal {C}}}^k,{\mathbf {A}}^k)\}\) generated from (48) or (52) is either unbounded or converges to a critical point of (47).
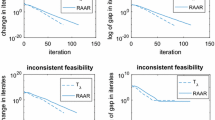
We tested (51) and (52) on the \(32\times 32\times 256\) Swimmer dataset used above and set the core size to \(24\times 17\times 16\). We ran them to 500 cycles from the same random starting point. If the relative error \(\Vert \varvec{{\mathcal {C}}}^{out}\times _1{\mathbf {A}}_1^{out}\ldots \times _N{\mathbf {A}}_N^{out}-\varvec{{\mathcal {M}}}\Vert _F/\Vert \varvec{{\mathcal {M}}}\Vert _F\) is below \(10^{-3}\), we regard the decomposition to be successful, where \((\varvec{{\mathcal {C}}}^{out},{\mathbf {A}}^{out})\) is the output. Among 50 independent runs, (52) with random shuffling succeeds 21 times while (51) succeeds only 11 times. Figure 5 plots all cases that occur. Similar to Fig. 3, every plot is in terms of running time (s), and during that time, both methods run to 500 iterations. From the figure, we see that (52) with fixed cyclic order and with random shuffling has similar computational complexity while the latter one can more frequently avoid bad local solutions.

All four cases of convergence behavior of the method (52) with fixed cyclic order and with random shuffling. Both run to 500 iterations. The first plot implies random version succeeds while the cyclic version fails and occurs 14 times among 50; the second plot implies both two versions succeed and occurs 7 times among 50; the third plot implies cyclic version succeeds while the random version fails and occurs 4 times among 50; the fourth plot implies both two versions fail and occurs 25 times among 50
4 Conclusions
We have presented a block prox-linear method, in both randomized and deterministic versions, for solving nonconvex optimization problems. The method applies when the nonsmooth terms, if any, are block separable. It is easy to implement and has a small memory footprint since only one block is updated each time. Assuming that the differentiable parts have Lipschitz gradients, we showed that the method has a subsequence of iterates that converges to a critical point. Further assuming the Kurdyka–Łojasiewicz property of the objective function, we showed that the entire sequence converges to a critical point and estimated its asymptotic convergence rate. Many applications have this property. In particular, we can apply our method and its convergence results to \(\ell _p\)-(quasi)norm (\(p\in [0,+\infty ]\)) regularized regression problems, matrix rank minimization, orthogonality constrained optimization, semidefinite programming, and so on. Very encouraging numerical results are presented.
Notes
A function f is proximable if it is easy to obtain the minimizer of \(f(x)+\frac{1}{2\gamma }\Vert x-y\Vert ^2\) for any input y and \(\gamma >0\).
A function F on \(\mathbb {R}^n\) is differentiable at point \({\mathbf {x}}\) if there exists a vector \({\mathbf {g}}\) such that \(\lim _{{\mathbf {h}}\rightarrow 0}\frac{|F({\mathbf {x}}+{\mathbf {h}})-F({\mathbf {x}})-{\mathbf {g}}^\top {\mathbf {h}}|}{\Vert {\mathbf {h}}\Vert }=0\)
Note that from Remark 2, for convex problems, we can take larger extrapolation weight but require it to be uniformly less than one. Hence, although our algorithm framework includes FISTA as a special case, our whole sequence convergence result does not imply that of FISTA.
Another restarting option is tested based on gradient information.
References
Aharon, M., Elad, M., Bruckstein, A.: K-SVD: an algorithm for designing overcomplete dictionaries for sparse representation. IEEE Trans. Signal Process. 54(11), 4311–4322 (2006)
Allen, G.: Sparse higher-order principal components analysis. In: International Conference on Artificial Intelligence and Statistics, pp. 27–36. (2012)
Attouch, H., Bolte, J.: On the convergence of the proximal algorithm for nonsmooth functions involving analytic features. Math. Program. 116(1), 5–16 (2009)
Attouch, H., Bolte, J., Redont, P., Soubeyran, A.: Proximal alternating minimization and projection methods for nonconvex problems: an approach based on the Kurdyka–Lojasiewicz inequality. Math. Oper. Res. 35(2), 438–457 (2010)
Attouch, H., Bolte, J., Svaiter, B.F.: Convergence of descent methods for semi-algebraic and tame problems: proximal algorithms, forward–backward splitting, and regularized Gauss–Seidel methods. Math. Program. 137(1–2), 91–129 (2013)
Bagirov, A.M., Jin, L., Karmitsa, N., Al Nuaimat, A., Sultanova, N.: Subgradient method for nonconvex nonsmooth optimization. J. Optim. Theory Appl. 157(2), 416–435 (2013)
Beck, A., Teboulle, M.: A fast iterative shrinkage–thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2(1), 183–202 (2009)
Beck, A., Tetruashvili, L.: On the convergence of block coordinate descent type methods. SIAM J. Optim. 23(4), 2037–2060 (2013)
Bertsekas, D.P.: Nonlinear Programming. Athena Scientific, Belmont (1999)
Blumensath, T., Davies, M.E.: Iterative hard thresholding for compressed sensing. Appl. Comput. Harmon. Anal. 27(3), 265–274 (2009)
Bolte, J., Daniilidis, A., Lewis, A.: The Lojasiewicz inequality for nonsmooth subanalytic functions with applications to subgradient dynamical systems. SIAM J. Optim. 17(4), 1205–1223 (2007)
Bolte, J., Daniilidis, A., Ley, O., Mazet, L.: Characterizations of łojasiewicz inequalities: subgradient flows, talweg, convexity. Trans. Am. Math. Soc. 362(6), 3319–3363 (2010)
Bolte, J., Sabach, S., Teboulle, M.: Proximal alternating linearized minimization for nonconvex and nonsmooth problems. Math. 146(1), 459–494 (2014)
Breheny, P., Huang, J.: Coordinate descent algorithms for nonconvex penalized regression, with applications to biological feature selection. Ann. Appl. Stat. 5(1), 232–253 (2011)
Burke, J.V., Lewis, A.S., Overton, M.L.: A robust gradient sampling algorithm for nonsmooth, nonconvex optimization. SIAM J. Optim. 15(3), 751–779 (2005)
Chang, K.W., Hsieh, C.J., Lin, C.J.: Coordinate descent method for large-scale l2-loss linear support vector machines. J. Mach. Learn. Res. 9, 1369–1398 (2008)
Chartrand, R., Yin, W.: Iteratively reweighted algorithms for compressive sensing. In: IEEE International Conference on Acoustics, Speech and Signal Processing, 2008. ICASSP 2008, pp. 3869–3872. IEEE (2008)
Chen, X.: Smoothing methods for nonsmooth, nonconvex minimization. Math. Program. 134(1), 71–99 (2012)
Donoho, D., Stodden, V.: When does non-negative matrix factorization give a correct decomposition into parts. In: Advances in Neural Information Processing Systems, vol. 16. (2003)
Fan, J., Li, R.: Variable selection via nonconcave penalized likelihood and its oracle properties. J. Am. Stat. Assoc. 96(456), 1348–1360 (2001)
Fuduli, A., Gaudioso, M., Giallombardo, G.: Minimizing nonconvex nonsmooth functions via cutting planes and proximity control. SIAM J. Optim. 14(3), 743–756 (2004)
Ghadimi, S., Lan, G.: Accelerated gradient methods for nonconvex nonlinear and stochastic programming. Math. Program. 156(1), 59–99 (2016)
Grippo, L., Sciandrone, M.: Globally convergent block-coordinate techniques for unconstrained optimization. Optim. Methods Softw. 10(4), 587–637 (1999)
Hildreth, C.: A quadratic programming procedure. Naval Res. Logist. Q. 4(1), 79–85 (1957)
Ho, N., Van Dooren, P., Blondel, V.: Descent methods for nonnegative matrix factorization. In: Numerical Linear Algebra in Signals, Systems and Control, pp. 251–293. Springer, Netherlands (2011)
Hong, M., Wang, X., Razaviyayn, M., Luo, Z.Q.: Iteration complexity analysis of block coordinate descent methods. arXiv preprint arXiv:1310.6957 (2013)
Hoyer, P.: Non-negative matrix factorization with sparseness constraints. J. Mach. Learn. Res. 5, 1457–1469 (2004)
Kim, J., He, Y., Park, H.: Algorithms for nonnegative matrix and tensor factorizations: a unified view based on block coordinate descent framework. J. Global Optim. 58(2), 285–319 (2014)
Kolda, T., Bader, B.: Tensor decompositions and applications. SIAM Rev. 51(3), 455 (2009)
Kruger, A.Y.: On fréchet subdifferentials. J. Math. Sci. 116(3), 3325–3358 (2003)
Kurdyka, K.: On gradients of functions definable in o-minimal structures. Ann. Inst. Fourier. 48(3), 769–783 (1998)
Lai, M.J., Xu, Y., Yin, W.: Improved iteratively reweighted least squares for unconstrained smoothed \(\ell _q\) minimization. SIAM J. Numer. Anal. 51(2), 927–957 (2013)
Lee, D., Seung, H.: Learning the parts of objects by non-negative matrix factorization. Nature 401(6755), 788–791 (1999)
Li, G., Pong, T.K.: Calculus of the exponent of Kurdyka–Lojasiewicz inequality and its applications to linear convergence of first-order methods. arXiv preprint arXiv:1602.02915 (2016)
Ling, Q., Xu, Y., Yin, W., Wen, Z.: Decentralized low-rank matrix completion. In: IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2012, pp. 2925–2928. IEEE (2012)
Łojasiewicz, S.: Sur la géométrie semi-et sous-analytique. Ann. Inst. Fourier (Grenoble) 43(5), 1575–1595 (1993)
Lu, Z., Xiao, L.: Randomized block coordinate non-monotone gradient method for a class of nonlinear programming. arXiv preprint arXiv:1306.5918 (2013)
Lu, Z., Xiao, L.: On the complexity analysis of randomized block-coordinate descent methods. Math. Program. 152(1–2), 615–642 (2015)
Luo, Z.Q., Tseng, P.: On the convergence of the coordinate descent method for convex differentiable minimization. J. Optim. Theory Appl. 72(1), 7–35 (1992)
Mairal, J., Bach, F., Ponce, J., Sapiro, G.: Online dictionary learning for sparse coding. In: Proceedings of the 26th Annual International Conference on Machine Learning, pp. 689–696. ACM (2009)
Mohan, K., Fazel, M.: Iterative reweighted algorithms for matrix rank minimization. J. Mach. Learn. Res. 13(1), 3441–3473 (2012)
Natarajan, B.K.: Sparse approximate solutions to linear systems. SIAM J. Comput. 24(2), 227–234 (1995)
Nesterov, Y.: Efficiency of coordinate descent methods on huge-scale optimization problems. SIAM J. Optim. 22(2), 341–362 (2012)
Nesterov, Y.: Introductory lectures on convex optimization: a basic course, vol. 87. Springer Science & Business Media, Berlin (2013)
Nocedal, J., Wright, S.J.: Numerical Optimization, Springer Series in Operations Research and Financial Engineering., 2nd edn. Springer, New York (2006)
O’Donoghue, B., Candes, E.: Adaptive restart for accelerated gradient schemes. Found. Comput. Math. 15(3), 715–732 (2013)
Paatero, P., Tapper, U.: Positive matrix factorization: a non-negative factor model with optimal utilization of error estimates of data values. Environmetrics 5(2), 111–126 (1994)
Peng, Z., Wu, T., Xu, Y., Yan, M., Yin, W.: Coordinate friendly structures, algorithms and applications. Ann. Math. Sci. Appl. 1(1), 57–119 (2016)
Razaviyayn, M., Hong, M., Luo, Z.Q.: A unified convergence analysis of block successive minimization methods for nonsmooth optimization. SIAM J. Optim. 23(2), 1126–1153 (2013)
Recht, B., Fazel, M., Parrilo, P.: Guaranteed minimum-rank solutions of linear matrix equations via nuclear norm minimization. SIAM Rev. 52(3), 471–501 (2010)
Richtárik, P., Takáč, M.: Iteration complexity of randomized block-coordinate descent methods for minimizing a composite function. Math. Program. 144(1), 1–38 (2014)
Rockafellar, R., Wets, R.: Variational Analysis, vol. 317. Springer, Berlin (2009)
Saha, A., Tewari, A.: On the nonasymptotic convergence of cyclic coordinate descent methods. SIAM J. Optim. 23(1), 576–601 (2013)
Shi, H.J.M., Tu, S., Xu, Y., Yin, W.: A primer on coordinate descent algorithms. arXiv preprint arXiv:1610.00040 (2016)
Tseng, P.: Convergence of a block coordinate descent method for nondifferentiable minimization. J. Optim. Theory Appl. 109(3), 475–494 (2001)
Tseng, P., Yun, S.: A coordinate gradient descent method for nonsmooth separable minimization. Math. Program. 117(1), 387–423 (2009)
Welling, M., Weber, M.: Positive tensor factorization. Pattern Recogn. Lett. 22(12), 1255–1261 (2001)
Wen, Z., Yin, W., Zhang, Y.: Solving a low-rank factorization model for matrix completion by a nonlinear successive over-relaxation algorithm. Math. Program. Comput. 4(4), 333–361 (2012)
Xu, Y.: Alternating proximal gradient method for sparse nonnegative tucker decomposition. Math. Program. Comput. 7(1), 39–70 (2015)
Xu, Y., Akrotirianakis, I., Chakraborty, A.: Proximal gradient method for huberized support vector machine. Pattern Anal. Appl. 19(4), 989–1005 (2016)
Xu, Y., Yin, W.: A block coordinate descent method for regularized multiconvex optimization with applications to nonnegative tensor factorization and completion. SIAM J. Imaging Sci. 6(3), 1758–1789 (2013)
Xu, Y., Yin, W.: A fast patch-dictionary method for whole image recovery. Inverse Probl. Imaging 10(2), 563–583 (2016)
Zhang, C.H.: Nearly unbiased variable selection under minimax concave penalty. Ann. Stat. 38(2), 894–942 (2010)
Acknowledgements
Funding was provided in part by National Science Foundation (Grant No. DMS-1317602 and EECS-1462397) and Office of Naval Research (Grant No. N000141712162).
Author information
Authors and Affiliations
Corresponding author
Additional information
This work is supported in part by NSF DMS-1317602, EECS-1462397, and ONR N000141712162.
Appendices
Appendix 1: Proofs of Key Lemmas
In this section, we give proofs of the lemmas and also propositions we used.
1.1 Proof of Lemma 1
We show the general case of \(\alpha _k=\frac{1}{\gamma L_k},\forall k\) and \(\tilde{\omega }_i^j\le \frac{\delta (\gamma -1)}{2(\gamma +1)}\sqrt{\tilde{L}_i^{j-1}/\tilde{L}_i^{j}},\,\forall i,j\). Assume \(b_k=i\). From the Lipschitz continuity of \(\nabla _{{\mathbf {x}}_i}f({\mathbf {x}}_{\ne i}^{k-1},{\mathbf {x}}_i)\) about \({\mathbf {x}}_i\), it holds that (e.g., see Lemma 2.1 in [61])
Since \({\mathbf {x}}_i^{k}\) is the minimizer of (2), then
Summing (53) and (54) and noting that \({\mathbf {x}}_j^{k+1}={\mathbf {x}}_j^k,\forall j\ne i\), we have
Here, we have used Cauchy–Schwarz inequality in the second inequality, Lipschitz continuity of \(\nabla _{{\mathbf {x}}_i}f({\mathbf {x}}_{\ne i}^{k-1},{\mathbf {x}}_i)\) in the third one, the Young’s inequality in the fourth one, the fact \({\mathbf {x}}_i^{k-1}=\tilde{{\mathbf {x}}}_i^{d_i^k-1}\) to have the third equality, and \(\alpha _k=\frac{1}{\gamma L_k}\) to get the last equality. Substituting \(\tilde{\omega }_i^j\le \frac{\delta (\gamma -1)}{2(\gamma +1)}\sqrt{\tilde{L}_i^{j-1}/\tilde{L}_i^{j}}\) and recalling (8) completes the proof.
1.2 Proof of the Claim in Remark 2
Assume \(b_k=i\) and \(\alpha _k=\frac{1}{L_k}\). When f is block multi-convex and \(r_i\) is convex, from Lemma 2.1 of [61], it follows that
Hence, if \(\omega _k\le \delta \sqrt{\tilde{L}_i^{j-1}/\tilde{L}_i^j}\), we have the desired result.
1.3 Proof of Proposition 1
Summing (14) over k from 1 to K gives
where we have used the fact \(d_i^0=0,\forall i\) in the first equality, \(\tilde{\mathbf{x}}_i^{-1}=\tilde{\mathbf{x}}_i^0,\forall i\) to have the second inequality, and \(\tilde{L}_i^j\ge \ell , \forall i,j\) in the last inequality. Letting \(K\rightarrow \infty \) and noting \(d_i^K\rightarrow \infty \) for all i by Assumption 3, we conclude from the above inequality and the lower boundedness of F in Assumption 1 that
which implies (15).
1.4 Proof of Proposition 2
From Corollary 5.20 and Example 5.23 of [52], we have that if \({\mathbf {prox}}_{\alpha _kr_i}\) is single valued near \({\mathbf {x}}_i^{k-1}-\alpha _k\nabla _{{\mathbf {x}}_i}f({\mathbf {x}}^{k-1})\), then \({\mathbf {prox}}_{\alpha _kr_i}\) is continuous at \({\mathbf {x}}_i^{k-1}-\alpha _k\nabla _{{\mathbf {x}}_i}f({\mathbf {x}}^{k-1})\). Let \(\hat{{\mathbf {x}}}^k_i(\omega )\) explicitly denote the extrapolated point with weight \(\omega \), namely, we take \(\hat{{\mathbf {x}}}^k_i(\omega _k)\) in (6). In addition, let \({\mathbf {x}}^k_i(\omega )={\mathbf {prox}}_{\alpha _kr_i}\big (\hat{{\mathbf {x}}}_i^k(\omega )-\alpha _k\nabla _{{\mathbf {x}}_i}f(\mathbf{x}_{\ne i}^{k-1},\hat{\mathbf{x}}_i^k(\omega ))\big )\). Note that (14) implies
From the optimality of \({\mathbf {x}}^k_i(\omega )\), it holds that
Taking limit superior on both sides of the above inequality, we have
which implies \(\underset{\omega \rightarrow 0^+}{\limsup }\, r_i(\mathbf{x}_i^k(\omega ))\le r_i(\mathbf{x}_i^k(0))\). Since \(r_i\) is lower semicontinuous, \(\underset{\omega \rightarrow 0^+}{\liminf }\, r_i(\mathbf{x}_i^k(\omega ))\ge r_i(\mathbf{x}_i^k(0))\). Hence, \(\underset{\omega \rightarrow 0^+}{\lim }r_i(\mathbf{x}_i^k(\omega ))= r_i(\mathbf{x}_i^k(0))\), and thus \(\underset{\omega \rightarrow 0^+}{\lim }F(\mathbf{x}^k(\omega ))= F(\mathbf{x}^k(0))\). Together with (55), we conclude that there exists \(\bar{\omega }_k>0\) such that \(F({\mathbf {x}}^{k-1})-F(\mathbf{x}^k(\omega ))\ge 0,\,\forall \omega \in [0,\bar{\omega }_k]\). This completes the proof.
1.5 Proof of Lemma 2
Let \({\mathbf {a}}_m\) and \({\mathbf {u}}_m\) be the vectors with their ith entries
Then (21) can be written as
Recall
Then it follows from (56) that
By the Cauchy–Schwarz inequality and noting \(n_{i,m+1}-n_{i,m}\le N,\forall i,m\), we have
and for any positive \(C_1\),
Taking
we have from (58) and (59) that
For any \(C_2>0\), it holds
Combining (57), (61), and (62), we have
Summing the above inequality over m from \(M_1\) through \(M_2\le M\) and arranging terms gives
Take
Then (63) implies
which together with \(\sum _{i=1}^sA_{i,n_{i,m+1}}\le \sqrt{s}\Vert {\mathbf {u}}_{m+1}\Vert \) gives
where we have used \(\Vert {\mathbf {u}}_{M_1}\Vert \le \sum _{i=1}^sA_{i,n_{i,M_1}}\), and
From (60), (64), and (67), we can take
where the inequality can be verified by noting \((1-\beta ^2)(4-(1+\beta )^2)-(1-\beta )^2\) is decreasing with respect to \(\beta \) in [0, 1]. Thus from (64) and (67), we have \(C_2=\frac{1}{2C_1},\, C_3=\frac{C_1}{2},\, C_4=\beta \sqrt{\overline{\alpha }}+\frac{\sqrt{s}C_1}{2}\). Hence, from (66), we complete the proof of (22).
If \(\lim _{m\rightarrow \infty }n_{i,m}=\infty ,\forall i\), \(\sum _{m=1}^\infty B_m<\infty \), and (21) holds for all m, letting \(M_1=1\) and \(M_2\rightarrow \infty \), we have (23) from (66).
1.6 Proof of Proposition 3
For any i, assume that while updating the ith block to \({\mathbf {x}}_i^k\), the value of the jth block (\(j\ne i\)) is \({\mathbf {y}}_j^{(i)}\), the extrapolated point of the ith block is \({\mathbf {z}}_i\), and the Lipschitz constant of \(\nabla _{{\mathbf {x}}_i}f({\mathbf {y}}_{\ne i}^{(i)},{\mathbf {x}}_i)\) with respect to \({\mathbf {x}}_i\) is \(\tilde{L}_i\), namely,
Hence, \(\mathbf {0}\in \nabla _{{\mathbf {x}}_i}f({\mathbf {y}}_{\ne i}^{(i)},{\mathbf {z}}_i)+2\tilde{L}_i({\mathbf {x}}_i^k-{\mathbf {z}}_i)+\partial r_i({\mathbf {x}}_i^k),\) or equivalently,
Note that \({\mathbf {x}}_i\) may be updated to \({\mathbf {x}}_i^k\) not at the kth iteration but at some earlier one, which must be between \(k-T\) and k by Assumption 3. In addition, for each pair (i, j), there must be some \(\kappa _{i,j}\) between \(k-2T\) and k such that
and for each i, there are \(k-3T\le \kappa _1^i<\kappa _2^i\le k\) and extrapolation weight \(\tilde{\omega }_i\le 1\) such that
By triangle inequality, \(({\mathbf {y}}_{\ne i}^{(i)},{\mathbf {z}}_i)\in B_{4\rho }(\bar{{\mathbf {x}}})\) for all i. Therefore, it follows from (10) and (68) that
where in the fourth inequality, we have used the Lipschitz continuity of \(\nabla _{{\mathbf {x}}_i}f({\mathbf {x}})\) with respect to \({\mathbf {x}}\), and the last inequality uses \(\tilde{L}_i\le L\). Now use (71), (69), (70) and also the triangle inequality to have the desired result.
1.7 Proof of Lemma 3
The proof follows that of Theorem 2 of [3]. When \(\gamma \ge 1\), since \(0\le A_{k-1}-A_k\le 1,\forall k\ge K\), we have \((A_{k-1}-A_k)^\gamma \le A_{k-1}-A_k\), and thus (33) implies that for all \(k\ge K\), it holds that \(A_k\le (\alpha +\beta )(A_{k-1}-A_k)\), from which item 1 immediately follows.
When \(\gamma <1\), we have \((A_{k-1}-A_k)^\gamma \ge A_{k-1}-A_k\), and thus (33) implies that for all \(k\ge K\), it holds that \(A_k\le (\alpha +\beta )(A_{k-1}-A_k)^\gamma \). Letting \(h(x)=x^{-1/\gamma }\), we have for \(k\ge K\),
where we have used nonincreasing monotonicity of h in the second inequality. Hence,
Let \(\mu \) be the positive constant such that
Note that the above equation has a unique solution \(0<\mu <1\). We claim that
It obviously holds from (72) and (73) if \(\big (\frac{A_{k}}{A_{k-1}}\big )^{1/\gamma }\ge \mu \). It also holds if \(\big (\frac{A_{k}}{A_{k-1}}\big )^{1/\gamma }\le \mu \) from the arguments
where the last inequality is from \(A_{k-1}^{1-1/\gamma }\ge 1\). Hence, (74) holds, and summing it over k gives
which immediately gives item 2 by letting \(\nu =(\mu ^{\gamma -1}-1)^{\frac{\gamma }{\gamma -1}}\).
Appendix 2: Solutions of (46)
In this section, we give closed form solutions to both updates in (46). First, it is not difficult to have the solution of (46b):
Secondly, since \(L_{\pi _i}^k>0\), it is easy to write (46a) in the form of
which is apparently equivalent to
which \({\mathbf {c}}={\mathbf {a}}-{\mathbf {b}}\). Next we give solution to (75) in three different cases.
Case 1 \({\mathbf {c}}<0\). Let \(i_0={{\mathrm{\hbox {arg max}}}}_i c_i\) and \(c_{\max }=c_{i_0}<0\). If there are more than one components equal \(c_{\max }\), one can choose an arbitrary one of them. Then the solution to (75) is given by \(x_{i_0}=1\) and \(x_i=0,\forall i\ne i_0\) because for any \({\mathbf {x}}\ge 0\) and \(\Vert {\mathbf {x}}\Vert =1\), it holds that
Case 2 \({\mathbf {c}}\le 0\) and \({\mathbf {c}}\not <0\). Let \({\mathbf {c}}=({\mathbf {c}}_{I_0},{\mathbf {c}}_{I_-})\) where \({\mathbf {c}}_{I_0}=\mathbf {0}\) and \({\mathbf {c}}_{I_-}<0\). Then the solution to (75) is given by \({\mathbf {x}}_{I_-}=\mathbf {0}\) and \({\mathbf {x}}_{I_0}\) being any vector that satisfies \({\mathbf {x}}_{I_0}\ge 0\) and \(\Vert {\mathbf {x}}_{I_0}\Vert =1\) because \({\mathbf {c}}^\top {\mathbf {x}}\le 0\) for any \({\mathbf {x}}\ge 0\).
Case 3 \({\mathbf {c}}\not \le 0\) Let \({\mathbf {c}}=({\mathbf {c}}_{I_+},{\mathbf {c}}_{I_+^c})\) where \({\mathbf {c}}_{I_+}>0\) and \({\mathbf {c}}_{I_+^c}\le 0\). Then (75) has a unique solution given by \({\mathbf {x}}_{I_+}=\frac{{\mathbf {c}}_{I_+}}{\Vert {\mathbf {c}}_{I_+}\Vert }\) and \({\mathbf {x}}_{I_+^c}=\mathbf {0}\) because for any \({\mathbf {x}}\ge 0\) and \(\Vert {\mathbf {x}}\Vert =1\), it holds that
where the second inequality holds with equality if and only if \({\mathbf {x}}_{I_+}\) is collinear with \({\mathbf {c}}_{I_+}\), and the third inequality holds with equality if and only if \({\mathbf {x}}_{I_+^c}=\mathbf {0}\).
Appendix 3: Proofs of Convergence of Some Examples
In this section, we give the proofs of the theorems in Sect.3.
1.1 Proof of Theorem 6
Through checking the assumptions of Theorem 2, we only need to verify the boundedness of \(\{{\mathbf {Y}}^k\}\) to show Theorem 6. Let \({\mathbf {E}}^k={\mathbf {X}}^k({\mathbf {Y}}^k)^\top -{\mathbf {M}}\). Since every iteration decreases the objective, it is easy to see that \(\{{\mathbf {E}}^k\}\) is bounded. Hence, \(\{{\mathbf {E}}^k+{\mathbf {M}}\}\) is bounded, and
Let \(y_{ij}^k\) be the (i, j)th entry of \({\mathbf {Y}}^k\). Thus the columns of \({\mathbf {E}}^k+{\mathbf {M}}\) satisfy
where \({\mathbf {x}}_j^k\) is the jth column of \({\mathbf {X}}^k\). Since \(\Vert {\mathbf {x}}_j^k\Vert =1\), we have \(\Vert {\mathbf {x}}_j^k\Vert _\infty \ge 1/\sqrt{m},\,\forall j\). Note that (76) implies each component of \(\sum _{j=1}^p y_{ij}^k {\mathbf {x}}_j^k\) is no greater than a. Hence from nonnegativity of \({\mathbf {X}}^k\) and \({\mathbf {Y}}^k\) and noting that at least one entry of \({\mathbf {x}}_j^k\) is no less than \(1/\sqrt{m}\), we have \(y_{ij}^k\le a\sqrt{m}\) for all i, j and k. This completes the proof.
Rights and permissions
About this article

Cite this article
Xu, Y., Yin, W. A Globally Convergent Algorithm for Nonconvex Optimization Based on Block Coordinate Update. J Sci Comput 72, 700–734 (2017). https://doi.org/10.1007/s10915-017-0376-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10915-017-0376-0