
Abstract
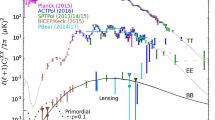
Precise measurements of polarization patterns in cosmic microwave background (CMB) provide deep knowledge about the begin of the Universe. The GroundBIRD experiment aims to measure the CMB polarization by using microwave kinetic inductance detector (MKID) arrays. The MKID is suited to multiplexing. One of our requirements is a MUX factor (the number of readout channels for a single wire pair) of at least 100. If we make frequency combs of the MKIDs with 2-MHz spacing, a bandwidth of 200 MHz satisfies 100 MUX. The analog electronics must consist of an analog-to-digital converter (ADC), digital-to-analog converter (DAC), and local oscillator. We developed our own analog electronics board “RHEA.” Two outputs/inputs of DAC/ADC with a 200-MHz clock provide an effective bandwidth of 200 MHz. The RHEA allows us to measure both the amplitude and phase responses of each MKID simultaneously. These data are continuously sampled at a high rate (e.g., 1 kSPS) and with no dead time. We achieved 12 and 14 bits resolution for ADC and DAC, respectively. This corresponds to achieve that our electronics achieved low noise: 1/1000 compared with the detector noise. We also achieved low power consumption compared with that of other electronics development for other experiments. Another important feature is that the board is completely separated from the digital part. Each user can choose their preferred field-programmable array. With the combination of the Kintex-7 evaluation kit from Xilinx, we demonstrated readout of MKID response.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
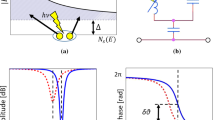
A microwave kinetic inductance detector (MKID) is a new-generation superconducting detector [1]. As shown in Fig. 1, the MKID consists of three components: an antenna that detects photons, superconducting microwave resonators, and a feed line for a readout of the response. Such a superconducting LC circuit produces a sharp dip in radio frequency (RF) transmission through the feed line. The location of the dip corresponds to a resonant frequency of the MKID. The deposition of energy due to the antenna affects the quality of the superconducting condition; i.e., larger energy deposition results in a larger number of Cooper-pair breaks. This effect is detected as a change in either the amplitude or phase around the resonance peak. The application of the MKID to cosmic microwave background radiation (CMB) observations would allow the use of the natural frequency domain and provide a fast time response. The use of the natural frequency domain minimizes thermal loads of detector arrays, while the fast time response well matches the fast modulation of an observed signal such as in the GroundBIRD experiment [2].

Detection principle of the MKID. a The MKID consists of three components: an antenna that detects photons, superconducting microwave resonators that are adjusted to a quarter wavelength, and a feed line for a readout of the response. b The MKID is equivalent to a LC resonant circuit. Each resonator has a specific resonance frequency. c The resonant circuit has a narrow dip at the resonance frequency, which moves to lower frequency as the inductance increases. d We can also detect a variation in phase (Color figure online)
There are two methods for MKID readout: a direct down-conversion (DDC) method [3] and a fast Fourier transformation method [4]. CMB observation requires deadtime-less readout and maximization of the MKID’s sensitivity. We choose the DDC method to fulfill these requirements because the method allows optimum frequencies to be set individually for each frequency comb. Precise setting of the comb increases the responsivity of the MKID, which generally results in better sensitivity. Two functions are important in realizing deadtime-less readout: high-speed sampling faster than the MKID’s response (10–100 \(\upmu \)s) and data averaging that reduces the size of the transferred packet.

Diagram of the readout system. (1) Digital electronics generate digital RF waves that are the sum of each frequency comb. For simultaneous readout of the amplitude and phase, two waves with a phase offset of 90\(^\circ \) (i.e., cosine and sine waves) are needed for each comb. (2) Two digital-to-analog converters in analog electronics generate RF signals based on the digital RF signal. (3) The feed signal is constructed by coupling the cosine and sine waves and the frequency is up-converted using a local oscillator (LO). (4) The amplitude and phase of each comb are varied in the MKID. (5) The cosine and sine waves are decoupled and the frequency is down-converted using the same LO. (6) Two analog-to-digital converters in the analog electronics convert return RF signals to digital RF waves. (7) In-phase (I) and quadrature-phase (Q) signals for each MKID comb are extracted and down-sampled using DDC logic
An overview of our readout system is shown in Fig. 2. Logic functions for step (1) and (7) are implemented in a field-programmable gate array (FPGA) on the digital board. We developed this logic previously [5]. The main roles of the analog board are to carry out steps (2) and (6). Remaining functions are managed by commercially available components, such as a IQ modulator and IQ demodulator. The multiplexing factor (MUX) is the number of readout channels for a single wire pair and is one of the important specifications of the MKID readout. In general, the wider bandwidth provides us the larger MUX.
2 Design of Analog Interface Board “RHEA”
GroundBIRD requires a MUX value of at least 100. The use of a commercially available digital board with a high-grade FPGA would allow us to implement the digital logic. However, there are no analog-interface electronics commercially available for such a multiplex factor. Therefore, we developed our own analog electronics board Rhea is a High spEed Analog board (“RHEA”), which is optimized for GroundBIRD (Fig. 3). If we make frequency combs with 2-MHz spacing, we need bandwidth of 200 MHz to achieve a MUX value of 100. The analog electronics mainly consist of an analog-to-digital converter (ADC), digital-to-analog converter (DAC), and their clock. Two outputs/inputs of DAC/ADC operated with a 200-MHz clock allow us to measure both phase and amplitude responses of the MKID with a continuously high sampling rate (1 kSPS with deadtime-less readout for GroundBIRD). Our designs for the clock distribution and power supply circuit are simple, and the power consumption of analog parts is thus low compared with the power consumption of similar electronics used for other purposes. These features result in the long-term stability of the system and simplify the FPGA coding. Another important feature is that the board is completely separated from the digital part. All functions can be controlled via the FPGA mezzanine card (FMC) low pin count (LPC) connector. The user can choose their preferred FPGA. Specification of these chips are summarized in Table 1.

A picture and block diagram of the analog electronics board “RHEA.” RHEA consists of an ADC, DAC, and crystal oscillator. A SMA connector is employed for the interfaces of the four analog signals (i.e., two inputs and two outputs) and a FMC LPC connector is employed for digital interfaces (Color figure online)
3 Performances of RHEA
3.1 Low Power Consumption and No Overheating
We measured the surface temperature of the electronics system employing infrared thermography (Keysight U5855A) as shown in Fig. 4. Here we employed digital logic with a MUX value of 32 using the Kintex-7 evaluation kit from Xilinx. Even without a cooling fan, the operation temperatures in a room are at most 38 and 56\(^\circ \)C for the analog board and digital board, respectively. The power consumption is only 23 W, which is roughly half of that of our previous development [5].

Surface temperature of the front–end electronics (Color figure online)
3.2 Noise Level
We fed test signal from a function generator to the ADC. The noise level of the ADC was determined as a noise floor of power spectrum density. For the DAC, we measured its noise floor by using spectrum analyzer. We achieved 12 bits and 14 bits resolution for the ADC and DAC, respectively. As shown in Table 1, we lost roughly 2 bits compared with intrinsic resolution for each chip in catalogs. These achievements correspond to have noise level of \(10^{-8}\) rad\(/\sqrt{\mathrm{Hz}}\) in phase response of the MKID. Here, we assume 100 MUX readout configuration. This is low enough compared with expected noise level of the MKID, \(10^{-5}\) rad\(/\sqrt{\mathrm{Hz}}\), for expected observing condition (i.e., noise equivalent temperature of \(10^{-17}~\mathrm{W}/ \sqrt{\mathrm{Hz}}\)).
3.3 Bandwidth of Demodulated Signals
We measured the response for demodulated signals. Figure 5 shows the amplitude and phase responses as functions of the comb frequency. We measured the responses using a simplified configuration; i.e., RF waves from the DAC go directly to the ADC. The sign of the frequency corresponds to the sign of the phase difference between generated RF waves; i.e., \(+90^\circ \) or \(-90^\circ \). These results satisfy our requirement for a bandwidth of 200 MHz.

Demodulated responses of the amplitude and phase as functions of the comb frequency (Color figure online)
3.4 Demonstration of MKID Readout
Functions for the MKID readout were confirmed using a Nb-MKID cooled to 300 mK. Figure 6 shows the amplitude and phase responses as functions of the frequency of the RF signal fed into the MKID. We confirm a clear response of the MKID for both the amplitude and phase. We also confirm a proper (i.e., circular) response in the IQ plane. We thus demonstrated functions of simultaneous readout for the amplitude and phase.

Demonstration of the readout system incorporating the front–end electronics (Color figure online)
4 Summary
We developed front–end electronics that are able to readout 100 elements of the MKID for the GroundBIRD experiment. As the initial step, we developed our own analog electronics, RHEA. We confirmed the proper function of these electronics; i.e., simultaneous readout of amplitude and phase responses without any dead time, with 200-MHz bandwidth, and with low power consumption (23 W which is a half of our previous developments). We also confirmed that the noise level of this electronics is roughly three orders of magnitude lower than the noise of the detector in the case of CMB observation. These confirmations make an conclusion that the combination of Kintex-7 and RHEA satisfies our requirements, i.e., 100 MUX. Moreover, it is easy to extend the MUX number using the latest FPGA family; e.g., 200–300 MUX is possible for the Kintex UltraScale. We thus developed analog electronics that satisfy the requirements of the GroundBIRD experiment. Applicability with various FPGA families is another benefit of this analog board.
References
P.K. Day, H.G. LeDuc, B.A. Mazin, A. Vayonakis, J. Zmuidzinas, Nature 425, 817–821 (2003)
S. Oguri et al., J. Low Temp. Phys. 176, 691–697 (2014)
O. Bourrion, A. Bideaud, A. Benoit, A. Cruciani, J.F. Macias-Perez, A. Monfardini, M. Roesch, L. Swenson, C. Vescovi, JINST 6, P06012 (2011)
S.J.C. Yates, A.M. Baryshev, J.J.A. Baselmans, B. Klein, R. Guesten, APL 95(4), 042504 (2009)
K. Karatsu, S. Mima, S. Oguri et al., IEICE Trans. Electron. E98–C(3), 207 (2015)
Acknowledgments
This work is supported by Grants-in-Aid for Scientific Research from The Ministry of Education, Culture, Sports, Science, and Technology, Japan (KAKENHI 26247045 and 15H05743). We also acknowledge support from the Open Source Consortium of Instrumentation (Open-It).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ishitsuka, H., Ikeno, M., Oguri, S. et al. Front–End Electronics for the Array Readout of a Microwave Kinetic Inductance Detector Towards Observation of Cosmic Microwave Background Polarization. J Low Temp Phys 184, 424–430 (2016). https://doi.org/10.1007/s10909-015-1467-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10909-015-1467-7