
Abstract
Bumblebees move about their environments by flying and by walking. Most experimental studies have addressed navigation during foraging flights, but we presented our experimental bees with the challenge of learning to navigate while walking as they must do in nature within topographically complex spaces containing their nests. We trained bumblebee workers to navigate complex, nine-channel, mazes in the absence of specific visual, chemical or textural cues. They successfully navigated through complex multi-turn mazes (stereotypical “rat mazes”) with several dead-ends by memorizing the entire sequence of appropriate turns, and their choice of correct first turn on entering the maze. Thus, their observed proficiencies indicated that the individual bumblebees had each memorized the maze by learning motor sequences which were not linked to visual, chemical or textural stimuli, and that their memories were triggered by contextual cues associated with the bees’ positions in a sequence. Our findings have implications on natural ambulatory activities inside and outside the colony, and even in practical use as vectors of biological control agents.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
In orienting themselves in their environments, animals, especially central-place foragers (i.e. foragers that go from and to a specific location such as a hive or nest), memorize landmarks (visual, olfactory, tactile) and other information and retrieve stored information as necessary as they navigate. Animal navigation, and the cues involved, have been studied under manipulated and mapped environments in nature, in enclosed spaces as large as planetaria and as small as laboratory bench-top choice chambers and mazes. Such environments are useful tools to study route navigation and spatial learning in various subject animals (Munn 1950; Olton 1977; Gallistel 1990; Wehner and Menzel 1990; Collett and Zeil 1998; Healy 1998; Chameron et al. 1998; Anderson 2000; Reynolds et al. 2013). It is now well known that ants, bees and wasps are guided by olfactory and visual landmarks when following paths and travelling from and returning to their nests (Baerends 1941; Thorpe 1950; Janzen 1971; Rosengren 1971; Heinrich 1976; Collett 1992; Collett et al. 1992; Wehner 1992; Chittka et al. 1995; Wehner et al. 1996; Thomson et al. 1997; Ohashi and Thomson 2012; Lihoreau et al. 2012).
Bumblebees forage by flying to and from their nests and perform many tasks by walking. Within the nest, the queen, workers and even drones (Cameron 1985) attend the brood, maintain and expand the nest (Sladen 1912; Free and Butler 1959; Goulson 2010). Bumblebees build their nests in piles of stones, underground in cavities, and in buildings. In such places, they must walk and navigate through topographically simple to complex spaces, but few studies have addressed ambulatory navigation in bees. Our study used walk-through mazes to examine the abilities of bumblebees to learn to navigate while walking rather than flying.
There is a long history of maze learning studies in vertebrates, primarily rats, mice, and pigeons (Dale 1988; Anderson 2000). In contrast, few studies have used mazes to study navigation in invertebrates. Most of those studies have used simple, single bifurcation choice chambers (T- or Y-mazes) to examine the sorts of cues used in navigation (e.g. flat worms of the now-infamous Worm Runner’s Digest (see McConnell 1966)), crayfish (Tierney and Andrews 2013), cuttlefish (Cartron et al. 2012), fruit fly Drosophila spp (Quinn et al. 1974; Hay 1975; Bicker and Spatz 1976; Tully 1984) and especially ants (Hymenoptera; Formicidae) (Goetsch 1957; Schneirla 1941; Bernstein and Bernstein 1969; Muller and Wehner 1988; Chameron et al. 1998; Wilson and Hölldobler 1990). These mazes have also been used to examine cues (visual, olfactory, tactile) used by eusocial bees (Hymenoptera: Apidae), mostly worker caste of western honeybees (Apis mellifera) (Menzel 1981, 1990; Kevan and Lane 1985; Zhang et al. 1998; 2000) and worker caste of bumblebees (Bombus spp.); (Chittka 1998; Dyer et al. 2007; Dyer et al. 2008; Han et al. 2010). Slightly more complex are multilateral choice chambers (Colton and Samuelson 1976) in which the subject animals face an array of choices, such as of colours (as with Kevan’s (1979) multilateral visiometer), shapes (Lehrer et al. 1995), scent (Martin 1965) or drug-laced water (Pick and Yanai 1983). Bumblebees placed in a 12-arm radial choice chamber showed an ability to distinguish radial vs. concentric visual patterns (Plowright et al. 2006; Séguin and Plowright 2008).
Multiple-turn mazes (e.g. stereotypical rat-mazes (Honzik 1936)) have been rarely used to examine navigational capacities by invertebrates. Learning of complex mazes has been demonstrated in ants and bees; they have proven to be skilled at reaching a food source by navigating mazes, mostly with sensory (visual, olfactory, textural) cues provided at choice points (Schneirla 1929; Weiss 1953; Collett et al. 1993; Collett and Baron 1995; Zhang et al. 1996; Zhang et al. 1998, 1999; Chameron et al. 1998). Fruit flies (Drosophila melanogaster) have also been shown to navigate multiple bifurcation mazes with illuminated end points (Hay 1975), in completed darkness (Bicker and Spatz 1976), and with textural cues (Platt et al. 1980). Zhang et al. (1996) studied flying honeybees’ abilities to navigate complex labyrinths containing many “dead ends” that involved making a correct choice at each turn to achieve the reward. Zhang et al. (2000) explored worker honeybees’ capabilities to navigate in flight through four types of mazes: constant turn, zig-zag turns, irregular and variable turns. Their results showed that the bees could learn to navigate all four types of mazes but performed best in the constant-turn mazes and increasingly poorly in the zig-zag mazes, the irregular mazes, and the variable irregular mazes. Although multi-turn maze learning and ambulatory navigation (such as we have used) may seem unnatural, it may be important in bumblebees’ lives within and immediately beyond the nest.
Our Study Examines the Question
Can worker bumblebees navigate complex, multiple-turn, irregular (but not variable) mazes, consisting of several “dead ends” and involving making correct decisions to accomplish the goal of passing through the mazes?
General Methods
Foragers of Bombus impatiens (Cresson, 1863) (Hymenoptera: Apoidea) from queen-right colonies of 30–40 workers/colony (supplied by BioBest Biological Systems Canada [Leamington, Ontario]) were used in the experiments. We started with 5 colonies, but used only the three that had the greatest similarities in learning abilities at the very start (see below for similarity criteria (SCs)). We continued to monitor for inter-colony differences in navigation as our experiments progressed (as described below). When not being tested, colonies were provided with a constant supply of pollen prepared from honeybee collected pollen from the Honeybee Research Centre, University of Guelph and freshly made 50 % sugar syrup (w:w). Four different colonies were used in the experiments.
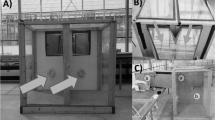
Experiments were conducted in indoor screened flight cages (2.15 m long × 1.20 m wide × 1.80 m tall) with grey floors. The flight cages were set up inside a flight room illuminated by 10, 60 W daylight fluorescent tubes set for 12 h light (when the experiments were made) and 12 h darkness. A moveable screen on one side of each cage allowed access. One bumblebee colony was connected to a small, outer cage (30 × 23 × 20 cm) that served as a holding area (Fig. 1). The holding area was attached to the main flight cage (testing arena) by gated, wire-mesh tunnels that allowed control of the bees’ entry to the flight cage and the maze. During experiments, bees exiting the hive could take only one route through the holding area to the testing arena (the gate on the diagonal route was kept closed). The gates between the holding area and the testing arena were manipulated as needed to allow single bees to enter the testing arena. Once in the testing arena, bees had to navigate through the maze to access a feeding area that was located 165 cm from entrance and exit points. The feeding area consisted of a green Styrofoam plate 45 x 35 x 5 cm with 8 holes that held microcentrifuge tubes (1.5 ml). The tubes, hidden from the bees, were filled with 50 % w:w sucrose solution (syrup) as the reward. The amount of syrup was not controlled, but was replenished as soon as it was exhausted. After foraging in the feeding area, bees were allowed to return to the hive via the diagonal route.

Experiment setup showing hive, holding area, flight cage testing arena, feeding area and mesh tube (tunnels) routes with gates by which the bees were allowed to enter and exit the flight cage. The bees, in training or as trained, exited from the hive and could take only one route through the holding area to the testing arena in the main flight cage. The exiting bees were not allowed to use the diagonal route because the gate in it was kept closed. The gates after the holding area are opened and closed to allow single bees to enter the maze (Fig. 2) in the testing arena during trials. The bees returned to their hive from the testing area via the diagonal mesh tube route without having to navigate the maze, the gate of which was opened as necessary
Description of the Maze (Fig. 2)

Multiple-turn maze with several dead ends made from a solid block of white high density polyethylene so that it had the same white colour for the walls and the floor
The maze was 13 x 13 x 2.1 cm with nine rows (channels). The path through the maze contains several dead ends and many turns to right and left. A prototype cardboard (non-washable) maze was made to make initial tests of experimental feasibility. The results were positive (below). Because it is known that bumblebees can leave chemical footprint as signals (Free 1987; Free and Butler 1959; Goulson et al. 2000; Saleh et al. 2007; Wilms and Eltz 2008) we then had three identical, washable, mazes made to be used for the experiments reported. They were made of opaque white plastic (high density polyethylene) walls and floor and covered with a transparent Plexiglas lid. In this maze visual cues were absent as there was no colour difference between the walls and the floor. There may have been slight textural differences resulting from the machining that left circular marks on the floor and vertical marks on the walls and perhaps shadows (imperceptible to the investigators) from the diffuse lighting in the flight room. The mazes were sufficiently small and deep that bees within them would be unable to see over the opaque channels. Directly overhead, diffused light from the fluorescent illumination entered the testing arena through the screen roof remained the same in all experiments. The plastic mazes were washed with 70 % ethanol in water and wiped dry after each use to remove any water and alcohol soluble residues (e.g. footprint chemicals of straight-chain saturated and monounsaturated hydrocarbons 21–31 carbon atoms long (Goulson et al. 2000; Wilms and Eltz 2008)) left by the bees.
Prior to the start of the experiments, naïve bees were allowed to forage for syrup in the feeding area for 7–10 days to accustom them to foraging in the experimental arena, but without the maze. During this period, bees had direct access from the hive to the flight cage (i.e. through mesh tubes and holding area) and returning through the diagonal mesh tube. After this period of conditioning was complete, but prior to the start of the experiments, bees were marked individually on their thoracic dorsal surfaces with uniquely numbered and coloured tags (Opalith Plättchen, Christian Graze KG, Germany). Colonies, when not being tested, had constant pollen supplies and their diets supplemented with sugar syrup.
Experiment Procedure
First, the bees were restricted from flying directly to the feeder by having to crawl through a screen tube that opened into the maze. Thus, to forage, the subject had to pass through the maze to exit and then fly to the feeding area. Because some bees took a long time to accomplish the task, or failed to pass through the maze, a criterion of a maximum of 20 min to achieve success was established. Bees that failed to pass through the maze in 20 min were removed from the maze and eliminated from the experiment.
For the behavioural assay of the possible effects of trail-marking chemicals in the prototype cardboard maze, we timed how long it took for each of 15 bees (in the order of their entering the maze) tested to complete their passage through the maze and noted where in the order those bees that failed to navigate the maze came. We reasoned that if the first few bees to encounter the maze had the greatest difficulty and either failed or took longer than the last few bees, the latter bees might have had the benefit of a chemical trail left by previous bees. We tested that hypothesis with Spearman’s Rank Correlation. We followed this protocol for all experiments thereafter.
For each successful individual, and each time it passed through the maze, we recorded choices of turning left or right, traveling time (by stop watch, +/− 0.1 s) to pass through the maze, and how many mistakes (mistakes measured as turning in the wrong direction and/or once having turned in the correct direction, changing direction) were made. We also recorded the number of times each bee navigated the maze before it did so without error.
Maze Navigating Experiment
Each individual marked bee was allowed to enter the maze directly through the mesh tunnel leading to the maze in the flight cage. Again, each bee was left to learn its way through the maze without interference by the experimenter. For each individual bee, we recorded the first turn (left or right (correct)) and the amount time (as above) required to navigate through the maze was recorded for 20 passes through the maze (5 passes/ bee in the first day and 15 passes/ bee in the second day). We also noted the number of passes required before the bee could navigate the maze without error.
To assess that the three colonies tested comprised bees with similar in learning abilities (see Raine and Chittka 2008), we used 6 similarity criteria (SCs) derived from the results of our experiments. We compared SCs 1, 2 and 3 as the amounts of time it took the successful bees from each colony (12 of 15, 14 of 15 and 12 of 15 for colonies 1, 2 and 3 respectively) to pass through the maze on their first encounters with it, on their first 5 encounters and their last 5 encounters. SC 4 compared the learning curves by repeated measures ANOVA. SC 5 compared by the exponent of the power function model fitting the learning curve (Ritter and Schooler 2002) and SC 6 compared the ZPDs (Zone of Proximal Development) (after Vygotsky 1987) quantifies learning rates as the difference between a) the time taken to solve a problem at first encounter and b) the time taken after the solution to the problem has been learned (Mirwan and Kevan 2014) for each bee according to its colony of origin.
Data Analysis
Spearman’s Rank Correlations were used to test the hypothesis that the order in which the bees entered the mazes was correlated with the time it took the bees to navigate through. If there were a correlation with the first bees taking longer than subsequent bees, then chemical trail marking could be invoked.
A simple chi-square test was used to assess if the bees chose to turn right (R) or left (L) on entering the mazes for the very first time (expectation 1:1::L:R) and in subsequent entries into the mazes (expectation for departure from 1:1::L:R as the bees learned how to navigate).
To test the hypothesis that the skill of the individual bees did not deteriorate overnight, the number of errors made by the bees on their final (5th) trial on Day 1 was compared with the number of errors they made on their first trial on Day 2, we used a pairwise t-test and chi-square tests.
After it was determined that the data sets conformed to the assumptions of normality of distribution, one and two way repeated measurement ANOVA (SAS 2014) was used to a compare the results of the experiments and to analyze our findings (i.e. to test the hypotheses that the colonies did not differ significantly from each other in terms of a) the time the individual bees from each colony took to navigate through the mazes, b) the number of mistakes made by individual bees, from the three colonies, while traversing the mazes over 20 trials, and c) ZPD.
Results
Possible Influence of Trail-Marking
We found no correlation between the order in which the bees entered the prototype cardboard maze and the time it took the bees to navigate through (Spearman’s Rank Correlation = −0.090; p = 0.75). In all subsequent experiments in plastic mazes, we obtained similarly insignificant Spearman’s Rank Correlations (for three colonies, analyses resulted in a Spearman’s Rank Correlation ranging from −0.37 to 0.31 (p = 0.17 to 0.39).
Maze Navigating and Similarities (SCs) Between Colonies
Worker bumblebees (B. impatiens) (from colonies 1, 2, and 3) could navigate through the maze without reference to visual cues. With increasing experience, the bees became better and better as they came to navigate the maze at their maximum speeds (Fig. 3). There were no significant differences between the three colonies in the times it took the bees to navigate the maze for the first time (SC 1: F2,14 = 0.45; P = 0.65) nor for the first (SC 2: F2,4 = 1.3; P = 0.29) or last (SC 3: F2,4 = 2.33; P = 0.11) 5 trials. There were no differences in the times it took the bees from the different colonies to navigate the maze over the 20 trials (SC 4) (ANOVA repeated measures F2,19 = 2.07; P = 0.14) (Fig. 3). The exponents for the power function models of the learning curves were all similar (SC 5), ranging from −1.23 to–1.38 (Fig. 3). The ZPD values (SC 6) for the bees from each colony did not differ significantly either (F2,11 = 0.15 ; P = 0.86). As expected, there were significant differences between trials made during our experiments as the bees became increasingly adept (F2,19 = 90.74; P < 0.0001).

The mean (±SE) of the durations (seconds) taken by the bees from three different colonies to navigate through the maze from their first encounter (trial 1) to their 20th trial together with the power function model equation and least-squares fit (R2 ) for the learning curves
The same similarities between colonies can be seen in Fig. 4 for the numbers of mistakes (about 7 mistakes for inexperienced bees on their very first encounter within the maze) vs. less than 1 for experienced bees with perfection (no, or almost no, mistakes) after several trials. The number of mistakes that the bees made declined so that after 2 days and 17 trials they navigated the maze without errors, there were no significant differences between the 3 colonies of bees in the total numbers of mistakes they made over 20 trials (F2,19 = 0.77; P = 0.47) but, as noted above, there were significant differences between the trials (F2,19 = 68.38; P < 0.0001) (Fig. 4). Because overnight recall of learnt information or skills is imperfect in bumblebees (Keasar et al. 1996) we also examined, for the three colonies, the numbers of mistakes by the individual bees made on the first day for five trials and compared them with the first five trials on the second day. When the number of mistakes made by the bees on their final (5th) trial on Day 1 was compared with the number of mistakes they made on their first trial on Day 2, we found no significant differences over all colonies combined (paired t-test for each bee, t38 = 1.84; p = 0.074) nor in colonies 2 and 3 (χ2 = 6.01; p = 0.87, χ2 = 10.27; P = 0.50 respectively), however, there was a significant difference in Colony 1 which showed more errors in the first trial of the 2nd day than on the 5th trial of the first (χ2 = 27.84; P = 0.009).

The mean (±SE) numbers of mistakes made by bees from three different colonies when navigating through the maze. The findings are presented by groups of trials (trials 1–4 combined; 5–8 combined; to 17–20 combined)
The maze had the entry hole in the middle of its front wall. The bees had to choose first of all upon entering the maze between turning left or right (the correct direction for continued navigation through the maze). As expected, the inexperienced bees, regardless of colony, made random choices in their very first turns on entering the maze (expected errors by random choice 50 %) (χ2 = 0.04; P = 0.84) (Fig. 5). Once the bees became experienced their error rate on entering the maze was non-random and to the right (correct) (χ2 = 81.0; P < 0.0001) (Fig. 5).

The percent (±SE) of bee-choices for the correct (to the right) first turn by tested bees entering the maze. The findings are presented by groups of trials (trials 1–4 combined; 5–8 combined; to 17–20 combined)
Discussion
We have shown that worker bumblebees (Bombus impatiens) can learn to navigate by walking through complex mazes with multiple turns and several dead ends, as used in classical conditioning with vertebrates (Honzik 1936). Our results also indicate that the bees did not use chemical signals from possible trail-marking (Corbet et al. 1984; Free 1987). Throughout our experiments, our results indicate that the colonies did not differ in their capacities to learn to navigate.
Our results indicate that foragers of B. impatiens have the capacity to negotiate multi-turn maze in the absence of visual and chemical cues. Zhang et al. (2000) suggested that honeybees learn by using a fixed motor program, possibly linked to some form of path integration, as our results also suggest. There are few studies with bumblebees (Bombus spp.) and these studies used only simple bifurcation mazes (e.g. Chittka 1998; Chittka and Thomson 1996; 1997) to study cue discrimination (choice) and memory. We are not aware of complex maze-learning experiments made with bumblebees. However, the fascinating results obtained by Reynolds et al. (2013) may have similarities to our findings. They also found that worker bumblebees were able to improve their navigational performances in the complex environment of the field through sequential experiences whereby the subjects learnt, adapted and relearnt so as to reduce and eventually minimize overall travel distances and times while foraging at artificial nectar stations
The bees in our experiment with a complex maze of 9 channels, each with only one successful exit, took a long time (between 10 and 15 mins) at first to pass through the maze, and required numerous of attempts to pass through maze without making mistakes, but improved their performances markedly after a few trials (Fig. 4). They navigated the mazes without mistake after 15–17 trials and did so in about 30 s. Even though one might expect some deterioration of performance overnight (Keasar et al. 1996), our results indicate that such was not a significant influence. Once bees had learned to navigate the mazes, there were no differences in their subsequent performances over 20 trials as measured by the number of errors the bees made within the maze or the time they took to successfully traverse it (Figs. 4 and 5).
Although bumblebees forage by flying to and from their nests, they perform many tasks by walking. Within the nest, the queen, workers and even drones (Cameron 1985) attend the brood, maintain and expand the nest (Sladen 1912; Free and Butler 1959). The Amazonian bumblebee, B. transversalis (Olivier) even forages for nest-building thatch materials along its established walking trails (Cameron and Whitfield 1996). It is well known that bumblebees build their nests in piles of stones, underground in cavities, and in buildings where they must walk and navigate through topographically simple to complex spaces. Thus, although multi-turn maze learning and ambulatory navigation (such as we have used) may seem unnatural, it may be important in bumblebees’ lives. The practical application of ambulatory navigation is exemplified in the technology that uses foraging bumblebees to deliver biological control agents against crop pests and pathogens from special, somewhat complex (one-way out and one-way in), walk-through dispensers on the hives (Kevan et al. 2008; Kevan et al. 2014).
References
Anderson JR (2000) Learning and memory an integrated approach (second edition). Wiley, Carnegie Mellon University
Baerends GP (1941) Fortpflanzungsverhalten und Orientierung der grabwespe Ammophila campestris Jur. Zietschrifte für Entomologie 84:81–275
Bernstein S, Bernstein RA (1969) Relationship between foraging efficiency and the size of the head and component. Brain Res 16:85–104
Bicker G, Spatz HC (1976) Maze-learning ability of Drosophila melanogaster. Nature 260:371
Cameron SA (1985) Brood care by male bumble bees. Proc Natl Acad Sci U S A 82:6371–6373
Cameron SA, Whitfield JB (1996) Use of walking trails by bees. Nature 379:125
Cartron L, Darmaillacq SA, Jozet-Alves C, Shashar N, Dickel L (2012) Cuttlefish rely on both polarized light and landmarks for orientation. Anim Cogn 15: 591–596
Chameron S, Schatz B, Pastergue-Ruiz I, Beugnon G, Collett TS (1998) The learning of a sequence of visual patterns by the ant Cataglyphis cursor. Proc R Soc Lond B Biol Sci 265:2309–2313
Chittka L (1998) Sensorimotor learning in bumblebees: long-term retention and reversal training. J Exp Biol 201:515–524
Chittka L, Thomson JD (1996) The ecology of bumble bees in T- mazes. In: Gőttingen Neurobiology Report. Elsner N, Schnitzler H. (eds). Thieme, Stuttgart, p 130
Chittka L, Thomson JD (1997) Sensori-motor learning and its relevance for task specialization in bumble bees. Behav Ecol Sociobiol 41:385–398
Chittka L, Kunze J, Geiger K (1995) The influences of landmarks on distance estimation of honeybees. Anim Behav 50:23–31
Collett TS (1992) Landmark learning and guidance in insects. Philos Trans R Soc Lond Ser B Biol Sci 337:295–303
Collett TS, Baron J (1995) Learnt sensori-motor mappings in honeybees: interpolation and its possible relevance to navigation. J Com Physiol Series A 177:287–298
Collett TS, Zeil J (1998) Place and landmarks: An arthropod perspective. In: Spatial Representation in Animals (ed. S. Healy), pp. 18–53. Oxford University Press, Oxford
Collett TS, Dillmann E, Giger A, Wehner R (1992) Visual landmarks and route following in desert ants. J Comp Physiol, Series A 170:435–442
Collett TS, Fry SN, Wehner R (1993) Sequence learning by honeybees. J Com Physiol Series A 172:693–706
Corbet SA, Kerslake CJC, Brown D, Morland NE (1984) Can bees select nectar-rich flowers in a patch? J Apic Res 23:234–247
Dale RHI (1988) Spatial memory in pigeons on a four-arm radial maze. Can J Psychol 42:78–83
Dyer AG, Whitney HM, Arnold SEJ, Glover BJ, Chittka L (2007) Mutations perturbing petal cell shape and anthocyanin synthesis influence bumblebee perception of Antirrhinum majus flower colour. Arthropod Plant Interact 1:45–55
Dyer AG, Spaethe J, Prack S (2008) Comparative psychophysics of bumblebee and honeybee colour discrimination and object detection. J Com Physio, Series A 194:617–627
Free JB (1987) Pheromones of social bees. Chapman and Hall, London, UK
Free JB, Butler CG (1959) Bumblebees. Collins, London
Gallistel CR (1990) The cognitive map. In: Gallistel CR (ed) The organisation of learning. MIT Press, Cambridge, pp 103–172
Goetsch W (1957) The Ants. The University of Michigan Press
Goulson D (2010) Bumblebees: behaviour, ecology, and conservation. Oxford University Press, Oxford
Goulson D, Stout JC, Langley J, Hughes WHO (2000) Identity and function of scent marks deposited by foraging bumblebees. J Chem Ecol 26:2897–2911
Han P, Niu C, Lei C, Cui J, Desneux N (2010) Use of an innovative T-tube maze assay and the proboscis extension response assay to assess sublethal effects of GM products and pesticides on learning capacity of the honey bee. Apis mellifera L Ecotoxicol 19:1612–1619
Hay DA (1975) Strain differences in maze-learning ability of Drosophila melanogaster. Nature 257:44–46
Healy S (1998) Spatial Representation in Animals. Oxford University Press, Oxford
Heinrich B (1976) Foraging specialisations of individual bumblebees. Ecol Monogr 46:105–128
Honzik CH (1936) The sensory basis of maze learning in rats. Com Psychol Monog 13:113
Janzen DH (1971) Euglossine bees as long distance pollinators of tropical plants. Science 171:203–205
Keasar T, Motro U, Shur Y, Shmida A (1996) Overnight memory retention of foraging skills by bumblebees is imperfect. Anim Behav 52:95–104
Kevan PG (1979) Floral colors in the high arctic with reference to insect–flower relations and pollination. Can J Bot 50:2289–2316
Kevan PG (1979) The spectral efficiency of phototaxis for some high Arctic Diptera. Arct Alp Res 11:349–352
Kevan PG, Lane MA (1985) Flower petal microtexture is a tactile cue for bees. Proc Natl Acad Sci U S A 80:4750–4752
Kevan PG, Kapongo JP, Al-Mazra’awi M, Shipp L (2008) Honey bees, bumble bees, and biocontrol. In: Bee Pollination in Agricultural Ecosystems (eds James, RR, Pitts-Singer TL). Oxford University Press. Pp. 65 – 79.
Kevan PG, Shipp L, Thomas VG (2014) Using pollinators for crop protection. Int Innov 125:9–11
Lehrer M, Horridge GA, Zhang SW, Gadagkar R (1995) Shape vision in bees: Innate preference for flower-like patterns. Philos Trans R Soc Lond B 347:123–137
Lihoreau M, Raine NE, Reynolds AM, Stelzer RJ, Lim KS, Smith AD, Osborne JL, Chittka L (2012) Radar tracking and motion-sensitive cameras on flowers reveal the development of pollinator multi-destination routes over large spatial scales. PLoS Biol 10(9), e1001392
Martin H (1965) Leistungen des topochemischen Sinnes bei der Honigbiene. Zeitsehrift fiir vergleichende Physiologie 50:254–292
McConnell JV (1966) The Worm Runner’s Digest. The Sciences 6(7): 19–23
Menzel R (1981) Achromatic vision in the honeybee at low light intensities. J Comp Physiol Series A 141:389–393
Menzel R (1990) Learning, memory and ‘cognition’ in honey bees. In: Kesner RP, Olten DS (eds) Neurobiology of Comparative Cognition. Erlbaum Inc., Hillsdale, NJ, pp 237–292
Mirwan HB, Kevan PG (2014) Problem solving by worker bumblebees Bombus impatiens (Hymenoptera: Apoidea). Anim Cogn. doi:10.1007/s10071-014-0737-0
Muller M, Wehner B (1988) Path integration in desert ants, Cataglyphis fortis. Neurobiology 85:5287–5290
Munn NL (1950) The role of sensory processes in maze behavior. In: Handbook of Psychological Research on the Rat, (Munn NL). Houghton Mifflin, Boston, pp 181–225
Ohashi K, Thomson JD (2012) Trapline foraging by bumble bees: VI. Behavioral Alter Under Speed-Accuracy Trade-offs Behav Ecol 24:182–189
Olton DS (1977) Spatial memory. Sci Am 236(6):82–98
Pick CG, Yanai J (1983) Eight arm maze for mice. Int J Neurosci 21:63–66
Platt SA, Holliday M, Drudge OW (1980) Discrimination learning of an instrumental response in individual Drosophila melanogaster. J Exp Psychol Anim Behav Process 6:301–311
Plowright CMS, Simonds VM, Butler MA (2006) How bumblebees first find flowers: Habituation of visual pattern preferences, spontaneous recovery, and dishabituation. Learn Motiv 37:66–78
Quinn WG, Harris WA, Benzer S (1974) Conditioned behavior in Drosophila melanogaster. Proc Natl Acad Sci U S A 71:708–712
Raine NE, Chittka L (2008) The correlation of learning speed and natural foraging success in bumblebees. Proc Royal Soci London Series B-Biolog Sci 275:803–808
Reynolds AM, Lihoreau M, Chittka L (2013) A simple iterative model accurately captures complex trapline formation by bumblebees accross spatial scales and flower arrangements. PLoS Comput Biol 9, e1002938
Ritter, FE & Schooler LJ (2002) The learning curve. In International encyclopedia ofthe social and behavioral sciences. 8602–8605. Amsterdam: Pergamon. http://www.iesbs.com/
Rosengren R (1971) Route fidelity, visual memory and recruitment behaviour in foraging wood ants of the genus Formica (Hymenoptera, Formicidae). Acta Zool Fenn 133:1–106
Saleh N, Scott AG, Bryning GP, Chittka L (2007) Distinguishing signals and cues: bumblebees use general footprints to generate adaptive behaviour at flowers and nest. Arthropod Plant Interact 1:119–127
SAS (Statistical Analaysis Software) (2014) www.sas.com/en_us/software/analytics/stat.html (accessed 11 September, 2014)
Schneirla TC (1929) Learning and orientation in ants. Comparative Psychology Monographs 6:1–143
Schneirla TC (1941) Social organization in insects, as related to individual function. Psychol Rev 48:465–486
Séguin FR, Plowright CMS (2008) Assessment of pattern preferences by flower-naïve bumblebees. Apidologie 39:215–224
Sladen FWL (1912) The humble-bee its life history and how to domesticate it. With description of all British species of Bombus and Psithyrus. Macmillan & Co., Ltd
Tierney AJ; Andrews K (2013) Spatial behavior in male and female crayfish (Orconectes rusticus): learning strategies and memory duration. Anim Cogn 16:23–34
Thomson JD, Slatkin M, Thomson BA (1997) Trapline foraging by bumblebees definition and detection from sequence data. Behav Ecol 8:199–210
Thorpe WH (1950) A note on detour experiment with Ammophila pubescens Curt. (Hymenoptera; Sphecidae). Behaviour 13:257–263
Tully T (1984) Drosophila learning: Behavior and biochemistry. Behav Genet 14:527–557
Vygotsky LS (1987) Thinking and speech. In L. S. Vygotsky, Collected works (1: pp. 39–285) (R. Rieber & A. Carton, Eds; N. Minick, Trans). New York: Plenum. (Original works published in 1934, 1960).
Wehner R (1992) Arthropods. In: Papi F (ed) Animal Homing. Chapman & Hall, London, pp 45–144
Wehner R, Menzel R (1990) Do insects have cognitive maps? Annu Rev Neurosci 13:403–414
Wehner R, Michel B, Antonsen P (1996) Visual navigation in insects: coupling of egocentric and geocentric information. J Exp Biol 199:129–140
Weiss K (1953) Versuche mit Bienen und Wespen in farbingen Labyrinthen. Zeitschifte für Tierpsychologie 10:29–44
Wilms J, Eltz T (2008) Foraging scent marks of bumblebees: footprint cues rather than pheromone signals. Naturwissenschaften 95:149–153
Wilson EO, Hölldobler B (1990) The ants. Springer, Berlin Heidelberg
Zhang SW, Bartsch K, Srinivasan MV (1996) Maze learning by honeybees. Neurobiol Learn Mem 66:267–282
Zhang SW, Lehrer M, Srinivasan MV (1998) Stimulus- conditioned sequence learning in honeybees. In: Proceedings of the 26th Goettingen Neurobiology Conference 1998 (eds Elsner N and Wehner R), 2: 519. Stuttgart: Thieme
Zhang SW, Lehrer M, Srinivasan MV (1999) Honeybee memory: navigation by associative grouping and recall of visual stimuli. Neurobiol Learn Mem 72:180–201
Zhang S, Mizutani A, Srinivasan MV (2000) Maze navigation by honeybees: learning path regularity. Learn Mem 7:363–374
Acknowledgments
We thank the Ministry of Higher Education, Libya, Canadian Bureau for International Education, Ottawa, Canada, and the Canadian Pollination Initiative (NSERC-CANPOLIN for which this is contribution No. 128) for funding. We thank Dr. Sarah Bates (NSERC-CANPOLIN, University of Guelph) for her help in preparing this paper. BioBest Canada, Leamington, Ontario kindly provided the colonies of Bombus impatiens for our study.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mirwan, H.B., Kevan, P.G. Maze Navigation and Route Memorization by Worker Bumblebees (Bombus impatiens (Cresson) (Hymenoptera: Apidae). J Insect Behav 28, 345–357 (2015). https://doi.org/10.1007/s10905-015-9507-3
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10905-015-9507-3