
Abstract
In the process of improvement of prosthetic devices, there have been efforts to develop satisfactorily working artificial hands but still lots of work is to be done to meet the accuracy and requirements of the human hand movement. The EMG signal has been most promising signal in development of artificial limbs. The present review paper gives the historical developments in three main sections. First part describes the EMG signal properties. Second part deals with the mathematical models developed till now for EMG signal analysis. In the third part different design approaches have been reviewed for artificial hand. First approach discussed here is on the body-powered terminal devices which are controlled by the user’s pull on the control cable to open the hand or hook and for the grip strength. Other being myoelectric controls type, an externally-powered system which uses electrical impulses, generated by contraction of the amputees own remaining muscles to operate a motor in a mechanical hand, hook or elbow. This paper presents a brief overview of above mentioned issues with regard to artificial hands.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In 218 BC during the Second Punic War the Roman general Marcus Sergius had his left hand amputated, but following the fitting of an iron replacement fashioned to hold his shield, he was able to return to battle [1]. In medieval times, knights would have prosthetic hands made by their armourers. According to Schulz et al. [2] in the United States 41,000 persons are registered who had an amputation of a hand or a complete arm. With the same frequency of occurrence (1 in 6,100) there would be 1,000,000 such persons worldwide. There are many advantages and disadvantages to each type of prosthetic system as described by Troy Farnsworth [3]. The main factors of the rejection of conventional prosthetic hands were: heavy weight, low functionality, robot-like movement.
Recent advances in technologies of signal processing and mathematical models have made it practical to develop advanced EMG detection and analysis techniques. In 2006 various mathematical techniques and Artificial Intelligence (AI) have received extensive attraction [4]. Mathematical models include wavelet transform, time-frequency approaches, Fourier transform, Wigner-Ville Distribution, statistical measures, and higher-order statistics.
The study of surface EMG is becoming more popular as its unique capabilities as described by Mobasser et al. [5] such as human–robot interaction, control of prosthetic arms, and human factor studies dynamics include the voluntary and nonvoluntary (reflex) excitation. They also mentioned that in many applications, such as analysis of sports activities, ergonomic design analysis, or teleoperation of robotic devices, the use of force sensors for the measurement of generated limb forces is impractical or inconvenient. Also the use of inexpensive and easily portable active electromyogram electrodes and position sensors would be advantageous in these applications compared to the use of force sensors, which are often very expensive and require bulky frames. Kundu et al. [6] had also designed and developed a human–robot interaction prototype of implantable 2 DOF inner skeleton robots (i.e., robotic elbow prosthesis) to assist the elbow flexion-extension motion and forearm supination-pronation motion. The robotic prosthesis was controlled based on the activation patterns of the muscles electromyogram signals by applying a fuzzy-neuro control method. The EMG controlled elbow prosthesis can be expected to be an artificial joint for the next generation.
As per Arora [7] to use myoelectric or electromyogram (EMG) signals as command and/or control signals, it is necessary to process the signal in order to extract the information. A number of methods for processing EMG signals have been used for the purpose of control of limb prosthesis segments of the EMG signal to preserve pattern structure. For the study of developments of prosthesis hand the main sections are EMG signal properties, mathematical model for explaining the surface EMG signal and the design approach for artificial hand. In the present study different types statements on EMG properties and models based on different mathematical facts along with their end equations is recorded. Also, the study on types of controlling methods for artificial hand is described as one form being body-powered terminal devices and other being myoelectric controls type.
2 EMG signal properties
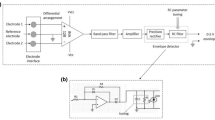
A myoelectric signal or electromyography (EMG), also called a motor action potential, is an electrical impulse that produces contraction of muscle fibers in the body. Myoelectric signals are detected by placing three electrodes on the skin. Normally the EMG is acquired in differential mode. Two electrodes are positioned so there is a voltage between them when a myoelectric signal occurs. The third electrode is placed in a neutral area, and its output is used to cancel the noise that can otherwise interfere with the signals from the other two electrodes. Myoelectric signals have frequencies ranging from a few hertz to about 300 Hz, and voltages ranging from approximately 10 μV–1 mV. A typical EMG pattern is shown in Fig. 1.

Typical EMG pattern
An EMG property is very important for understanding human body movements. Several investigators has given their opinions relating to EMG properties as shown in Table 1.
3 Mathematical models of EMG
Mathematical modeling of the surface electromyography (EMG) signal is a tool to explore proper methods of muscle activation patterns. It gives the understanding how different physiological and physical factors alter the signal detected at the skin surface.
3.1 EMG model as low pass filter
Agarwal and Gottlieb [12] described that the EMG of a single motor unit can be defined as function of time by a convolution integral. \( e(t) = \int\limits_{0}^{t} {h(t - } \tau )p(\tau )d\tau , \) where p (τ) is series of unit impulses or Dirac delta functions which passes through a filter whose impulse response is h (t) as in Fig. 2. The time function h (t) describes the shape of a single motor unit action potential. The Fourier Transform (FT) of equation is E (jω) = H (jω) P (jω), where H (jω) is the FT of the impulse response and P (jω) is the FT of the random pulse train.

EMG for a single motor unit model as low pass filter
The FT for a train of such pulses from a single unit of this shape is given by:
3.2 Non-stationary model for the EMG
According to Shwedyk et al. [13] model, neural pulse train inputs were considered which passed through linear, time invariant systems that represented the motor unit action potential (MUAP). Figure 3 shows the EMG signal generation model. The outputs were then summed to produce the EMG. It was assumed that in the production of muscle force, the controlled parameter was the number of active motor units, n (t). The model then showed that the EMG can be represented as an amplitude modulation process of the form EMG = [K n (t)]1/2 w (t) with the stochastic process, w (t), having the spectral and probability characteristics of the EMG during a constant contraction.

Model for EMG signal generation
3.3 Pseudo-periodic model for myoelectric signal
Helal and Duchene [14] represented that SMES as an infinite train of bursts of activity. Assuming linearity between MUAP’s and the detection site, each burst results from the summation of N MUAP’s filtered through low-pass functions:
where, T is the activation period of the muscle, hu (t) are filter functions between MU’S and the detection site, AMUAP(t) is the average MUAP assumed identical for the N MU’S, \( \xi _{n}^{u} \) are random delays of MUAP’s in each burst, n is the burst index, u is the MU index. SMES (t) is a process of infinite energy. Final result shows that the filter function between φAMUAP(f) and φSMES(f) consists of two characteristic parts, denoted as W(f) and B (f).
3.4 Auto-regression model
Knox et al. [15] stated that auto-regression modeling has become a common technique for parameterizing linear systems/signals. The model is based on the linear difference equation for the discrete time signal,
where the input u (n) is assumed to be white noise. The coefficients, ak are estimated by a least squares minimization of the estimation error, e (n).
3.5 Integral pulse frequency and amplitude modulation, IPFAM model
Zhang et al. [16] developed a basic IPFAM model of EMG signals during locomotion. The IPFAM model has three main elements: the PFM, the PAM, and the linear system. The PFM describes the variations in the EMG caused by changes in the nerve firing rates, the PAM describes the association of the EMG amplitude with variations in muscular force, and the linear system, p(t), represents the compound motor unit action potential (CMUAP) including the effects of propagation dispersion and tissue filtering. In the IPFAM model, the potential rises until a pre-determined threshold is reached, which causes an action potential or event to occur. With the frequency modulating signal 1 + m1cos(2πfpt + θ) and the amplitude modulating signal Ao + Ascos(2πfst + γ), where Ao, is the DC-level, ml is the modulation depth, As is the amplitude, f p is the PFM modulating frequency, and f s , is the PAM modulating frequency, the expression of the IPFAM can be derived as: \( E(f) = \frac{{A_{o} }}{{T_{o} }}A(f) + \frac{{A_{o} }}{{2T_{o} }}\{ B(f) + C(f)\} , \) where A (f), B (f) and C (f) are the three mentioned functions.
3.6 EMG to force model
Figure 4 shows the block diagram of EMG to force model proposed by Anctil and Slawnych [17]. This model consists of three basic blocks namely the signal processing block, the moment/angle relation and the moment/angular velocity relation. In the signal processing block, the RMS value of the recorded SEMG was calculated. The moment/angle block contains the force/length properties of the individual muscles. These properties were derived from static contractions of the muscles at different angles and loads. The last block consists of two sub blocks: the moment to force conversion and the force/angular velocity relation which describes the force/velocity properties of the muscles. Data were collected under static and dynamic both conditions. In the static case, the subject holds the applied load with a constant elbow angle and the angle was varied from 40 to 130° in intervals of 10°. These measurements were used to determine the moment/angle properties of the muscles. In case of dynamic, the subject moved the elbow at approximately constant velocity from 40° to 130° (flexion) and from 130° to 40° (extension) for different loads.

EMG to force model block diagram
3.7 Dipole model
Anctil and Slawnych [17] introduces an efficient new method for modeling surface electrode potentials in which action potential is represented in terms of two oppositely directed dipoles propagating down the fiber. In a dipole model, the current is assumed to be concentrated at two different points along the fiber. Potential φ recorded by a point electrode in response to a source current I located at a distance R Using the definition of a partial differential, ϕ2 (t) can be expressed as follows:
σ is the conductivity of the medium. The potential recorded by a surface electrode in terms of a spatial integration of the potential function with respect to the electrode surface A:
Figure 5 shows the comparison of the potentials derived from a single muscle fiber the surface electrode in terms of a series of point electrodes.

Comparison of the potentials derived from a single muscle fiber
4 Design and developments of electronic prosthetic arm
There has been lot of efforts worldwide to improve the activities in the functional range of the prosthetic hand. The following section gives the brief idea about the classification of prosthetic hand and major developments in each category.
4.1 Design classifications
Tomovic and Boni [18] mentioned that Prosthetic arm can be classified depending upon controlling techniques. The two most common prosthetic systems are body-powered and myoelectric designs. Figure 6 shows the symbolic representation of prosthesis (a) internally powered and controlled (b) externally powered prosthesis and (c) prosthesis externally powered and both externally and internally controlled. Here P and C stand for Power and Control elements, respectively.

Symbolic representation of prosthesis
4.2 Body-powered designs
Body-powered terminal devices (hooks, hands, etc.) come in various configurations which are controlled by the user’s pull on the control cable to open the hand or hook, and the grip strength is limited by the number of rubber bands on the hook or the spring tension in the hand. Figure 7 shows flow chart of the controlling strategy.

Flowchart of control strategy
Sunton and Sathaporn [19] of Thailand developed the design of pneumatic controlled movement controlled by a foot switch. This test was performed on an amputee wearing this artificial arm and performed simple tasks such as picking up objects, drinking water. Kuba et al. [20] described the flexible grasping motion control for a hand with two fingers. For this control the reference grasping force was decided in advance for the operation. The way to extend the grasping control by including the operator to the control loop was explained. Here study carried to know how to interface human and an artificial hand, based on human being property. Pfeiffer [21] established that the hand should be as large as a human hand. For grasping, three fingers and for re-grasping, four fingers are needed. The hand was mounted on a PUMA 560 robot. Each finger should possess three degrees of freedom. The fingertip is able to generate a normal force of 30 N, which allows the fingers to lift 1 kg with a static friction. Opening and closing a finger takes place in at least 0.5 s. Each degree of freedom is driven by a small piston-cylinder system with 10-mm internal diameter where one side of the piston is pushed by oil pressure and the other side by a spring. Lee and Shimoyama [22] described a method and a process for developing a soft artificial hand similar to a real human hand and its small- size- soft actuator. For the soft actuator, a pneumatic artificial muscle was used. The pneumatic artificial muscle allows the artificial hand not only to move softly and powerfully by pneumatic power but also works as a sensor.
Schulz et al. [2] presented a very lightweight artificial hand driven by a new type of powerful small size flexible fluidic actuator. The actuators are completely integrated in the fingers which made possible the design of a very compact and lightweight hand that can either be used as a prosthetic hand or as a humanoid robot hand. Beck et al. [23] developed a position and force control for robotic systems. This article presented a joint controller for an anthropomorphic robot hand driven by flexible fluidic actuators. These flexible and compact actuators are integrated directly into the finger joints, where they can be driven either pneumatically or hydraulically.
In almost all cases the harness and cable system can be both the best and worst aspect of a body-powered system. Negative aspects develop as the same pressure may create discomfort and contribute to long-term nerve compression and overuse problems. Another important consideration is that body-powered designs are less expensive.
4.3 Externally-powered systems
Myoelectric control is the most common type of externally-powered systems. A myoelectrically-controlled prosthesis uses electrical impulses, generated by contraction of the amputee’s own remaining muscles, to operate a motor in a mechanical hand, hook or elbow. Most myoelectric systems provide proportional control of the speed and grip strength of the hand or other electric terminal devices (electric hook or work device) based on the strength of the muscle contraction of the wearer.
Tomovic and Boni [18] described the improvements that can be obtained in the design of an artificial limb. This work exploited all the possibilities of the principles. An important improvement would be to divide the sensitivity elements into layers. Thus a new dimension is added to the artificial hand. Graupe et al. [24] described a prosthesis control system that is based on microprocessor hardware where control of an artificial limb for above-elbow amputees is accomplished. The design employs time series identification techniques for parameter discrimination. System involves one set of electrodes for discriminating and controlling five limb functions. The system feeds a motor control and actuation unit identical to that of the toe-controlled system of which is presently used by a bilateral above-elbow amputee. Ray and Guha [25] stated that most of the theoretical studies relating the surface electromyogram to muscular force suggested that the amplitude of the e.m.g. should increase proportionately with the square root of the tension. However, direct experiments have shown a linear relationship.
Bergamasco and Scattareggia Marchese [26] presented an article for the development of a new three-fingered poly-articulated myoelectric prosthesis. The prosthetic hand is equipped with position, force, and slip sensors which allows maintaining a stable grasping of the object without affecting the user attention. Force sensors at the level of the fingertips as well as palm sensors have been integrated in the structure. Okuno et al. [27] developed the new type myoelectrically controlled prosthetic hand which simulated the dynamic properties of the muscle and stretch reflex. The prosthetic hand consisted of the processing units of surface EMG signals, the digital servo system of DC motor giving the one-degree of freedom mechanical hand.
Fermo et al. [28] presented the development of a sensor for detecting human muscle contraction, which captures myoelectric signals (EMG), in order to control a myoelectric prosthesis of superior limb. The analysis of the signal is carried out through software running in a microcontroller that decides how to open or close the artificial hand. New functions (for example, if the hand is open, close, and semi-close, etc.) can also be added with a simple alteration in the microcontroller program, without any hardware alterations. Morita et al. [29] presented paper having a new approach for controlling the prosthetic hand-torque control of each joint. The joint torque is estimated from EMG signals using artificial neural network. The learning system is based on feedback error learning scheme. Yukio et al. [30] developed electrical prosthetic hands for patients both in size and in appearance those fit to their age and body shape. With such patients who have real hand, it is important to confirm the size and appearance of electrical prosthetic hands to their healthy hands. Zajdlik [31] introduces the first prototype of a five-fingered prosthetic hand and the first attempt to control this mechanism. The mechanism has twenty degrees of freedom and is actuated by only three motors. In the control unit inputs (from EMG) for a feed forward back propagation by analysis as described neural network used to recognize the type of grasp.
4.4 Concatenate designs
Hybrid prostheses combine body-powered and electrically-powered components. For example, a terminal device may be myoelectrically controlled while the elbow unit is body-powered. Many combinations of systems are used to optimize individual functional performance. Finat and Lopez-Coronado [32] showed a hybrid method for adapting a three fingered dexterous and compliant artificial hand, so as to describe preconfiguration before grasping some specified rigid object. This category can also be specially designed for one specific task or activity such as devices for tools, cooking, fishing, skiing, baseball, hockey, archery and billiards, as well as for musical instruments. Amputees are frequently choosing to utilize more than one type of prosthesis as part of their daily life. For example, a person may wear a myoelectric system for most activities, or utilize a body-powered system for heavy-duty or wet tasks.
4.5 Proposed design
In this section, an innovative design of the externally powered hand prosthesis has been discussed. Arora [33, 34] discussed that the main aim of this design is to improve the functionality of the prosthesis without putting additional actuator. The main stress of the structure design has been the realization of the stated objectives. It can be mentioned that, if more functions can be realized with the less number of the actuators, the objective of the less weight and good functionality can be achieved without compromising the other parameters such as mechanical strength etc. It has been observed that to accommodate the precision and the power grip independent movement of the thumb joint and the finger joint is required. The precision grasp is achieved when joints of both the thumb and finger flex, and to realize the power grip the fingers are made to oppose the palmar surface, while thumb lies either in the same plane as the palm or rolls over the fingers. Normally available hand prosthesis, with single degree of freedom, is capable of performing only precision grasp. If the finger joint and thumb joint can be operated by a single actuator to achieve the power and precision grasp, the weight of the prosthesis will be reduced greatly with improved functionality.
In the following lines the concept of achieving the power and precision grasp with single actuator has been discussed. The mechanism of linkages can be used to get the desired movement from the driver actuator. The linkages allow any combination of reciprocation or oscillation into reciprocation or oscillation. Figure 8 shows that the two joints, one for fingers and other for thumb, are connected to the same motor shaft. There four joints in the mechanism around which both the links connected to it can move. The mechanism is shown in the extreme position of precision grasp, where the tip of index finger touches the tip of the thumb. From this position, the thumb will always move outside irrespective of the direction of the motor movement. If motor is moved in the clockwise direction, the joint1 and joint2 will move downwards, thus the fingers will move upwards and thumb will move outward. So this movement will be equivalent to release or the opening of the hand. In case motor moves in anti-clockwise direction then fingers move downwards as both the joints (1 and 2) move upwards. The thumb again moves downwards and the movement is equivalent to the power grip. In this particular movement the fingers face the palm and thumb does not take part in the grasp operation. Thus it is clear that the both types of grip can be achieved by single motor. This concept leads to decrease in number of the actuators to be used to achieve the power and precision grasp with the prosthesis.

Mechanism for the operation of prosthesis
5 Conclusion
The main challenges for the design of physical device are good mechanical strength, less weight, sufficient grip force, low power consumption, computational capability compatible to control scheme and high speed of operation. Due attention must be paid to design and selection of all the components to achieve the design objectives. The design of structure is one area where an imaginative design may reduce lot of stress from weight constraint. The grip force and power consumption can be taken care by the proper choice of the actuators. The speed of operation and computational capability is to be taken care off by the proper selection of microcomputer and other electronic components. The ideal requirements are material for mechanical structure having mechanical strength, flexibility and weight like bone, the controller having computational capability, speed and adaptability like brain, actuator having high torque and flexibility like muscles, and the feedback elements having sensing capability like skin.
EMG is a relatively new technology. It has a definite potential to be used as control signal for multifunction prosthesis. There is need to draw correlation between the physiological, physical factors and the EMG signal. The exact details of the recent developments are needed to be acknowledged and consolidated at one place. This research paper gives the different viewpoints of researchers from 60’s till now, while stating the properties, computing mathematical model and designing the surface EMG controlled hand. Here it is kept in consideration that the researcher gets enough literature review. Coming area of human machine interface is believed to be based on EMG-technologies. A vast contribution is need, which this paper is an attempt as motivation to new researchers.
References
P. Kyberd, The intelligent hand. IEE Rev. 46(5), 31–35 (2000)
S. Schulz, C. Pylatiuk, G. Bretthauer, A new ultralight anthropomorphic hand, in Proceedings of IEEE International Conference on Robotics and Automation, ICRA 2001, vol. 3 pp. 2437–2441
T. Farnsworth, The call to arms. BSME, CP, FAAOP, Active Living Magazine, 3 Aug 2004
M.B.I. Reaz, M.S. Hussain, F. Mohd-Yasin, Techniques of EMG signal analysis: detection, processing, classification and applications. Biol. Proc. Online 8(1), 11–35 (2006). doi:10.1251/bpo115
F. Mobasser, J.M. Eklund, K. Hashtrudi-Zaad, Estimation of elbow-induced wrist force with EMG signals using fast orthogonal search. IEEE Trans. Biomed. Eng. 54(4), 683–693 (2007)
S.K. Kundu, K. Kiguchi, EMG controlled robotic elbow prosthesis as an inner skeleton power assist system, in Proceedings of the 4th IEEE International Conference on Mechatronics, ICM2007, 8–10 May 2007, pp. 1–6
A.S. Arora, Modified adaptive resonance theory based control strategy for EMG operated prosthesis for below-elbow amputee. J. Med. Eng. Technol. 31(3), 191–201 (2007)
K. Kiguchi, T. Tanaka, T, Fukuda, Neuro-Fuzzy Control of a Robotic Exoskeleton with EMG Signals. IEEE T. Fuzzy Syst. 12(4), 481–490 (2003)
H.-P. Huang, C.N. Chen, Development of a myoelectric discrimination system for a multi-degree prosthetic hand, in Proceedings of the 1999 IEEE International Conference on Robotics & Automation Detroit, Michigan, May 1999, p. 2392
C.J. De Luca, Physiology and mathematics of myoelectric signals. IEEE Trans. Biomed. Eng. BME-26(6), 313–325 (1979). doi:10.1109/TBME.1979.326534
D. Graupe, Functional separation of EMG signals via ARMA identification. IEEE Trans. Syst. Man Cybern. SMC-5, 252–259 (1975)
G.C. Agarwal, G.L. Gottlieb, An analysis of the electromyogram by fourier, simulation and experimental techniques. IEEE Trans. Biomed. Eng. BME-22(3), 225–229 (1975)
E. Shwedyk, R. Balasubramanian, R.N. Scott, A nonstationary model for the electromyogram. IEEE Trans. Biomed. Eng. BME-24(5), 417–424 (1977)
J.N. Helal, J. Duchene, A pseudoperiodic model for myoelectric signal during dynamic exercise. IEEE Trans. Biomed. Eng. 36(11), 1092–1097 (1989)
R.R. Knox, D.H. Brooks, E. Manolakos, S. Markogiannakis, Time-series based features for EMG pattern recognition: preliminary results, in Proceedings of the 1993 IEEE Nineteenth Annual Northeast Bioengineering Conference, 18–19 March 1993, pp. 1–2
Y.T. Zhang, W. Herzog, M.M. Liu, A mathematical model of myoelectric signals obtained during locomotion, in Proceedings of the IEEE 17th Annual Conference on Engineering in Medicine and Biology Society, vol. 2, 20–23 Sept 1995, pp. 1403–1404
B. Anctil, M.P. Slawnych, An efficient method for modeling EMG potentials as recorded using surface electrodes, in Proceedings of the 20th Annual International Conference of the IEEE on Engineering in Medicine and Biology Society, vol. 5, 29 Oct–1 Nov 1998, pp. 2613–2615
R. Tomovic, G. Boni, An adaptive artificial hand. IRE Trans. Automat. Contr. AC-7(3), 3–10 (1962)
S. Wongsiri, S. Laksanacharoen, Design and construction of an artificial limb driven by artificial muscles for amputees, in Proceedings of the 2003 PSU-UNS International Conference on Energy and the Environment, Prince of Songkla University, Hat Yai, Songkla, Thailand, Dec 11–12, 2003
Y. Kuba, M. Wada, H. Endo, An interfacing method between an artificial hand and human, in Proceedings of the IEEE International Workshop on Robot and Human Communication, 1–3 Sept 1992, pp. 194–198
F. Pfeiffer, Grasping with hydraulic fingers—an example of mechatronics. IEEE/ASME Trans. Mechatron. 1(2), 158–167 (1996)
Y.K. Lee, I. Shimoyama, A skeletal framework artificial hand actuated by pneumatic artificial muscles, in Proceedings of the 1999 IEEE International Conference on Robotics & Automation, Detroit, Michigan, May 1999, p. 926
S. Beck, R. Mikut, A. Lehmann, G. Bretthauer, Model-based control and object contact detection for a fluidic actuated robotic hand, in Proceedings of the 42nd IEEE Conference on Decision and Control, Maui, Hawaii, USA, December 2003, p. 6369
D. Graupe, J. Magnussen, A. Beex, A microprocessor system for multifunctional control of upper-limb prostheses via myoelectric signal identification. IEEE Trans. Automat. Contr. 23(4), 538–544 (1978)
G.C. Ray, S.K. Guha, Relationship between the surface-EMG and muscular force. Med. Biol. Eng. Comput. (Great Britain) 21(5), 579 (1983)
M. Bergamasco, M.S. Scattareggia, The mechanical design of the MARCUS prosthetic hand. in Proceedings of the 4th IEEE International Workshop on Robot and Human Communication, RO-MAN'95 TOKYO, 5–7 July 1995, pp. 95–100
R. Okuno, M. Yoshida, K. Akazawa, Development of biomimetic prosthetic hand controlled by electromyogram, in Proceedings of the 4th International Workshop on Advanced Motion Control, vol. 1, 18–21 March 1996, pp. 103–108
C.P. Fermo, C.V. De Vincenzo, T.F. Bastos-Filho, V.I. Dynnikov, Development of an adaptive framework for the control of upper limb myoelectric prosthesis, 2000, in Proceedings of the 22nd Annual International Conference of the IEEE on Engineering in Medicine and Biology Society, vol. 4, 23–28 July 2000, pp. 2402–2405. doi:10.1109/IEMBS.2000.901282
S. Morita, T. Kondo, K. Ito, Estimation of forearm movement from EMG signal and application to prosthetic hand control. in Proceedings of the 2001 IEEE International Conference on Robotics & Automation, Seoul, Korea, 21–26 May 2001, p. 3692
Y. Saito, A. Ogawa, H. Negoto, K. Ohnishi, Development of intelligent prosthetic hand adapted to age and body shape, in Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics, Chicago, IL, USA, 28 June–1 July 2005, p. 384
J. Zajdlik, The preliminary design and motion control of a five-fingered prosthetic hand. 10th international conference on intelligent engineering systems, INES 2006, p. 202
J. Finat, J. Lopez-Coronado, A hybrid model for the hand preconfiguration in rehabilitation grasping tasks, 1998, in Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, vol. 4, 11–14 Oct 1998, pp. 3448–3453. doi:10.1109/ICSMC.1998.726551
A.S. Arora, Development of control strategies for EMG based control of multifunction prosthetic hand. Ph.D. Thesis, Indian Institute of Technology, Roorkee, 2002
http://www.ottobockus.com/PRODUCTS/UPPER_LIMB_PROSTHETICS/myoelectric_hands.asp
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ryait, H.S., Arora, A.S. & Agarwal, R. Study of issues in the development of surface EMG controlled human hand. J Mater Sci: Mater Med 20 (Suppl 1), 107–114 (2009). https://doi.org/10.1007/s10856-008-3492-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10856-008-3492-4