
Abstract
A quantum entanglement’s composite system does not display separable states and a single constituent cannot be fully described without considering the other states. We introduce quantum entanglement on a hypersphere - which is a 4D space undetectable by observers living in a 3D world -, derived from signals originating on the surface of an ordinary 3D sphere. From the far-flung branch of algebraic topology, the Borsuk-Ulam theorem states that, when a pair of opposite (antipodal) points on a hypersphere are projected onto the surface of 3D sphere, the projections have matching description. In touch with this theorem, we show that a separable state can be achieved for each of the entangled particles, just by embedding them in a higher dimensional space. We view quantum entanglement as the simultaneous activation of signals in a 3D space mapped into a hypersphere. By showing that the particles are entangled at the 3D level and un-entangled at the 4D hypersphere level, we achieved a composite system in which each local constituent is equipped with a pure state. We anticipate this new view of quantum entanglement leading to what are known as qubit information systems.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Quantum entanglement is a widely accepted, experimentally verified physical phenomenon occurring when a system of particles interact as a whole, in a way such that the quantum state of each particle cannot be described independently and their physical properties - such as position or spin - are instantly correlated [1]. When a composite system is entangled, it is impossible to separate its components and attribute to each one a definite pure state. Quantum state cannot be factored as a product of states of its local constituents (e.g. individual particles) and one constituent cannot be fully described without considering the other(s) [2–4]. It gives rise to a paradoxical effect: it seems that one particle of an entangled pair “knows” what measurement has been randomly performed on the other, even though such information cannot be communicated between them. While a composite system is always expressible as a sum of products of states of local constituents, when the system is entangled the sum necessarily has more than one term. This means that we cannot recognize cause/effect relationships. In such a framework, the Borsuk-Ulam theorem (BUT) from topology comes into play, leading to a game-changing result: the hypersphere quantum information theorem. The BUT states that every continuous map from a n-sphere (denoted Sn) to a n-Euclidean space must identify on Sn a pair of antipodal points directly opposite each other [5] (Fig. 1). To make an example, the case n =1 says that there always exist a pair of opposite points on the earth’s equator with the same temperature. An 3-sphere (called a hypersphere) is a generalization of the circle: mathematically, it is a simply connected manifold of constant, positive curvature that maps to a 3-dimensional Euclidean space [6]. When we examine a system equipped with quantum entanglement, we usually do not take into account a noteworthy feature: our measurements are on a S2 manifold, which is a 3D world.

The Borsuk-Ulam theorem for different values of Sn. Two antipodal points in Sn project to a single point in Rn, and vice versa. Remind that every Sn is embedded in a n + 1-ball, and thus every Sn is one-dimension higher than the corresponding Rn
2 Theory
Our basic approach is to map entangled system signals in S2 to S3. Notice that our S2 measurements illustrate just the “hints” of such an S3 activity analogous to way one recognizes an object from its shadow projected on a screen. The spheres equipped with n>2 are not detectable in the usual spatial 3-dimensions and are thus challenging to assess. If we look just at mappings on the surface of S3 system, we find the puzzling picture of quantum entanglement, apparently incompatible with our perceptions. BUT also states that every continuous function maps each pair of antipodal n-sphere surface points into surface vectors on a Euclidean n-space. This means that entanglement (i.e., a system not formed by two product states) can be seen as just 3D space surface points that have a corresponding pair of S3 antipodal points (pure states!). We demonstrate that each of the two entangled particles may have a pure state, provided they are embedded in a dimension higher: the system is entangled at the S2 level, but un-entangled at the S3 hypersphere level. We thus obtain a 4D composite system, factored as a product of states of its local constituents.
In keeping with recent work on quantum computation, quantum distillation and quantum information science [1, 2], we propose an approach to entanglement which provides a new source of quantum information, by mapping entangled quanta on a 3D surface to unentangled quanta on the surface of a hypersphere. The old adage that opposites are attracted to each other, applies here. This analogy, applied to the problem of extracting information from entangled quanta, gets it impetus from BUT, a discovery made by Borsuk [5] in 1933. If we start with entangled quanta with antipodal locations on the surface of a sphere, then a continuous mapping of surface particles to a higher level quanta on the surface of a hypersphere results in matching quantum information derived from the entangled quanta. This information is reversible for invertible continuous mappings of antipodal surface quanta into the surface of a hypersphere. Schrödinger [7]17 observed that we must gather information about the entangled quanta to achieve disentanglement. His work provides yet another solution to the disentanglement problem. In this instance, our proposed continuous mapping of surface quanta to hypersphere surface quanta is analogous to what Schrödinger calls a programme of observations as a means of finding representatives of entangled quanta. In our case, the quantum-mapping images are representatives of entangled quanta, with the added bonus that the images provide matching signatures of the entangled surface quanta.
3 Mathematical Model and Equations
The basic approach is to think in terms of a homotopic mapping of a 3D shape produced by one continuous function that can be deformed into another shape by a second continuous function. To do this, we first consider the BUT theorem. An n-dimensional Euclidean vector space is denoted by R n. Thus, for example, a feature vector x∈R n models the description of a surface signal. BUT states that every continuous map f:S n→R n must identify a pair of antipodal points – diametrically opposite points on an n-sphere [8–11]. Points are antipodal, provided they are diametrically opposite [9]. Examples of antipodal points are the endpoints of a line segment, or opposite points along the circumference of a circle, or poles of a sphere.

We will follow the terminology displayed in BOX. The notation S n designates an n-sphere. We have the following n-spheres, starting with the perimeter of a circle (this is S 1) and advancing to S 3, which is the smallest hypersphere:
-
1-sphere
\(S^{1 } : {{x_{1}^{2}}} + {{x_{2}^{2}}} \to R^{2}\) (circle perimeter),
-
2-sphere
S 2 : \({{x_{1}^{2}}} + {{x_{2}^{2}}} + {{x_{3}^{2}}} \to R^{2}\) (surface),
-
3-sphere
S 3: \({x_{1}^{2}} + {x_{2}^{2}} + x_{3}^{2+}{x_{4}^{2}} \to R^{2}\) (smallest hypersphere surface), ...,
-
n-sphere
S n: \({x_{1}^{2}} + {x_{2}^{2}} + x_{3}^{2+}... + {{x_{n}^{2}}}\to R^{2}\)
If we view the phase space of quantum entanglement as a n-sphere and the feature space for signals as a finite-dimensional Euclidean topological space, then BUT tells us that for each description f(x) of a signal x, we can expect to find an antipodal feature vector f(−x)that describes a signal on the opposite (antipodal) to x with a matching description (Fig. 2).

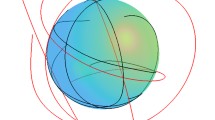
Spontaneous parametric down-conversion, the commonest method used to create quantum entanglement, may generate a pair of photons entangled in polarisation [23, 24]. When a strong laser beam is conveyed through a nonlinear crystal, the most of photons continue straight through the crystal, while a small amount are splitted into photon pairs. The two photons may share the same polarization (type I correlation), or may be equipped with mutually perpendicular polarizations (type II correlation). In the latter case, displayed in Figure, we are in front of a pair of horizontally- and vertically- polarized entangled photons (A and B). These type II photons display trajectories, constrained within the two cones, which may exist simultaneously in the lines where the cones intersect. The two cones represent sources of pairs of photons that become entangled. We embedded the two points A and B (visually represented by blobs with dark centers), corresponding to the entangled particles of Fig. 1A, in a circumference centred in the laser beam. Such a circumference is one of the circles surrounding the sphere Sn. For the Borsuk-Ulam theorem, the two antipodal points A and B are described by the same function, provided they are embedded in Sn. The function stands for the physical properties corresponding to the quantum entanglement of the two particles A and B: in this framework, it becomes clear that the two points are strictly correlated. Note that the figure is just an oversimplification: the Sn sphere, which is actually a 3-sphere, is depicted as a simple 2-sphere, to make it easier to recognize
Let X denote a nonempty set of points on the surface of a 3D system. We assume that that is a topological space, which means that the unions and intersections of the subsets of x belong to X. Let X, Y be topological spaces. Recall that a function or map f:X→Y on a set X to a set Y is a subset X×Y, so that for each x∈X there is a unique y∈Y such that (x, y)∈f (usually written y = f(x)). The mapping f is defined by a rule that tells us how to find f(x). A mapping f:X→Y is continuous, provided \(A \subset Y\) is open, then the inverse \(f^{-1}(A)\subset X\) is also open [8, 11, 12]14,19,22. In this view of continuous mappings from a signals topological space X on the surface of a 3-sphere to the signal feature space R n, we can consider not just one signal feature vector x∈R n, but also mappings from X to a set of signal feature vectors f(X). This expanded view of signals has interest, since every connected set of feature vectors f(X) has a shape, which has direct bearing on the study of the shapes of space [13]. This means that signal shapes (in our case, mappings of sets of entangled particles) can be compared.
A consideration of f(X) (set of region signal descriptions entangled on a n-sphere) instead of f(x) (description of a single signal x) leads to a region-based view of signals, which arises naturally in terms of a comparison of shapes produced by different mappings from X (object space) to the feature space R n.
Let f, g:X→Y be continuous mappings from X to Y . The continuous map H:X×[0,1]→Y is defined by H(x,0) = f(x), H(x,1) = g(x), for every x∈X.
The mapping H is a homotopy [6, 14, 15], if there is a continuous transformation (called a deformation) from f to g. The continuous maps f, g are called homotopic maps, provided f(X) continuously deforms into g(X) (denoted by f(X)→g(X)). The sets of points f(X), g(X) are called shapes [8, 13].
The mapping H:X×[0,1]→R n, where H(X,0) and H(X,1) are homotopic, provided f(X) and g(X) have the same shape. That is, f(X) and g(X) are homotopic, if: ∥f(X)−g(X)∥<∥f(X)∥, for all x∈X.
4 Results and Discussion
Once achieved an association between the geometric notion of shape and homotopies, we introduce the following theorem:
Hypersphere Quantum Information Theorem
Let {|f(q(−A))〉} be a set of pathwise-connected qubit vectors on the surface of a hypersphere S3 in a normed linear space. The shape {|f(q(−A))〉} induced by the set of path-connected qubit state vectors can be deformed onto the shape {|f(q(A))〉} on a 3-sphere.
Proof
The proof is an immediate consequence of the Borsuk-Ulam Theorem. From BUT, each |f(q(A))〉=|f(q(−A))〉. Hence the shape {|f(q(−A))〉} deforms into the shape {|f(q(A))〉}.
Next, we investigate quantum entanglement on an n-Sphere embedded in a normed linear space X. Let E(A,B) denote the entanglement of vectors A,B on a normed linear space. Conventional entanglement is represented by:
Let S 1∈X be the circumference (perimeter) of a 1-sphere circle, A,−A∈Xthe quanta (vectors) on X and, finally, let A,−A be antipodal quanta on X. Let q : X→R be a mapping from a quantum A on X into the reals R and q(A), q(B) ∈R be real-valued antipodal entangled signals. In addition, let Q be a set of signal values originating from points A, B on the perimeter X of a 1-sphere circle. □
Remark 1
For A in Sn, the point A (also called a state) and the signal q(A) defines a vector (A, q(A)) on the surface of a 2-sphere. That is, Sq(A) 〉A ∈ S2. Signals on an S2 surface are then mapped to feature vectors f(q(A)) ∈ S3 that describe the signals q(A). From this, we can rewrite the quantum entanglement model in the following way. Let E(A, −A) denote the quantum entanglement of states A, −A, defined by:
Let Q be a set of signals on the surface of a 2-sphere, Y be a set of feature vectors S3 on the surface of a 4-dimensional hypersphere and f : Q → Y be a continuous mapping on the set of signals Q into Y. Let q, −q ∈ Q be antipodal quantum signals.
Remark 2
f(q(A)) defines a feature vector (A, q(A), f(q(A))) on the surface of a hypersphere S3. That is, |f(q(A)) 〉q(A) ∈ S3. Each qubit provides information about a signal q(A). In addition, the Borsuk-Ulam Theorem predicts the presence of antipodal qubits f(q(A)), f(q(−A)), such that the information provided by f(q(−A)) matches the information provided by f(q(A)). From this, we obtain a new form of entanglement, at the information level on a hypersphere. Let E(q(A), q(−A)) denote the quantum entanglement of states q(A), q(−A), defined by:
Let the qubit system Y = {Sf(q(A)) 〉} be a set of pathwise-connected qubit vectors on the surface of a hypersphere S3 in a Hilbert space, which defines a quantum information system. That is, the set of descriptions Y of signals provides a model for a process about a collection of signals. From the Hypersphere Quantum Information Theorem, we know that the shape { |f(q(−A)) 〉} can be deformed into the shape Y. In addition, from the Borsuk-Ulam Theorem, we also know that:
This means that a definite pure state can be attributed to |f(q(A)) 〉. The system is thus entangled at the S2 level, while is un-entangled at the S3 hypersphere level.
The geometrical aspects of entanglement have been already investigated by offering a numerical approach, iteratively refining an estimated separable state towards the target state to be tested, and checking if the target state can indeed be reached [16]16. We gave instead a different geometrical account of quantum entanglement, by exploring the possibility of a a correlation between it and the Borsuk-Ulam Theorem. We showed that there are striking analogies between the antipodal points evoked by BUT and the entangled particles evoked by quantistics, such that the phenomenon of quantum entanglement can be investigated in guise of an n-sphere embedded in a Hilbert Space. This leads naturally to the possibility of a region-based, instead of a point-based, geometry in which we view collections of signals as surface shapes, where one shape maps to another antipodal one [17–21]. We have developed a mathematical model of antipodal points and regions cast in a physically-informed fashion, resulting in a framework that has the potential to be operationalized and assessed empirically. The notion that information about particles resides on a hypersphere is a counter-intuitive hypothesis, since we live in a 3D world with no immediate perception that 4D space exists at all, e.g., if we walk along one of the curves of a 4-ball, we think are crossing a straight trajectory, not recognizing that our environment is embedded in higher spatial dimensions. The cause/effect relationships of the entangled system occurs in the fourth dimension: for this reason, we are not able to detect it by ordinary means. We are able to look just at at the 3D part part of the S3 system and such an incomplete viewpoint gives us the false impression of a weird picture, apparently incompatible with our common sense. In conclusion, the Borsuk-Ulam theorem sheds new light on quantum entanglement. It explains how the two entangled particles on a hypersphere yield observations about particles that reside on a lower dimensional sphere, thus leading to a quantum information system.
References
Jaeger, G.: Quantum Information an Overview. Springer, New York (2007)
Gruska, J.: Quantum entanglement as a new information processing resource. N. Gener. Comput. 21, 279–295 (2003)
Hauke, P., Tagliacozzo, L.: Spread of correlations in long-range interacting quantum systems. Phys. Rev. Lett. 111(20), 207202 (2013)
Horodecki, P., Horodecki, M.: Entanglement and thermodynamical analogies. Acta Physica Slovaca 3, 141–56 (1998)
Borsuk, K.: Drei saetze ueber die n-dimensionale euklidische sphaere. Fundam. Math. XX, 177–190 (1933)
Cohen, M.M.: A Course in Simple Homotopy Theory. Springer, New York (1973)
Schroedinger, E.: Discussion of probabilty relations between separated systems. Proc. Camb. Philos. Soc. 31, 555–563 (1935)
Peters, J.F.: Computional Proximity. Excursions in the Topology of Digital Images, Intelligent Systems (Reference Library 102, Springer, 2015, doi:10.1007/978-3-319-30262-1)
Weisstein, E.W.: Antipodal points (http://mathworld.wolfram.com/AntipodalPoints.html. 2015)
Henderson, D.W.: Experiencing Geometry. In: Euclidean, Spherical, and Hyperbolic Spaces. 2nd edn. (2001)
Naimpally, S.A., Peters, J.F.: Preservation of continuity. Scientiae Mathematicae Japonicae 76, 305–311 (2013)
Willard, S.: General Topology. Dover Pub., Inc., Mineola (1970)
Collins, G.P.: The shapes of space. Sci. Am. 291, 94–103 (2004)
Borsuk, M., Gmurczyk, A.: On homotopy types of 2-dimensional polyhedral. Fundam. Math. 109, 123–142 (1980)
Dodson, C.T.J., Parker, P.E.: A User’s guide to algebraic topology. Kluwer, Dordrecht (1997)
Leinaas, J.M., et al.: Geometrical aspects of entanglement, arXiv:0605079v1, pp. 1–31 (2006)
Borsuk, M.: Concerning the classification of topological spaces from the standpoint of the theory of retracts. Fundam. Math. XLVI, 177–190 (1958)
Borsuk, M.: Fundamental retracts and extensions of fundamental sequences 64, 55–85 (1969)
Krantz, S.G.: A Guide to Topology. The Mathematical Association of America, Washington (2009)
Manetti, M.: Topology. Springer, Heidelberg (2015)
Peters, J.F.: Topology of Digital Images. Visual Pattern Discovery in Proximity Spaces. Intelligent systems (reference library, 63 Springer, 2014)
Weisstein, E.W.: Pathwise-connected (Mathworld, http://mathworld.wolfram.com/Pathwise-Connected.html. 2015)
Zhang, Y., et al.: Simulating quantum state engineering in spontaneous parametric down-conversion using classical light. Opt. Express. 22, 17039–17049 (2014)
Quesada, N., Sipe, J.E.: Time-ordering effects in the generation of entangled photons using nonlinear optical processes. Phys. Rev. Lett. 114, 093903 (2015)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Peters, J.F., Tozzi, A. Quantum Entanglement on a Hypersphere. Int J Theor Phys 55, 3689–3696 (2016). https://doi.org/10.1007/s10773-016-2998-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10773-016-2998-7