
Abstract
Bender element test setups have gained much popularity in the measurement of shear wave velocity (vs) in soil specimens, with the purpose of estimating the small strain shear modulus (Go). However the determination of shear wave arrival time from bender element tests can be subjective with results varying over a wide range, depending on the method adopted to identify the arrival time. This paper describes a series of bender element tests conducted on a pair of unconfined specimens, 38 mm in diameter and 76 mm in height, where the average data of the two are reported. With shear waves triggered at frequencies between 1 and 20 kHz, identification of the arrival time in both the time and frequency domains were performed. The different methods presented varying degrees of problems and discrepancies, with no one method emerging as a consistent winner. The time domain methods were apparently preferable due to its simplicity, which is perhaps one of the key factors contributing to the growing popularity of bender elements. The frequency domain methods, on the other hand, involved complex manipulation of the original signals, which can be onerous and time-consuming. Based on the findings, it was concluded that the reliability of shear wave velocity measurement with bender elements can be increased and the errors kept to a minimum, if the same arrival time identification method is performed with consistent judgment in a particular test series.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The bender element test is a non-destructive test that has gained popularity in the laboratory determination of small strain shear modulus, Go. The increasing interest in bender element tests may be attributed to the relatively quick and simple test procedure. As the same specimen can be tested at different intervals, the number of specimens required is very minimal. Also, recent advances in the quality of digital signal recording and sophisticated analysis methods have further increased its appeal.
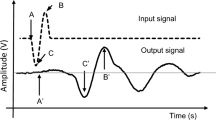
Conventionally, bender elements consist a pair of piezoelectric bimorph transducers: one acts as the transmitter sending off the shear waves, while the other captures the arriving waves (see Fig. 1). The transmitted and received electrical signals are recorded as waveforms on an oscilloscope for further examination to determine the shear wave arrival time. The shear wave velocity is derived by dividing the travel distance of the waves between the transmitter and receiver with the arrival time, which in turn is squared and multiplied with the specimen’s bulk density to obtain Go. This simple computation is based on the assumption of a plane wave traversing a homogeneous and elastic material.

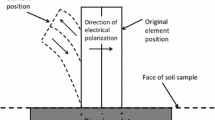
Schematic diagram of a bender element transducer
Historically, Lawrence (1963, 1965) was probably the first to conduct shear wave testing of soil specimens by incorporating shear plates in a triaxial test apparatus. Later, Shirley and Anderson (1975) introduced bender ceramics in place of the shear plates for testing dry sand. These were preferable due to the generation of stronger signals with lower electrical excitation. In a decade’s time, with suitable waterproofing of the bender elements, Dyvik and Madshus (1985) successfully measured shear wave velocity in saturated soils.
As the reliability of a shear wave velocity measurement technique depends very much on the quality of the received signal, much effort has been expended in that direction. For instance, Jovičić et al. (1996) recognised the complexity of square waves for analysis due to the wide spectrum of frequencies present and hence recommended the use of sinusoidal wave pulses in bender element tests. Also, Pennington et al. (2001) found that the most stable signals were obtained if the receiver bender element’s ground was in electrical connection with the soil specimen, and that all earthing routes were avoided for the transmitter to prevent earth induction loops through the specimen to the receiver.
Incorporation of bender elements in triaxial apparatus is arguably the most common practice, as demonstrated by Jovičić et al. (1996), Fioravante and Capoferri (2001), Pennington et al. (2001), and in more recent times by Teachavorasinskun and Lukkanaprasit (2008), Leong et al. (2009), as well as Chan et al. (2010). Conducting bender element tests on unconfined specimens are not unheard of too, such as in the area of stabilised soils, where the bender element tests complemented unconfined compressive strength measurements, as exemplified by the work of Mattsson et al. (2005) and Chan (2006).
2 Methods of Shear Wave Arrival Time Determination
Time domain methods are direct measurements based on plots of the electrical signals versus time (e.g. Viggiani and Atkinson 1995; Arulnathan et al. 1998 Clayton et al. 2004; Porbaha et al. 2005), whereas the frequency domain methods involve analyzing the spectral breakdown of the signals and comparing phase shifts of the components (e.g. Viggiani and Atkinson 1995; Brocanelli and Rinaldi 1998; Arroyo 2001). It is, however, important to note that no method is yet proven to be superior to the others, as most recently reported by Yamashita et al. (2009) in an international parallel bender element tests exercise involving 23 institutions from 11 countries.
2.1 Visual Picking
Taking the first major deflection of the received signal as the shear wave arrival time (to), this is the most commonly adopted method, such as used by Viggiani and Atkinson 1995; Jovičić et al. 1996; Lings and Greening 2001; Kawaguchi et al. 2001 and others. The first significant departure from zero amplitude could be positive or negative, depending on the arrangement and polarity of the bender elements. For easier identification, Teachavorasinskun and Amornwithayalax (2002), Teachavorasinskun and Lukkanaprasit (2008), employed a pair of oppositely polarised signals by changing the polarisation of the transmitter. This is similar to the down-hole seismic field test where the received shear wave signal is captured twice by striking the hammer in opposite directions. However it should be cautioned that polarity inversion of the transmitter bender element reverses the entire waveform, including the near-field components that can mask the actual arrival time (Leong et al. 2009). Considering that the major disadvantage of the visual picking method is the uncertainty when the received signal does not display a distinct and sharp deflection point, such manipulation may be of limited benefits. Quite often this first point or arrival is masked by near-field effects or other interference, like background noise.
2.2 First Major Peak-to-Peak
This method is based on the assumption that the received signal bears a high resemblance to the transmitted one, where the time lapse between the peak of the transmitted signal and the first major peak of the received signal is taken as the shear wave travel time, tpk-pk (e.g. Viggiani and Atkinson 1995; Chan 2006). Due to the dispersion effect caused by specimen geometry, and the energy-absorbing nature of soil, the received signal is usually distorted to various extents while attenuating with distance. Under these circumstances, defining the first major peak becomes more difficult with the presence of several consecutive peaks of very similar amplitudes. As with the visual picking method, this technique is also significantly affected by the quality of received signals.
2.3 Cross-Correlation
Cross-correlation, an adaptation of conventional signal analysis methods, was first introduced by Viggiani and Atkinson (1995) in the context of bender element tests in soils. The cross-correlation analysis method measures the level of correspondence between the two signals: the transmitted, T(t) and received, R(t), as expressed by the cross-correlation coefficient, CCTR(ts):
where Tr is the time record and ts is the time shift between the two signals.
To apply this technique, the time domain signals are converted to the frequency domain by decomposing the signals to produce groups of harmonic waves with known amplitude and frequency. Using Fast Fourier Transform, the signals are first transformed to their linear spectrums, giving the magnitude and phase shift of each harmonic component in the signal, respectively. The complex conjugate of the linear spectrum of the transmitted signal is next computed, and the cross-power spectrum of the two signals established.
Since the magnitude and phase of the cross-power spectrum are the products of the magnitudes and phase differences of the components in the two signals at that particular frequency, the range of common frequencies can be deduced from the magnitude of the cross-power spectrum. The maximum CCTR(ts) denotes the corresponding time shift between the signals being analysed, which is the travel time of the shear wave. Note that the cross-correlation can be a more consistent method compared with the previous two but this only holds true if the transmitted and received traces consist of sufficiently similar frequency components.
2.4 Cross-Spectrum
This is a frequency domain method first proposed by Viggiani and Atkinson (1995) for interpreting bender element test results. Essentially an extension of the procedure used in the cross-correlation method, the frequency spectra of the signals are further manipulated to obtain the absolute cross-power spectrum. An ‘unwrapping’ algorithm is applied on the cross-power spectrum phase angle into account for the missing cycles, resulting in a monotonic plot termed the absolute cross-power spectrum phase diagram. With a linear regression line fitted through the data points over a range of frequency presumed to be common to both signals, the slope of the line gives the group travel time.
2.5 Comparison of Time and Frequency Domain Methods
As mentioned earlier, no one method has yet to be found as being the most reliable in defining the shear wave arrival time. In comparing both methods, Greening and Nash (2004) found a tendency of the time domain methods to underestimate the shear wave arrival time, and hence overestimated the shear wave velocity and Go. The authors also concluded that the frequency domain methods provide more information on the relationship between the transmitted and received signals. Arroyo (2001) made a systematic comparison attempt and identified no clear optimum in a comprehensive statistical analysis, but found that the consistency can be significantly improved by adopting the same method in an entire test series, resulting in a coefficient of variation ranging between 10 and 20% for the shear wave velocity, corresponding to a 20–40% uncertainty in Go.
3 Experimental Work: materials and Equipment
3.1 Fabrication of Bender Element Transducers
The bender elements were made in-house with much assisatance from the Geotechnics research team at Bristol University, UK. 0.5 mm thick bimorph PZT-5A strips (Morgan Electro Ceramics) were first cut into lengths of 16 mm. An opposite-sense polarised/series ceramic, appropriately wired, was used for the receiver and a same-sense polarised/parallel one for the transmitter (Lings and Greening 2001). The electrical connections were made with a 1.8 mm diameter coaxial cable. Once made, the bender elements were encapsulated in resin (a 2-part epoxy resin, Araldite MY753 and HY951) for protection of the ceramic as well as waterproofing. The encapsulated bender element was next potted in a brass cup with the same resin. The final protrusion of the bender element was 12 mm wide × 7 mm long (Fig. 1). The substantial protrusion length was intended to ensure good coupling between the specimen and the bender element, and hence give clear signals for the determination of the shear wave travel time. A BNC (Bayonet Neill Conringman) plug was fixed to the far end of the cable for connection to the relevant devices.
3.2 Shear Wave Velocity Measurement
Connected to a function generator, Thandor TG503 (triggered by a separate function generator, Continental Specialities Corporation Type 4001), the transmitting bender element was excited with ±10 V single cycle sine pulses of 1–20 kHz. The received signal, as detected by the receiving bender element, was amplified through a battery-powered amplifier which inadvertently reversed the polarisation of the signal. The transmitted and received signals were both captured on a digital phosphor oscilloscope (Tektronix TDS3012B, 100 MHz, 1.25 GS/s) and the digitised data were subsequently processed in spreadsheets for different methods of shear wave arrival time determination.
3.3 Test Specimens
The test specimens consisted of a pair of 76 mm high and 38 mm in diameter cylindrical specimens. Made of compacted cement-stabilized kaolin at 42% water content and 3% ordinary Portland cement, based on dry weight of the kaolin, both specimens were wrapped in cling film and kept in an airtight bucket at 20°C for over a month prior to tests. Note that this study was originally conducted as part of a wider examination of stabilised soils using bender elements, hence the stabilised specimens used in this particular branch of investigation. As measurements on the specimen pair were found to be almost identical, average values were reported for the following discussions.
4 Results and Discussions
4.1 Visual Picking
Since the method depends on a visual determination of the first major positive departure of the received signal from zero amplitude, there is no complication if the received signal remains flat before a clear cut deflection on the plot (Fig. 2). However due to the effects of background noise, near-field effects or dispersion, the first sign of the trace rising can be difficult to identify in received signals of poorer quality. As pointed out in the report by Yamashita et al. (2009), a received signal with small voltage and rough resolution make pinpointing the arrival time difficult. Manipulating the input frequency was also not found to bring meaningful change to the frequency of the received wave in the same authors’ work.

Visually-picked method
In addition, it was recommended by Leong et al. (2005) to adopt a ratio of travel distance (L) over wave length (λ) of 3.33 for improved quality of the received signal. In this study, this would require the input frequency (fin) of the transmitted wave to be no less than 15 kHz. However, referring to Fig. 6, vo did not seem to vary significantly over the range of frequencies tested, i.e. maximum difference = 12.7%. The shear wave velocity derived with this method was indeed the least sensitive to fin, despite the inevitable subjectivity of the arrival time identification. As such, the proposed 2 < (L/λ) < 4 by Sánchez-Salinero et al. (1986), to keep off near-field effects (lower limit) and damping (upper limit), do seem to better explain the more consistent vo from 9 kHz onwards (Fig. 6). An initial small trough prior to the first major positive deflection of the received signal (an indicator of near-field effects) was also found to be less prominent or entirely absent in the corresponding traces recorded.
4.2 First Major Peak-to-Peak
With the same signal as shown in Fig. 2, an example of defining tpk–pk is shown in Fig. 3, where the shear wave velocity derived is represented by vpk–pk. It may seem to be a better method than the visual picking of the first deflection point as it is not affected by distortion of the received signal or by near-field effects, but again this method relies on the quality of the signals. Increased frequency difference between the transmitted and received signals (a sign of dispersion) inadvertently leads to lower confidence in the arrival time reading (Yamashita et al. 2009).

First peak-to-peak method
Brignoli et al. (1996) reported that input waves with fin ≥ 5 kHz tend to generate received signals of considerably lower frequencies than the sent ones. This was however not observed in the present work, where frequency decomposition of both the input and output signals (via Fast Fourier transform, FFT) showed that the dominant frequency component in the output signal strongly represented that of the input signal. On the other hand, Leong et al. (2009) highlighted the usually lower predominant frequency of the received signal compared to the input or excitation frequency, and attributed the difference to both soil’s damping properties and soil-transducer interaction. A received signal with little distortion and compatible frequency, hence minimal dispersion, makes the definition of the first major peak more reliable. Also, it can be readily noted in Fig. 3 that the first major peak in the received signal is not of the highest amplitude, which indicates the influence of dispersion.
4.3 Cross-Correlation
Using the same signals as before, an example of the method is illustrated in Fig. 4, where the cross-correlation function (labelled as ‘CC’ in the plot) is plotted alongside the transmitted and received signals. Ideally, the maximum cross-correlation function was supposed to correspond with the first major positive peak in the received signal. However, the first positive peak rarely had the highest magnitude, and thus did not produce the maximum cross-correlation function. This resulted in a misleading interpretation of the travel time (tcc), which was determined by a subsequent peak in the received trace.

Cross-correlation method
Such errors were in agreement with findings of (Yamashita et al. 2009), who established significant scatter in the compilation of arrival time data derived from the method. Arulnathan et al. (1998) elaborated on the theoretically unsound basis for cross-correlation, mainly due to the complex nature of the supposed received signal, incompatible phase-frequency manipulation (i.e. the transfer functions), non-plane wave propagation characteristics and near-field effects. The method may appear rigourous in practice but potentially erratic in analysis.
4.4 Cross-Spectrum
In this method, the shear wave arrival time (tcs) or velocity (vcs) is derived from the phase diagram. An example of a ‘wrapped’ phase plot is shown in Fig. 5a. Every major reversal (negative slope) of the plot represents a missing cycle. By subjecting the phase data to an ‘unwrapping’ process, the missing cycles are accounted for and a monotonic phase plot is obtained, Fig. 5b. Referring to Viggiani and Atkinson (1995), the slope of a linear regression line (α) fitted through data points over a range of frequency, presumed to be common to both signals, gives the so-called ‘group travel time’, tcs = α/2π. Note that non-linearity of the plot depicts dispersion, caused by incompatibility between the phase and group velocities, discernible with further frequency domain manipulations.

a “Wrapped” phase diagram. b “Unwrapped” phase diagram
4.5 Comparison of Shear Wave Arrival Time Determination Methods
Referring back to Fig. 6, summarising the shear wave velocities obtained from the four methods, it appears that vo, vpk–pk and vcc tend to converge at higher frequencies, whereas the vcs values were consistently lower than the other three velocities. This observation agrees with the comment by Arroyo (2001) that tcs tends to be significantly larger than the arrival times defined in the time domain. In his work, Arroyo (2001) also reported that to was consistently lower than tcc but that was not observed in this test series. Referring to the compiled evidence of bender element tests on saturated and dry Toyura sand specimens by Yamashita et al. (2009), (1) tcs was found to be considerably smaller than to; (2) tcc and tcs were almost identical for the saturated specimens, (3) tcc and tcs were markedly different, with no apparent pattern noticeable, for the dry specimens.

Shear wave velocities at various input frequencies
In general, the visually picked to is perhaps most influenced by subjectivity, depending on both signal quality as well as the judgement exercised to determine the arrival time. Determination of tpk-pk may escape the near-field effects, but still affected by the criterion set for the first major peak (e.g. when the first peak is not of the largest magnitude). The tcc method, despite the laborious data manipulation procedure, is still fundamentally influenced by the signal quality, seeing how closely the cross-correlation function follows that of the received signal, Fig. 4. The differences between the shear wave velocities defined with the three methods therefore clearly reflect the uncertainty of the time domain interpretation methods, due to various influencing factors as described earlier.
Based on comparison of the results from the various methods in Fig. 6, there was no evidence that the other methods were more superior to the visual picking method. In the same figure, the scatter of the shear wave velocity data defined with the other methods (i.e. vcc, vpk–pk and vcs) does not appear to be less significant than that observed in the visually picked ones (i.e. vo). Considering that the visual picking method is by far the simplest, most direct and least time-consuming, it is therefore understandable for it to emerge the preferred choice.
As reported in the literature to date, there is still uncertainty regarding the best shear wave arrival time definition method, be it in the time or frequency domain. However, some quarters claimed greater confidence in the potential of the frequency domain methods (e.g. Arroyo 2001, Greening et al. 2003, Greening and Nash 2004). Although assessment in the frequency domain could reveal more information about the soil-wave interaction, the extra data processing involved could inadvertently eclipse the primary advantage of the bender element test—its simplicity.
5 Conclusions
Different methods were used to determine the shear arrival time, working in either the time or frequency domain. Although some other researchers have claimed that frequency domain methods are more reliable, similar observations were not made in the present work. Visual picking of the arrival time in the time domain was found to be equally good, and had the advantage of being simpler and quicker. The recommendations and proposed solutions found in the literature are helpful as a guide, but ought to be adopted with a certain measure of care and caution on a case-by-case basis.
References
Arroyo M (2001) Pulse tests in soil samples. Ph.D. Thesis, University of Bristol, UK
Arulnathan R, Boulanger RW, Riemer MF (1998) Analysis of bender element tests. ASTM Geotech Test J 21(2):120–131
Brignoli EGM, Marino G, Stokoe KHII (1996) Measurement of shear waves in laboratory specimens by means of piezoelectric transducers. ASTM Geotech Test J 29(4):384–397
Brocanelli D, Rinaldi V (1998) Measurement of low-strain material damping and wave velocity with bender elements in the frequency domain. Can Geotech J 35(6):1032–1040
Chan C-M (2006) Relationship between shear wave velocity and undrained shear strength of stabilised natural clays. In: Proceedings of the 2nd international conference on problematic soils. Kuala Lumpur, Malaysia, pp 117–124
Chan KH, Boonyatee T, Mitachi T (2010) Effect of bender element installation in clay samples. Géotechnique 60(4):287–291
Clayton CRI, Theron M, Best AI (2004) The measurement of vertical shear-wave velocity using side-mounted bender elements in the triaxial apparatus. Géoechnique 54(7):495–498
Dyvik R, Madshus C (1985) Lab measurements of Gmax using bender elements. In: Proceedings of the conference on the advances in the art of testing soil under cyclic conditions. ASCE Geotechnical Engineering Division, New York, pp 186–196
Fioravante V, Capoferri R (2001) On the use of multi-directional piezoelectric transducers in triaxial testing. ASTM Geotech Test J 24(3):243–255
Greening PD, Nash DFT (2004) Frequency domain determination of Go using bender elements. ASTM Geotech Test J 27(3):288–294
Greening PD, Nash DFT, Benahmed N, Ferreira C, Viana da Fonseca A (2003) Comparison of shear wave velocity measurements in different materials using time and frequency domain techniques. In: Proceedings of the 3rd international symposium on deformation characteristics of geomaterials. Lyon, France, pp 381–386
Jovičić V, Coop MR, Simic M (1996) Objective criteria for determining Gmax from bender element tests. Géotechnique 46(2):357–362
Kawaguchi T, Mitachi T, Shibuya S (2001). Evaluation of shear wave travel time in laboratory bender element test. In: Proceedings of the 15th international conference on soil mechanics and geotechnical engineering (ICSMGE), vol 1, pp 155–158
Lawrence FV (1963) Propagation of ultrasonic waves through sand. Research report R63–8. Massachusetts Institute of Technology, Cambridge
Lawrence FV (1965) Ultrasonic shear wave velocity in sand and clay. Research report R65–05, soil publication no. 175. Massachusetts Institute of Technology, Cambridge
Leong EC, Yeo SH, Rahardjo H (2005) Measuring shear wave velocity using bender elements. ASTM Geotech Test J 28(5):488–498
Leong EC, Cahyadi J, Rahardjo H (2009) Measuring shear and compression wave velocities of soil using bender-extender elements. Can Geotech Test J 46:792–812
Lings ML, Greening PD (2001) A novel bender/extender for soil testing. Géotechnique 51(8):713–717
Mattsson H, Larsson R, Holm G, Dannewitz N, Eriksson H (2005) Down-hole technique improves quality control on dry mix columns. In: Proceedings of the international conference on deep mixing best practice and recent advances. Stockholm, Sweden, vol 1, pp 581–592
Pennington DS, Nash DFT, Lings ML (2001) Horizontally mounted bender elements for measuring anisotropic shear moduli in triaxial clay specimens. ASTM Geotech Test J 24(2):133–144
Porbaha A, Ghaheri F, Puppala AJ (2005) Soil cement properties from borehole geophysics correlated with laboratory tests. In: Proceedings of the international conference on deep mixing best practice and recent advances. Stockholm, Sweden, vol 1, pp 605–611
Sanchez-Salinero I, Roesset JM, Stokoe KHII (1986) Analytical studies of body wave propagation and attenuation. Geotechnical engineering GR86–15. University of Texas, Austin
Shirley DJ, Anderson AL (1975) Acoustical and engineering properties of sediments. Report no. ARL-TR-75–58, applied research laboratories. University of Texas, Austin
Teachavorasinskun S, Amornwithayalax T (2002) Elastic shear modulus of Bangkok clay during undrained triaxial compression. Géotechnique 52(7):537–540
Teachavorasinskun S, Lukkanaprasit P (2008) Stress induced inherent anisotropy on elastic stiffness of soft clays. Soil Found 48(7):127–132
Viggiani G, Atkinson JH (1995) Interpretation of bender element tests. Géotechnique 45(1):149–154
Yamashita S, Kawaguchi T, Nakata Y, Mikami T, Fujiwara T, Shibuya S (2009) Interpretation of international parallel test on measurement of Gmax using bender elements. Soils Found 49(4):631–650
Acknowledgments
The Author’s immense gratitude cannot be sufficiently expressed towards Dr. Charles C. Hird, recently retired from the University of Sheffield, for his instructive participation in this study. The work described in this paper was conducted at the Geotechnics Laboratory of the same university, where the Author received invaluable assistance from the technical staff. Thanks also to the Ministry of Science, Technology and Innovation (MOSTI) Malaysia for the HRD scholarship awarded for the study, which made up part of the Author’s doctoral project.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Chan, CM. Variations of Shear Wave Arrival Time in Unconfined Soil Specimens Measured with Bender Elements. Geotech Geol Eng 30, 461–468 (2012). https://doi.org/10.1007/s10706-011-9480-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10706-011-9480-3