Abstract
Many clonal plants are characterised by tussock growth forms, but the mechanisms that account for their formation and maintenance are still vague. Here we examine the possible effects of the recently identified phenomenon of self/non-self discrimination on the spatial distribution and patterning of ramets, tussocks and clones in stands of clonal plants. Spatially explicit ramet-based simulation modeling of growth and competition have shown that compact tussocks can be generated as a transient phenomenon that typically disappears at equilibrium. We introduced self/non-self discrimination into a spatial model by decreasing competition between neighbouring ramets on the same clonal fragment. The results demonstrate that self/non-self discrimination can have significant effects on clonal growth and architecture with a clear tendency to generate long-lasting and self-sustaining clumps. Interestingly, this effect was qualitatively independent of other architectural and growth attributes of the plants, making it a candidate mechanism of stable clumped growth forms observed in many clonal plants and communities. Furthermore, the introduction of self/non-self discrimination shifted competition from the level of ramets to that of clonal fragments, which in turns strongly increased genet extinction rates. Our results stress the need for greater attention to the rather neglected scaling up of physiological and morphogenetical controls to the population and community levels.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Ecological systems typically demonstrate complex horizontal structures that involve non-random spatial aggregation of individuals. Recent studies have demonstrated that spatial patterning of plant populations and the resulting relative roles of intra- versus interspecific interactions may have important implications for plant adaptations (Gustafsson and Ehrlén 2003), species interactions and community dynamics (e.g., Silvertown et al. 1992; Law et al. 2003; Bolker et al. 2003).
The study of spatial aggregation goes back to the early days of plant ecology (Greig-Smith 1964) and has been the subject of extensive studies since (for reviews see Bascompte and Solé 1997; Herben and Hara 2001; Rietkerk et al. 2002). Although the formation of spatial patterning is still not fully understood, the prevailing opinion is that the formation of most horizontal spatial patterns requires one or more feedback links between species or between species and the environment over limited spatial ranges (Bascompte and Solé 1997). For example, positive feedback interactions of plants with ecosystem engineers were demonstrated to dictate large-scale spatial patterning in plant communities and ecosystems (Jones et al. 1997; Yizhaq et al. 2005).
Most of the research on spatial aggregation thus emphasizes spatial structures as emergent properties of interactions between several species, or of a single species and its abiotic environment (e.g., soil water content; Gilad et al. 2004; Yizhaq et al. 2005). Much less attention has been paid to spatial aggregation that is governed by intraspecific and interclonal interactions within single plant species. Spatial aggregation of ramets belonging to the same clonal plant is ubiquitous in clonal plants (Wilhalm 1995). The clumps typically form independently of the presence of neighbours and retain their characteristic following fragmentation (Wikberg and Svensson 2003). When a competitively dominant plant demonstrates self-generated ramet clumping, it can easily account for the spatial patterning of its entire community and overwhelm possible finer spatial details caused by feedbacks involving other members of the community.
Attempts to explain ramet aggregation date back to early quantitative plant ecology (Greig-Smith et al. 1947), but in spite of large advances in understanding growth of clonal plants over the past two decades, a consensus regarding the adaptive rationale and mechanisms of ramet clumping is yet to be reached. Primarily, ramet clumping and tussock formation could not be explained as a simple outcome of ramet-level morphological traits such as spacer length or branching rates. Ramet-based models have shown that although compact tussocks can be easily generated by simple branching and growth rules, they are almost invariably transient and typically disappear at equilibrium (Cowie et al. 1995; Adachi et al. 1996; Piqueras and Klimeš 1998; Cain 1990). At equilibrium, space is uniformly populated by intermingled ramets of different genets, and this outcome is reached independently of morphological parameters such as branching rate or internode length, although the latter typically affects the time required to reach equilibrium (Herben and Suzuki 2001).
Tussock structures become stable only when internal regulation is active at a level higher than that of the single ramet. For example, stable ramet aggregation can be produced when sister ramets are interconnected and share resources (Herben 2004). Alternatively, a spatially constrained positive feedback linked to a larger, spatially-constrained, negative feedback that is resulted by e.g., limited soil resources, may also generate sustainable ramet aggregation (Yizhaq et al. 2005).
Until recently, there was little knowledge on if and how such feedbacks could operate at the single clone level. However, recent research has shown that ramets of clonal plants are able to discriminate between ramets that are physiologically connected to them (“self”) and other ramets that are detached from them, regardless of their genetic identity (Gruntman and Novoplansky 2004). Consequently, interconnected ramets allocate less to structures directly involved in competition with each other than with ramets that are separated in space or in time (Falik et al. 2003; Holzapfel and Alpert 2003; Gruntman and Novoplansky 2004). Accordingly, interconnected ramets compete less with each other and are free to allocate greater proportion of their resources to reproduction (Gersani et al. 2001). Further work with Pisum sativum and the spatially extensive clonal grass Buchloë dactyloides suggested that this self/non-self (S/NS) discrimination may be involved in spatial structuring of clonal plants although its authors did not explore its potential effects on the spatial patterning (Falik et al. 2003; Gruntman and Novoplansky 2004).
We here examine the possible effects of S/NS discrimination on the spatial distribution and patterning of ramets, tussocks and clones in stands of clonal plants. We use a spatially explicit simulation model of growth and competition in which the effect of S/NS discrimination is accounted for by a simple decrease of competition effects of neighbouring ramets on each other. This is based on the notion that decreased allocation to competitive structures allows plants to grow more efficiently (Novoplansky et al. 1990). Both ramet density and spatial structure were compared over a range of S/NS discrimination levels. In addition, we analyzed the effects of the interactions of S/NS discrimination with other parameters of clonal growth. Specifically, we tested the interaction of S/NS discrimination with (a) The level of fragmentation, due to its direct affect on the plant’s potential to form large clusters of connected ramets, (b) Parameters that affect ramet placement in space such as internode length and branching angle, that directly dictate the level of competition between ramets belonging to the same clone fragment, (c) Productivity levels, as field observations show that spatial patterning is typically emphasized under low productivity levels (Herben and Hara 2003).
We used a spatially explicit simulation model for clonal plant growth developed by Herben and Suzuki (2001; see also Herben 2004; Wildová et al. 2007). Since the model integrates modules referring to individual-based resource allocation, ramet competition and architecture it could easily accommodate S/NS discrimination of ramets as a function of their physical connectedness by spacers/internodes.
Methods
The model
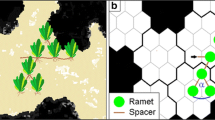
The model incorporates traits of ramet growth, biomass allocation, competitive ability, and spacer architecture to simulate long-term population dynamics [see Herben and Suzuki (2001), Herben (2004) and Wildová et al. (2007) for a detailed description]. The model simulates vegetative growth of clonal plants, with nodes bearing ramets and their immediate internodes as the basic modular growth units (Fig. 1). By definition, all terminal nodes bear ramets (“replacement” growth type; Herben 2004) although ramets may also develop from non-terminal nodes. For the sake of simplicity ramets have fixed sizes. The ramets produce “resource” that is used for further growth of spacers. The resource is a virtual representation of an internal substance that is limiting plant growth (e.g., water, nutrients, photosynthates), whose accumulation is density-dependent. The rate of resource accumulation by a ramet is thus a function of competition with neighbouring ramets; at each time step, the amount of resource produced within each ramet is a function of the number of its neighbouring ramets as follows:

Basic elements of the clonal plant growth in the model
where R t is the resource of the ramet at time t, A is the productivity of the environment, β is a constant expressing density-dependence of resource accumulation and N is the density of neighbours within the local neighbourhood, i.e. a circle with the focal ramet in its centre and a radius of neighbourhood size are taken into account. Neighbourhood size is one of the model’s parameters (see Table 1). The number of neighbouring ramets is weighted by their connectedness to a focal ramet (connected ramets have a lower competitive effect) and is defined as:
where ns is the number of ramets within the neighbourhood distance from the focal ramet that are connected by a spacer to it (“self”), nn is the number of non-connected (non-self) ramets within the neighbourhood distance to the focal ramet, ν expresses the decrease of competition within the same clonal fragment due to connectedness. Accordingly, ν is a measure of self/non-self discrimination (0 <= ν <= 1); with ν = 0 representing no self/non-self discrimination, i.e., all ramets competing equivalently, and ν = 1 representing zero competition between ramets within the same fragment, namely, maximum possible effect of self/non-self discrimination.
Resource levels at each node are dictated by its acquisition by the ramet attached to it, and its allocation to growth. Resource that is not used during a given time step is held at the node until the next time step with no storage costs. No maintenance costs were modeled as pilot simulations have shown that their effects were merely additive to those of productivity. For the sake of simplicity, no resource translocation was implemented.
Clonal fragments grow by adding nodes at terminal positions; the ramet at the maternal node dies and a new ramet is formed at the newly added terminal node (i.e., only replacement growth was modeled). Therefore, ramets are attached to all growing terminal nodes by definition. New nodes are added to terminal nodes if the quantity of the resource at the existing terminal nodes is sufficient. The resource at the node is reduced by the cost of the newly developed internode and this takes place upon its addition. The length and angle of new internodes are independent of the amount of resource of their mother nodes, and the density of ramets and spacers in their neighbourhood. Following the addition of a new node, part of the resource content of the maternal node is transferred to the daughter node.
Nodes may also be added to a clonal fragment by terminal branching, i.e., by adding two instead of one terminal nodes to a maternal node within a single time step. Branching takes place only if the available quantity of resource at that node is sufficient. Similarly to growth, branching angles are also independent of resource content of the node and its neighbourhood. Nodes die deterministically a fixed number of time steps following their formation (Node lifespan; Table 1). When a node dies, the ramet attached to it, if it exists, also dies; if a branch-bearing node dies, the branch becomes independent and the clone fragments into two disconnected units. As new nodes can be formed at the terminal nodes at each time step, node lifespan is a direct measure of fragmentation distance and can thus be used to manipulate clone fragmentation.
The model runs on a continuous homogeneous plane with toroidal boundaries; any heterogeneity is generated by the ramets themselves.
Model parameterisation and simulation experiments
The model was parameterised to represent a clonally-growing plant with ramets that have no ecologically-relevant variation in size. The simulation plane was assumed to represent an area sufficiently large to cover reasonably large spacer systems. Parameter values were selected to approximate values of previously studied stands of a clonal grass (e.g., Festuca rubra, Deschampsia flexuosa or Nardus stricta) typical to 0.5 × 0.5 m samples of temperate mountain short-turf grassland (Table 1, Herben and Suzuki 2001; Herben 2004).
Simulations were run for 200 time steps, representing ca. five growing seasons. Preliminary simulations showed that this time was long enough to attain stable values of ramet numbers and architectural parameters. Two types of simulation experiments were conducted:
-
(i)
Single species experiments. These were initiated with 200 ramets spread evenly over the simulation plane that were run for 200 steps. No new plants were allowed to establish at later steps. At the end of each simulation, the number of ramets and genets were counted, and autocorrelation statistics were calculated.
-
(ii)
Two-species experiments. Here one species (“phytometer”) was initiated with 100 ramets spread evenly over the simulation plane that were run for 100 steps. The phytometer plant had internode length of 0.01, plants fragmented after five steps without S/NS discrimination. In step 100, 20 ramets of the tested species (“invader”) were randomly planted on the simulation plane and the system was run for another 40 steps. Performance of the invader was expressed as the relative rate of increase over the 40 steps following its introduction. During this period, the response curves were always sufficiently close to linear to permit the estimation of a relative rate of increase.
The effects of different combinations and levels of S/NS discrimination, fragmentation (spacer length) and internode length, resource level and branching angles were examined in the mentioned single- and the two-species systems (values used are detailed in Table 1). The outcome was expressed by the number of ramets at the end of the simulation, and by spatial statistics. To calculate spatial autocorrelations, ramet densities and spacer lengths were converted to a grid of 20 × 20 cells and Moran’s I was calculated for lags of 1, 2, 3, and 4 cells. Only lag = 1 is presented here as larger lags did not reveal other patterns. Moran’s I is a measure of spatial autocorrelation for a given distance, with positive values representing aggregation over that distance and negative values representing segregation (i.e., smaller clumps) over that distance (Upton and Fingleton 1985). Moran’s I was also used to calculate cross-correlations between ramet densities and spacer lengths over lag = 0. Since the neighbourhood size was 1/20th of the simulation plane in all runs (Table 1), a lag of one cell approximately corresponded to the same range of aggregation and neighbourhood size.
Results
All simulations showed that increased S/NS discrimination consistently increased ramet density (Fig. 2), an effect that was stronger in plants with short internodes and larger fragmentation distances. In addition, increasing S/NS discrimination profoundly changed the equilibrium spatial pattern of the simulated plants. Plants with no S/NS discrimination typically demonstrated negative autocorrelation of ramet densities over short distances, especially in plants with short internodes (Fig. 3). However, the introduction of S/NS discrimination largely eliminated this negative correlation, but its effect on spatial structure depended on both internode length and fragmentation distance. In plants with long internodes and fragmentation distances, ramets became much more aggregated and started forming clumps (Fig. 4). These clumps were demonstrated by positive autocorrelated densities of both ramets and spacer lengths over short ranges (Fig. 3). In such systems, S/NS discrimination accounted for a more even spacing typical to plants with no S/NS discrimination.

Effect of self-discrimination (0 = no self-discrimination) and spacer fragmentation on ramet and genet number in single species stands. Full bars: fragmentation after five nodes, diagonal hatching: after 10 nodes, open bars: after 20 nodes, horizontal hatching: after 50 nodes, internode length 0.01, initial genet number 200. Bars indicate means ± standard deviations

Effect of self-discrimination and spacer fragmentation on spatial aggregation of ramets in single species stands of plants. (a) internode length 0.01, (b) internode length 0.05. Full bars: fragmentation after 5 nodes, diagonal hatching: after 10 nodes, open bars: after 20 nodes, horizontal hatching: after 50 nodes. Ramet number autocorrelation (i.e. a measure of ramet spatial aggregation) is expressed as Moran’s I of ramet density over a lag = 1 (i.e. neighbourhood distance)

Examples of clonal spatial patterning due to difference in S/NS-discrimination of otherwise identical plants. Lines = spacers, diamonds = ramets. Productivity level 5, internode length 0.01, spacer fragmentation after 20 nodes. (a) plant without S/NS-discrimination (ν = 0), (b) plant with strong S/NS-discrimination (ν = 0.88)
S/NS discrimination also strongly affected the spacer structure. In plants with long fragmentation distances and greater S/NS discrimination, spacers formed clusters that could be easily identified by spatial correlation analysis (data not shown). In such plants, spatial correlation of ramet numbers and spacer lengths decreased, as ramets became aggregated at the periphery of spacer patches that bordered empty patches (Fig. 4). In addition, increased S/NS discrimination markedly decreased the number of genets in the system, indicating more intensive competition between clonal fragments (Fig. 2). Plants with S/NS discrimination were also better competitors, particularly when fragmentation distances were large (Fig. 5).

Effect of S/NS-discrimination capacity and fragmentation distance on competitive ability against a phytometer plant with no S/NS-discrimination capacity. Twenty ramets of the invader are placed into a closed stand of a phytometer (a non-self-discriminating plant with internode length = 0.01 and fragmentation after 5 nodes). Hatching: high self-discrimination of the invader (ν = 0.75), full bars: no self-discrimination of the invader (ν = 0)
The effects of S/NS discrimination were also contingent on architectural parameters of the plant: in plants with larger branching angles, the increase in number of ramets due to S/NS discrimination was less pronounced, but the changes in spatial structure were more pronounced (data not shown). Independently of the effects of S/NS discrimination, increasing productivity invariably increased ramet density. S/NS discrimination similarly affected the spatial structures of both ramets and spacers independently of environmental productivity. On average, ramets and spacers remained relatively sparse in highly productive environments (Fig. 6).

Effect of S/NS-discrimination capacity on spatial aggregation of ramets and spacers in single species stands under different environment productivity. Full bars: low productivity (3), open bars: medium productivity (5), diagonal hatching: high productivity (7). Aggregation in space is expressed as Moran’s I of ramet density over a lag = 1 (i.e., neighbourhood distance). Internode length = 0.01, fragmentation after 20 nodes
Interestingly, the effects of S/NS discrimination were profoundly different from those of non-specific facilitative interactions between ramets. Simple facilitative interactions between ramets produced high-density stands with much lower short-range autocorrelations of ramet densities (i.e. less regular spatial structures than in plants without facilitation), but with no clear-cut clumps as found in plants with S/NS discrimination (data not shown).
Discussion
Self/non-self discrimination and plant form
The results demonstrate that the rather neglected effect of physiological coordination between different modules belonging to the same clone, and more specifically, S/NS discrimination, can have significant effects on growth and architecture of clonal plants. First, all simulation experiments showed strong effects of S/NS discrimination on ramet densities and growth forms. Although the magnitude of these effects was context-dependent, they were qualitatively robust. This suggests that S/NS discrimination could be one of the potential mechanisms responsible for emergent plant- and population-level pattern formation in communities of clonal plants.
Simulated plants that were capable of S/NS discrimination had strong similarities to tussock-growing graminoid plants such as Nardus stricta (Chadwick 1960) or Carex humilis (Wikberg and Svensson 2003). In these plants, tussocks are formed by closely packed ramets that are surrounded by unoccupied spaces. As in the modelled plants, tussocks of these plants conserve their dynamic spatial structure for many decades, indicating that aggregated tussocks do not merely represent a transient state. Our findings suggest that S/NS discrimination is a promising candidate mechanism that might be responsible for aggregated structures of some clonal plants. It has to be noted that although aggregated plant forms can be generated by several mechanisms, they cannot be attained by simple facilitative interactions between adjoining conspecific ramets. Although profoundly affective in changing the density and spatial structure of the stands, facilitative effects cannot account for the formation of separate ramet clusters (Herben; unpubl. data). For facilitative interactions to create clusters additional assumptions have to be introduced, e.g. that two or more factors such as plant density and soil moisture are engaged in a positive feedback (Jones et al. 1997, Herben unpubl. data). In contrast, reduction in competition due to S/NS discrimination leads to the formation of stable clustered structures without further assumptions (Figs. 2, 3).
Second, S/NS discrimination that is based on physiological coordination also decreases the number of coexisting genets. This “clone thinning” is clearly caused by the shift of competition from the level of the ramet to that of the clonal fragment. While without S/NS discrimination genets become extinct only by neutral processes at the ramet level (which can be very slow if the ratio between the numbers of genets and ramets is low), with S/NS discriminating genets are directly engaged in competition as much larger functional units. Accordingly, such clonal fragments become more prone to neutral processes and stochastic extinctions. It is therefore hypothesized that communities dominated by plants with high S/NS discrimination will show much less fine-scale genet diversity. This could be directly tested in the field using molecular methods (Kudoh et al. 1999). Indeed, in many plant species, tussocks that are composed of ramets of single genets lead to low fine-scale genet diversities (Jónsdóttir et al. 2000; Yu et al. 2006). However, in some other plant species adult tussocks may comprise fine-scale mixtures of several genets (e.g., Namroud et al. 2005; Suzuki et al. 2006; Yu et al. 2006), although this is more common when tussocks are decaying (Suzuki et al. 2006; Yu et al. 2006). In such plants, the tussock-level coordination (if it exists) must be at least partly accounted for by mechanisms other than S/NS discrimination.
Implications
The current results as well as previous experimental studies (Falik et al. 2003; Holzapfel and Alpert 2003, Gruntman and Novoplansky 2004) suggest a few additional implications of S/NS discrimination to clonal plant communities. It is expected that S/NS discrimination will be more common and pronounced when plants are restricted to small patches that are often inhabited by only a single clone. Such situations are expected to be common in stressful environments, such as deserts, where favourable patches are rare, their location is predictable and the gaps between them are large and inhospitable (Ellner and Shmida 1981). It is in such “islands of productivity” that the probability of self competition is high and invasion of the favourable patch by other clones can be prevented by compact growth of highly coordinated modules that belong to the same clone. Importantly, the driving mechanism here is the predictability of self-competition and the likelihood of establishment, not productivity as such, as we could find no indication for a meaningful direct dependency of S/NS discrimination on productivity. Accordingly, the rather frequent occurrences of plants with aggregated growth forms in low productivity environments (Kikvidze et al. 2005) should not be interpreted as a direct outcome of the effect of productivity on S/NS discrimination but rather an indirect outcome of low probability of establishment and predictability of self-competition. Prevalence of positive interactions in harsh and low productive environments (Callaway et al. 2002; Choler et al. 2001, but see Maestre et al. 2005) also cannot be solely responsible for the aggregated forms, as positive interactions per se do not lead to highly aggregated structures.
Similarly, it is expected that S/NS discrimination will be more apparent in highly dense clones where the probability of self competition is greater compared to sparse clones, regardless of the underlying selection forces responsible for their high density. Interestingly, this in conjunction with the model’s results may suggest that S/NS discrimination is not only a possible driver of ramet clustering (Fig. 4) but that it may also be selected for by other drivers of high ramet densities. This implies that under certain ecological circumstances a positive feedback is expected by which greater ramet densities select for greater S/NS discrimination and vice versa. However, such positive feedbacks may also involve other mechanisms besides S/NS discrimination such as simple non-specific facilitative interactions (Callaway and Walker 1997).
Finally, under what circumstances S/NS discrimination is expected to be less apparent or even selected against? We suggest that decreased S/NS discrimination is expected when genets are selected to have long spacers and thus have a higher probability of getting intermingled with other genets (e.g., Fig. 4a) or when high proportion of the ramets are positioned along foraging runners, e.g. when vegetation patches are rich but small and sparse. In such cases the likelihood of competitive contacts between sister ramets is low and the selection for minimizing competition between them is expected to be relatively weak. To the extent that S/NS discrimination is based on physiological integration among ramets of the same clone, selection against it is expected only indirectly, when the costs of physiological integration due to risks and costs associated with pathogen spreading (e.g., Stuefer, this volume) or the support of infected or poorly-performing ramets overwhelm the advantages associated with the avoidance of competition among fragments of the same clone.
References
Adachi N, Terashima I, Takahashi M (1996) Mechanisms of central die-back of Reynoutria japonica in the volcanic desert on Mt. Fuji. A stochastic model analysis of rhizome growth. Ann Bot 78:169–179
Bascompte J, Solé RV (eds) (1997) Modeling spatiotemporal dynamics in ecology. Springer, Berlin
Bolker BM, Pacala SW, Neuhauser C (2003) Spatial dynamics in model plant communities: what do we really know? Am Nat 162:135–148
Cain ML (1990) Models of clonal growth in Solidago altissima. J Ecol 78:27–46
Callaway RM, Walker R (1997) Competition and facilitation: a synthetic approach to interactions in plant communities. Ecology 78:1958–1965
Callaway RM, Brooker RW, Choler P, Kikvidze Z, Lortie CJ, Michalet R, Paolini L, Pugnaire FI, Newingham B, Aschehoug ET, Armas C, Kikodze D, Cook BJ (2002) Positive interactions among alpine plants increase with stress. Nature 417:844–848
Chadwick MJ (1960) Nardus stricta L. J Ecol 48:255–267
Choler P, Michalet R, Callaway RM (2001) Facilitation and competition on gradients in alpine plant communities. Ecology 82:3295–3308
Cowie NR, Watkinson AR, Sutherland WJ (1995) Modelling the growth dynamics of the clonal herb Anemone nemorosa L. in an ancient coppice wood. Abstr Bot (Budapest) 19:35–49
Ellner S, Shmida A (1981) Why are adaptations for long-range seed dispersal rare in desert plants. Oecologia 51:133–144
Falik O, Reides P, Gersani M, Novoplansky A (2003) Self/non-self discrimination in roots. J Ecol 91:525–531
Gersani M, Brown JS, O'Brien EE, Maina GM, Abramsky Z (2001) Tragedy of the commons as a result of root competition. J Ecol 89:660–669
Gilad E, von Hardenberg J, Provenzale A, Shachak M, Meron ME (2004) Ecosystem engineers: from pattern formation to habitat creation. Phys Rev Lett 93:98–105
Greig-Smith P, Gemmell AR, Gimingham CH (1947) Tussock formation in Ammophila arenaria (L.) Link. New Phytol 46:262–268
Greig-Smith P (1964) Quantitative Plant Ecology. 2nd Ed. Butterworths Sci. Publs, London
Gruntman M, Novoplansky A (2004) Physiologically mediated self/non-self discrimination in roots. Proc Nat Acad Sci USA 101:3863–3867
Gustafsson C, Ehrlén J (2003) Effects of intraspecific and interspecific density on the demography of a perennial herb, Sanicula europaea. Oikos 100:317–324
Herben T (2004) Physiological integration affects growth form and competitive ability in clonal plants. Evol Ecol 18:493–520
Herben T, Hara T (2003) Spatial pattern formation in plant communities. In: Sekimura T, Noji S, Ueno N, Maini PK (eds) Morphogenesis and pattern formation in biological systems–experiments and models. Springer Verlag, Berlin, pp 223–235
Herben T, Suzuki J (2001) A simulation study of the effects of architectural constraints and resource translocation on population structure and competition in clonal plants. Evol Ecol 15:403–423
Holzapfel C, Alpert P (2003) Root cooperation in a clonal plant: connected strawberries segregate roots. Oecologia 134:72–77
Jones CG, Lawton JH, Shachak M (1997) Positive and negative effects of organisms as physical ecosystem engineers. Ecology 78:1946–1957
Jónsdóttir IS, Augner M, Fagerström T, Persson H, Stenstrom A (2000) Genet age in marginal populations of two clonal Carex species in the Siberian Arctic. Ecography 23:402–412
Kikvidze Z, Pugnaire I, Brooker RW, Choler P, Lortie CJ, Michalet R, Callaway RM (2005) Linking patterns and processes in alpine plant communities: a global study. Ecology 86:1395–1400
Kudoh H, Shibaike H, Takasu H, Whigham DF, Kawano S (1999) Genet structure and determinants of clonal structure in a temperate deciduous woodland herb, Uvularia perfoliata. J Ecol 87:244–257
Law R, Murrell DJ, Dieckmann U (2003) Population growth in space and time: Spatial logistic equations. Ecology 84(1):252–262
Maestre FT, Valladares F, Reynolds J (2005) Is the change of plant-plant interactions with abiotic stress predictable? A meta-analysis of field results in arid environments. J Ecol 93:748–757
Namroud MC, Park A, Tremblay F, Bergeron Y (2005) Clonal and spatial genetic structures of aspen (Populus tremuloides Michx.). Mol Ecol 14:2969–2980
Novoplansky A, Cohen D, Sachs T (1990) How Portulaca seedlings avoid their neighbours. Oecologia (Berlin) 82:490–493
Piqueras J, Klimeš L (1998) Demography and modelling of clonal fragments in the pseudoannual plant Trientalis europaea L. Plant Ecol 136:213–227
Rietkerk M, Boerlijst MC, van Langevelde F, HilleRisLambers R, van de Koppel J, Kumar L, Prins HHT, de Roos AM (2002) Self-organization of vegetation in arid ecosystems. Am Nat 160:524–530
Silvertown J, Holtier S, Johnson J, Dale P (1992) Cellular automaton models of interspecific competition for space - the effect of pattern on process. J Ecol 80:527–534
Suzuki J, Herben T, Krahulec F, Štorchová H, Hara T (2006) Effects of neighbourhood structure and tussock dynamics on genet demography of Festuca rubra in a mountain meadow. J Ecol 94:66–76
Wikberg S, Svensson BM (2003) Ramet demography in a ring-forming clonal sedge. J Ecol 91:847–854
Wildová R, Gough L Herben T, Hershock C, Goldberg DE (2007) Architectural and growth traits differ in effects on performance of clonal plants: an analysis using a field-parameterized simulation model. Oikos 116:836–852
Wilhalm T (1995) A comparative study of clonal fragmentation in tussock-forming grasses. Abstr Bot (Budapest) 19:51–60
Yizhaq H, Gilad E, Meron E (2005) Banded vegetation: biological productivity and resilience. Physica A Statist Mech Appl 356:139–144
Yu FH, Schneller JJ, Krusi B, Schutz M, Tang M, Wildi O (2006) Genetic variability within Carex sempervirens tussocks of contrasting vitality. Int J Plant Sci 167:513–518
Acknowledgements
We thank Jan Wild for drawing maps of spacer structures. The research was supported in part by the GA ČR grants 206/06/0098, 0021620828 and AV0Z60050516 to T.H. and by a research grasnt from the Israel Science Foundation to A.N. This is publication no. 581 of the Mitrani Department of Desert Ecology.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Herben, T., Novoplansky, A. Implications of self/non-self discrimination for spatial patterning of clonal plants. Evol Ecol 22, 337–350 (2008). https://doi.org/10.1007/s10682-007-9214-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10682-007-9214-4