
Abstract
Landscape connectivity is an important consideration in understanding and reasoning about ecological systems. Two features within a landscape can be viewed as connected whenever a path exists between them. In many applications, the relevance of a potential path is assessed relative to the cost or resistance it presents to traversal. Typically, the least-cost paths between landscape features are used to approximate the potential for connectivity. However, traversal of a landscape between two locations may not necessarily conform to a least-cost path. Moreover, recent research has begun to cast some doubt on the how different types of landscape features may influence movement. Thus, it is important to consider the geographic bounds to movement more broadly. Continuous (i.e., raster) and discrete (i.e., vector) representations of connectivity are commonly used to model the spatial relationships among landscape features. While existing approaches can shed meaningful insights on system topology and connectivity, they are still limited in their ability to represent certain types of movement and are heavily influenced by scale of the areal units and how cost of landscape traversal is derived. In order to better address these issues, this paper proposes a new vector-based approach for delineating the geographic extent of corridors and assessing connectivity among landscape features. The developed approach is applied to evaluate habitat connectivity for salamanders to highlight the benefits of this modeling approach.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Landscapes often support connectivity, or paths of movement, for multitudes of systems. For example, hydrologic connectivity can exist between places given certain slope, terrain, and land cover conditions [2, 3, 9]. Transport of chemicals among locations in a landscape can be facilitated by their geographic proximity and geologic composition of intervening areas [17, 39, 43]. In ecological systems, there are several theories and many hypotheses as to how landscape characteristics may influence species movement [13, 15, 40, 57].
While connectivity among landscape features refers to the presence of a path(s) capable of supporting movement, in many ecological systems, movement among habitats may occur within an area or corridor wherein a multitude of alternative paths could be used to provide connectivity between two locations. Both continuous (complete tessellations of space i.e., raster data model) and discrete (i.e., vector data model) representations of a landscape have been used to represent landscape features and to infer the morphology of corridors providing connectivity among them. In continuous representation approaches, such as the raster data model, a landscape is partitioned into a tessellation of non-overlapping, regularly sized areal units or cells. Tradeoffs have to therefore be made between use of smaller pixels (more pixels preserve detail but require greater data storage) and coarser, more generalized representation of a landscape (larger pixels aggregate spatial variation but require less data storage) [44]. Another problem that arises when representing a landscape using a tessellation of areas is that landscape parameters summarized using different sizes, shapes, and configurations of areal units can produce different, often conflicting results for the same analysis approach; commonly referred to as the Problem of Scale [25, 32, 58]. In the vector data model, features in the landscape are represented using point, line, and polygon geometries and do not necessitate a complete tessellation of the landscape. Vector representation is therefore beneficial in that database size can be significantly reduced. Further, an increasing amount of landscape data is being collected in vector format (i.e., Global Positioning Systems, radiolocation, land surveys, etc.) given that geometry of landscape features can be represented much more accurately and efficiently. However, measuring the geographic relationship among vector features becomes much more challenging.
In this article, methods for deriving the topology of landscape corridors and assessing system connectivity using both continuous and discrete representations of landscape features are first reviewed. Next, a new vector-based methodology for delineating corridor morphology and system topology is presented to help overcome some of the limitations of existing approaches. The developed methodology is then applied to infer corridors and connectivity among amphibian breeding sites in a wetland system.
2 Background
To assess whether connectivity exists between two features in a continuous representation of space, such as the raster data model, the region of interest first must be partitioned into a set of non-overlapping areal units, typically square cells in the case of the raster model. That is, every location within the region is contained within one and only one cell. Given this representation of the region, connectivity between individual areal units can then be determined based on a variety of measures of proximity. In the raster data model, two raster cells are often viewed as directly connected (path of movement does not traverse any other cells) if they share a common edge (Rook’s criterion) and/or vertex (Queen’s criterion). In cases where the entire region of interest is represented by a complete tessellation of polygons of varying size and shape, similar criteria for denoting direct connectivity between adjacent or neighboring polygons can be applied [27]. Once the potential for direct connectivity among raster cells has been established, the presence of a direct (single step) or indirect (multiple step) path between two features can be assessed by representing the areal units as network nodes and the direct connections among them as network arcs, and then searching for a path corresponding to a certain criteria [21, 27]. Once the system is represented as a network, there are also many network analysis methods that can then be used to characterize the nature of connectivity within any landscape system [28].
Given information on how a species perceives the cost of traversing different landscape conditions, a suitability surface can be generated to represent the cost or resistance that would be incurred by a species passing through each areal unit in a region [1, 11, 44]. Given this representation of cost/resistance to movement and the topology underlying the areal units, the utility of alternative paths of movement for a particular species can then be approximated. In the most basic sense, one approach is simply to classify locations in a landscape as either suitable or not suitable for supporting movement by a particular species. For instance, Barrows et al. [4] propose a niche model for characterizing suitability of the landscape to the Palm Springs pocket mouse. Those areas of the landscape that are suitable for pocket mouse populations can be considered potential traversable corridors. In other cases, it is often assumed that higher connectivity between habitat sites is likely associated with less resistance to movement [1]. Therefore, least-cost paths are often sought to approximate the presence and level of connectivity. Least-cost paths are also commonly used because they are simple to identify due to the availability of many very efficient algorithms, such as that described by Dijkstra [16]. Applications of least-cost paths based upon a continuous representation of a landscape abound in the literature. For example, given a cost raster derived for a specific species, the least-cost paths between origin and destination habitats can be identified [15, 22]. Once a least-cost path is identified, its total accumulated cost can be compared with what is known about the species’ movement potential (e.g., expert opinion or field observations) to assess whether it is within some acceptable cost threshold [1]. While many studies have simply sought a single least-cost path among habitats, such an assumption risks overlooking other potentially relevant paths [28]. Moreover, scenarios can easily arise where small portions (i.e., one raster cell) of a single least-cost path pass through landscapes of extremely high resistance given that only a small portion of the path might incur that high cost [23]. To help alleviate this potential shortcoming, some studies have sought to search for other portions of the landscape within some distance of a least-cost path to more broadly describe the geographic extent of a corridor [10, 13, 19, 24, 42]. Another approach is to measure the lowest cost of moving between an origin and destination habitat through each intermediate portion of the landscape. For every intermediate cell in the landscape, this task involves evaluating the least-cost path between an origin and destination habitat given that each cell is forced to fall along the path, a problem known as the gateway shortest path problem [27]. A typical implementation of the gateway shortest path approach for generating a corridor between a pair of areal units i and j with other areal units k ∈ K comprising the intervening landscape is as follows. First, compute the cost of the least-cost path, δ ik , between each origin cell i ∈ I and each cell k ∈ K. Next, compute the cost of the least-cost, δ jk , path between each destination cell j ∈ J and each cell k ∈ K. Given this, the least-cost path between a cell i and cell j via any cell k is simply δ ik + δ kj . If it is assumed that a species cannot traverse paths more costly than some known cost/resistance threshold S, then the set of cells participating in the corridor between i and j is limited to those k|(δ ik + δ kj ) ≤ S. Given the efficiency of the gateway shortest path problem, it has seen extensive implementation in commercial GIS software, increasing its access to researchers. As a result, it is commonly used to approximate corridors supporting species movement. For example, Poor et al. [36] generates migration corridors thought to support pronghorn migration based upon a continuous (raster) representation of landscape resistance. Similarly, Brost and Beier [8] use a continuous depiction of the landscape to derive least-cost paths and corridors for specific species as well as those that are more homogeneous in landscape characteristics. In another case, Parks et al. [33] compute corridors between wolverine habitat sites using a derived representation of landscape resistance. A problem they note with this approach is that even though corridors may be generated among habitat areas, not all corridors are the same. To better account for these differences, they apply a weighting scheme to the generated corridors to better differentiate among their relative characteristics and qualities.
The following example depicts a corridor between two habitats based upon a continuous representation of cost of traversal between two amphibian breeding sites (Fig. 1). This corridor was generated by computing the shortest path between the breeding sites via each of the other cells (gateways) in the region. While all of the areal units shown are within the range of amphibians and part of the corridor, those more central have a lower cost of traversal relative to those on the periphery. However, it is important to note that the interpretation of an areal unit’s “lower cost” and inclusion in a corridor is dependent on the species’ ability to identify and use the shortest path to that areal unit from the origin habitat and then identify and use the shortest path from that areal unit to the destination habitat. Whether or not this criteria adequately reflects species’ perception of a landscape is unknown.

Raster corridor between two wetlands
Another challenge in modeling paths and corridors that facilitate species movement is that insight on how species perceive the value of alternative paths is very difficult to observe and has therefore been subject to much speculation and interpretation [6, 36, 44]. As a result, many approaches for conceptualizing and modeling landscape traversal costs and corridors have been proposed. For instance, Beier et al. [5] develop a GIS-based methodology for generating possible landscape corridors for puma, badger, fox, deer, squirrel, rat, mouse, and owl. Using raster data and analysis tools and species’ characteristics, they perform a suitability analysis to determine the relative resistance of traversing the landscape to infer raster-based corridors. Over the range of these species, few geographically overlapping corridors were found [5]. There are many controversies regarding species’ perceptions of landscapes, and expert opinions on the cost of traversing landscape matrix can vary widely. A tremendous number of parameters that might influence movement through a landscape must be considered for even a single species [44]. Furthermore, each parameter thought to be associated with the cost of movement has some kind of uncertainty as to how it actually affects each species [44, 56]. For example, the cost of traversing intervening matrix for amphibians could incorporate their tendency to desiccate, lose energy, and die when proximate to or moving through different types of matrix [14, 49, 52]. Further, movement potential for species such as amphibians based on habitat quality can vary with respect to other factors such as their size, age, and body condition [48]. While the potential for movement through different landscapes has been noted for a variety of species, some uncertainty always exists as to the risks associated with traveling across any landscape. The analysis of cost of movement becomes even more complex given that little is actually known about the exact relationship between species movement and landscape characteristics. For instance, higher quality matrix is often assumed to promote species movement. However, there is also evidence that higher quality matrix may not actually facilitate movement in cases where individuals can settle and establish a home range while lower quality matrix may serve to accelerate or facilitate the dispersion of individuals [45]. Additionally, research increasingly suggests that for some species, such as amphibians, natal dispersion does not target specific habitats, rather movement is somewhat random given that decisions to move are likely made in an incremental manner in response to conditions encountered along the way [47]. That is, for many species, there is little evidence that they have knowledge of or are attempting to seek out a specific destination in an optimal or strategic manner as is implied in the gateway shortest path problem approach to corridor delineation [34]. Furthermore, in many least-cost path approaches to identifying corridors of movement, the distance/cost threshold within which a path is viable is typically selected with very little justification [44].
Discrete approaches for representing geographic space, such as the vector data model, have also seen considerable use in denoting spatial relationships among landscape features. Given situations where the landscape features can be represented as points, polygons, or lines and where portions of the region are not completely covered by these features, other types of proximity conditions can be used to evaluate the presence of a direct relationship or arc between a pair of features. For instance, two point-based features may be viewed as being directly connected if they are within some distance of one another. That is, if the distance (however measured) between the two points is less than the threshold on movement S, then a line could be constructed between them to represent the presence of a direct connection. Application of such proximity conditions can therefore be used to infer the structure of the network supporting connectivity within a landscape [20, 54]. In addition to proximity conditions supporting direct connectivity between habitats, other approaches can be employed to account for uncertainty in species behavior. For example, Lookingbill et al. [26] search for alternative paths between portions of a landscape through simulating semi-random paths of movement. Once the arcs comprising the system have been identified, they can be geometrically dilated (i.e., buffered), as can be done with raster-based least-cost paths, to associate them with a broader area of influence. The resistance or costs of the network arcs/nodes or their polygon counterparts can then be further characterized by overlaying them with other layers of geographic information relevant to the species of interest. For instance, in modeling a salamander habitat network, Pyke [37] first identifies ponds whose centers are within 8.0 km of one another, modeling these direct relationships as arcs. Following this, the arcs are transformed into polygons by dilating them by certain distances (i.e., 100 m) to represent the broader spatial extent of the corridors. Finally, the corridor polygons are evaluated with respect to different measures of landscape suitability.
While existing approaches provide alternative means of delineating and reasoning about landscape corridors, there are still a range of important considerations that should be further incorporated. First, given that many types of habitat systems involve features that may be of very small geographic extent, it is important to devise methods that are less reliant on how a study region is partitioned into areal units of analysis. Second, an often-overlooked feature of corridor delineation is how the role of the morphology of the origin/destination habitats in impacting species movement over the landscape is incorporated. That is, what portions of the origin/destination habitats represent likely embarkment locations for successful movement between the two habitats or how can exposure of habitats to one another be better assessed? Third, there is evidence that for some species, dispersal from an origin habitat is an incremental process as the species do not have the ability to detect a least-cost path a priori, rather successful dispersion to a destination habitat appears to be more of an outcome of a sequence of movements [47] determined by the interaction of individual behavior, habitat features, and decision rules [35]. Additionally, a drawback noted by many studies with both continuous and discrete representations of a landscape is that assumptions regarding how the landscape features affect resistance to movement are extremely subjective at best. Therefore, any modification of the cost surface derived for a specific species can result in a different path or corridor [44]. Hence, there is a need for a more general approach for delineating the geographic extent of corridors between habitat patches that is not solely reliant on how resistance is measured. Finally, another important characteristic of paths and corridors that is often overlooked in much of the landscape connectivity literature is how the actual spatial morphology of the corridor (i.e., corridor size and shape) can affect likelihood of use. In many situations, it is unlikely that a corridor between an origin and destination habitat will always be of uniform shape or width. For instance, it is possible that a corridor may start out as encompassing a large area, but narrows significantly as it approaches a destination habitat. As a result, the narrowing of the corridor may result in lower levels of movement between the habitats. In other words, not all corridors connecting habitats are equivalent in that the wider and less resistive a corridor is, the greater its ability to facilitate interaction among habitats. This concept of corridor width and ability to support movement is akin to the concept of network capacity in the network sciences. The capacity of a network arc is related to the volume of flow/movement that it can support over time. The capacity of a network path then can only be as large as the capacity of the arc with the lowest capacity. As an example, although a residence’s water supply may be ultimately connected to a 10″ water main capable of supporting 3,000 gal/min, the capacity of the residence’s water flow is limited by its 2″ 45 gal/min entrance. Finally, little has been done to conceptualize how corridors may be coincident or overlap for a single (or multiple) species, which could be important in determining movement potentials, rather than simply generating corridors. Additionally, there has been no consideration of a multi-step connectivity in corridor analyses. To address these issues, this article proposes a methodology that is amenable to accepting species preferences in an effort to infer likely pathways of movement.
3 Methods
Given a set of geographically referenced polygon features i representing the location and shape of habitat sites, and a distance or cost range S within which direct connectivity or movement between the habitat sites is feasible, the presence of a direct corridor can be evaluated. For instance, direct connectivity might be assumed to be present if any portion of one habitat polygon is within S of another habitat polygon. While traditional methods often consider all portions of the landscape within S of both habitat patches as part of the direct corridor connecting the two, an adequate representation of the capacity of the corridor connecting the two habitats is not necessarily rendered. In order to address this issue, only those portions of two habitats that are exposed to one another might be of interest. To identify and extract direct corridors under these conditions for any assemblage of habitat polygons, the VECTORCORRIDOR algorithm is proposed.
Notation:
- i,j :
-
indices for habitats
- αi :
-
polygon i
- α j :
-
polygon j
- A i :
-
geometric dilation of α i by distance S
- A j :
-
geometric dilation of α j by distance S
- L i :
-
set of line segments indexed l forming the perimeter of α i
- L j :
-
set of line segments indexed l forming the perimeter of α j
- \( \delta \) l :
-
length/cost of line segment l
- P ij :
-
the set of line segments comprising the perimeter of area i exposed to area j
- P ji :
-
the set of line segments comprising the perimeter of area j exposed to area i
- T ij :
-
the length of perimeter of area i exposed to area j
- T ji :
-
the length of perimeter of area j exposed to area i
- H ij :
-
the convex hull of P ij and P ji
- C ij :
-
polygon corridor between α i and α j
- Φ ij :
-
the capacity of the corridor between areas i and j
Given that at least some portion of polygon j is within S or less of polygon i, i.e., A i ∩ α j ≠ {∅}, the following algorithm can be applied.
VECTORCORRIDOR {S, α i , α j , A i , A j , L i , L j }
-
1.
Calculate the geometric intersection of A i and L j , the perimeter of polygon j within S of polygon i (P ji = A i ∩ L j ).
-
2.
Calculate the geometric intersection of A j and L i , the perimeter of polygon i within S of polygon j (P ij = A j ∩ L i ).
-
3.
Generate the convex hull (H ij ), the minimum convex polygon bounding the line segments in sets P ji and P ij .
-
4.
Compute the geometric union of the convex hull and the two original polygons α i and α j U ij = H ij ∪ α i ∪ α j .
-
a.
Select the polygon k ∈ U ij where k ∩ α i and k ∩ α j . The selected polygon is the primary corridor C ij between polygons i and j.
-
a.
-
5.
Compute the total length/cost of the line segments l in P ji (\( {T}_{ji}={\displaystyle \sum_{l\in {P}_{ji}}{\delta}_l} \)) and P ij (\( {T}_{ij}={\displaystyle \sum_{l\in {P}_{ij}}{\delta}_l} \)). The capacity (Φ ij ) of the corridor between polygons i and j is then equal to the smaller of the two exposed perimeters Φ ij = min(T ji , T ij )
-
6.
TERMINATE VECTORCORRIDOR
VECTORCORRIDOR can be applied to any pair of polygon features, α i and α j (Fig. 2a), in a landscape to provide a vector representation of the corridor’s geographic footprint as well as an approximation of its capacity. To accomplish this, habitat polygons α i and α j are geometrically dilated by a distance S to create new polygons A i and A j representing the maximum range of movement for a species from each site (Fig. 2b). In Steps 1 and 2, the perimeter of α j (L j ) in intersect with A i is identified (P ji = A i ∩ L j ) as is the portion of the perimeter of α i (L i ) in intersect with A j (P ij = A j ∩ L i ) to represent the portions of the habitats exposed to one another (Fig. 2b). In Step 3, the convex hull (the smallest convex polygon enclosing a given geometry) of P ij and P ji is generated to bound the portion of the landscape intervening the exposed portions of both habitat polygons. Following this, in Step 4, a union of the convex hull polygon and the two original polygons α i and α j (U ij ) is calculated in order to provide a basis for discriminating between the primary corridor polygon and the other portions of the convex hull (Fig. 2c). Next, the polygons in U ij are queried to select the polygon that touches both original habitat polygons, which is the polygon comprising the corridor (Fig. 2d). Finally, the lengths of the portions of exposed perimeters P ij and P ji are evaluated, the minimum of which is used to represent the capacity of the corridor. For example, if the perimeter of area i exposed to area j was 308 m and the perimeter of area j exposed to area i is 305 m, then the capacity of the corridor would be the smaller value, 305 m (Fig. 2d). In the event one polygon is completely within S of another, the entire perimeter of that polygon is evaluated in the computation of the corridor’s capacity. While the algorithm is described for assessing a corridor between two habitats, it can be easily applied to evaluate and construct corridors between any pair of habitat polygons.

Vector corridor generation steps: a a set of two polygons, b the perimeter of the two polygons within range S of one another c geometric union of convex hull and the two habitat polygons d selected corridor polygon and its capacity (minimum perimeter length)
The application of network analysis is an effective tool for analyzing geospatial relationships among landscape features [28]. The corridors generated in the previous section used to denote the location and capacity of direct paths of movement between habitat areas can be easily rendered as a network topology to facilitate analysis of multi-step connectivity in habitat systems. A network topology can be generated by representing the habitat polygons as nodes and the direct corridors as arcs. Given a set of polygon corridors, this can be easily accomplished by starting with an empty network G(N,A) where N is the set of nodes and A is the set of arcs. Next, all habitat polygons can be rendered as nodes and added to the network G. Following this, an arc (i, j) between each pair of nodes can be added to the network whenever a corridor C ij exists and any attributes of corridor C ij (i.e., capacity) can then be transferred to the corresponding arc (i, j). For example, the polygons α i and α j in Fig. 3a are represented as nodes and an arc is used to represent the presence of the corridor between the nodes (Fig. 3b). Once the network topology has been established, many network analysis techniques are now enabled.

a Polygon habitats and corridor, b network representation of habitats and corridor
4 Application—Modeling Amphibian Habitat Corridors
For many species, such as amphibians, research increasingly suggests that successful dispersal of individuals among viable habitats is not necessarily contingent upon the presence of a least-cost path. That is, decisions to move are likely incremental, made without knowledge of location of destination breeding sites and qualities of the intervening landscape. In the case of amphibians, it is thought that straight-line (Euclidean) or Great Circle distances (in the case where curvature of the Earth can impact the measurement of distance) between two breeding sites is thought to be one of the primary factors influencing colonization and extinction [41]. Distance ranges for amphibian dispersal can vary among species, life stage, and possibly regions [47, 51]. For instance, Tiger Salamander (Ambystoma tigrinum) dispersal distances range from 245 to 2,830 m [14]. Long-term mark-recapture data for the Wood Frog (Rana sylvatica) indicates an average dispersal distance of 1,275 m [7]. Similar dispersal data for the Marbled Salamander indicate average distances of 440 m, ranging from 142 to 1,297 m [18]. While research has focused on estimating the cost of traversing different types of landscape features, there is much debate on how these costs should be derived. Moreover, there is still some doubt as to whether a less costly or resistive matrix is indeed something that promotes dispersion. For example, higher quality and more amenable matrix conditions could in fact decrease movement while less desirable matrix qualities could trigger the search for better habitat and facilitate movement [45]. In other words, while relative barriers or obstacles to movement may exist, they may simply degrade dispersion success versus forcing species to seek alternative paths to a destination habitat. Given these realities of species movement, a more conservative approach to identifying potential corridors among habitat sites might be to delineate all of those areas of the landscape that would fall within the range of a particular species or taxa. These polygonal corridors would then represent a geographic bound on movement that could then be further refined based upon their relationship to other landscape features contained therein as new behavioral information is gathered.
To demonstrate the utility of the proposed vector corridor generation approach, it is applied to an area within the Grand River watershed, located in Linn County, MO. The Grand River is an important 303(d) listed impaired stream whose water quality has been greatly diminished, primarily by sediment [29]. The Muddy Creek watershed is one of the important contributing sub-watersheds, for both sediment and nutrients flowing into the Grand River watershed. The Muddy Creek watershed encapsulates and area of approximately 17,388 acres and is connected to the Grand River via Locust Creek. Ecologically, the wetland system in this watershed contains a variety of federal and state listed aquatic and terrestrial species [53]. This wetland system is also composed of multiple types of wetlands, including freshwater emergent wetlands, freshwater forested/shrub wetlands, riverine wetlands, and freshwater ponds. Land use within the watershed is approximately 60 % cropland, 25 % pasture, 8 % woodland, and 7 % urban and other uses. Excessive sediment and non-point source (agricultural) pollution are the major water quality problems within the watershed. The condition of the aquatic habitat ranges from poor to good, primarily due to extensive channelization that has resulted in excessive sedimentation. Within this watershed there are 26.7 km of perennial streams, 5.6 km (21 %) of which are channelized [53].
In this application, only the portion of the amphibian habitat system that is completely contained in the study watershed is examined. Wetland polygon data obtained from the National Wetlands Inventory (NWI) dataset are used to represent the location and shape of potential amphibian breeding sites in the watershed [55]. A total of 388 wetland polygons were recorded in the NWI for the Muddy Creek Watershed, ranging from 4.8 to 825,660 m2 in area. The size of the database needed to store the geometry and attributes of these polygons in approximately 465 KB. As a matter of perspective, a raster representation of the same watershed at a minimum mapping unit of 4.8 m2 would involve 31,967,100 pixels, 2.4 % of which represent portions of wetlands, the remainder representing intervening matrix. Moreover, simply because the minimum mapping unit is the same as the area of the smallest wetland does not necessarily imply that it adequately represents the geometry of the wetland. For instance, Fig. 4 illustrates the 4.8 sq. meter pixel representing the 4.8 sq. meter wetland. Clearly, in order to accurately reflect the geometry of the wetland polygon, the minimum mapping unit would have to be much smaller, which would make the raster database unwieldy. While the NWI dataset does not provide a complete enumeration of all habitat sites important to amphibians, such as those that are extremely small [31, 46], it is examined here to better understand how different definitions of suitable amphibian breeding habitat can impact the characteristics of the habitat system. With respect to the NWI data, three scenarios of viable habitat in this watershed are evaluated. In the first scenario, the 388 wetland polygons delineating freshwater emergent wetlands, freshwater forested/shrub wetlands, freshwater ponds, and riverine wetlands are considered viable components of an amphibian breeding habitat system (Fig. 5a). In the second scenario, perennial riverine wetlands and freshwater ponds are not considered viable breeding sites given the presence of fish [50] thus reducing the number of viable breeding sites to 129 wetlands (Fig. 5b). In addition to excluding ponds and riverine wetlands, the final scenario does not consider palustrine forested wetlands (PFOs), modeling a situation where the hydroperiod in the watershed is too short to support amphibian breeding, reducing the number of viable breeding sites to 122 wetlands (Fig. 5c). Extensive research on amphibian movement potential has found that individuals are unlikely to move more than 2,000 m in a single generation [47]. As such, it is assumed that if any portion of a pair of wetlands are within 2,000 m (S) of one another, they can be directly connected via one, single-step corridor polygon. The VECTORCORRIDOR algorithm was coded in the Python programming language using the geographical processing functionalities of ESRI’s ArcGIS, a commercial geographic information system. Given these three plausible configurations of amphibian breeding sites in the watershed, corridors between each pair of wetlands (Fig. 6a–c) were generated using the VECTORCORRIDOR algorithm.

Comparison of a wetland polygon and a pixel of an equivalent area

Alternative configurations of amphibian breeding habitat: a all wetlands, b no ponds or riverine wetlands, and c no ponds, riverine or PFO wetlands

Wetland corridors for a habitat system involving: a all wetlands, b no ponds or riverine wetlands, and c no ponds, riverine or PFO wetlands
The numbers of direct corridors involved in the three configurations in Fig. 6a–c are 10,794, 1,750, and 1,587, respectively, as detailed in Table 1. The corridor systems vary significantly over the three wetland configurations. In Fig. 6a, 90 % of the watershed’s land area is involved in at least one corridor. However, in the configurations shown in Fig. 6b–c, only 46 and 27 %, respectively, of the watershed are involved in a corridor. The capacity, or the minimum geographically exposed perimeter of the breeding site pair can be approximated as shown in Fig. 2. Higher corridor capacity can be interpreted as greater levels of habitat exposure or higher potential for movement. Lower corridor capacity can be viewed as lower geographic exposure among habitats or lower potential for movement. Total corridor capacities associated with Fig. 6a–c are 2,442,450, 473,022, and 337,636 m, respectively (Table 1). Corridor capacities average 113 m, ranging from 0.13 m to 5,623 m. Given the small size of many of the wetlands and corridors it would therefore be extremely cumbersome to attempt their representation using a raster-based approach. While the location and characteristics of the corridors present in each configuration is informative, it is also important to consider how the configurations support system connectivity. For instance, given that there are 388 habitat sites in configuration Fig. 6a, 150,156 (i.e., (388 × 388) − 388) site pairs could theoretically be somehow connected. However, when limiting species movement to a single step or corridor, only 21,588 site pairs can be connected in the case of Fig. 6a, only approximately 14 % of the potential connectivity in the system.
Note that while the direct corridors between wetland pairs are shown in Fig. 6a–c, prospects for multi-step paths between wetlands that may not be directly connected also exist. The capacity of an indirect path between a pair of wetlands is equal to the minimum capacity of the direct corridors comprising the path. The exact number of paths potentially providing connectivity among wetlands and the capacities of the corridors depends on the spatial configuration of the wetlands in the watershed. The identification of other feasible paths supported by the system of wetlands and direct corridors can be better analyzed by viewing the configurations as networks as in Fig. 3b. The network representation of the corridor configurations in Fig. 6a–c are depicted in Fig. 7a–c.

Habitat network for a habitat system involving: a all wetlands, b no ponds or riverine wetlands, and c no ponds, riverine or PFO wetlands
While the habitat networks shown in Fig. 7a–c suggest that all three representations of amphibian breeding sites could facilitate movement among all pairs of sites given that all nodes are integrated in the network, biological constraints on movement restrict the use of a system as geographically expansive as this one by any individual in a single breeding cycle. Additionally, amphibian movement in this watershed is restricted to certain times of the year. Research on amphibians has also indicated that aside from practical distance limitations on dispersal, amphibians likely do not move among multiple breeding sites in a single event. Only when considering movements representing dispersal over multiple generations (e.g., can be assessed with molecular genetic markers) are multiple step paths reasonable (Semlitsch, unpublished data). As such, in this application, it is assumed that a maximum of two direct corridors or arcs can be traversed (one- and two-step paths) to permit assessment of movement over multiple generations. Using the network representations of the wetland systems, all one and two-step paths among pairs of wetlands were then enumerated.
Considering both one- and two-step paths (i.e., permitting an intermediate wetland to be traversed), 56,181 habitat pairs in configuration 7a can now be viewed as connected (37 % of potential system connectivity). Thus, allowing movements to utilize multi-step paths vastly increases the prospects for system connectivity. In addition to promoting extra system connectivity, the consideration of multi-step paths also promotes greater capacity for movement. In the case of site configuration Fig. 7c, the single-step corridors alone provide approximately 337,636 m of capacity. However, given the inclusion of two-step corridors, an additional 8,242,053 m of capacity are gained.
As shown in Table 1, the three habitat configurations (Fig. 7a–c) provide very different perspectives on the prospect for amphibian movement. The configuration shown in Fig. 7a suggests very strong site connectivity while that in Fig. 7c indicates much weaker connectivity and greater susceptibility to fragmentation. The choice of which representation of species movement is most appropriate is therefore still a subjective one. While much debate on the suitability of the underlying landscape for species movement is likely to continue, the application discussed in this article renders several tiers of geographical bounds on movement to assist in prioritizing movement potential. In other words, Fig. 7a would represent a more conservative and encompassing bound on potential corridor connectivity while Fig. 7c might represent a more restrictive geographic bound, but perhaps indicate locations of higher movement potential or likelihood.
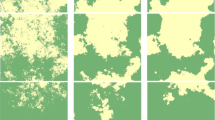
While the corridors (Fig. 6a–c) and networks (Fig. 7a–c) are useful tools for assessing how prospects for connectivity vary given different representations of the amphibian habitat system, they also indicate that some areas of the landscape appear to participate in more corridors than others. To better highlight how areas of the landscape vary with respect to corridor location, the number of corridors overlaying each portion of the study watershed were computed using a GIS. Figure 8a–c illustrate how corridor density manifests in this watershed. The number of overlapping corridors varies considerably throughout the region for each habitat configuration as well as between each habitat configuration. The corridor configuration in Fig. 8a shows many portions of the region participate in multiple corridors. As riverine, pond, and PFO wetlands are removed from consideration (Fig. 8b–c), many portions of the watershed no longer participate in any corridors. However, regardless of change in system representation, there are some areas of the region that continue to be located within multiple corridors. For example, in Fig. 8a–c, there are pockets of the landscape containing multiple corridors in the Southern and Northern regions of the watershed. Taken in sum, a systematic weakness in corridor location appears to be present in the central portion of the watershed, perhaps indicating a potential vulnerability to habitat fragmentation. Again though, it is important to keep in mind that this analysis is premised upon the NWI dataset which does not necessarily include or accurately document all wetlands supporting amphibian populations in the region. A more complete wetland dataset would certainly be needed to investigate these findings.

Number of co-located corridors for systems representing: a all wetlands, b no rivers or ponds, and c no rivers, ponds, or PFO wetlands
There are numerous parameters that can affect connectivity among habitat sites other than distance, such as barriers or obstacles to movement [30]. The corridor generation approach outlined in this article can easily be extended to incorporate the impact of other landscape features (e.g., perennial streams, roads, etc.) and modify the characteristics of the corridors and system connectivity accordingly. Here, one modification, the barrier effect of perennial streams to amphibian movement is examined. All the corridors that require traversal of a perennial stream are not considered conducive to amphibian movement and are removed from the original network. Figure 9a–c illustrates the three polygon corridor networks resulting from this change and Table 1 reports the effect of this modification on the habitat system and the connectivity it supports. Although the number of wetlands for the three habitat configurations is the same as before, by accounting for the stream barriers, the configurations shown in Fig. 9a–c now become fragmented. For instance, even though the system may appear to be intact, in Fig. 9a, two wetlands become completely fragmented from the remainder of the system and in Fig. 9b, three wetlands are isolated from the others.

Corridors accounting for an absolute barrier for a system including: a all wetlands, b no ponds or riverine wetlands, and c no ponds, riverine or PFO wetlands
5 Discussion and Conclusions
Connectivity among landscape features is essential to species’ persistence. Reasoning about and modeling how components of a landscape may function as a connected system is therefore important in understanding species movement. As part of this, identifying likely landscape corridors that may support species movement is of interest. A variety of methods for inferring the location and qualities associated with corridors have been proposed and adapted to represent the movement dynamics of specific species. A popular approach to this is to characterize cost of traversing the landscape based upon a continuous representation of space, such as the raster data model. However, situations can often arise where such an approach may not be appropriate. Raster representation needed to represent small, detailed landscape features over a large region, such as those in the NWI polygons used in this application, can quickly become unwieldy from a data management and analysis perspective. Yet, management of species at this larger scale is precisely what is needed to maintain species persistence across their geographic ranges. Cost of traversing landscape features also have to be accurately ascribed to each areal unit of analysis and species movement is modeled as an optimal decision. For example, identifying paths based upon the assumption that species’ can strategically evaluate many alternative paths and select the best one often are not well justified [35]. Also, when considering the broader ecological system species utilize, it becomes necessary to identify and represent the relationships among many habitats simultaneously, rather than considering a few individual origins and destinations. Moreover, there are many characteristics of corridors aside from measures of cost that are not yet widely incorporated in analyses of ecological systems such as their morphological qualities and measures of the geographic exposure or capacity among habitats.
To address these issues, a new vector-based methodology for deriving corridor topology and system connectivity is proposed in this article. This new vector corridor generation approach is capable of delineating the area intervening any pair of habitat polygons, regardless of their size or shape, and does not require imposing a discretization of the landscape intervening two habitats. This approach presents a conservative means of considering the geographic distance among habitats and bases corridor form upon geographical exposure of habitats to one another as would be encountered in a radial dispersal event that may be more realistic, especially for species such as amphibians [35]. Additionally, the developed approach provides a measure of a corridor’s capacity, or volume of movement a corridor could support. Moving beyond generation and analysis of a few habitat pairs, this new approach can be used to quickly identify and characterize corridors among many pairs of habitats in large ecological systems. As such, this output could provide valuable decision support in the development of landscape management plans, especially for threatened or species of concern. To demonstrate the utility of the developed approach, three configurations of amphibian breeding habitats within a watershed were analyzed. Corridors among habitats were generated using the new vector-based approach and their utility to the system was assessed. Moreover, the utility of these corridors over the broader ecological system was demonstrated by analyzing them as a network, rather than individually. While the corridors generated in this study were based upon wetlands inside a single watershed, cases may arise where the edge effects associated with the delineation of the study region could be problematic. In such situations, the size of the study region could be increased by the distance or cost threshold on movement S and the corridor generation process repeated. If any new wetlands outside the study area do not become connected with those inside the study area, the system is isolated. Else, the process of increasing the size of the study area could be systematically repeated until no new wetlands become connected with those in the original study area. The corridors and networks generated by the proposed approach could provide useful decision support for landscape restoration, mitigation, and the development of species conservation plans. For instance, providing a regional description of wetland connectivity could help inform efforts to locate new amphibian breeding ponds to increase connectivity or strengthen the network to be more resilience to perturbation. Further, our vector-based corridors and networks could be analyzed to identify ponds that are less critical in maintaining connectivity within this ecological system and to highlight high-value wetlands that are ecologically critical to the system.
The results have a number of applications related to the protection and enhancement of wetland habitats, and landscape systems more broadly. The first application of understanding potential pathways of amphibian movement could serve as a measure of biological connectivity between wetlands and waters of the U.S. Biological connectivity to waters of the USA is one of the three types of connectivity (hydrological and chemical being the other two) that would allow the modification of wetlands (particularly isolated wetlands) to be regulated under the Clean Water Act of 1972 [12]. This standard for the regulation of isolated wetlands was established by Justice Kennedy’s opinion when the U.S. Supreme Court ruled in the Rapanos case [38].
The second application of this work is in the identification of the corridors that may support the successful dispersion of amphibian populations. Elimination of these corridors, as by infrastructure development, could have tremendous negative impacts, both in limiting population movement and in the mortality that could result from dessication while crossing roadways and in being crushed by vehicles. Knowledge of these essential locations could better inform the selection of roadway rights-of-way to limit or eliminate the severing of vital connections. Additionally, knowledge of potential corridors could provide valuable insight in the selection of sites for compensatory wetlands or general land preservation activities.
References
Adriaensen, F., Chardon, J. P., De Blust, G., Swinnen, E., Villalba, S., Gulinck, H., & Matthysen, E. (2003). The application of ‘least-cost’ modelling as a functional landscape model. Landscape and Urban Planning, 64(4), 233–247.
Amoros, C., & Bornette, G. (2002). Connectivity and biocomplexity in waterbodies of riverine floodplains. Freshwater Biology, 47, 761–776.
Arscott, D. B., Tockner, K., & Ward, J. V. (2001). Thermal heterogeneity along a braided floodplain river (Tagliamento River, Northeastern Italy). Canadian Journal of Fisheries and Aquatic Sciences, 58(12), 2359–2373.
Barrows, C. W., Fleming, K. D., & Allen, M. F. (2011). Identifying habitat linkages to maintain connectivity for corridor dwellers in a fragmented landscape. The Journal of Wildlife Management, 75(3), 682–690.
Beier, P., Majka, D. R., & Newell, S. L. (2009). Uncertainty analysis of least-cost modeling for designing wildlife linkages. Ecological Applications, 19(8), 2067–2077.
Beier, P., Spencer, W., Baldwin, R. F., & McRae, B. H. (2011). Toward best practices for developing regional connectivity maps. Conservation Biology, 25(5), 879–892.
Berven, K. A., & Grudzien, T. A. (1990). Disperal in the wood frog (rana sylvatica): implications for genetic population structure. Evolution, 44(8), 2047–2056.
Brost, B. M., & Beier, P. (2012). Comparing linkage designs based on land facets to linkage designs based on focal species. PLOS ONE, 7(11), e48965.
Cabezas, A., Gonzalez-Sanchis, M., Gallardo, B., & Comin, F. A. (2011). Using continuous surface water level and temperature data to characterize hydrological connectivity in riparian wetlands. Environmental Monitoring and Assessment., 184, 485–500.
Chetkiewicz, C.-L. B., & Boyce, M. S. (2009). Use of resource selection functions to identify conservation corridors. Journal of Applied Ecology., 46, 1036–1047.
Church, R.L., & Murray. A.T. (2008). Business site selection, location analysis and GIS. Wiley
Clean Water Act of 1972, 33 U.S.C. § 1251 et seq. (2013).
Compton, B. W., McGarigal, K., Cushman, S. A., & Gamble, L. R. (2007). A resistant-kernal model of connectivity for amphibians that breed in vernal pools. Conservation Biology, 21(3), 788–799.
Cosentino, B. J., Schooley, R. L., & Phillips, C. A. (2011). Connectivity of agroecosystems: dispersal costs can vary among crops. Landscape Ecology, 26(3), 371–379.
Cushman, S. A. (2006). Effects of habitat loss and fragmentation on amphibians: a review and prospectus. Biological Conservation, 128(2), 231–240.
Dijkstra, E. W. (1959). A note on two problems in connexion with graphs. Numerische Mathematik, 1, 269–271.
Diaz-Ramirez, J.N., McAnally, W.H. & Martin, J.L. (2010). A review of HSPF evaluations on the southern united states and puerto rico. ASABE—21st Century Watershed Technology: Improving Water Quality and Environment, 177–184.
Gamble, L. R., McGarigal, K., & Compton, B. W. (2007). Fidelity and dispersal in the pond-breeding amphibian, Ambystoma opacum: Implications for spatial-temporal population dynamics and conservation. Biological Conservation, 139, 247–257.
Gurrutxaga, M., Lozano, P. J., & del Barrio, G. (2010). GIS-based approach for incorporating the connectivity of ecological networks into regional planning. Journal for Nature Conservation, 18, 318–326.
Hanski, I. (1999). Habitat connectivity, habitat continuity, and metapopulations in dynamic landscapes. Oikos, 87, 209–219.
Huber, D.L. (1980). Alternative methods in corridor routing. Unpublished Master Thesis, The University of Tennessee, Knoxville.
Huck, M., Jedrzejewski, W., Borowik, T., Milosz-Cielma, M., Schmidt, K., Jedrezejewska, B., Nowak, S., & Myslajek, R. W. (2010). Habitat suitability, corridors and dispersal barriers for large carnivores in Poland. Acta Theriologica, 55(2), 177–192.
Kautz, R., Kawula, R., Hoctor, T., Comiskey, J., Jansen, D., Jennings, D., Kasbohm, J., Mazzotti, F., McBride, R., Richardson, L., & Root, K. (2006). How much is enough? Landscape-scale conservation for the florida panther. Biological Conservation, 130(1), 118–133.
LaRue, M. A., & Nielsen, C. K. (2008). Modeling potential dispersal corridors for cougars in Midwestern North America using least-cost path methods. Ecological Modeling, 212, 372–381.
Levin, S. A. (1991). The problem of pattern and scale in ecology. Ecology, 73(6), 1943–1967.
Lookingbill, T. R., Gardner, R. H., Rerrari, J. R., & Keller, C. E. (2010). Combining a dispersal model with network theory to assess habitat connectivity. Ecological Applications., 20(2), 427–441.
Lombard, K., & Church, R. L. (1993). The gateway shortest path problem: generating alternative routes for a corridor location problem. Geographical Systems., 1, 25–45.
Matisziw, T. C., & Murray, A. T. (2009). Connectivity change in habitat networks. Landscape Ecology, 24, 89–100.
MDC. (2012). Wetland Values, Conservation Commission of Missouri http://mdc.mo.gov/landwater-care/wetlands-management/wetland-values (accessed 01/07/2012 2012).
McRae, B. H., Hall, S. A., Beier, P., & Theobald, D. M. (2012). Where to restore ecological connectivity? Detecting barriers and quantifying restoration benefits. PLOS ONE, 7(12), e52604.
Mortelliti, A., & Boitani, L. (2008). Interaction of food resources and landscape structure in determining the probability of patch use by carnivores in fragmented landscapes. Landscape Ecology, 23, 285–298.
Openshaw, S. (1984). The modifiable areal unit problem. In Concepts and techniques in modern geography, Volume 8. Norwich: Geobooks.
Parks, S. A., McKelvey, K. S., & Schwartz, M. K. (2012). Effects of weighting schemes on the identification of wildlife corridors generated with least-cost methods. Conservation Biology, 27(1), 145–154.
Pinto, N., & Keitt, T. (2009). Beyond the least-cost path: evaluating redundancy using a graph-theoretic approach. Landscape Ecology, 24, 253–266.
Pittman, S. E., Osbourn, M. S., & Semlitsch, R. D. (2014). Movement ecology of amphibians: a missing component to understanding amphibian declines. Biological Conservation, 169, 44–53.
Poor, E. E., Loucks, C., Jakes, A., & Urban, D. L. (2012). Comparing habitat suitability and connectivity modeling methods for conserving pronghorn migrations. PLOS ONE, 7(11), e49390.
Pyke, C. R. (2005). Assessing suitability for conservation action: prioritizing interpond linkages for the California tiger salamander. Conservation Biology., 19(2), 492–503.
Rapanos v. United States, (2006) 547. U. 715. Retrieved from http://www.law.cornell.edu/supct/html/04-1034.ZS.html.
Rentch, J. S., Anderson, J. T., Lamont, S., Sencindiver, J., & Eli, R. (2008). Vegetation along hydrologic, edaphic, and geochemical gradients in a high-elevation poor fen in Canaan Valley, West Virginia. Wetlands Ecology and Management, 16(3), 237–253.
Ribeiro, R., Carretero, M., Sillero, N., Alarcos, G., Ortiz-Santaliestra, M., Lizana, M., & Llorente, G. A. (2011). The pond network: can structural connectivity reflect on (amphibian) biodiversity patterns? Landscape Ecology, 26(5), 673–682.
Ricketts, T. H. (2001). The matrix matters: effective isolation in fragmented landscapes. American Naturalist, 158(1), 87–99.
Rouget, M., Cowling, R. M., Lombard, A. T., Knight, A. T., & Graham, I. H. K. (2006). Designing large-scale conservation corridors for pattern and process. Conservation Biology, 20, 549–561.
Samecka-Cymerman, A., Stankiewicz, A., Kolon, K., Kempers, A. J., & Leuven, R. S. E. W. (2010). Market basket analysis: a new tool in ecology to describe chemical relations in the environment—a case study of the fern athyrium distentifolium in the Tatra National Park in Poland. Journal of Chemical Ecology, 36(9), 1029–1034.
Sawyer, S. C., Epps, C. W., & Brashares, J. S. (2011). Placing linkages among fragmented habitats: do least-cost models reflect how animals use landscapes? Journal of Applied Ecology, 48(3), 668–678.
Semlitsch, R. D., Ecrement, S., Fuller, A., Hammer, K., Howard, J., Krager, C., Mozeley, J., Ogle, J., Shipman, N., Speier, J., Walker, M., & Walters, B. (2012). Natural and anthropogenic substrates affect movement behavior of the Southern Graycheek salamander (Plethodon metcalfi). Canadian Journal of Zoology, 90, 1128–1135.
Semlitsch, R. D., & Bodie, J. R. (1998). Are small, isolated wetlands expendable? Conservation Biology, 12, 1129–1133.
Semlitsch, R. D. (2008). Differentiating migration and dispersal processes for pond-breeding amphibians. Journal of Wildlife Management, 72(1), 260–267.
Semlitsch, R. D., Ryan, T. J., Hamed, K., Chatfield, M., Drehman, B., Pekarek, N., Spath, M., & Watland, A. (2007). Salamander abundance along road edges and within abandoned logging roads in appalachian forests. Conservation Biology, 21(1), 159–167.
Schalk, C. M., & Luhring, T. M. (2010). Vagility of aquatic salamanders: implications for wetland connectivity. Journal of Herpetology, 44(1), 104–109.
Shulse, C. D., Semlitsch, R. D., Trauth, K. M., & Williams, A. D. (2010). Influences of design and landscape placement parameters on amphibian abundance in constructed wetlands. Wetlands, 30, 915–928.
Smith, M. A., & Green, D. M. (2005). Dispersal and the metapopulation paradigm in amphibian ecology and conservation: are all amphibian populations metapopulations? Ecography, 28(1), 110–128.
Snodgrass, J. W., Ackerman, J. W., Bryan, A. L., Jr., & Burger, J. (1999). Influence of hydroperiod, isolation, and heterospecifics on the distribution of aquatic salamanders (Siren and Amphiuma) among depression wetlands. Copeia, 1, 107–113.
Todd, B. L., Matheney, M.P., Lobb, M.D. & Schrader L.H. (1994). Locust creek basin management plan.
Urban, D., & Keitt, T. (2001). Landscape connectivity: a graph theoretic perspective. Ecology, 82(5), 1205–1218.
USFWS. (2012). Wetlands Mapper Documentation and Instructions Manual. http://www.fws.gov/wetlands/Documents/Wetlands-Mapper-Instructions-Manual.pdf (accessed 04/23/2012).
Verbeylen, G., De Bruyn, L., Adriaensen, F., & Matthysen, E. (2003). Does matrix resistance influence red squirrel (Sciurus vulgaris L. 1758) distribution in an urban landscape? Landscape Ecology, 18, 791–805.
Whiles, M. R., Lips, K. R., Pringle, C. M., Kilham, S. S., Bixby, R. J., Brenes, R., Connelly, S., Colon-Gaud, J. C., Hunte-Brown, M., Huryn, A. D., Montgomery, C., & Peterson, S. (2006). The effects of amphibian population declines on the structure and function of neotropical stream ecosystems. Frontiers in Ecology and the Environment, 4(1), 27–34.
Wien, J. A. (1989). Spatial scaling in ecology. Functional Ecology, 3, 385–397.
Acknowledgments
This research has been supported by a grant from the U.S. Environmental Protection Agency (EPA), Region 7. Although the research described in the article has been funded wholly or in part by the U.S. Environmental Protection Agency Region 7 through grant CD-97723401, it has not been subjected to any EPA review and therefore does not necessarily reflect the views of the Agency, and no official endorsement should be inferred.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Matisziw, T.C., Alam, M., Trauth, K.M. et al. A Vector Approach for Modeling Landscape Corridors and Habitat Connectivity. Environ Model Assess 20, 1–16 (2015). https://doi.org/10.1007/s10666-014-9412-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10666-014-9412-8