
Abstract
A superiority–inferiority-based inexact fuzzy stochastic programming (SI-IFSP) model was developed for planning municipal solid waste management systems under uncertainty. The SI-IFSP approach represents a new attempt to tackle multiple uncertainties in objective function coefficients which are beyond the capabilities of existing inexact programming methods. Through introducing the concept of fuzzy random boundary interval, SI-IFSP is capable of reflecting multiple uncertainties (i.e., interval values, fuzzy sets, probability distributions, and their combinations) in both the objective function and constraints, leading to enhanced system robustness. The developed SI-IFSP method was applied to a case study of long-term municipal solid waste management. Useful solutions were generated. A number of decision alternatives could be generated based on projected applicable conditions, reflecting the compromise between system optimality and reliability as well as the tradeoffs between economic and environmental objectives. Moreover, the consequences of system violations could be quantified through introducing a set of economic penalties, reflecting the relationships between system costs and constraint violation risks. The results suggest that the proposed SI-IFSP method can explicitly address complexities in municipal solid waste management systems and is applicable to practical waste management problems.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Waste generation is soaring across the world due to economic development and population growth, representing one of the most pressing challenges in urban zones. As an important solution to this issue, cost-effective planning for municipal solid waste (MSW) management systems was deemed critical [8, 16, 20–22, 27, 37]. An MSW management system involves a number of processes with various socioeconomic and environmental implications, such as waste collection, transportation, treatment, and disposal [40]. Moreover, the processes are associated with many impact factors with multi-period, multi-layer, and multi-objective features, such as collection techniques to be used, service policies to be implemented, and treatment/disposal facilities to be adopted [36]. These processes and factors, as well as their interactions, are fraught with extensive uncertainties. Such uncertainties may be further multiplied by spatial and/or temporal variations of many system components, leading to complexities in the relevant decision-making processes [13, 14, 20–22]. Therefore, inexact optimization techniques are desired to assist in developing long-term MSW management plans under uncertainty.
Previously, a wide spectrum of optimization methods was developed for planning MSW management systems under uncertainty. Most of these methods focused on fuzzy mathematical programming, stochastic mathematical programming, and interval mathematical programming [4, 6, 7, 10, 12, 15, 20–22, 24–26, 28, 30–33, 38, 41]. Among them, interval-parameter linear programming (ILP) is deemed as an effective one [4, 6, 20–22, 31]. In ILP, interval parameters without any distribution information can be directly communicated into the optimization process. Compared to fuzzy linear programming and stochastic linear programming, ILP neither requires specified distributional information for model parameters nor leads to complicated intermediate models, making it more applicable to practical problems [5, 18, 20–23, 34, 35]. However, ILP cannot tackle vague uncertainties expressed as possibilistic or probabilistic distributions, leading to losses of valuable uncertain information. For example, ILP encounters difficulties when the lower and upper bounds of interval parameters can merely be acquired as fuzzy sets instead of deterministic values. Consequently, Nie et al. [32] integrated fuzzy robust linear programming (FRLP) into the framework of ILP, leading to an interval-parameter fuzzy robust programming (IFRP) approach. Although IFRP improved upon ILP by tackling dual uncertainties (i.e., combinations of intervals and fuzzy sets) in the constraints, it could not address uncertainties that are reflected as probability distributions. Correspondingly, Cai et al. [5] proposed a mixed interval-parameter fuzzy stochastic robust programming (MIFSRP) method through incorporating ILP, FRLP, and chance-constrained linear programming (CCP) into a general framework. MIFSRP still suffers from two major limitations: (1) although multiple formats of uncertainties (i.e. intervals, fuzzy sets, and probability distributions) in the constraints could be reflected, it could not address problems where the coefficients of the objective function are subject to multiple uncertainties; (2) since MIFSRP adopts FRLP and CCP to sequentially defuzzify and derandomize fuzzy random variables, a substantial number of additional constraints and variables would be created, resulting in increased computational requirements and system complexities.
This study is thus aimed at remedying the prescribed deficiencies. A recently developed superiority–inferiority-based fuzzy stochastic programming (SI-FSP) method is considered as an attractive one to simultaneously tackle fuzziness and randomness [38]. SI-FSP can directly reflect relationships among fuzzy/fuzzy random coefficients through varying superiority and inferiority degrees (instead of discrete intervals under different α-cut levels in FRLP). Unlike previous fuzzy stochastic mathematical programming, SI-FSP does not require traditional stochastic programming techniques, such as CCP and two-stage programming, to be implemented after the defuzzification process. Moreover, through SI-FSP, uncertainties expressed as fuzzy random variables in not only the constraints but also the objective function could be effectively handled. Although SI-FSP is effective in reflecting probability distributions of fuzzy parameters, it is incapable of addressing independent uncertainties of many parameters that can hardly be expressed as possibilistic or probabilistic distributions. In many real-world cases, the quality of available information is often not satisfactory enough; when uncertainties can only be available as intervals rather than possibilistic or probabilistic distributions, the SI-FSP approach may become inapplicable.
One potential approach to remedy the aforementioned limitations is to incorporate SI-FSP and ILP within a general modeling framework; this leads to a superiority–inferiority-based inexact fuzzy stochastic programming (SI-IFSP) method. The objective of this study is thus to develop such a SI-IFSP method and apply it to the planning of MSW management systems. SI-IFSP can handle intervals with fuzzy random bounds in both objective functions and constraints, avoiding losses of subjective information provided from different decision makers and stakeholders. The consequences of system violations could be quantified through introducing a set of economic penalties, reflecting the relationships between system costs and constraint violation risks. SI-IFSP can also facilitate the generation of a range of decision alternatives, which is helpful for MSW managers to identify desired waste management plans.
2 Methodology
2.1 Development of the SI-IFSP Model
Let \( \widetilde T \) be a family of triangular fuzzy numbers which can be defined as follows:
where scalars a and b (a, b ≥ 0; a, b ∈ R) are named the left and right spreads, respectively. A crisp (i.e., deterministic) number (δ ∈ R) can be illustrated as a triangular fuzzy set \( \widetilde \delta = \left( {\delta, 0,0} \right) \) [42]. Consider two triangular fuzzy sets \( \widetilde P = \left( {u,a,b} \right) \) and \( \widetilde Q = \left( {v,c,d} \right) \in \widetilde T \), where \( \widetilde P \leqslant \widetilde Q \) (Fig. 1). According to Van Hop [38], the superiority of \( \widetilde Q \) over \( \widetilde P \) can be quantified as:
and the inferiority of \( \widetilde P \) to \( \widetilde Q \) can be presented as:

Superiority and inferiority between \( \widetilde P \) and \( \widetilde Q \)
This method can also be extended to measure the superiority and inferiority degrees between two fuzzy random variables. Consider a probabilistic space (\( \Omega, {\text{ }}\Im, {\text{ }}P \)), a fuzzy random variable on this space is a fuzzy-set-valued mapping as follows:
For any Borel set (B) [11] under an α-cut level (between 0 and 1), we have:
where F0 (ℝ) and \( \widetilde X_\omega^\alpha \) stand for the set of fuzzy numbers with compact supports and the α-level set of \( {\widetilde X_\omega } \), respectively; \( \widetilde {\overline X } \) is a fuzzy random variable if and only if ω ∈ Ω; \( \widetilde X_\omega^\alpha \) is a random interval with α ∈ (0, 1] [29].
According to Van Hop [38], for two triangular fuzzy random variables (\( \widetilde {\overline P } \leqslant \widetilde {\overline Q } \)), the superiority of fuzzy random variable \( \widetilde {\overline Q } \) over \( \widetilde {\overline P } \) is:
Likewise, the inferiority of fuzzy random variable \( \widetilde {\overline P } \) to \( \widetilde {\overline Q } \) is:
The above method for measuring superiority and inferiority degrees can be utilized to solve fuzzy stochastic linear programming (FSLP) problems where fuzzy stochastic coefficients exist in objective functions and constraints. Consider a FSLP problem as follows:
subject to:
where \( \widetilde {\overline C } \in {\left\{ \mathbb{R} \right\}^{1 \times n}} \); \( \widetilde {\overline A } \in {\left\{ \mathbb{R} \right\}^{m \times n}} \); \( \widetilde {\overline B } \in {\left\{ \mathbb{R} \right\}^{m \times 1}} \), and ℝ denotes a set of fuzzy random coefficients defined on a probability space (Ω, F, P). An equivalent form of model 6a–6c is:
subject to:
This program requires a maximized objective function value subject to penalties for violating the superiority of the right-hand side (RHS) over left-hand side (LHS) or the inferiority of LHS to RHS. Thus, problem 6a–6c can be reformulated into:
subject to:
where \( \lambda_0^S\left( \omega \right) \) and \( \lambda_i^S\left( \omega \right) \) denote superiority degrees; \( \lambda_0^I\left( \omega \right) \) and \( \lambda_i^I\left( \omega \right) \) denote inferiority degrees; E denotes the expected value; p 0 > 0, q 0 > 0, p i > 0, and q i > 0 are penalty coefficients. The penalty costs (p i and q i ) are determined by decision makers. Higher penalty costs would correspond to stricter policies in terms of constraint violations. Therefore, the decision makers can identify suitable penalty levels based on projected applicable conditions. For example, in an optimistic case, p i and q i can take minimum values and vice versa. The number of constraints in the resulting deterministic model can be reduced drastically through using the superiority and inferiority degrees to defuzzify the uncertainties. Also, the comparisons among fuzzy random coefficients through analyzing their interrelationships would help relax the constraints. The larger are the spreads of fuzzy numbers, the higher is the level of relaxation [38].
Although the SI-FSP method is effective in reflecting uncertainties expressed as fuzzy random variables in both the objective function and constraints, it encounters difficulties when the possibilistic and probabilistic distributions are unavailable. In many real-world cases, decision makers would merely be able to estimate values for the lower and upper bounds of uncertainties rather than specify their distributions. The uncertain parameters with known lower and upper bounds but unknown distributions are interval numbers [21]. Moreover, it may still be hard to acquire deterministic lower and upper bounds for many interval parameters; instead, the two bounds may often be given as subjective judgments from a number of stakeholders, which are expressed as fuzzy random variables. This leads to multiple uncertainties as shown in Fig. 2.

Fuzzy random boundaries for \( {\widetilde {\overline a }^\pm } \)
In order to account for such multiple uncertainties, ILP should be introduced to SI-IFSP. In ILP, the uncertain parameters are expressed as intervals without any distribution information. ILP allows the interval information to be directly communicated into the optimization process [21]. According to Huang et al. [20, 21], an ILP model is defined as follows:
subject to:
where A ± ∈ {R±}m×n; B ± ∈ {R±}m×1; C ± ∈ {R±}1×n; X ± ∈ {R±}n×1; R± denotes a set of interval numbers. Through integrating SI-FSP into the ILP framework, a SI-IFSP model can be formulated as follows:
subject to:
where \( {\widetilde C^\pm } \in {\left\{ {{\Re^\pm }} \right\}^{1 \times n}} \); \( A_r^\pm \in {\left\{ {{{\text{R}}^\pm }} \right\}^{m \times n}} \); \( b_r^\pm \in {\left\{ {{{\text{R}}^\pm }} \right\}^{m \times 1}} \); \( \widetilde {\overline A }_t^\pm \in {\left\{ {{\Re^\pm }} \right\}^{m \times n}} \); \( \widetilde {\overline b }_t^\pm \in {\left\{ {{\Re^\pm }} \right\}^{m \times 1}} \); M = (1, 2, … , m 1, m 1 + 1, …, m); R± denotes a set of interval numbers, and ℜ± denotes a set of intervals with fuzzy random lower and upper bounds, named “fuzzy random boundary interval (FRBI)”.
2.2 Method of Solution
The solution approach for the SI-IFSP model is based on two assumptions. Firstly, it is assumed that there is no intersection between the fuzzy sets of a FRBI’s two bounds. Secondly, it is assumed that the lower and upper bounds of a FRBI are mutually independent, implying that the membership grade of one bound is not correlated to that of the other. The original model needs to be transformed into two submodels; then each submodel is converted into a conventional linear program. A submodel corresponding to f - (when the objective function is to be minimized) is firstly formulated and solved, and then the second submodel corresponding to f + can be formulated based on the solution of the first one [20, 21]. In detail, the first submodel can be formulated as follows (assume that b i ± > 0, and f ± > 0):
subject to:
where x j ±, j = 1, 2, ... , k 1, are interval variables with positive coefficients in the objective function; x j ±, j = k 1 + 1, k 1 + 2, ... , n, are interval variables with negative coefficients; \( {\left| {{a_{rj}}} \right|^{-} } \) and \( {\left| {{a_{rj}}} \right|^{+} } \) represent the lower and upper bounds of the absolute value of \( a_{rj}^\pm \), respectively; Sign (\( a_{rj}^\pm \)) is the sign of \( a_{rj}^\pm \) (i.e., Sign (\( a_{rj}^\pm \)) = 1 when \( a_{rj}^\pm \) ≥ 0; Sign (\( a_{rj}^\pm \)) = −1 when \( a_{rj}^\pm \) < 0). Intorducing a crisp variable (\( {\theta^{-} } \)) and penalty coefficients, model 11a–11e can be transformed into a deterministic linear programming model as follows:
subject to:
Solutions of x j − opt (j = 1, 2, ... , k 1), x j + opt (j = k 1 + 1, k 1 + 2, ... , n), and f – opt can be obtained through solving the above submodel 12a–12i. Then, the second submodel corresponding to f + can be formulated as follows (assuming that b i ± > 0, and f ± > 0):
subject to:
Hence, solutions of x j + opt (j = 1, 2, ..., k 1 ), x j − opt (j = k 1 + 1, k 1 + 2, ... , n), and f + opt can be obtained from submodel 13a–13k. Thus, the final solution of model 10a–10d is f ± opt = [f − opt , f + opt] and x j ±opt = [x j − opt , x j + opt]. Such interval solutions can be interpreted for generating multiple decision alternatives.
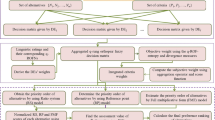
Figure 3 shows the framework of the modeling methodology. The detailed solution process can be summarized as follows:
-
Step 1: Formulate the SI-IFSP model.
-
Step 2: Transform the SI-IFSP primal model into two submodels.
-
Step 3: When the objective is to minimize f ±, formulate f − submodel firstly.
-
Step 4: Introduce θ − and transform the objective function of the f - submodel into an equivalent constraint.
-
Step 5: Calculate superiority and inferiority degrees for the constraints with FRBI coefficients, including the original ones and the one converted from the objective function.
-
Step 6: Introduce penalty coefficients and formulate the new objective function for the f - submodel.
-
Step 7: Solve the f - submodel.
-
Step 8: Formulate f + submodel.
-
Step 9: Repeat steps 4 to 6.
-
Step 10: Solve the f + submodel.
-
Step 11: The final solutions can be obtained as: \( f_{\text{opt}}^\pm = \left[ {f_{\text{opt}}^{-}, f_{\text{opt}}^{+} } \right] \) and \( x_{j\;{\text{opt}}}^\pm = \left[ {x_{j\;{\text{opt}}}^{-}, x_{j\;{\text{opt}}}^{+} } \right] \).
-
Step 12: Stop.

Schematic of the modeling process
An example is provided to illustrate the solution method for the SI-IFSP model. Consider a SI-IFSP problem as follows:
subject to:
where
p(ω1) = 0.25, p(ω2) = 0.5, p(ω3) = 0.25, and Ω = (ω1, ω2, ω3). Assume that all fuzzy sets in the LHS and the objective function are presented as \( \widetilde \delta = \left( {\delta, 0.1,0.1} \right) \in \widetilde T \), and those in the RHS are expressed as \( \widetilde \delta = \left( {\delta, 10,10} \right) \in \widetilde T \). Figure 4 is a schematic diagram for the FRBI coefficients. Penalty levels for violated objective function and constraints are 10 and 3, respectively. Firstly, submodel 1 corresponding to f− can be formulated as follows:
subject to:

FRBI coefficients
An equivalent model of the above submodel is:
subject to:
Then, a deterministic version of submodel 1 is:
subject to:
Thus, the solution of this submodel is \( x_1^{-} \) = 91.133, \( x_2^{-} \) = 63.353, and \( f_{opt}^{-} \) = 690.725. Likewise, the second submodel (corresponding to f +) can be formulated as follows:
subject to:
The solution for the second submodel is \( x_1^{+} \) = 134.778, \( x_2^{+} \) = 203.489, and \( f_{opt}^{+} \) = 2615.506. Thus, the final solution is: \( x_1^\pm \) = [91.133, 134.778], \( x_2^\pm \) = [63.353, 203.489], and \( f_{opt}^\pm \) = [690.725, 2615.506].
3 Application to Solid Waste Management
3.1 Statement of Problems
With increasing waste generation, reducing available lands, and emerging disposal technologies, MSW management systems are becoming more and more sophisticated [19]. In a MSW management system, there are a number of activities that should be considered by decision makers, such as waste collection, transportation, treatment, and disposal [40]. These activities are interacting with a wide spectrum of impact factors that possess various social, cultural, economic, environmental, technical, legislative, and political implications. These factors and their interactions, which are of multi-period, multi-scale, and multi-objective features, could lead to extensive uncertainties and thus cause difficulties in estimating the related parameters.
For example, complexities in waste characteristics and geographical conditions may result in uncertainties in the costs of waste collection, transportation, treatment, and disposal. Likewise, waste generation (including recyclable and compostable waste) is uncertain in nature since it is affected by many factors, such as economic development, population growth, and human activities [32]. Particularly, it is well recognized that capacities of waste management facilities can hardly be obtained as deterministic values due to intrinsic fluctuations of many impact factors (such as waste composition) as well as subjective judgments from various decision makers. For instance, due to the disparities in population, social status, consumption style, and environmental awareness, there may exist considerable differences in waste composition among different municipalities. Even in the same municipality, waste composition may vary from day to day. Also, a number of studies have identified significant seasonal variations in waste composition (e.g., a rise of beverage containers being disposed in summer and an increase in garden waste disposal in spring and fall) [2, 3, 17, 39]. Due to these composition variations, the incineration-related factors, such as moisture content and heating values, may change correspondingly, leading to varied operation conditions for an incinerator and thus fluctuating daily treatment capacity. Therefore, decision makers mostly feel more confident in estimating the two bounds of waste disposal capacities which are respectively known as minimum and maximum daily capacities than giving deterministic values. In real-world cases, even the lower and upper bounds may not be known with certainty; instead, they are often subjectively judged by decision makers or stakeholders. Such subjective information from different individuals would lead to characteristics of both fuzziness and randomness. Hence, multiple formats of uncertainties could exist within the MSW management system.
Moreover, waste buildups at municipal solid-waste-receiving facilities may cause serious unreliability in the MSW management system [1]. For incineration plants, unpredictable events (e.g., traffic congestion, strike, electricity failure, natural disasters, seasonal variations of power supply, and accidents during the incinerating process), regular/irregular maintenance of facilities, and random arrival and service times of waste delivery vehicles could lead to waste buildups [4, 5, 32]. Such waste buildups could also be related to capacities of waste treatment/disposal facilities. For example, when delivery vehicles arrive late in the previous day and early in the next day, a peak waste quantity will occur, such that the waste cannot be treated as normal due to the daily capacity limits of the incinerators. Although temporary waste storage stations could be utilized, there is also a risk of contingent incapability of the receiving facilities. In order to address such problems, it is necessary to introduce a safety coefficient. This coefficient can be defined as the parameter for reflecting the buildups of solid waste in the previous days, which could be an indicator for the safety level of incinerators based on the consideration of many impact factors (e.g., random arrivals of transportation vehicles, electricity failure, and natural disasters) [5]. In detail, when a high value of safety coefficient is given to an incinerator, the risk for insufficient waste management capacity would be raised and vice versa. The safety coefficients are usually estimated empirically or subjectively and are thus of fuzzy nature [32].
3.2 Overview of the Study System
The developed methodology is applied to the planning of an MSW management system, where waste managers are responsible for allocating waste flows from three cities to two treatment/disposal facilities, as shown in Fig. 5. This case is developed based on representative cost and technical data from the solid waste management literature [4, 5, 9, 20–22, 31]. The planning horizon is 15 years, which is further divided into three periods (5 years for each period). Over the planning horizon, an existing landfill and a waste-to-energy (WTE) facility are available to serve the waste treatment/disposal needs. The landfill has an overall cumulative capacity of [4. 58 × 106, 4. 63 × 106] tons. The WTE facility generates residues of approximately 20% to 40% (on a mass basis) of the incoming waste stream; these residues are transported to the landfill for final disposal. The waste generation rates vary among different periods, and the costs for waste transportation and treatment also change temporally and spatially. Table 1 contains the waste generation rates in the three cities, the operating costs of the two facilities, and the transportation costs for waste flows from the cities to the facilities as well as for residues from the WTE facility to the landfill during the three periods. Table 2 shows the capacity and revenue of the WTE facility (expressed as FRBIs). The safety coefficients of the WTE facility in the three time periods are listed in Table 3. Therefore, the problem under consideration is how to allocate the waste flows from the cities to appropriate waste treatment/disposal facilities under a number of environmental, economic, and treatment/disposal constraints. Since multiple formats of uncertainties exist in a variety of system components in terms of intervals, possibilistic, and probabilistic distributions, the SI-IFSP method is considered to be a feasible approach for tackling this type of planning problem.

The study system
3.3 The SI-IFSP Model for Solid Waste Management
In the solid waste management system, the decision variables represent waste flows from city j to waste management facility i in period k, denoted as X ijk (t/day). The objective is to minimize system cost through effectively allocating the waste flows from the three cities to the two facilities. The constraints involve all of the relationships among the decision variables and the waste generation/management conditions. Consequently, a SI-IFSP model can be formulated as follows:
subject to:
(Landfill capacity constraint)
(WTE facility capacity constraints)
(Waste disposal demand constraints)
(Nonnegativity and technical constraints)
where:
- FE ± :
-
residue flow from the WTE facility to the landfill (percent of incoming mass to waste-to-energy facility)
- FT k ± :
-
transportation costs of waste flow from the WTE facility to the landfill in period k ($/t)
- OP ik ± :
-
operating costs of facility i in period k ($/t)
- \( \widetilde {\overline R }E_k^\pm \) :
-
revenue from the WTE facility in period k ($/t)
- \( \widetilde {\overline T }{E^\pm } \) :
-
maximum capacity of the WTE facility (t/day)
- TL ± :
-
capacity of the landfill (t)
- \( TR_{ijk}^\pm \) :
-
transportation costs from city j to facility i during period k ($/t)
- \( WG_{jk}^\pm \) :
-
waste generation rate in city j to facility i during period k (t/day)
- \( \widetilde {\overline \varphi }_k^\pm \) :
-
safety coefficient for the WTE facility during period k
- \( x_{ijk}^\pm \) :
-
waste flow rate from city j to facility i in period k (t/day), i = 1, 2; j = 1, 2, 3; k = 1, 2, 3
- I :
-
index for the facilities (i = 1 for the landfill and i = 2 for the WTE facility)
- J :
-
index for the three cities (j = 1, 2, 3)
- K :
-
index for the time periods (k = 1, 2, 3).
4 Result Analysis
Table 4 presents the results obtained through the SI-IFSP model. The solutions for the objective function and most of the decision variables are intervals. Generally, solutions presented as intervals demonstrate that the related decisions might be sensitive to the uncertain modeling inputs; comparatively, deterministic solutions represent that the related waste management conditions are not sensitive to the input uncertainties. Through the SI-IFSP method, uncertain information can be communicated into the optimization process.
Over the planning horizon, waste from cities 1 and 3 would be shipped to either the landfill or WTE facility, and city 2 would contribute almost all of its waste to the landfill. For city 1, waste shipped to the landfill would be [0, 50] t/day in period 1. This indicates that no waste would be shipped to the landfill under advantageous conditions, while 50 t/day would be shipped under demanding conditions. Most of the waste from city 1 (200 t/day) would be shipped to the WTE facility in period 1. However, with increasing waste generation during periods 2 and 3, the majority of waste from city 1 (i.e., 225 and 250 t/day in periods 2 and 3, respectively) would be transferred to the landfill due to its low operational costs. In comparison, the waste shipped to the WTE facility would be merely [0, 50] t/day in periods 2 and 3. The sharp decline in the waste flows allocated to the WTE facility could be due to the decreased safety coefficient for the WTE facility. For city 2, the majority of the waste ([303, 324] t/day) would be shipped to the landfill in period 1; only a small portion ([47, 76] t/day) would be allocated to the WTE facility. In periods 2 and 3, all of the waste from city 2 (i.e., [375, 425] and [400, 450] t/day in periods 2 and 3, respectively) would be transported to the landfill. This could be attributed to many factors, such as the city’s vicinity to the landfill, the low operating costs of the landfill, and the decrease in the safety level for the WTE facility. As to city 3, it would contribute all of its waste ([275, 325] t/day) to the WTE facility in period 1 due to its vicinity to this facility. However, in periods 2 and 3, the majority of waste from this city would be transported to the landfill, except a small portion (i.e., [0, 50] t/day) that would flow to the WTE facility under demanding conditions.
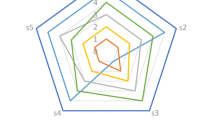
As shown in Fig. 6, in period 1, both the landfill and WTE facility would be jointly utilized for waste treatment and disposal. Waste flows from cities 1, 2, and 3 to the landfill would be [0, 50], [303, 324], and 0 t/day, respectively; waste shipped to the WTE facility from cities 1, 2, and 3 would be 200, [47, 76], and [275, 325] t/day, respectively. The allocation patterns are consistent with the distances from the cities to the facilities, demonstrating that the transportation cost is the dominant factor for waste flow allocation in period 1, while impacts from the operational costs of waste management facilities might be less significant. Compared to the allocation plans in period 1, the landfill would be more heavily used in periods 2 and 3; the WTE facility would merely be used to treat a small portion of the waste under demanding conditions. As indicated in Fig. 6, for all of the three cities, waste allocated to the landfill would increase gradually from period 1 to period 3, while that to the WTE facility would decrease steadily along with the rise of waste generation rate over the planning horizon. This is because that the capacity of WTE facility is relatively fixed and highly dependent on the value of safety coefficient. Comparatively, the landfill is more flexible in dealing with fluctuations of waste flows. Therefore, waste flows to the landfill would increase along with the rising waste generation rate and declining safety level for the WTE facility.

Waste flow allocation over the planning horizon: (1) city 1, (2) city 2, and (3) city 3
The solution of the objective function value is f ± = $[265.2, 498.6] × 106, which represents the range for the net system cost. The cost would change within the solution interval corresponding to the variations of the decision variables (\( x_{ijk}^\pm \)). Specifically, lower decision variable values would lead to a lower cost, representing an alternative under advantageous conditions (e.g., lower waste generation rate and higher available capacity); higher decision variable values would result in a higher cost, corresponding to more demanding conditions (e.g., higher waste generation rate and lower available capacity). Thus, a number of decision alternatives can be generated by adjusting waste flow values within the ranges of the interval solutions according to projected applicable conditions. Also, adjusting the decisions variables within the interval solutions would represent the preferences of decision makers and the variations in system reliability levels. Willingness to pay a higher cost would guarantee a higher level of system reliability. On the contrary, a strong desire to reduce costs would run into a raised risk of system instability (i.e., the risk of unforeseen conditions increases). In general, the actual decisions can be adjusted within the interval solutions, allowing decision makers to incorporate implicit knowledge within the decision process and thus obtain satisfactory decision schemes.
The planning problem can also be solved through the ILP method. The fuzzy random lower and upper bounds of the FRBI coefficients could be replaced by the values with the highest probability (i.e., 60%) and highest membership grade (i.e., 1), representing a single combination among an infinite number of potential ones (based on the information of probability levels and satisfactory grades). Table 5 shows the solutions obtained through the ILP model. It is indicated that the ILP solutions would be different from the SI-IFSP ones. In period 1, all of the three cities would contribute almost all of their waste flows to the landfill due to its low operating costs, except a small portion that would be transported to the WTE facility under demanding conditions. In period 2, all waste from city 1 would flow to the WTE facility, while cities 2 and 3 would contribute all of their waste to the landfill. In period 3, all waste from city 2 and the majority of waste from city 3 would be transported to the WTE facility; the waste of city 1 would be shipped to both the landfill and the WTE facility. The increase in the waste flows to the WTE facility and the decrease in those allocated to the landfill in period 3 would be attributed to the fact that the landfill is approaching its capacity limit in this late period. In general, the ILP solutions demonstrate a stronger preference of shipping the waste to the landfill, compared with the SI-IFSP solutions. This would dramatically shorten the life span of the landfill. Also, due to the potential environmental pollution from landfilling, the serious land scarcity near urban zones, and the growing opposition from public, the ILP solutions may be unfavorable for decision makers. In ILP, deterministic numbers are used to represent the lower and upper bounds of interval numbers, leading to losses of uncertain information and thus the reduction of solution robustness. From the ILP solutions, the landfill would receive all waste from city 2 during all of the three periods. Also, all waste from city 1 in period 1 and that from city 3 in period 2 would be transported to the landfill. Likewise, city 1 would contribute all of its waste flows to the WTE facility in period 2. These demonstrate that, for individual periods, each city would tend to use a single facility to dispose of its waste. In contrast, the SI-IFSP solutions demonstrate that the landfill and WTE facility would be jointly used most of the time, presenting more stability in planning the waste flow allocation.
The results indicate that, in SI-IFSP, multiple uncertainties (i.e., the combination of intervals, fuzzy sets, and probability distributions) in coefficients of both the objective function and constraints can be communicated into the optimization process through introducing the concept of FRBI. The most significant contribution of SI-IFSP lies in that it represents a new attempt to deal with multiple uncertainties in objective function coefficients which were largely overlooked by the previous studies. In addition, SI-IFSP improves upon the ILP method by avoiding oversimplification of fuzzy random boundaries for interval parameters; it also enhances conventional fuzzy stochastic mathematical programming methods in terms of computational efficiency. Relationships among fuzzy random coefficients could be reflected through measuring superiority and inferiority degrees (instead of using intervals at multiple α-cut levels), leading to lower computational requirements and higher practical applicability. Moreover, since satisfactory waste flow plans are identified with the consideration of potential system violations due to possibilistic and/or probabilistic uncertainties, system reliabilities could be highly enhanced. The penalties of violating facility capacity limits can be quantified through introducing a set of economic penalties, which are helpful for examining the relationship between system costs and constraint violation risks. Furthermore, a range of decision alternatives could be generated through adjusting the decision variable values within their interval solutions. These alternatives could be easily interpreted by decision makers based on projected applicable system objectives and conditions, such that applicability of the solutions could be improved. With the above-mentioned strengths, the complexities associated with multiple uncertainties could be effectively reflected through the developed SI-IFSP approach.
5 Conclusions
In this study, a superiority–inferiority-based inexact fuzzy stochastic programming (SI-IFSP) approach was developed for planning MSW management systems under uncertainty. SI-IFSP is capable of reflecting multiple formats of uncertainties (i.e., interval values, possibilistic/probabilistic distributions, and their combinations) in both objective functions and constraints. Through introducing the concept of fuzzy random boundary interval, complexities due to the multiple uncertainties can be reflected, and robustness of the optimization process can be enhanced.
The proposed SI-IFSP approach has three major advantages: (1) it improves upon the interval-parameter linear programming method by avoiding oversimplifying fuzzy random boundaries of intervals into deterministic values; (2) it enhances the superiority–inferiority-based fuzzy stochastic programming method by being able to deal with interval numbers without known probabilistic/possibilistic distributions; (3) it is superior to existing inexact methods handling complex uncertainties in terms of its capability in tackling multiple uncertainties in the objective function as well as its lower computational requirements.
SI-IFSP was applied to a case study of waste management planning. Results of the case study indicate that useful solutions could be obtained. A range of decision alternatives could be generated corresponding to various system conditions. The solutions could also facilitate analyses of tradeoffs between system optimality and reliability as well as those between system safety and economic objectives. The costs of violating facility capacity limits could also be quantified through introducing a set of penalties into the optimization process, helping gain insights into relationships between system costs and constraint violation risks.
This study is an attempt of using mathematical programming for dealing with multiple uncertainties in decision processes. The results suggest that SI-IFSP is applicable to MSW management problems and can be further extended to the fields of water resources management and water/air pollution control planning.
References
Arey, M. J., & Baetz, B. W. (1993). Simulation modeling for the sizing of solid waste receiving facilities. Canadian Journal of Civil Engineering, 20, 220–227.
Bruun, S., Hansen, T. L., Christensen, T. H., Magid, J., & Jensen, L. S. (2006). Application of processed organic municipal solid waste on agricultural land—A scenario analysis. Environmental Modeling and Assessment, 11(3), 251–265.
Burnley, S. J. (2007). A review of municipal solid waste composition in the United Kingdom. Waste Management, 27(10), 1274–1285.
Cai, Y. P., Huang, G. H., Lu, H. W., Yang, Z. F., & Tan, Q. (2009). I-VFRP: An interval-valued fuzzy robust programming approach for municipal waste management planning under uncertainty. Engineering Optimization, doi:10.1080/03052150802488381.
Cai, Y. P., Huang, G. H., Nie, X. H., Li, Y. P., & Tan, Q. (2007). Municipal solid waste management under uncertainty: A mixed interval parameter fuzzy-stochastic robust programming approach. Environmental Engineering Science, 24(3), 338–352.
Cai, Y. P., Huang, G. H., Yang, Z. F., Lin, Q. G., & Tan, Q. (2009). Community-scale renewable energy systems planning under uncertainty—An interval chance-constrained programming approach. Renewable and Sustainable Energy Reviews, 13(4), 721–735.
Campos, L., & Verdegay, J. L. (1989). Linear programming problems and ranking of fuzzy numbers. Fuzzy Sets and Systems, 32, 1–11.
Chambal, S., Shoviak, M., & Thal, A. E., Jr. (2003). Decision analysis methodology to evaluate integrated solid waste management alternatives. Environmental Modeling and Assessment, 8(1), 25–34.
Chang, N. B., & Wang, S. F. (1997). A fuzzy goal programming approach for the optimal planning of metropolitan solid waste management systems. European Journal of Operational Research, 99(2), 303–321.
Chiang, J. (2001). Fuzzy linear programming based on statistical confidence interval and interval-valued fuzzy set. European Journal of Operational Research, 129, 65–86.
Croft, H. T., Falconer, K. J., & Guy, R. K. (1991). Unsolved problems in geometry. New York: Springer.
Dubois, D., & Prade, H. (1999). Qualitative possibility theory and its applications to constraint satisfaction and decision under uncertainty. International Journal of Intelligent Systems, 14(1), 45–53.
Filar, J. A., & Haurie, A. (1998). Uncertainty in environmental models: Dynamic systems perspective. In H. Greppin, R. Degli Agosti & C. Penel (Eds.), The co-action between living systems and the planet (pp. 1–20). Switzerland: University of Geneva Press.
Filar, J. A., & Zapert, R. (1996). Uncertainty analysis of a greenhouse model. In A. Haurie & C. Carraro (Eds.), Operations research and environmental management (pp. 101–118). Dordrecht: Kluwer.
Fortemps, P., & Roubens, M. (1996). Ranking and defuzzification methods based on area compensation. Fuzzy Sets and Systems, 82, 319–330.
Fuertes, L. A., Hudson, J. F., & Mark, D. H. (1974). Solid waste management: equity trade-off models. Journal of Urban Planning and Development, 100(2), 155–171.
Gidarakos, E., Havas, G., & Ntzamilis, P. (2006). Municipal solid waste composition determination supporting the integrated solid waste management system in the island of Crete. Waste Management, 26(6), 668–679.
Huang, G. H., & Baetz, B. W. (1995). Grey quadratic programming and its application to municipal solid waste management planning under uncertainty. Engineering Optimization, 23(3), 201–223.
Huang, Y. F., Baetz, B. W., Huang, G. H., & Liu, L. (2002). Violation analysis for solid waste management systems: An interval fuzzy programming approach. Journal of Environmental Management, 65, 431–446.
Huang, G. H., Baetz, B. W., & Patry, G. G. (1992). A grey linear programming approach for municipal solid waste management planning under uncertainty. Civil Engineering Systems, 9, 319–335.
Huang, G. H., Baetz, B. W., & Patry, G. G. (1995). Grey integer programming: An application to waste management planning under uncertainty. European Journal of Operational Research, 83, 594–620.
Huang, G. H., Sae-Lim, N., Chen, Z., & Liu, L. (2001). Long-term planning of waste management system in the City of Regina—An integrated inexact optimization approach. Environmental Modeling and Assessment, 6(4), 285–296.
Huang, G. H., Sae-Lim, N., Liu, L., & Chen, Z. (2001). An interval-parameter fuzzy-stochastic programming approach for municipal solid waste management and planning. Environmental Modeling and Assessment, 6(4), 271–283.
Inuiguchi, M., & Ramík, J. (2000). Possibilistic linear programming: A brief review of fuzzy mathematical programming and a comparison with stochastic programming in portfolio selection problem. Fuzzy Sets and Systems, 111, 3–28.
Inuiguchi, M., & Sakawa, M. (1998). Robust optimization under softness in a fuzzy linear programming problem. International Journal of Approximate Reasoning, 18(1–2), 21–34.
Jamison, K. D., & Lodwick, W. A. (2001). Fuzzy linear programming using a penalty method. Fuzzy Sets and Systems, 119, 97–110.
Kirca, Ö., & Erkip, N. (1988). Selecting transfer station locations for large solid waste systems. European Journal of Operational Research, 38, 339–349.
Liu, L., Huang, G. H., Liu, Y., & Fuller, G. A. (2003). A fuzzy-stochastic robust programming model for regional air quality management under uncertainty. Engineering Optimization, 35(2), 177–199.
Luhandjula, M. K. (1996). Fuzziness and randomness in an optimization framework. Fuzzy Sets and Systems, 77, 291–297.
Luhandjula, M. K., & Gupta, M. M. (1996). On fuzzy stochastic optimization. Fuzzy Sets and Systems, 81, 47–55.
Maqsood, I., & Huang, G. H. (2003). A two-stage interval-stochastic programming model for waste management under uncertainty. Journal of the Air and Waste Management Association, 53, 540–552.
Nie, X. H., Huang, G. H., Li, Y. P., & Liu, L. (2007). IFRP: A hybrid interval-parameter fuzzy robust programming approach for waste management planning under uncertainty. Journal of Environmental Management, 84(1), 1–11.
Otto, K. N., Lewis, A. D., & Antonsson, E. K. (1993). Approximating α-cuts with the vertex method. Fuzzy Sets and Systems, 55(1), 43–50.
Tan, Q., Huang, G. H., & Cai, Y. P. (2009). Identification of optimal plans for municipal solid waste management in an environment of fuzziness and two-layer randomness. Stochastic Environmental Research and Risk Assessment, doi:10.1007/s00477-009-0307-1.
Tan, Q., Huang, G. H., Wu, C. Z., Cai, Y. P., & Yan, X. P. (2009). Development of an inexact fuzzy robust programming model for integrated evacuation management under uncertainty. Journal of Urban Planning and Development, 135(1), 39–49.
Thomas, B., Tamblyn, D., & Baetz, B. W. (1990). Expert systems in municipal solid waste management planning. Journal of Urban Planning and Development, 116, 150–155.
Thompson, S., & Tanapat, S. (2005). Modeling waste management options for greenhouse gas reduction. Journal of Environmental Informatics, 6, 16–24.
Van Hop, N. (2007). Solving fuzzy (stochastic) linear programming problems using superiority and inferiority measures. Information Sciences, 177, 1977–1991.
Weitz, K. A., Thorneloe, S. A., Nishtala, S. R., Yarkosky, S., & Zannes, M. (2002). The impact of municipal solid waste management on greenhouse gas emissions in the United States. Journal of the Air & Waste Management Association, 52, 1000–1011.
Wilson, D. C. (1985). Long term planning for solid waste planning. Waste Management and Research, 3, 203–216.
Yeomans, J. S., Huang, G. H., & Yoogalingam, R. (2003). Combining simulation with evolutionary algorithms for optimal planning under uncertainty: An application to municipal solid waste management planning in the regional municipality of Hamilton-Wentworth. Journal of Environmental Informatics, 2(1), 11–30.
Zimmerman, H. J. (1991). Fuzzy sets theory and its applications. Boston: Kluwer.
Acknowledgements
This research was supported by the Major State Basic Research Development Program of MOST (2005CB724200). The writers are extremely grateful to the editors and the anonymous reviewers for their insightful comments and suggestions.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Tan, Q., Huang, G.H. & Cai, Y. A Superiority-Inferiority-Based Inexact Fuzzy Stochastic Programming Approach for Solid Waste Management Under Uncertainty. Environ Model Assess 15, 381–396 (2010). https://doi.org/10.1007/s10666-009-9214-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10666-009-9214-6