
Abstract
Based on the predictions of General Circulation Models, significant reduction of precipitation in Mediterranean areas is a possible scenario. Hence, better understanding of the spatial and temporal precipitation patterns is necessary in order to quantify desertification risks and design suitable mitigation measures. This study uses monthly precipitation measurements from a sparse network of 54 monitoring stations on the Mediterranean island of Crete (Greece). The study period extends from 1948 to 2012. The data reveal strong correlations between the western and eastern parts of the island. However, the average annual precipitation in the West is about 450 mm higher than that in the East. We construct a spatial model of average annual precipitation in Crete. The model involves a topographic trend and residuals with anisotropic spatial correlations which are fitted with a recently developed variogram function. We use regression kriging to generate annual precipitation maps and to identify locations of high estimation uncertainty. To our knowledge, this is the most detailed spatial analysis of precipitation in Crete to date. We present the analysis in detail for the year 1971. The trend accounts for ≈ 74% of the total variance. The highest precipitation estimate is 2331 mm in the West and 1781 mm in the East. The highest relative estimation uncertainty (≈ 20%) is observed along the southeastern coastline of the island, where the lowest values of annual precipitation are observed. This region includes one of the major agricultural areas of the island. The same overall patterns are found for other years in the study. Finally, we find no statistical evidence for a decrease in the global (over the entire island) annual precipitation during the study period.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Weather and climate play a crucial role in our lives and the survival of Earth’s ecosystems. According to the Intergovernmental Panel on Climate Change (Hartmann et al. 2013), many research studies find evidence of ongoing climate change. This has raised international concern over the future state of the climate and its impact on the global ecosystem. The variation of climate parameters over space and time is one of the factors that researchers seek to better understand in order to identify risk-prone areas and assess needs for further monitoring. The ultimate goal of such studies is to better inform the design of effective remediation measures that will help societies adapt to the impacts of climate change and allow sustainable development (Apaydin et al. 2011; Georgakakos and Bras 1984; Hutchinson et al. 1996).
Precipitation is a meteorological variable commonly used to evaluate and describe the climate of an area. The intensity and frequency of precipitation varies wildly across different geographical areas and across different seasons. Even at the same location, the features of precipitation can vary significantly over time. Due to the inherent strong variability, precipitation is treated as a stochastic variable with multiscale features that depend on the space/time windows and the resolution of the measurements (Tessier et al. 1993). Both ground-based and remote sensing data are used to study precipitation patterns. Such data are typically used in connection with appropriate mathematical models which find many applications in climatology, agriculture, climate change studies (New et al. 2000), hydrology (Strauch et al. 2017), and human impact studies (Brezonik and Stadelmann 2002; Moral 2010; Portalés et al. 2010).
Both dynamic and statistical models are used to predict and simulate the distribution of precipitation over different spatial and temporal scales. Such models aim to determine the quantity of annual precipitation, the intensity, frequency, and duration of precipitation events, and the statistical distributions followed by the above parameters. General Circulation Models (GCMs) are systems of dynamic equations that describe the coupled atmosphere-ocean system in combination with various modules that represent significant factors of the climate system (e.g., radiation, sea ice, chemistry, and biochemistry modules) as well as suitable interface conditions (Kaper and Engler 2013). GCMs are used to generate long-term, coarse-scale precipitation estimates over coarse numerical grids that cover the globe. GCM predictions can then be downscaled to produce estimates of precipitation at local and regional scales (Eden and Widmann 2014).
Statistical models of precipitation, on the other hand, are purely data driven. Geostatistical methods treat precipitation as a spatially extended stochastic variable, i.e., a random field. Such methods have been used to derive regional rainfall maps by interpolating available point measurements from rain gauges (Atkinson and Lloyd 1998; Pardo-Igúzquiza 1998; Goovaerts 2000; Kyriakidis et al. 2001; Ly et al. 2011). Geostatistical studies often incorporate secondary information in the interpolation model (Tobin et al. 2011). For example, Goovaerts (2000) uses three multivariate geostatistical spatial prediction algorithms that incorporate a digital elevation model: simple kriging with varying local means, kriging with an external drift, and collocated co-kriging. Rain gauge data have also been combined with radar (Haberlandt 2007) and satellite data (Park et al. 2017) to improve the quality of the interpolated maps. Another geostatistical study (Tushaus et al. 2015) focuses on the impact of topographical parameters on mountain rain. A comparison of different geostatistical approaches for mapping climate variables incorporating geographical information systems (GIS) is presented in Moral (2010).
Stochastic weather generators (SWGs) are statistical models that aim to produce multiple possible scenarios of precipitation based on historical data. Such scenarios differ from weather forecasts because their goal is not optimal prediction but rather capturing the range of potential weather states. For simulating precipitation both non-parametric generators that are based purely on historical data (Semenov et al. 1998), and parametric SWG generators that employ probabilistic models (Flecher et al. 2010) are used. The statistical properties of the simulated realizations are similar to those of the observed data (Ailliot et al. 2015; Baxevani and Lennartsson 2015). The probability distributions commonly used as models of precipitation intensity comprise the gamma distribution (for observations below a specific threshold) (Katz 1977) and the generalized Pareto distribution (for values that exceed the specified threshold) (Naveau et al. 2014). A different approach used in areas with increased risk of desertification is based on drought indices that quantify the probability of prolonged absence of precipitation. For example, the Standardized Precipitation Index (SPI) (Keyantash 2018) can quantify meteorological drought on a range of timescales (McKee et al. 1993; Vrochidou 2013; Palmer 1965; Tsakiris et al. 2007).
This paper studies annual precipitation in the Mediterranean island of Crete (Greece) for a period of 65 years (1948–2012) based on data from a sparse network of rain gauges. The spatiotemporal patterns of precipitation are a major topic of research in the Mediterranean region (Hatzianastassiou et al. 2008; Flaounas et al. 2013; Longobardi et al. 2016). Naoum and Tsanis (2003) tested different GIS-based interpolation methods (multiple linear regression, splines, linear kriging, trend surface polynomial, inverse distance weighted) to map the spatial distribution of precipitation in Crete during the period 1967-1997 concluding that multiple linear regression performs best. This study captures the overall spatial precipitation trend in Crete. Voudouris et al. (2006) also employed multiple linear regression along the lines of Naoum and Tsanis (2003). Nastos et al. (2013) presented precipitation maps for Greece, including Crete, based on data from ground stations and regional climate models. This analysis also captures the overall trend, but it is based on data from only three stations in Crete. Varouchakis et al. (2018) used Regression kriging combined with a digital elevation model as auxiliary information to map the average annual precipitation in the period 1981–2014. A study of spatial precipitation patterns in Turkey also led to similar results (Bostan et al. 2012).
The goal in this study is to investigate in detail the local patterns of average annual precipitation in Crete in order to better resolve areas of low precipitation and/or high uncertainty. We also investigate temporal trends of the annual precipitation during the study period. Our analysis is based on the geostatistical method of regression kriging (RK) (Hengl et al. 2007). We apply RK using a deterministic trend model that accounts for the geography and topography of the area and a three-dimensional anisotropic Spartan variogram function to model the spatial correlations of the residuals (Hristopulos and Elogne 2007). This variogram model is applied for the first time to precipitation data. The precipitation maps that we derive represent in detail the precipitation patterns across the island. We also generate estimates of the variance of the prediction errors. This information permits constructing uncertainty maps that highlight areas where additional monitoring is recommended. We generated forty five annual precipitation maps (for the period 1965–2009). Maps were not constructed for the periods 1948–1964 and 2010–2012 due to high data scarcity (as illustrated in Fig. 13). For conciseness, we present the analysis in detail for one year (1971), and we show precipitation maps for the recent 6-year period 2004–2009.

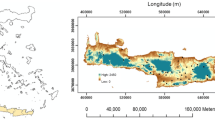
Geomorphological map of Crete showing the locations of the 54 stations (yellow circles) with rain gauges that are used in this study (Google Earth 2015). The triangles (green online) mark the two tallest peaks of Lefka Ori (left) and Oros Dikti (right). Chania, Rethimno, Heraklion, and Agios Nikolaos are the names of the capital cities in each prefecture
The remainder of this paper is structured as follows: The “Data and study area description” section introduces the dataset and briefly discusses relevant hydrological studies that focus on the island of Crete. The “Methodology” section presents the general methodology that we apply as well as the specific spatial model for annual precipitation. In the “Results” section, we describe the results of spatial analysis and investigate the temporal patterns of precipitation in the island. Finally, in the “Discussion and conclusions” section, we present conclusions and future directions of research.
Data and study area description
The study area is the island of Crete (Greece) in the southeastern part of the Mediterranean region; more specifically Crete is located in the Southern Aegean sea (GPS coordinates 35° 14′ 24.421″ N and 24° 48′ 33.369″ E). Crete is the largest island in Greece with an area of 8336 km2. The island has an elongated shape, spanning 260 km from East to West, while its width from North to South varies from a maximum of 60 km to a minimum of 12 km (Hellenic Statistical Authority 2014). Crete is similar in size to Cyprus and Corsica and ranks twelfth in size among the major European islands (Dahl 1991). The island comprises four administrative prefectures which are in the West to East direction Chania, Rethimno, Heraklion, and Lasithi.
Crete is one of the most mountainous islands of Europe: high mountain ranges cross the island from West to East, forming three large mountain complexes. The highest peaks range in altitude between 2148 and 2456 m. These peaks are interlaced with lower mountains and semi-mountainous areas. The island is in the semiarid bioclimatic zone with winters ranging between mild, warm and cold (Watrous 1982). The island’s climate features exhibit a transition from Mediterranean to semi-desert. Such geographical and climatic features are common in many Mediterranean areas. The few plains of the island which support the most important agricultural activities are located close to the coastal areas, where most of the population is also concentrated. The largest and most productive agricultural area is Messara valley in the South (Heraklion prefecture), followed by the valley of Ierapetra in the Southeast (Lassithi prefecture).
The agricultural sector is significant for Cretan economy, contributing 13% of the local Gross Domestic Product (GDP) (Chartzoulakis et al. 2001). The monitoring, availability and management of water resources are important issues for sustainable agriculture (Varouchakis 2012; Varouchakis and Hristopulos 2013b). During the past 30 years, the groundwater level in Messara has significantly decreased due to over-exploitation (Varouchakis and Hristopulos 2013a). Potential future climate change in the Mediterranean region, coupled with anticipated population increase and extensive agricultural activity are expected to threaten the island’s water resources.
A recent study of rainfall on Crete based on data from 52 stations from 1981 to 2014 identified a cyclical precipitation pattern with a period of almost 8 years, statistically significant correlation of the island’s rainfall variability with the North Atlantic Oscillation, and a decrease in the number of rainfall days by 15% compared with the early 1980s (Varouchakis et al. 2018). Accurate estimation of the spatial and temporal variability of precipitation is essential for an integrated water resources management plan that will help to reduce the risk of water deficits and desertification. At the same time, it will help to better understand the potential impact of global climate change on the island (Tzoraki et al. 2015).
The data used in this study are monthly measurements of precipitation in the period 1948–2012 from 54 rain gauges whose locations are shown in Fig. 1. The spatial distribution of the gauges is sparse and uneven: most of the stations are located in the prefecture of Heraklion, while only a few are located in the western and eastern parts of the island. The data were acquired from the Water Resources Department of the Prefecture of Crete (WRDPC). The dataset is sparse in space (small number of stations) but also in time: as evidenced in Fig. 13, a number of stations have incomplete measurements. Overall, about 30% of the total monthly measurements are missing. Geostatistical methods can be used to fill the gaps in space and time. Such reconstructions of the precipitation field help to improve our understanding of the variability of precipitation. We focus on the average annual precipitation. This choice is motivated by the sparsity of the dataset and the good fit of average annual precipitation with the Gaussian (normal) distribution. The Gaussian assumption facilitates modeling, since the standard geostatistical methods are based on the Gaussian probability distribution (Chilès and Delfiner 2012).
The average annual precipitation in Crete increases from East to West and from South to North. To show the East-West trend, we calculate the mean of the average annual precipitation over all stations in each prefecture and over the entire time span of the study. The mean values per prefecture (moving from East to West) are 723 mm in Lasithi, 700 mm in Heraklion, 990 mm in Rethimno, and 1279 mm in Chania. In addition to the East-West spatial gradient, precipitation varies significantly between lowland and mountainous areas: overall it increases with altitude at a rate that ranks among the highest in Greece (61 mm per 100 m according to the Ministry of Environment (2017)). Concerning temporal variations, monthly precipitation values peak in December or January and reach a minimum in July or August, when there is often zero precipitation in the low-lying areas of Crete (Region of Crete Information Bulletin 2002).
To incorporate elevation in the spatial model of precipitation, a Digital Elevation Model (DEM) of Crete was created in the software ArcGIS (ESRI 2011). The DEM was based on seven separate Shuttle Radar Topography Mission (SRTM) datasets downloaded from the National Aeronautics and Space Administration (NASA) Land Processes Distributed Active Archive Center (LP DAAC) (2015). These datasets are the result of a collaborative effort by NASA and the National Geospatial-Intelligence Agency (NGA), with the participation of the German and Italian space agencies, to generate a near-global DEM of the Earth based on radar interferometry. The data for Crete are SRTM Non-Void Filled elevation data, processed at NASA’s Jet Propulsion Laboratory (JPL) from raw C-band radar signals that are spaced at intervals of one arc-second (approximately 30 m). The derived product was edited by NGA to delineate and flatten water bodies, better define coastlines, remove spikes and wells, and fill small voids.
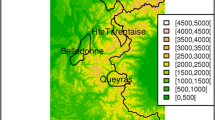
A single raster dataset was created in ArcGIS by joining the seven SRTMs that include parts of Crete on a 3601 × 3601 spatial grid. The reference horizontal datum is the World Geodetic System 84 (WGS84), and the vertical datum is the Earth Gravitational Model 1996 (EGM96) ellipsoid. We selected a subset of the raster data which covers the island of Crete but excludes grid cells located completely at sea. We imported this subset from GIS into Matlab and used spatial interpolation to obtain the DEM of Crete on a 531 × 1500 grid as shown in Fig. 2 with a 189 m × 225 m grid cell (corresponding to an area of 42500 m2).

Digital Elevation Model of Crete based on Shuttle Radar Topography Mission (SRTM) data downloaded from NASA’s Land Processes Distributed Active Archive Center. The elevation scale used in the colorbar under the DEM is in meters (color online)
Methodology
This section describes the spatial model of precipitation and the methodological steps used to estimate its parameters and to interpolate the data. The steps are summarized in the flowchart of Fig. 3. The methods involve multilinear spatial regression (to estimate the deterministic spatial trend of precipitation), variogram estimation and modeling (to estimate the spatial correlation of the residuals after the trend has been removed), spatial interpolation (to derive precipitation maps) and cross-validation (to assess the performance of the spatial model). These geostatistical methods provide a flexible framework for reliable estimation of the spatial variability of average annual precipitation (Grimes and Pardo-Igúzquiza 2010).

Flowchart summarizing the main methodological steps for spatial model estimation and mapping of average annual precipitation data
Spatial model of average annual precipitation
According to standard practice in precipitation modeling (Li et al. 2009), we view the average annual precipitation as a correlated Gaussian random field (Adler 2010), denoted by Pt(s), where the index t denotes the specific year, \(\mathbf {s} \in \mathcal {D} \subset \mathbb {R}^{3}\) is the location vector in three-dimensional space, and \(\mathcal {D}\) is the three-dimensional domain. The two-dimensional projection of \(\mathcal {D}\) coincides with the map of the island, while the vertical extent of \(\mathcal {D}\) is determined by the elevation.
We build the geostatistical model using stations where precipitation values are recorded for each month of the year. Thus, the stations used in general differ from year to year. The Gaussian assumption is reasonable since we focus on average annual precipitation (we confirm the Gaussian hypothesis in the “Results” section). The average annual precipitation random field is derived by averaging over fine-scale precipitation values which may follow some complicated probability distribution; however, their average converges to the Gaussian model by virtue of the Central Limit theorem (Anderson 1962).
Based on the above, we adopt the following random field model for the annual average precipitation
where mt(s) is the spatial trend, pt(s) is the correlated, Gaussian random fluctuation, and 𝜖t(s) is the uncorrelated (nugget) component with variance equal to \({\sigma _{0}^{2}}\).
The residual fluctuation field, ft(s), is obtained by subtracting the trend mt(s) from the precipitation field. Hence, it follows from (1) that
The ft(s) is assumed to be statistically homogeneous in the weak sense (Yaglom 1987), that is, its mean and covariance function are assumed to be independent of the location. This assumption is often used in practice, and as we discuss below it is justified based on the small size of the island.
The trend mt(s) involves the completely predictable component of the precipitation field which is linked to the topography of the area. The correlated statistically homogeneous term pt(s) involves spatial variations that can be partially predicted with a precision that depends on the data density close to the target point. Finally, the nugget component involves completely random (unpredictable) fluctuations. Ideally, the nugget term should be as small as possible in order to minimize the prediction uncertainty at unmeasured points.
The procedure for the spatial analysis of precipitation based on the model (1) involves the following steps: (i) estimation of the trend function using linear regression; (ii) estimation of the empirical variogram function of the residuals after trend removal, as defined in (4) below; (iii) fit of the empirical variogram to a theoretical variogram function defined in (6); (iv) spatial interpolation based on the model (1) to generate precipitation maps over the entire island and associated uncertainty estimates; (v) assessment of the model interpolation performance by means of cross-validation. These steps are explained in detail below.
Trend model
In an area that is geographically heterogeneous and traversed by mountainous ranges, geography and topography are key factors for the amount of precipitation received (Apaydin et al. 2011; Bárdossy and Pergam 2013; Daly et al. 1994; Portalés et al. 2010). We establish a relation of the average annual precipitation with the geographic coordinates (longitude, latitude) and elevation using multilinear regression (MLR). This approach leads to the following trend function
where the linear coefficients c0, t, c1, t, c2, t, c3, t depend on the specific year (denoted by t), x and y represent easting and northing coordinates (measured in meters), and z the elevation (measured in meters above sea level) of the point s. The units of the coefficient c0, t are mm, while the units of the remaining three coefficients are mm/m. Figure 4 shows the average annual precipitation trend in Crete for the year 1971. The optimal values of the \(\{ c_{i,t} \}_{i=1}^{3}\) and the MLR statistics of the trend model are presented in Table 1 (“Results” section).

Trend model of the average annual precipitation field in the year 1971 based on (3). The trend model coefficients are listed in Table 1. The coordinates x, y, z are in the Greek Geodetic Reference System (EGSA ’87), with x and y representing the easting and northing (measured in meters), and z the elevation (measured in meters above sea level). The scale of the horizontal precipitation colorbar is in mm
Omnidirectional variogram estimation
The spatial correlations of the residual field ft(s) (obtained from the precipitation field after trend removal) are determined by means of the variogram function (Chilès and Delfiner 2012). For a specific year t, the variogram is defined as the half variance of the increment field ft(s + r) − ft(s), where r is the distance vector or vector lag. The variogram measures the average increase of the deviation between the field values ft(s) and ft(s + r) as the distance ∥r∥ between them increases. Stochastic kriging methods are based on the variogram to predict the values of the random field at unmeasured points in space (Olea 1999; Cressie 1993; Chilès and Delfiner 2012).
The value of the variogram is 0 at zero lag (i.e., for ∥r∥ = 0) and increases with the distance. If the data contain a nugget (uncorrelated) exponent, the variogram has a discontinuous jump to a finite positive value (the nugget variance) as the lag increases slightly from zero. Such a nugget component is present in the precipitation data. For statistically homogeneous random fields the variogram tends towards a constant value known as sill.
The estimation of the variogram from data is often performed by means of the method of moments (Matheron 1963). Given a set of sampling points \(\{ \mathbf {s}_{i}\}_{i=1}^{N}\), and the respective values of the residuals at these points, the omnidirectional method-of-moments variogram estimator, \(\widehat {\gamma }_{f}(\mathbf {r})\) at the lag r is given by Chilès and Delfiner (2012)
In (4) 𝜗(⋅;r) is a function that groups together pairs of points si and sj such that the Euclidean norm of the distance vector ri, j = si −sj is approximately equal to r, that is, 𝜗(ri, j;r) = 1 if r − δr ≤∥ri, j∥ < r + δr and 𝜗(ri, j; r) = 0 otherwise. The width of the lag bins is specified by the lag tolerance δr > 0. Finally, \(n(r)={\sum }_{i=1}^{N} {\sum }_{j=1}^{N}\vartheta (\mathbf {s}_{i} -\mathbf {s}_{j};r )\) is the number of pairs with lag magnitude approximately equal to r. The function \(\widehat {\gamma }_{f}(r)\) is estimated for a set of possible lag values \(\{ r_{k} \}_{k=1}^{N_{c}}\), where Nc is an integer value that counts the number of lag classes and is typically between 10 and 20. The set of lag-variogram pairs \(\left \{ \left (r_{k}, \widehat {\gamma }_{f}(r_{k}) \right )\right \}_{k=1}^{N_{c}}\) defines the omnidirectional empirical or experimental variogram.
Anisotropy estimation
The omnidirectional variogram estimator (4) is based on the assumption that the residual precipitation field lack directionality, i.e., that the statistical features of the correlations are the same in every direction. If the correlation properties vary with direction, the variogram depends not only on r but also on the direction of the lag vector r. Two main types of anisotropy are typically used in geostatistical analysis: geometric and zonal (Chilès and Delfiner 2012). Zonal anisotropy implies that the variogram sill depends on the spatial direction. Zonal anisotropy has been observed in hourly rainfall data (Verworn and Haberlandt 2011). However, it is difficult to reliably establish the presence and properties of zonal anisotropy given the sparsity of the current dataset. In addition, in hourly data, the zonal anisotropy can be understood as the result of intense variability at this time scale; such variability is not expected in annual precipitation data due to the averaging effect.
Geometric anisotropy implies that the sill is the same in every direction, but the characteristic length of the variogram which determines the rate of approaching the sill depends on the direction of approach. A common assumption in geostatistics is that the main directions (the principal axes) of geometric anisotropy coincide with the coordinate axes (Isaaks and Srivastava 1989). Then, the variogram of the residuals is expressed as a function \(\gamma _{f} \left (\frac {r_{1}}{\xi _{1}}, \ldots , \frac {r_{d}}{\xi _{3}}\right )\) of dimensionless distances ri/ξi, where \(\{ \xi _{i} \}_{i=1}^{3}\) are the characteristic lengths in the corresponding directions (Goovaerts 1997). The method of moments can be extended to account for anisotropy (Chilès and Delfiner 2012; Olea 1999). Our analysis will focus on geometric anisotropy, in agreement with other geostatistical studies of precipitation (Atkinson and Lloyd 1998).
In order to estimate the geometric anisotropy, we transform the coordinate axes by means of the affine mapping \(s^{\prime }_{i} = \alpha _{i} s_{i} + b_{i}\), where s1 = x, s2 = y, s3 = z. The coefficients \(\{(b_{i}, \alpha _{i}) \}_{i=1}^{3}\) are estimated so that \(\mathcal {D} \to \mathcal {D}^{\prime }\) where \(\mathcal {D}^{\prime }\) fits inside a 100 × 100 × 100 domain. In the transformed domain \(\mathcal {D}^{\prime }\), we assume that the variogram function is transversely isotropic. This means that the spatial correlations are the same in every direction in the plane. Consequently, the planar characteristic length, ξ∥, is independent of the direction within the plane. On the other hand, the characteristic length ξ⊥ in the vertical direction is different than ξ∥. The transverse isotropy hypothesis is physically motivated: in the map plane, correlation differences in precipitation are mainly due to the elongated shape of the island and therefore captured by the affine transformation. In the vertical direction, the correlations are influenced by the steep mountain terrain of the island. The orographic factor is not completely accounted for by the transformation, thus leading to ξ∥ ≠ ξ⊥.
The normalized lag h between two points \(\mathbf {s}^{\prime }_{i}= (x^{\prime }_{i}, y^{\prime }_{i}, z^{\prime }_{i})\) and \(\mathbf {s}^{\prime }_{j}= (x^{\prime }_{j}, y^{\prime }_{j}, z^{\prime }_{j})\) in \(\mathcal {D}^{\prime }\) is then given by
Spartan variogram model
The empirical variogram function (4) is estimated at the discrete set of lag distances \(\{r_{k} \}_{k=1}^{N_{c}}\). In order to determine the spatial dependence at every possible lag distance r, we need to fit the empirical precipitation variogram with a theoretical variogram function (Chilès and Delfiner 2012). We use the Spartan variogram family (Hristopulos 2003, 2015; Hristopulos and Elogne 2007). The Spartan variogram functions have been applied to atmospheric pollution (žukovič and Hristopulos 2008), hydrological data (Varouchakis et al. 2012; Varouchakis and Hristopulos 2017), and environmental concentrations of gamma radiation (Elogne et al. 2008). The present study is the first application of Spartan variograms to meteorological data.
In contrast with classical geostatistical models that involve two parameters, i.e., the variance and the characteristic length, the Spartan variogram includes three parameters, i.e., the scale coefficient η0, the rigidity coefficient η1, and the characteristic length ξ. The three-parameter set bestows additional flexibility to the Spartan variogram, which includes both monotonically increasing and oscillatory functions depending on the value of η1. In contrast, the popular Whittle-Matérn variogram, which also involves three parameters, allows only monotonic increase without oscillations (Minasny and McBratney 2005). On the other hand, the Whittle-Matérn model permits controlling the degree of differentiability of the random field (Guttorp and Gneiting 2006). This is not possible with the Spartan variogram which is suitable for continuous but non-differentiable random fields (Hristopulos and Elogne 2007). However, the precipitation field is typically rough, and this property makes the Spartan variogram model a suitable candidate.
Variogram fitting
The Spartan variogram is obtained from the equation \(\gamma _{f}(h)= {\sigma _{f}^{2}} - C_{f}(h)\), where \({\sigma _{f}^{2}}\) is the variance, h is the normalized lag distance defined in (5), and Cf(h) is the Spartan covariance function. The latter in a three-dimensional domain is given by Hristopulos and Elogne (2007)
In the above expressions, for η1 > 2, the ω1,2 represent damping coefficients (inverse lengths) given by \(\omega _{1,2} = \sqrt {\left (\eta _{1}\mp |{\Delta }|\right )/2}\) where \({\Delta } = \sqrt {{\eta _{1}^{2}}-4}\). The coefficients \(\beta _{1,2} = \sqrt {|2\mp \eta _{1}|}/2\) for |η1| < 2 represent, respectively, the dimensionless characteristic wavenumber and the damping coefficient of the oscillatory covariance.
We fit the precipitation residuals (obtained by removing the trend from the data) with a linear combination of the Spartan and nugget effect variograms, that is,
The nugget effect introduces a discontinuous jump of the variogram at the origin equal to \({\sigma ^{2}_{0}} >0\), which represents the variability of the uncorrelated stochastic component in (1) and (2). The optimal fit between the empirical variogram and the theoretical model is determined by means of the method of least squares. Hence, the optimal parameters \((\eta _{0}^{\ast }, \eta _{1}^{\ast }, \xi _{\|}^{\ast }, \xi _{\bot }^{\ast }, {{\sigma ^{2}_{0}}}^{\ast } )\) of the variogram model are determined by means of
If ξ∥, ξ⊥ are specified, each lag set \(\{r_{k} \}_{k=1}^{N_{c}}\) corresponds to a set of normalized lags \(\{h_{k} \}_{k=1}^{N_{c}}\) based on (5). The characteristic lengths in the original system are calculated by means of ξx = ξ∥/α1, ξy = ξ∥/α2, ξz = ξ⊥/α3, where the αi (i = 1,2,3) are the coefficients of the affine mapping used to normalize the spatial domain.
Spatial interpolation of precipitation data
We use a stochastic interpolation method (known as kriging) to generate precipitation maps. Kriging refers to a family of best linear unbiased estimators (BLUE) (Matheron 1963; Yaglom 1987). Various kriging methods can be used to perform the spatial interpolation (Chilès and Delfiner 2012). Regression kriging (RK) combines the use of a trend function with a stochastic model for the residuals. The latter is interpolated using the method of ordinary kriging (OK) (Rivoirard 2002; Hengl et al. 2007). RK is suitable for the interpolation of the average annual precipitation which is based on the model (1). RK has been successfully used to model the spatial variability in tropical rainforest soils (Yemefack et al. 2005), to map leaf area index (LAI) (Berterretche et al. 2005), to model the spatial distribution of human diseases (Pleydell et al. 2004), and to map groundwater levels (Varouchakis et al. 2012). The RK method incorporates a trend model for the dependent variable (e.g., precipitation) in terms of auxiliary variables (e.g., topographic parameters) (Hengl et al. 2007).
The theory of ordinary kriging assumes that the data are derived from a random field which (i) follows the Gaussian probability distribution and (ii) is statistically homogeneous or has statistically homogeneous increments. The estimates of the field at unmeasured points are formulated as linear combinations of the data with linear weights that are determined by the optimality criterion, i.e., the minimization of the mean square error. In addition to the optimal estimate at each location, OK also generates an estimate of uncertainty based on the standard deviation of the estimation error (also known as kriging standard deviation).
In order to apply RK interpolation, the residuals should satisfy the OK conditions of Gaussian distribution and statistical homogeneity. As shown below, the residuals of the average annual precipitation field follow approximately the Gaussian distribution (cf. Fig. 5). Given the small size of Crete, we assume that the residuals are a statistically homogeneous field (i.e., the statistical properties of average annual precipitation are invariant in space). The hypothesis of statistical homogeneity agrees with the usual practice for small geographical areas (Higdon et al. 1999). A reliable analysis of statistical non-homogeneity is not possible with the limited number of available data anyhow. We conclude that the conditions for the application of ordinary kriging are plausible for the average annual precipitation data in Crete.

Empirical histogram for the average annual precipitation residuals in the year 1971 (bins with blue edges). Fits of the empirical histogram to probability density function models include the Student’s t (red line), the logistic (blue dotted line), the generalized extreme value (brown line), and the normal (Gaussian, gray line) models. The histogram is based on the precipitation data from 49 stations scattered around Crete. The horizontal axis is in mm
Spatial model validation
Cross-validation (CV) refers to a suite of methods used to assess the predictive performance of spatial models. The central idea is to split the data into two disjoint sets. The first set (the training sample) is used for estimating the parameters of the spatial model, while the remaining data (the validation sample) is used to evaluate the predictive performance of the model (Grossman et al. 2010). The performance assessment involves various statistical measures (e.g., root mean square error, correlation coefficient, etc.) that compare the values predicted by the spatial model at the validation locations with the true values. Such measures include (Isaaks and Srivastava 1989) the bias or mean error (ME), the mean absolute error (MAE), the mean absolute relative error (MARE), the root mean square error (RMSE), the root mean square relative error (RMSRE), Pearson’s linear correlation coefficient (RP), and the Spearman (rank) correlation coefficient (RS) (see Appendix for the definitions).
One or multiple partitions of the data into training and validation sample(s) can be used. Various strategies for splitting the data into training and validation sets are reviewed in Arlot and Celisse (2010). A particular strategy used in spatial studies is leave-one-out cross-validation (LOO-CV) (also known as delete-one CV (Li 1987), ordinary CV (Stone 1974; Burman 1989) or simply CV (Efron 1983; Li 1987)). In LOO-CV the training set contains N − 1 values and the validation set contains a single value. All N partitions of the N data points into training and validation sets are used.
Results
First, we present a detailed analysis of the annual average precipitation spatial model in 1971. The specific year is selected because most (49 out of 54) stations report monthly data during this year. We then generate maps of the interpolated precipitation field and the associated uncertainty. This is followed by a sequence of precipitation maps for six consecutive years (2004–2009) that explore temporal patterns. We briefly discuss the results of spatial analysis for other years for which detailed analysis is not shown. Next, we focus on the analysis of temporal trends for coarse-scale (West versus East) precipitation averages.
Interpolation of the average annual precipitation field for the year 1971
We use the spatial model defined in (1) after estimating its components as described below.
Precipitation trend model
The coefficients of the precipitation trend model in 1971 are shown in Table 1. The p values, also listed in the table, represent the probabilities of the null hypotheses (i.e., that the true value of the respective coefficient is zero). These values are low for all the coefficients (less than 2 × 10− 5), which implies that the null hypothesis can be rejected and the values of the coefficients are statistically significant. The coefficient of determination R2 for the model is 0.74. This means that 74% of the total variance in the data is explained by the trend model, demonstrating the importance of the geography and topography in the average annual precipitation.
A volumetric plot of the trend function is shown in Fig. 4. The dependence on the elevation as well as the North-South and West-East gradients is clearly visible in the plot. The histogram of the precipitation residuals is shown in Fig. 5 along with fits to known probability density function (pdf) models. The latter include the normal, Student’s t, logistic, and generalized extreme value distributions. As evidenced in the plots, the residuals can approximately be considered as Gaussian.
Validation of the Gaussian hypothesis for the residuals
The summary statistics of the annual precipitation data and the residuals (obtained after removing the trend) in 1971 are shown in Table 2. They include the mean value, the minimum and maximum values, the standard deviation, the coefficient of variation (ratio of the standard deviation over the mean), the skewness (coefficient of asymmetry) and the kurtosis. For the residuals, the near-zero skewness, the kurtosis which is close to the Gaussian value of 3, and the successful fitting of the histogram with the normal distribution (see Fig. 5) support the assumption that the residuals are normally distributed.
Variogram estimation and modeling
The empirical variogram is estimated from the residuals based on the method of moments. Fitting to the Spartan variogram model allows estimating the optimal Spartan variogram parameters η0, η1 and characteristic lengths ξ∥ and ξ⊥, as well as σ0. The nugget variance is equal to \({\sigma _{0}^{2}}=1.7269\times 10^{2}~\text {mm}^{2}\), the scale parameter η0 is 4.3331 × 105 mm2, the shape parameter is η1 = 8.4635, while ξ∥ = 12.5997 on the horizontal plane, and ξ⊥ = 4.0450 in the vertical direction. The shape parameter η1 is dimensionless. The characteristic lengths ξ∥ and ξ⊥ are also dimensionless since the study domain is normalized to a 100 × 100 × 100 parallelepiped. By inverting the normalization, we obtain the characteristic lengths in the original coordinate system as ξx = 35.7 km, ξy = 15.1 km, and ξz = 98.6 m. These values reflect the elongated shape of the island (cf. Fig. 2) and the rapid change in the precipitation with the elevation.
Map of precipitation field
We generate continuous maps of the average annual precipitation in Crete using the spatial model (1) for the precipitation field Pt(s) and the dataset \(\left \{ P_{t_{j}}(\mathbf {s}_{i}) \right \}_{i=1}^{N}\), where tj denotes the target year. The precipitation values at the nodes um, m = 1,…, M of the map grid are RK-derived estimates \(\widehat {P}_{t_{j}}(\mathbf {u}_{m})\), generated by means of the predictive equation
where mt(um) is the value of the trend function (3) (with the coefficients listed in Table 1), and \(\widehat {p}_{t}(\mathbf {u}_{m})\) is the estimated residual field based on Ordinary Kriging and the optimal Spartan variogram.
The map of average annual precipitation in 1971 is shown in Fig. 6. It features three areas, which coincide with the three mountain ranges shown in the DEM in Fig. 2, where the estimated precipitation is overall higher than in other parts of the island. More specifically, at Lefka Ori (Chania prefecture, western Crete) the highest estimate is 2331 mm, on mountain Psiloritis (prefecture of Rethimno, central Crete) the highest estimate is 2060 mm, while on mountain Dicti (Lasithi prefecture, eastern Crete) the highest estimate is 1781 mm. This pattern is in agreement with the topographic dependence on elevation and the overall trend of West-East and North-South negative precipitation gradients in Crete.

Estimated average annual precipitation in 1971, based on the spatial model of precipitation (8). The Cartesian coordinates are measured in the Greek Geodetic System (EGSA ’87), with the horizontal axis representing easting and the vertical axis representing northing (both axes are measured in meters). The scale of the precipitation colorbar ranges from 0 to the maximum average annual precipitation (measured in millimeters) during the entire time period of the study
Estimation of precipitation uncertainty
We estimate the uncertainty of the precipitation map shown in Fig. 6 based on the kriging coefficient of variation (COV). This is defined as the ratio of the kriging standard deviation divided by the kriging estimate and provides a measure of relative uncertainty with respect to the estimated precipitation level. The spatial distribution of the kriging COV (shown in Fig. 7) reflects its implicit dependence on the data through the variogram model and the sampling density in each area. Locations of high uncertainty are prime candidates for installing additional gauges, especially if they occur in areas of high agricultural activity or increased water usage in general. The highest COVs (in excess of 20%) occur in southeastern, lowland areas with low values of average annual precipitation. Even though the kriging standard deviation in these areas is lower than in other parts of Crete, the low precipitation estimates result in higher COV values. Hence, the increased COV can be attributed both to the sparsity of measuring stations along the coastline and to the overall lower precipitation in eastern Crete. The valley of Ierapetra, one of the most important agricultural regions of the island, is found in the high-COV area.

Estimated coefficient of variation (see colorbar on the right) of the average annual precipitation in 1971, based on the ratio of the kriging standard deviation over the respective kriging estimate. The Cartesian coordinates are measured in the Greek Geodetic System (EGSA ’87). The horizontal axis represents easting and the vertical axis represents northing coordinates. Both axes are measured in meters
Spatial model performance assessment
We assess the performance of the precipitation predictions (8) with LOO-CV. The values of the CV measures are listed in Table 3. The mean error of 2.55 mm implies the low (practically zero) bias of the predictions. Both Pearson’s linear correlation (≈ 87%) and Spearman’s rank coefficient (≈ 88%) demonstrate the high correlation between the estimated precipitation and the data. The mean absolute relative error stands at ≈ 15%. This is due to the high spatial variability of precipitation and the sparsity of the sampling network. The maximum value of the absolute prediction error is 337.75 mm. The discrepancy between the measured and predicted values is due to the smoothing effect of kriging and the Gaussian distribution assumption for the residuals. These two factors imply that the predictive (8) cannot adequately capture the spatial extremes of precipitation. On the other hand, the difference between the minimum observation and the minimum prediction is small, i.e., 0.13 mm.
The cross-validation results are further investigated by means of the histogram plots in Figs. 8 and 9. Figure 8 compares the histogram of the precipitation data with the LOO-CV predictions and demonstrates good agreement between the two sets of values. However, the sample data contain one extreme value which is not predicted well. On the other hand, the highest predicted values by means of (8), i.e., 2331 mm, 2060 mm, and 1781 mm (see Fig. 6), do not appear on the histogram of LOO-CV predictions. These extreme values are predicted at mountain tops, where measurements are not available for validation.

Histograms of the average annual precipitation data (light-colored bars) in 1971 and the respective RK-derived leave-one-out cross-validation predictions at each point, based on the remaining N − 1 points (dark-colored bars). The RK predictions are based on the spatial model (8). The units of precipitation on the horizontal axis are in mm

Histogram of leave-one-out cross-validation errors for the average annual precipitation of the year 1971 in Crete. The cross-validation error is defined as the difference between the RK-derived estimate of the field at each point (based on the values at the remaining N − 1 points) minus the true precipitation value. The units of precipitation on the horizontal axis are in mm
The histogram of the LOO-CV prediction errors (i.e., the difference between the LOO-CV predictions and the true values) is shown in Fig. 9. The plot shows that most errors are within the range of [− 200,200] mm. Two errors have values that exceed 200 mm in absolute value. The highest error value is obtained for the Askyfou station, which is situated on a mountain plateau between two high mountain peaks. At this location, the trend, which is based on elevation, is likely to underestimate true precipitation, thus leading to a higher error.
Temporal patterns of precipitation
To explore the temporal variability of the average annual precipitation field, we present a sequence of maps during the 6-year period 2004–2009 in Figs. 10 and 11. These maps show no evidence of systematic decrease in the annual precipitation during the short six-year period. However, there is significant inter-annual variability, even between consecutive years (Fig. 11).

Estimated average annual precipitation in Crete from 2004 until 2006, based on Eq. 8 and regression kriging. The Cartesian coordinates are measured in the Greek Geodetic System (EGSA ’87). The horizontal axis represents easting and the vertical axis northing coordinates. Both axes are measured in meters. The scale of the colorbar is in mm

Estimated average annual precipitation in Crete from 2007 until 2009, based on (8) and regression kriging. The Cartesian coordinates are measured in the Greek Geodetic System (EGSA ’87). The horizontal axis represents easting and the vertical axis northing coordinates. Both axes are measured in meters. The scale of the colorbar is in mm
In spite of the overall changes in magnitude, the main spatial patterns of precipitation, i.e., the dependence on the elevation and the decreasing gradient from West to East are present in all maps. We do not display maps for the years following 2009, because they are based on data from very few stations and are thus highly uncertain.
Next, we focus on the global average annual precipitation over all the stations Nt that report monthly data in the specific year denoted by t, i.e.,
where Pt(si) is the average annual precipitation at the location si.
We investigate whether \(\overline {P}_{t}\) shows a temporal trend in global average annual precipitation. We fit a linear regression model to the \(\overline {P}_{t}\) values using ordinary least squares (OLS). We thus obtain \(\overline {P}_{t} = m_{t} + \epsilon _{t}\) where mt = 1051.3 − 0.1t is the resulting linear trend model. The time t takes values t = 1960, 1961, … , 2011, and 𝜖t represents the residuals. The linear trend and the data are shown in Fig. 12). The residuals are uncorrelated (see Appendix) thus justifying the use of OLS.

Linear regression model of the global average annual precipitation in Crete, \(\overline {P}_{t}\), defined by means of (9), versus time. The plot does not offer clear evidence of a temporal trend during the study period. The estimated decreasing trend \(\overline {P}_{t} = 1051.3 -0.1 t\), for t = 1960, 1961, … , 2011 (shown by the continuous red line) is not statistically significant. The dotted lines represent the limits of the 95% confidence interval for the trend estimate at each time
The equation for mt seems to indicate a decreasing trend with a negative slope of 0.1 mm (corresponding to 0.01% decrease) per year. However, the respective p value for the regression model is equal to 0.95, which means that the observed pattern can be explained by random fluctuations around a constant value with probability 95%. Thus, the null hypothesis (constant \(\overline {P}_{t}\)) cannot be rejected, leading to the conclusion that the estimated trend is not statistically significant.
This result agrees with conclusions drawn from various GCMs, according to the Intergovernmental Panel on Climate Change (IPCC) (Hartmann et al. 2013). IPCC reports an overall increase in precipitation (marked by a statistically significant trend) from 1901 to 2008 in mid-latitudes (30° N to 60° N). However, for the shorter period (1951–2008), which is closer to the period of our dataset, there is no significant evidence for a trend.
A recent study estimated a decrease of the annual precipitation in Crete under various climate scenarios (Vrochidou et al. 2013). This study uses GCMs to extract precipitation estimates based on three different Representative Concentration Pathways (RCPs). RCPs are scenarios that represent greenhouse gas (GHG) concentration trajectories for the period 2000–2099. These scenarios are used in the IPCC fifth Assessment Report (AR5) issued in 2014. Each scenario is characterized by a different trend model for the GHG until the end of the century. In RCP2.6 and RCP4.5, the GHG concentration follows a trend model that peaks around 2010–2020 (for RCP2.6) and around 2040 (for ECP4.5), followed by a declining trend until the end of the century. In contrast, in RCP8.5 the GHG emissions follow a trend model with positive slope for the entire period, leading to rising emissions over the entire time period. The study by Vrochidou et al. (2013) applies the three RCPs for the time period 1973–2099 to estimate the precipitation on the island. The results show a decrease in the annual precipitation amount by 6% (RCP2.6), 17% (RCP4.5) and 26% (for RCP8.5) over the last 34 years (2065–2099). In light of these predictions, it is necessary to closely monitor the average annual rainfall on Crete. In addition, precipitation patterns on smaller time scales should be investigated since they impact the estimation of runoff and storage in underground water reservoirs.
Discussion and conclusions
This study analyzes spatial and temporal patterns of average annual precipitation in Crete for the period 1948–2011 using a detailed spatial model and the method of regression kriging for interpolation. The precipitation exhibits a spatial gradient, with values in the West exceeding those in the East by about 450 mm (this number is calculated as an average over all the values in the study period). We also find a positive correlation between elevation and precipitation in agreement with previous studies (Naoum and Tsanis 2003; Varouchakis et al. 2018). Topographic and geographic parameters are strongly correlated with precipitation and affect both its intensity and its spatial distribution. This result is also in agreement with other studies in mountainous areas of the Mediterranean region (Vicente-Serrano et al. 2003). We constructed a linear regression model for the spatial trend of precipitation using two geographical parameters (latitude and longitude) and one topographic parameter (elevation) based on a high-resolution DEM of Crete. The coefficient of determination R2 (explained variance) for the trend model ranges between 46 and 83% for all the years in the study period. In addition, we treated the regression residuals as a Gaussian random field with correlations characerized by geometric anisotropy and modeled by the recently proposed Spartan variogram model. The use of anisotropy and the Spartan variogram model are novel elements that increase the flexibility of the spatial model.
The full spatial model for each year specifies the average annual precipitation at each location in terms of the DEM-based trend function, the available data, and the optimal Spartan variogram model of the correlated residuals. The estimates of the precipitation at unmeasured locations are obtained by means of regression kriging. This method combines the trend model predictions with estimates of the spatial fluctuations. The latter are based on ordinary kriging of the data (residuals) at the monitoring stations. We opted for a kriging-based method since comparative studies have established the advantages of such methods for interpolation of scattered data (Li and Heap 2014; Varouchakis and Hristopulos 2013a). In particular, regression kriging with a topograhic trend performs better than ordinary kriging (Vicente-Serrano et al. 2003; Varouchakis et al. 2018). We confirm the predictive performance of the spatial model of average annual precipitation in Crete by means of leave-one-out cross-validation. Another novel element of this research is that the uncertainty of the estimates is quantified by means of the kriging coefficient of variation, and areas of high relative uncertainty are identified.
Our analysis of the data from Crete for the period 1948–2011 finds no evidence for a statistically significant trend in the global average annual precipitation. This result is in agreement with an estimate of the Intergovernmental Panel on Climate Change for lack of a statistically significant precipitation trend in the similar period 1951–2008 for mid-latitude (30° N to 60° N) regions (Hartmann et al. 2013).
The proposed geostatistical approach can be used as an integrated modeling tool in a comprehensive water resources management plan for the island. It provides quantitative estimates of the average annual precipitation level at every location and determines locations of high uncertainty, where the addition of monitoring gauges is advisable. A spatially denser network and more complete records of precipitation will improve the results of the geostatistical analysis overall. In particular, additional gauges are needed in the western part (prefecture of Chania) and the eastern part (prefecture of Lasithi) of the island. The estimates in the low-precipitation coastal areas in the South of the Lasithi prefecture exhibit higher relative uncertainty (around 20%), than other locations and are therefore the primary target for additional monitoring.
A natural evolution of the current work is to extend the methodology presented herein by constructing a joint spatiotemporal model of precipitation. In order to resolve the precipitation at monthly or sub-monthly time scales, the statistical model will need to be modified so that the probability distribution can also handle zero precipitation values. A possible solution could involve the generalized Pareto distribution model proposed by Baxevani and Lennartsson (2015). This approach would allow extending the geostatistical model to finer time resolutions (i.e., monthly or daily scales).
Data with finer (sub-daily) temporal resolutions will allow investigating the duration and intensity of precipitation events in addition to the total amount of precipitation. Moreover, they will allow the statistical analysis of extreme precipitation events using methods for spatial and spatiotemporal extremes (Davison et al. 2013). We are planning to combine the ground-based data with reanalysis data in order to enhance the density of the data record. Reanalysis data will also improve the spatial and temporal resolutions. This will open a new window for investigating the possible impact of climate change on precipitation at shorter time scales. In addition, it will enable construction of a multivariate precipitation model, e.g., Vicente-Serrano et al. (2003), that will incorporate other meteorological variables available in the reanalysis database.
References
Adler, R. (2010). The geometry of random fields. Philadelphia, PA, USA: Society of Industrial and Applied Mathematics.
Ailliot, P., Allard, D., Monbet, V., Naveau, P. (2015). Stochastic weather generators: an overview of weather type models. Journal de la Société Française de Statistique, 156, 101–113.
Anderson, T. (1962). An introduction to multivariate statistical analysis. New York: Wiley.
Apaydin, H., Anli, A.S., Ozturk, F. (2011). Evaluation of topographical and geographical effects on some climatic parameters in the Central Anatolia Region of Turkey. International Journal of Climatology, 31, 1264–1279.
Arlot, S., & Celisse, A. (2010). A survey of cross-validation procedures for model selection. Statistics Surveys, 4, 40–79.
Atkinson, P.M., & Lloyd, C. (1998). Mapping precipitation in Switzerland with ordinary and indicator kriging. Special issue: spatial interpolation comparison 97. Journal of Geographic Information and Decision analysis, 2, 72–86.
Bárdossy, A., & Pergam, G. (2013). Interpolation of precipitation under topographic influence at different time scales. Water Resources Research, 49, 4545–4565.
Baxevani, A., & Lennartsson, J. (2015). A spatiotemporal precipitation generator based on a censored latent Gaussian field. Water Resources Research, 51, 4338–4358.
Berterretche, M., Hudak, A.T., Cohen, W.B., Maiersperger, T.K., Gower, S.T., Dungan, J. (2005). Comparison of regression and geostatistical methods for mapping leaf area index (LAI) with landsat ETM+ data over a boreal forest. Remote Sensing of Environment, 96, 49–61.
Bostan, P., Heuvelink, G.B., Akyurek, S. (2012). Comparison of regression and kriging techniques for mapping the average annual precipitation of Turkey. International Journal of Applied Earth Observation and Geoinformation, 19, 115–126.
Brezonik, P.L., & Stadelmann, H. (2002). Analysis and predictive models of stormwater runoff volumes, loads, and pollutant concentrations from watersheds in the twin cities metropolitanarea, Minnesota, USA. Water Research, 36, 1743–1757.
Burman, P. (1989). A comparative study of ordinary cross-validation, υ-fold cross-validation and the repeated learning-testing methods. Biometrika, 76, 503–514.
Chartzoulakis, K.S., Paranychianakis, N.V., Angelakis, A.N. (2001). Water resources management in the island of Crete, Greece, with emphasis on the agricultural use. Water Policy, 3, 193–205.
Chilès, J.P., & Delfiner, P. (2012). Geostatistics: modeling spatial uncertainty. Hoboken: Wiley.
Cressie, N. (1993). Statistics for spatial data. Wiley series in probability and statistics (revised edition ed.) New York: Wiley.
Dahl, A. (1991). Island directory, UNEP Regional SeasDirectories and Bibliographies No 35. Nairobi: UNEP.
Daly, C., Neilson, R.P., Phillips, D. (1994). A statistical-topographic model for mapping climatological precipitation over mountainous terrain. Journal of Applied Meteorology, 33, 140–158.
Davison, A., Huser, R., Thibaud, E. (2013). Geostatistics of dependent and asymptotically independent extremes. Mathematical Geosciences, 45, 511–529.
Eden, J.M., & Widmann, M. (2014). Downscaling of GCM-simulated precipitation using model output statistics. Journal of Climate, 27, 312–324.
Efron, B. (1983). Estimating the error rate of a prediction rule: improvement on cross-validation. Journal of the American Statistical Association, 78, 316–331.
Elogne, S.N., Hristopulos, D.T., Varouchakis, E. (2008). An application of Spartan spatial random fields in environmental mapping: focus on automatic mapping capabilities. Stochastic Environmental Research and Risk Assessment, 22, 633–646.
ESRI. (2011). ArcGIS Desktop: Release 10. Environmental Systems Research Institute Redlands, CA. Online: http://www.esri.com.
Flaounas, E., Drobinski, P., Vrac, M., Bastin, S., Lebeaupin-Brossier, C., Stéfanon, M., Borga, M., Calvet, J. (2013). Precipitation and temperature space–time variability and extremes in the mediterranean region: evaluation of dynamical and statisticaldownscaling methods. Climate Dynamics, 40, 2687–2705.
Flecher, C., Naveau, P., Allard, D., Brisson, N. (2010). A stochastic daily weather generator for skewed data. Water Resources Research, 46, W07519.
Georgakakos, K.P., & Bras, R. (1984). A hydrologically useful station precipitation model: 1. Formulation. Water Resources Research, 20, 1585–1596.
Google Earth. (2015). Crete island, Greece. SIO, NOAA, U.S. Navy, NGA, GEBCO. DigitalGlobe 2015. Online: http://www.earth.google.com.
Goovaerts, P. (1997). Geostatistics for natural resources evaluation. Applied geostatistics series. Oxford: Oxford University Press.
Goovaerts, P. (2000). Geostatistical approaches for incorporating elevation into the spatial interpolation of rainfall. Journal of Hydrology, 228, 113–129.
Grimes, D.I.F., & Pardo-Igúzquiza, E. (2010). Geostatistical analysis of rainfall. Geographical Analysis, 42, 136–160.
Grossman, R., Seni, G., Elder, J., Agarwal, N., Liu, H. (2010). Ensemble methods in data mining: improving accuracy through combining predictions. Morgan Claypool.
Guttorp, P., & Gneiting, T. (2006). Studies in the history of probability and statistics XLIX: on the matérn correlation family. Biometrika, 93, 989–995.
Haberlandt, U. (2007). Geostatistical interpolation of hourly precipitation from rain gauges and radar for a large-scale extreme rainfall event. Journal of Hydrology, 332, 144–157.
Hartmann, D.L., Klein Tank, A.M.G., Rusticucci, M., Alexander, L.V., Bronnimann, S., Charabi, Y., Dentener, F.J., Dlugokencky, E.J., Easterling, D.R., Kaplan, A., Soden, B.J., Thorne, P.W., Wild, M., Zhai, P. (2013). Observations: atmosphere and surface. In T.F. Stocker, D. Qin, G.-K. Plattner, M. Tignor, S.K. Allen, J. Boschung, A. Nauels, Y. Xia, V. Bex, P.M. Midgley (Eds.) Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change chapter 2 (pp. 159–254). Cambridge: Cambridge University Press.
Hatzianastassiou, N., Katsoulis, B., Pnevmatikos, J., Antakis, V. (2008). Spatial and temporal variation of precipitation in greece and surrounding regions based on global precipitation climatology project data. Journal of Climate, 21, 1349–1370.
Hellenic Statistical Authority. (2014). Demographic and social characteristics of the resident population of greece according to the 2011 population - housing census revision of 20/3/2014. Online: http://www.statistics.gr/en/2011-census-pop-hous http://www.statistics.gr/en/2011-census-pop-hous.
Hengl, T., Heuvelink, G.B.M., Rossiter, D. (2007). About regression-kriging: from equations to case studies. Computers Geosciences, 33, 1301–1315.
Higdon, D., Swall, J., Kern, J. (1999). Non-stationary spatial modeling. Bayesian Statistics, 6, 761–768.
Hristopulos, D. (2003). Spartan Gibbs random field models for geostatistical applications. SIAM Journal on Scientific Computing, 24, 2125–2162.
Hristopulos, D. (2015). Covariance functions motivated by spatial random field models with local interactions. Stochastic Environmental Research and Risk Assessment, 29, 739–754.
Hristopulos, D.T., & Elogne, S. (2007). Analytical properties and covariance functions for a new class of generalized Gibbs random fields. IEEE Transactions on Information Theory, 53, 4667–4679.
Hutchinson, M.F., Nix, H.A., McMahon, J.P., Ord, K.D. (1996). The development of a topographic and climate database for Africa. In Third International Conference/Workshop on Integrating GIS and Environmental Modeling; Santa Fe, NM. Santa Barbara: national center for geographic information analysis, University of California (pp. 210–222).
Isaaks, E., & Srivastava, R. (1989). Applied Geostatistics. Oxford: Oxford University Press.
Kaper, H., & Engler, H. (2013). Mathematics and Climate. Philadelphia, PA, USA: Society of Industrial and Applied Mathematics.
Katz, R. (1977). Precipitation as a chain-dependent process. Journal of Applied Meteorology, 16, 671–676.
Keyantash, J. (2018). The climate data guide: standardized precipitation index (SPI) National Center for Atmospheric Research Staff (Ed.) Last modified 07 Aug 2018. Retrieved from https://climatedataguide.ucar.edu/climate-data/standardized-precipitation-index-spi.
Kyriakidis, P.C., Kim, J., Miller, N. (2001). Geostatistical mapping of precipitation from rain gauge data using atmospheric and terrain characteristics. Journal of Applied Meteorology, 40, 1855–1877.
Land Processes Distributed Active Archive Center (LP DAAC). (2015). USGS EarthExplorer. Online: http://lpdaac.usgs.gov.
Li, B., Murthi, A., Bowman, K.P., North, G.R., Genton, M.G., Sherman, M. (2009). Statistical tests of Taylor’s hypothesis: an application to precipitation fields. Journal of Hydrometeorology, 10, 254–265.
Li, J., & Heap, A. (2014). Spatial interpolation methods applied in the environmental sciences: a review. Environmental Modelling Software, 53, 173–189.
Li, K. (1987). Asymptotic optimality for c p, c l, cross-validation and generalized cross-validation: discrete index set. Annals of Statistics, 15, 958–975.
Longobardi, A., Buttafuoco, G., Caloiero, T., Coscarelli, R. (2016). Spatial and temporal distribution of precipitation in a Mediterranean area (Southern Italy). Environmental EarthSciences, 75, 189–208.
Ly, S., Charles, C., Degre, A. (2011). Geostatistical interpolation of daily rainfall at catchment scale: the use of several variogram models in the Ourthe and Ambleve catchments, Belgium. Hydrology and Earth System Sciences, 15, 2259–2274.
Matheron, G. (1963). Principles of geostatistics. Economic Geology, 58, 1246–1266.
McKee, T., Doesken, N., Kleist, J. (1993). The relationship of drought frequency and duration to time scales. In Proceedings of the 8th Conference on Applied Climatology, Annaheim, CA. Boston, USA, American Meteorological Society (pp. 179–184).
Minasny, B., & McBratney, A. (2005). The matérn function as a general model for soil variograms. Geoderma, 128, 192–207.
Ministry of Environment, Energy and Climate Change. (2017). 1st revision of the river basin management plan of the water district of Crete. (in Greek).
Moral, F. (2010). Comparison of different geostatistical approaches to map climate variables: application to precipitation. International Journal of Climatology, 30, 620–631.
Naoum, S., & Tsanis, I. (2003). Temporal and spatial variation of annual rainfall on the island of Crete, Greece. Hydrological Processes, 17, 1899–1922.
Nastos, P.T., Politi, N., Kapsomenakis, J. (2013). Spatial and temporal variability of the aridity index in Greece. Atmospheric Research, 119, 140–152.
Naveau, P., Toreti, A., Smith, I., Xoplaki, E. (2014). A fast nonparametric spatio-temporal regression scheme for generalized Pareto distributed heavy precipitation. Water Resources Research, 50, 4011–4017.
New, M., Hulme, M., Jones, P. (2000). Representing twentieth-century space-time climate variability. Part II: development of 1901-96 monthly grids of terrestrial surface climate. Journal of Climate, 13, 2217—2238.
Olea, R. (1999). Geostatistics for engineers and earth scientists. New York: Springer.
Palmer, W. (1965). Meteorological drought. Technical report research paper No45 US Weather Bureau Washington, DC.
Pardo-Igúzquiza, E. (1998). Comparison of geostatistical methods for estimating the areal average climatological rainfall mean using data on precipitation and topography. International Journal of Climatology, 18, 1031–1047.
Park, N.-W., Kyriakidis, P., Hong, S. (2017). Geostatistical integration of coarse resolution satellite precipitation products and rain gauge data to map precipitation at fine spatial resolutions. Remote Sensing, 9, 255–273.
Pleydell, D.R.J., Raoul, F., Tourneux, F., Danson, F.M., Graham, A.J., Craig, P.S., Giraudoux, P. (2004). Modelling the spatial distribution of Echinococcus multilocularis infection in foxes. Acta Tropica, 91, 253–265.
Portalés, C., Boronat, N., Pardo-Pascual, J.E., Balaguer-Beser, A. (2010). Seasonal precipitation interpolation at the Valencia region with multivariate methods using geographic and topographic information. International Journal of Climatology, 30, 1547–1563.
Region of Crete Information Bulletin. (2002). Region of Crete (2002) sustainable management of water resources in Crete.(in Greek).
Rivoirard, J. (2002). On the structural link between variables in kriging with external drift. Mathematical Geology, 34, 797–808.
Semenov, M.A., Brooks, R.J., Barrow, E.M., Richardson, C. (1998). Comparison of the WGEN and LARS-WG stochastic weather generators for diverse climates. Climate Research, 10, 95–107.
Stone, M. (1974). Cross-validatory choice and assessment of statistical predictions. Journal of the Royal Statistical Society Series B, 36, 111–147.
Strauch, M., Kumar, R., Eisner, S., Mulligan, M., Reinhardt, J., Santini, W., Vetter, T., Friesen, J. (2017). Adjustment of global precipitation data for enhanced hydrologic modeling of tropical Andean watersheds. Climatic Change, 141, 547–560.
Tessier, Y., Lovejoy, S., Schertzer, D. (1993). Universal multifractals: theory and observations for rain and clouds. Journal of Applied Meteorology, 32, 223–250.
Tobin, C., Nicotina, L., Parlange, M.B., Berne, A., Rinaldo, A. (2011). Improved interpolation of meteorological forcings for hydrologic applications in a Swiss Alpine region. Journal of Hydrology, 401, 77–89.
Tsakiris, G., Pangalou, D., Vangelis, H. (2007). Regional drought assessment based on the Reconnaissance Drought index (RDI). Water Resources Management, 21, 821–833.
Tushaus, S.A., Posselt, D.J., Miglietta, M.M., Rotunno, R., Delle Monache, L. (2015). Bayesian exploration of multivariate orographic precipitation sensitivity for moist stable and neutral flows. Monthly Weather Review, 143, 4459–4475.
Tzoraki, O., Kritsotakis, M., Baltas, E. (2015). Spatial water use efficiency index towards resource sustainability: application in the island of Crete, Greece. International Journal of Water Resources Development, 31, 669–681.
Varouchakis, E. (2012). Geostatistical analysis and space-time models of aquifer levels: application to mires hydrological basin in the prefecture of Crete. Ph.D. thesis Technical University of Crete (Chania 73100, Greece). Online: http://purl.tuc.gr/dl/dias/678F8DA8-E9B0-4684-8187-063A7A6CC8BC.
Varouchakis, E., & Hristopulos, D.T. (2017). Comparison of spatiotemporal variogram functions based on a sparse dataset of groundwater level variations. SpatialStatistics, August 24. Online: https://doi.org/10.1016/j.spasta.2017.07.003.
Varouchakis, E.A., Corzo, G.A., Karatzas, G.P., Kotsopoulou, A. (2018). Spatio-temporal analysis of annual rainfall in Crete, Greece. Acta Geophysica, 66, 319–328.
Varouchakis, E.A., & Hristopulos, D. (2013a). Comparison of stochastic and deterministic methods for mapping groundwater level spatial variability in sparsely monitoredbasins. Environmental Monitoring and Assessment, 185, 1–19.
Varouchakis, E.A., & Hristopulos, D. (2013b). Improvement of groundwater level prediction in sparsely gauged basins using physical laws and local geographic features asauxiliary variables. Advances in Water Resources, 52, 34–49.
Varouchakis, E.A., Hristopulos, D.T., Karatzas, G. (2012). Improving kriging of groundwater level data using nonlinear normalizing transformations – a field application. Hydrological Sciences Journal, 57, 1–16.
Verworn, A., & Haberlandt, U. (2011). Spatial interpolation of hourly rainfall – effect of additional information, variogram inference and storm properties. Hydrology and Earth System Sciences, 15, 569–584.
Vicente-Serrano, S.M., Saz-Sánchez, M.A., Cuadrat, J. (2003). Comparative analysis of interpolation methods in the middle ebro valley (Spain): application to annual precipitation and temperature. Climate Research, 24, 161–180.
Voudouris, K., Mavrommatis, T., Daskalaki, P., Soulios, G. (2006). Rainfall variations in Crete island (Greece) and their impacts on water resources. Publicaciones del InstitutoGeologico y Minero de Espana Serie: Hidrogeologia y aguas subterrá,neas.
Vrochidou, A.-E. (2013). Spatiotemporal drought analysis and climate change impact on hydrometeorological variables for the island of Crete. Ph.D. thesis Environmental Engineering of Technical University of Crete (Chania 73100, Greece). Online: http://purl.tuc.gr/dl/dias/EAA785D2-96CD-4C78-9CA5-4F4F905CFFED.
Vrochidou, A.-E., Grillakis, M., Tsanis, I. (2013). Drought assessment based on multi–model precipitation projections for the island of Crete. Journal of Earth Science Climatic Change, 4, 1000158.
žukovič, M., & Hristopulos, D. (2008). Spartan random processes in time series modeling. Physica A: Statistical Mechanics and Its Applications, 387, 3995–4001.
Watrous, L. (1982). Lasithi: a history of settlement on a highland plain in crete. Princeton, NJ: American School of Classical Studies in Athens, Hesperia Supplement XVIII.
Yaglom, A.M. (1987). Correlation theory of stationary and related random functions Vol. I. New York: Springer.
Yemefack, M., Rossiter, D., Njomgang, R. (2005). Multi–scale characterization of soil variability within an agricultural landscape mosaic system in southern Cameroon. Geoderma, 125, 117–143.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Supplementary material
Appendix: Supplementary material
Multilinear regression statistics
Table 4 presents statistics of multilinear regression for the trend analysis of average annual precipitation in Crete. The coordinates x, y, z that serve as predictors are measured in the Greek Geodetic Reference System (EGSA ’87), with x and y representing the longitude and latitude measured in meters (geographical parameters), and z being the elevation measured in meters above sea level (topographical parameter).
The coefficient of determination R2 measures how much of the variance of the response variable (precipitation) is explained by the model. For a model that involves all of the x, y, z, the coefficient of determination takes the value R2 ≈ 74%. The F-statistic measures the dependence between the response variable and the predictor variables in comparison to a model with constant intercept and no predictor variables. The p-value associated with the F-statistic is used for testing the null hypothesis, i.e., that the observed values of the precipitation can occur randomly without any dependence on the predictor variables. A small p-value indicates that the probability of the null hypothesis is respectively small and provides statistical evidence for the validity of dependence on the predictors.
The trend model that involves x, y and z has the highest coefficient of determination and the second highest p-value and F-value. The highest p-value is obtained for the model that involves the latitude (y) and the elevation (z) as predictor variables. This seems at first sight to contradict the observation of the West-East precipitation gradient in Crete which indicates a dependence on longitude. The paradox is resolved by noting that the western part of the island is at a higher latitude than the eastern part. So, the model with two predictor variables also accounts for the West-East gradient. Nonetheless, we choose to use the trend model with all three predictor variables due to its higher coefficient of determination.
Network sparsity
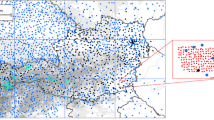
Figure 13 demonstrates the temporal sparsity for the period of the study (1948–2012). As evidenced in this plot, before 1970 most stations have large data gaps (marked by solid cells in the plot).

Matrix plot illustrating the gaps in the precipitation record. Rows correspond to different stations while columns correspond to years from 1948 until 2012. Station labels are alternately listed on the left and right vertical axes to avoid congestion. (C) stands for stations in Chania, (H) for Heraklion, (L) for Lassithi, and (R) for Rethymno. Only a subset of 27 (out of 54) stations are labeled for visual clarity. Empty grid cells mark locations with complete yearly records, while blue grid cells mark years that miss one or more monthly measurements at the location which corresponds to the particular cell row
Cross-validation measures
The following equations define the cross-validation measures used. In the following, \(x^{\ast }(\mathbf {s}_{i})\) represents the regression kriging estimate at point si based on N − 1 data excluding point si, while x(si) represents the true value of the field at point si, \(\overline {x(\mathbf {s}_{i})}\) denotes the spatial average of the data, and \(\overline {x^{\ast }(\mathbf {s}_{i})}\) the spatial average of the estimates. N is the number of stations.
Mean error (bias) (ME)
Mean absolute error (MAE)
Mean absolute relative error (MARE)
Root mean square error (RMSE)
Root mean square relative error (RMSRE)
Pearson’s Linear correlation coefficient (RP)
Test for correlated residuals in the linear regression model for \(\overline {P}_{t} \colon \)
The coefficients of the linear trend model for \(\overline {P}_{t}\) are determined using ordinary least squares (OLS). However, if the resulting residuals are correlated, the method of generalized least squares should be used in order to determine the model coefficients. However, the use of OLS is justified because the regression residuals are uncorrelated as shown in Fig. 14.

Autocorrelation (left) and partial autocorrelation (right) plots for the residuals of the global average annual precipitation in Crete (linear trend model shown in Fig. 12) versus the time lag (measured in years). The dashed lines represent the limits of the 95% confidence interval
Figure 14 presents the autocorrelation (ACF) and partial autocorrelation (PACF) functions for the linear regression residuals. The plots indicate that the residuals are not correlated, since both the ACF (at lags larger than zero) and PACF values are inside the 95% confidence bands for zero correlation.
Rights and permissions
About this article

Cite this article
Agou, V.D., Varouchakis, E.A. & Hristopulos, D.T. Geostatistical analysis of precipitation in the island of Crete (Greece) based on a sparse monitoring network. Environ Monit Assess 191, 353 (2019). https://doi.org/10.1007/s10661-019-7462-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10661-019-7462-8