
Abstract
A comprehensive comparative validation for two different types of dissolved oxygen (DO) analyzers, amperometric and optical, is presented on two representative commercial DO analyzers. A number of performance characteristics were evaluated including drift, intermediate precision, accuracy of temperature compensation, accuracy of reading (under different measurement conditions), linearity, flow dependence of the reading, repeatability (reading stability), and matrix effects of dissolved salts. The matrix effects on readings in real samples were evaluated by analyzing the dependence of the reading on salt concentration (at saturation concentration of DO). The analyzers were also assessed in DO measurements of a number of natural waters. The uncertainty contributions of the main influencing parameters were estimated under different experimental conditions. It was found that the uncertainties of results for both analyzers are quite similar but the contributions of the uncertainty sources are different. Our results imply that the optical analyzer might not be as robust as is commonly assumed; however, it has better reading stability, lower stirring speed dependence, and typically requires less maintenance. On the other hand, the amperometric analyzer has a faster response and wider linear range. Both analyzers seem to have issues with the accuracy of temperature compensation. The approach described in this work will be useful to practitioners carrying out DO measurements for ensuring reliability of their measurements.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Dissolved oxygen (DO) concentration is a key parameter for characterizations of aqueous environments. It is increasingly evident that the DO concentration in the world’s oceans is not constant, but is decreasing in many parts of the ocean (Schmidtko et al. 2017; Diaz and Rosenberg 2008). This strongly influences marine life (Jessen et al. 2017); ocean circulation is related to the uptake of CO2 (incl anthropogenic) by the ocean, and is ultimately related to our planet’s climate (Stramma et al. 2011). Accurate measurements of DO concentration are very important for studying these processes, understan-ding their roles, and predicting climate changes. These processes are spread over the entire area of the world’s oceans and natural waters, and at the same time, are slow and need to be monitored over long periods of time. This invokes serious requirements for the measurement methods used to monitor DO.
Most DO measurements are conducted using sensors. Contrary to common perception, accurate and reliable measurement of DO concentrations using sensors is not entirely straightforward (Helm et al. 2010). This is evident from intercomparison studies between different laboratories (Näykki et al. 2013) and has led to the exclusion of sensor-based data (in favor of data obtained by the classical Winkler titration method) on the basis of low reliability from some of the recent compilations of ocean DO data (Garcia et al. 2010). It is, however, clear that because of the vast area of the world’s waters and the need for obtaining continuous DO data (including that from distant regions of the oceans), logistically, automated operating sensor systems are needed for such measurements. Thus, every effort should be taken to improve the reliability of DO measurement using sensors.
Two types of sensors are commonly used for measurement of DO concentration in water: the classical amperometric sensors and the more recently available sensors based on luminescence quenching (Tengberg et al. 2006). Having completely different principles of operation, both of these sensors have their advantages and shortcomings. In this report, we present an experimental comparison of two representative sensors that use these two types of technologies along with a metrological evaluation of their reliability. The comparison is carried out on the basis of the following criteria: drift, intermediate precision, accuracy of temperature compensation, accuracy at zero concentration, linearity, influence of liquid flow rate on reading, repeatability (reading stability), and matrix effect of dissolved salts. The sensors were evaluated in laboratory-prepared samples and in natural water samples. Based on a comparison of result, we present a practitioner-oriented strategy for assuring the quality of measurements when using these sensors, give an overview of the relevant uncertainty sources, and present a general approach of uncertainty estimation when measuring DO with sensors.
It is often overlooked that because of the different working principles, the dominating uncertainty sources and the factors that limit accuracy are different for optical and amperometric DO sensors. Both working principles of DO analyzers are represented by one example device in this work. Therefore, the obtained results cannot be automatically attributed to all other devices of the same working principle. Nevertheless, much of the results are generalizable and the presented comparison could be of interest to the wide community of researchers in fields of analytical and environmental chemistry, ecology, and oceanography.
Theory and principles of sensor operation and dissolved oxygen measurement
An analyzer for the measurement of DO concentration consists of the DO sensor and the meter (the electronic control unit or computer), and in the case of luminescent-based systems, a component with a light excitation source and a luminescence detector. Working principles of the different types of DO sensors are different. In this work, two different types of sensors, amperometric and optical, are evaluated.
Amperometric sensors
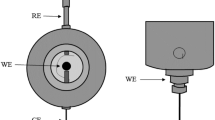
The amperometric DO sensor (see ref. (Jalukse and Leito 2007) for a scheme) consists of an inert (Pt, Au, Ag) cathode (often called as a working electrode (Stetter and Li 2008)) and an anode (often made of Pb, Cd, etc.) immersed in an electrolyte solution, forming an electrochemical cell. The operation is based on measuring the current between the electrodes. The electrochemical cell is separated from the measured solution using polymeric membrane. Oxygen from the sample diffuses through the membrane and the electrolyte layer onto the surface of the cathode and reduces according to the following reaction:
The anode process typically entails formation of the hydroxide from the electrode metal. The current between the anode and cathode is measured as the signal and is dependent on oxygen concentration in the sample (Hitchman 1978). The overall rate of this process is determined by the diffusion of oxygen through the polymeric membrane because oxygen reducing at cathode is significantly faster than diffusion through the membrane. In this case, the analyte concentration on the surface of the cathode is close to zero and every oxygen molecule that reaches the cathode surface is immediately reduced (Stetter and Li 2008).
When the reaction rate is limited by mass transfer rather than electron transfer, then the current between the two electrodes is determined by oxygen diffusion flux on the cathode. This is shown by
where I is the output signal of the sensor, n is the number of electrons participating in the reaction (n = 4), F is the Faraday number, A is the area of the cathode surface, and J is oxygen diffusion flux to the cathode. Diffusion flux is dependent on oxygen partial pressure, electrolyte layer, and membrane thickness and permeability that is in turn is dependent on temperature. More detailed information, as well as the mathematical models, can be found in the literature (Jalukse and Leito 2007).
For the stability of the sensor, it is important that the membrane properties should not change in time. Polyethylene, polypropylene, and polytetrafluoroethylene (PTFE) are mostly used as membrane materials (Mancy and Jaffe 1966). Currently, very thin PTFE films and silicone membrane are commercially available (Stetter and Li 2008). The higher the permeability of the membrane, the higher the sensitivity of the sensor (Hitchman 1978). However, other gases, ionic substances, and water should not be able to pass through the membrane in order to ensure selectivity and stability of the sensor and to avoid contamination of the anode and cathode. Unfortunately, these commonly used membrane materials are permeable also to carbon dioxide and dihydrogen sulfide. When present in the sample, they can react with the electrolyte or contaminate the electrodes (Mancy and Jaffe 1966). Permeability of the membrane changes significantly with temperature during measurements. Therefore, it is necessary to compensate for the signal dependence on temperature when measuring at different temperatures. Today, amperometric sensors typically have built-in temperature sensors and automatic temperature compensation functionality (ISO 5814: 2012).
When working with amperometric sensors, it is important to stir the solution being measured. When the solution does not move, then DO concentration on the membrane surface decreases because oxygen is used up for the electrochemical reaction (Eq. 1). This results in obtaining lower observed DO values. Stirring speed does not have to be high for obtaining more accurate results, but it is important to use the same speed during calibration and measurement (Jalukse and Leito 2007). Further, not all the oxygen that permeates the membrane reaches the cathode. Some of it dissolves in the sensor body. This oxygen may later reach the cathode, be reduced, and cause non-zero blank readings (Hitchman 1978).
There are two types of amperometric sensors: polarographic and galvanic. In the case of polarographic sensing systems, a potassium chloride solution is generally used as the electrolyte and the voltage between the two electrodes is induced by an external power supply (usually a battery) (Hitchman 1978). The cathode and anode (usually made of silver) are polarized, and depending on the amount of oxygen reaching the cathode, its reduction and oxidation of the anode will start. Polarographic sensors have several drawbacks. When switching the device on, a relatively long stabilization time, 10 min to 1 h, is needed (Langie and Lewandow 1999). Silver chloride precipitates on the anode forming a deposit on the electrode surface. Therefore, regular anode cleaning is required. Sulfide ions are the biggest interference for this type of sensor because they react with silver and an insoluble silver sulfide layer can be formed on the anode surface. The electrolyte solution must often be replaced because hydroxide ions are formed on the cathode (see Eq. 1). This causes increases in the zero current that is caused by the increase of pH of the neutral potassium chloride electrolyte (Langie and Lewandow 1999).
In the case of galvanic sensors, an active metal (e.g., lead, zinc, or cadmium) is used as anode material. Potassium hydroxide solution is commonly used as the electrolyte (Hitchman 1978; Jalukse and Leito 2007; Mancy and Jaffe 1966). The anode metals have negative standard potentials. Upon connecting the anode with the inert cathode, electrons will move from the anode to the cathode and the electrochemical processes may continuously run. However, the current will flow through the cell only if oxygen is present at the cathode (Hitchman 1978). Galvanic sensors have several advantages compared to polarographic sensors. First, the electrolyte pH does not change significantly due to electrochemical reactions—on the one hand, the OH− ion concentration in the electrolyte is high and on the other, the OH− ions formed in the cathode process are consumed in the anode process of metal hydroxide formation. Also, sensor stabilization time is relatively short. And if a silver cathode is used, then its negative polarization prevents reaction with sulfide ions. Further, the hydroxide formed in the anode process freely flakes off the anode, leaving exposed metal for reaction, and therefore, the galvanic system does not require frequent anode cleaning and polishing (Langie and Lewandow 1999).
Optical sensors
Optical DO measurement systems are based on the quenching of luminescent sensor materials, or dyes, by oxygen (Ramamoorthy et al. 2003). This diffusion-controlled bimolecular interaction results in the decrease of the material’s luminescence lifetime or steady-state luminescence intensity (quantum yield). Luminescence refers to the radiative relaxation process (i.e., emission of light) of molecules in excited singlet electronic states. This radiative process competes with non-radiative processes that result in non-emissive deactivation of the excited state molecules. Luminescence quenchers present in solution increase the probability of the non-radiative process, thereby decreasing the luminescence intensity and/or lifetime (Gewehr and Delpy 1993). Lakowicz (2006) gives comprehensive information on the processes and theory of luminescence. Also, an excellent and overview of optical methods for sensing oxygen can be found in a more recent review (Wang and Wolfbeis 2014).
Molecular oxygen, a ground state triplet molecule, is one of the most common luminescence quenchers. Interaction of the excited state of the luminescent dye with molecular oxygen leads to a non-radiative energy transfer generalised by(Ramamoorthy et al. 2003):
where L* is luminophore molecule in excited state, O2 is oxygen in triplet ground state, L is luminophore molecule in ground state, and O2* is excited singlet state oxygen molecule (Ramamoorthy et al. 2003). The degree of quenching is related to the frequency of collisions and is therefore dependent primarily on the oxygen concentration, but also on pressure and temperature (Ramamoorthy et al. 2003).
Quenching of luminescence by oxygen is a dynamic/collisional process that can be accompanied by static quenching processes (Pagano et al. 2014). In the case of dynamic quenching by oxygen, luminescence lifetimes decrease independent of static quenching, making lifetime measurements a valuable tool in sensing DO in a luminophore’s environment. Luminescence lifetime refers to the average time that a luminophore spends in an excited state prior to emitting. This time is especially long if the molecule emits resulting from a transition from a triplet electronic state. Such radiative decay is called phosphorescence. The probability of the non-radiative de-excitation of a molecule due to collisions with oxygen is greater the longer it resides in an excited state. Therefore, the magnitude of this dynamic quenching is directly proportional to the sensing material’s luminescence lifetime, and sensors with longer lifetimes are more sensitive to oxygen in their environment. For this reason, phosphorescent materials are often used in oxygen sensing systems.
The oxygen quenching process can be described using either luminescence intensities or lifetimes according to the Stern-Volmer equation:
where τ0 and τ are the luminescence lifetimes in the absence and presence of oxygen, respectively. I0 and I are steady-state intensities of luminescence in the absence and presence of oxygen, respectively; kq is the diffusion-controlled bimolecular rate constant of quenching by oxygen; KSV is the Stern-Volmer constant; and [O2] is the concentration of oxygen (Lakowicz 2006; Gillanders et al. 2005). KSV (or τ0 kq) is the slope of a Stern-Volmer plot and it characterizes the sensor’s oxygen-sensitivity (Narayanaswamy and Wolfbeis 2004).
Optical sensors can have particularly high sensitivity at low oxygen concentrations because with the lower the oxygen concentrations, the luminescence is higher due to less quenching (Shaw et al. 2002). At higher oxygen concentrations, luminescence intensity-based sensors can deviate from the Stern-Volmer relationship. This is caused by the matrix micro-heterogeneity—some dye molecules can be inaccessible by oxygen molecules due to their location in the matrix or dye molecules form aggregates that are less sensitive to oxygen (Gillanders et al. 2005).
Optical sensors consist of an oxygen sensitive film and a light source/detector system. The film typically contains a luminescent dye encapsulated in a polymer medium. The optical system includes an excitation light source, commonly a light-emitting diode (LED) or laser for exciting the dye at a particular wavelength, reference light source, photon detector such as a photodiode or photomultiplier tube, and an optical fiber for the transmission of the light (Xiao et al. 2003; YSI n.d.; Ramamoorthy et al. 2003). The LDO101™ model sensor used in this work contains a blue LED as the excitation light source (Häck 2006). Upon radiative relaxation, the dye emits a red light pulse for which its intensity and lifetime depend on the DO concentration at the film surface. The reference LED, which emits red light, is used for obtaining a reference value for ensuring accuracy of the sensor (this enables carrying the measurement out as comparison of the two pulses) (Häck 2006).
Luminescence-based sensors can operate by measuring either decreases in luminescence intensity or luminescence lifetime. The intensity-based sensors have several drawbacks (McDonagh et al. 2001, 2008): signal fluctuations caused by changes in excitation source intensity, photobleaching of the luminescent indicator complex, or changes in the concentration of the indicator within the sensing environment due to leaching or degradation. Measurements of steady-state luminescence can also be impacted by static quenching due to complex formation. The luminescence lifetime is determined by the molecular structure of the dye and oxygen concentration in the film and is unaffected by the factors mentioned above (McDonagh et al. 2001, 2008). For these reasons, most modern DO sensors measure based on luminescence lifetime instead of intensity.
Laboratory-based systems that employ direct lifetime measurement techniques tend to include a pulsed laser source and a suitable photodetector, for example, an intensified CCD camera (McDonagh et al. 2008). Such systems are quite expensive and complex and are not routinely used in DO sensors. DO sensors that measure via luminescence lifetimes are typically based on phase shift measurements (McDonagh et al. 2008). In measurements by phase shift, the excitation source is modulated with a predefined frequency. As a result, the luminescence will also be modulated but its phase will be shifted with respect to the source modulation. The resulting phase shift (tanϕ) is measured and the luminescence lifetime can be found as follows:
where f is the modulation frequency (McDonagh et al. 2001). Such measurement techniques can be applied using low-cost phase shift detection electronics with LED sources and photodiode detectors (McDonagh et al. 2008).
In optical sensors, the luminophores used are often platinum-group metal (platinum, palladium, ruthenium) complexes of porphyrin (metalloporphyrins) and polypyridyl. Ruthenium polypyridyl complexes have high luminescence efficiency, spectral maxima in the visible range, large Stokes’ shift (spectral shift between excitation and emission spectra), and a long luminescence lifetime (~ 1 μs) (McDonagh et al. 2008; Ramamoorthy et al. 2003). Among the most widely used metalloporphyrin complexes are the platinum and palladium octaethylporphyrin. They have longer lifetimes (100 μs–1 ms) due to the phosphorescence transition from the excited state in these complexes compared to respective Ru(II) complexes, and therefore, offer higher sensitivity. They are also characterized by larger Stokes’ shifts that make measurements generally easier (McDonagh et al. 2008). In DO sensors, luminophores are encapsulated into some polymer or sol-gel matrix (McDonagh et al. 2008). Matrices must have very high permeability of oxygen (for rapid response); permit an easy and reproducible immobilization of the indicator dye; and possess good optical properties as well as high thermal, mechanical, and chemical stabilities (Narayanaswamy and Wolfbeis 2004). They should not be permeable to water and such dissolved substances that can interfere: metal ions, oxidizing and reducing substances (Gillanders et al. 2005). The most widely used materials among polymeric materials include polystyrene, polyvinyl chloride, polymethylmethacrylate, polydimethyl siloxanes, polytetrafluoroethylenes, and cellulose derivatives such as ethyl cellulose (McDonagh et al. 2008).
Experimental
Two different types of DO analyzers were compared in this work: an amperometric-based WTW-340i with sensor CellOx-325 (Au cathode, Pb anode) and an optical-based HACH-HQ30d with sensor LDO101 (working on the basis of luminescence lifetime quenching). Their main characteristics, as given by the manufacturers, are presented in Table S1 in the Electronic supplementary material (ESM).
Calibrations of analyzers were performed in deionized (Milli-Q) water saturated with air using the setup described in ref. Näykki et al. (2013). The inner and outer thermostat baths were filled with Milli-Q water while keeping the water level in the outer bath ca 3.5 cm and in the inner bath (measurement cell) ca 6 cm lower than the edge of the bath. Saturation conditions were created in the measurement cell (3.9 dm3). Water in this cell was aerated with air that was previously double-saturated with water vapor. The mixing rate of the stirrer (Janke & Kunkel RW 20) was set to 120 rpm and temperature in the thermostat was set to 20 °C. For measuring the water temperature, a digital thermometer (Chub-E4) was used. Sensors were immersed into the measurement cell and the sensor readings were allowed to stabilize (usually taking about 2 h). The readings were considered stable if no systematic change was detected during 10–15 min. Thereafter, the analyzers were calibrated.
The DO concentration in air-saturated MilliQ water is usually found using one of the various available empirical equations (Hellat et al. 1986; Benson and Krause 1980; Mortimer 1981) and it can be used as a reference value for comparison with the result given by the analyzer. The equation from Mortimer (1981) is considered one of the best available; it has been adopted by the standard ISO 5814: 2012 and was also used in this work. The DO concentration reference values and their uncertainties were calculated as described by Helm et al. (2012).
In this work, the water vapor pressure in the air used for saturation is considered to correspond to water vapor pressure at 100% relative humidity because double saturation was used. Air pressures were measured throughout the work with Vaisala BAROCAP digital barometer PTB330 and were used for accurate calculation of the reference values.
A number of tests were conducted: drift and repeatability, temperature compensation, flow dependence, linearity, and reading stability, including concentration and temperature stabilization. Matrix effect influences on the oxygen readings in real samples were evaluated by analyzing the dependence of the readings on concentrations of different salts (at saturation conditions). All of these tests are described separately below.
Results and discussion
Drift
For evaluating analyzers’ drift, DO saturation concentrations in (Milli-Q) water at 20 °C (at calibration conditions) were measured on 13 to 17 days during 1 month. The deviations of the observed results from the reference values (see above) were calculated and they are presented in Fig. 1.

Sensor drifts over a month
Figure 1 reveals that during different time periods, the drift of the same analyzer can differ both by magnitude and by sign. This means that it is not possible to establish a reliable function for correcting the results for drift and that the most reliable approach against drift impacts is periodic recalibration of the analyzer. The measurement uncertainty due to drift is estimated by multiplying the absolute value of the largest observed slope plus its standard deviation (Fig. 1) with the number of days passed from calibration (see Table 2).
Intermediate precision
The intermediate precision of measurement refers to the agreement between measured results obtained on the same objects on different days. As such, intermediate precision fully or partially accounts for short-term drift and differences in conditions between calibration and measurement. In the case of measurement uncertainty estimation by the modeling approach (see the respective section below), intermediate precision is not used because the same effects are taken into account by other uncertainty components. However, intermediate precision is important in its own right for characterization of the procedure, as well as uncertainty estimation using the Nordtest approach.
Intermediate precision was evaluated from the same data that were used for evaluating drift (Fig. 1). Standard deviations of the differences between measured and reference values were used as the estimate of intermediate precision. Between day reproducibility was estimated as 0.069 mg/L (pooled standard deviation from two different series, 17 and 16 individual results, respectively, described in the “Drift” section) and 0.051 mg/L (pooled standard deviation from two different series, 17 and 13 individual results, respectively, described in the “Drift” section) for optical and amperometric sensor, respectively. This is an acceptable approach if we consider that the measurement procedure involves calibration once a month.
Accuracy of temperature compensation
Temperature compensation control tests were conducted at temperatures 5, 10, 15, 20, 25, and 30 °C under saturation conditions. Measurements were carried out in the order of decreasing temperatures: the first measurement temperature was 30 °C and the last was 5 °C. This order was used to avoid supersaturation, which can easily occur if one moves from lower temperature (where solubility is higher) to higher temperatures. We made sure that the desired temperature was reached and the analyzers’ readings were stabilized prior to every measurement. Typically, at least 2 h was needed for complete stabilization. Figure 2 presents the differences between measured and reference concentrations. The plots are presented relative to the saturation value at 20 °C, i.e., the measured saturation value at 20 °C was subtracted from all measured values and the reference saturation value at 20 °C was subtracted from all reference values.

Differences in sensor readings from saturation concentration reference values at different temperatures
The analyzers were calibrated at 20 °C. Because of this, the difference between the measured and reference value at 20 °C is minimal and the unsigned difference is larger as the more distant the measurement temperature is from the calibration temperature. The results demonstrate that the temperature compensation of both analyzers is somewhat biased. This is more pronounced with the amperometric and less so with optical analyzer. Essentially, at 5 °C, the amperometric analyzer is biased by 1% while the optical analyzer is biased by 0.5%. This bias is not large; however, it increases the measurement uncertainty as the measurement temperature is shifted away from the temperature at calibration. This effect was taken into account in uncertainty estimation by the slopes of the respective plots (see Table 2). In order to obtain results with higher accuracy, it is advisable to calibrate the sensor at a temperature that is as near as possible to that of when the measurement is made.
Accuracy at zero concentration
For zero oxygen concentration control tests, a pure (purity 99.999%) N2/Ar gas mixture or sodium sulfite and cobalt(II) chloride solution was used. In the latter case, oxygen is removed from solution according to the following reaction.
The sensors were placed into sodium sulfite solution or oxygen-free gas environment and meter readings were recorded during a 10-min time period (see Fig. 3). According to the data, response times, tR_95% and tR_99%, were calculated. Results are summarized in Table 1. These results demonstrate that both sodium sulfite solution and oxygen-free gas are suitable for zero concentration control tests (and both are allowed in ISO standards ISO 5814:2012 and ISO 17289:2014). In the case of the amperometric sensor, the analyzer response times are significantly shorter than those of the optical sensor. Possibly the main reason is that the amperometric sensor consumes oxygen (at a rate of 0.008 μg/h according to manufacturer), while in the case of optical sensor, oxygen has to diffuse out of the optical sensor (which takes time).

Time-dependence of the response of the WTW-340i and HACH-HQ30d analyzers. Measurement started at a DO concentration of 9 mg/L
Figure 3 demonstrates that the optical analyzer requires about 10 min for establishing the reading, whereas the amperometric analyzer needs about 3 min. Interactions with practitioners have revealed that 3 min is often the typical stabilization time used in routine measurements. This invokes systematic effects of 0.5 and 0.04% of the reading of the optical and amperometric analyzers, respectively. These are worst-case estimates and have been taken into account in the case of measurement uncertainty estimation. Careful examination of Fig. 3 reveals that the reading of WTW-340i never reached zero. As an amperometric-based sensor, this indicates either aging of the internal solution or contamination of one of the electrodes. In this case, the membrane was replaced 5 months prior to the experiments.
The standard uncertainty caused by the possible inaccuracy of the zero value in the case of amperometric sensor is estimated by involving the zero point together with its uncertainty into finding the slope and intercept of the calibration line, whereby its uncertainty will be included in the uncertainties of slope and intercept.
Linearity
It has been demonstrated that the response of amperometric sensors is intrinsically linear over a wide range (Stetter and Li 2008; Hitchman 1978). Based on this knowledge, we assume that the amperometric sensor is linear in the range of 0 to 20 mg/L. This gives us the opportunity to assess the linearity of the optical analyzer. The intrinsic responses of optical sensors that are based on luminescence measurements are not always linearly related to DO concentration. The relationship between the DO readout of the optical analyzer and the actually measured luminescence lifetime, τ, is expressed by the second-order polynomial modified Stern-Volmer equation:
where K1 and K2 are the first and the second coefficients, respectively. These coefficients are experimentally determined during calibration (Liu et al. 2004). They are typically determined by the manufacturer and stored in the analyzer’s system, and in practice, are generally not altered during usage.
The properties of the sensor change over time so that the [O2] found from Eq. 7 will be biased from the real [O2]. For correcting this bias, a linear calibration function of the following form is applied:
where the slope, b1, and intercept (termed “offset” in the instrument), b0, are determined during calibration carried out by the user and [O2]corrected is ultimately given. This correction will not change linearity but will adjust the reading to match the actual DO concentration as closely as possible.
The linearity test was carried out by varying oxygen concentration in the range 0 to 20 mg/L by mixing together different gases or gas mixtures: pure oxygen (99.9% of purity), mixture of oxygen and nitrogen containing (10.55 ± 0.01) % oxygen, air (with oxygen content 22.94%), and mixture of N2 and Ar with 99.999% purity (compositions are v/v). All measurements were conducted at the same temperature over a short time. The results of this test are presented in Fig. 4.

Difference of optical analyzer HACH-HQ30d results against amperometric analyzer WTW-340i results
It can be seen that the optical analyzer has good linearity at DO concentrations up to 11 mg/L. At concentrations higher than ca 11 mg/L, the optical analyzer’s response becomes nonlinear. When measuring two times higher a concentration than the saturation condition, then the systematic shift can be up to 0.3 mg/L. The systematic difference (when measuring higher concentrations than 11 mg/L) has been taken into account by measurement uncertainty estimation.
Influence of liquid flow rate on reading
The influence of liquid flow rate on DO readings was tested at saturation conditions at 20 °C using a mechanical stirrer with adjustable rotation rate. The rotation rates used were 60, 120, 160, 210, 260, and 310 rpm. Calibration was always done at a stirring rate of 120 rpm. Figure 5 presents the relative differences between readings obtained at different stirring speeds and the reading obtained at a stirring speed of 120 rpm. Every point in the graph is the average result of three or four measurements made on different days. For every measurement, five replicate readings were recorded in 15 s.

Dependence of amperometric and optical sensor DO readings on flow rate
The response of the amperometric analyzer depends strongly on the stirring rate. Figure 5 demonstrates that increasing the stirring rate by 2.5 times (250% of respective stirring speed at calibration) increases the reading by roughly 2%. Although the relationship is not exactly linear, its linearity is sufficient to use a linear function for accounting for the stirring effect in measurement uncertainty estimation. The response of the optical sensor is essentially insensitive to stirring rate. These systematic deviations are taken into account by estimating the measurement uncertainty.
Repeatability of sensor reading
Solution flow rate also influences reading repeatability. In the case of the amperometric analyzer, the repeatability standard deviation decreases with increasing flow rate: the pooled repeatability standard deviation at 120 rpm is 0.02 mg/L and at 310 rpm is 0.007 mg/L. The readings of the optical sensor are much more stable than those of the amperometric sensor. The pooled repeatability standard deviations of the optical analyzer readings at the same flow rates are 0.004 and 0.005 mg/L, respectively. Repeatability was estimated by recording the reading at 3-s time intervals for a total of five readings. The measurements were conducted on three different days and the obtained within-day standard deviations were pooled. The uncertainty component of reading stability, both during calibration and measurement, is based on the respective standard deviations. With both sensors, the highest obtained standard deviation value was used as the estimate of repeatability uncertainty.
Matrix effect of dissolved salts
KCl solutions with concentrations 0.001, 0.01, 0.1, and 1 mol/L were saturated with humid (100% relative humidity) air. Conductivities of the solutions and oxygen contents were measured in a thermostatted cell at 25 °C. The built-in salinity correction of the instruments was not used. The results are presented in Fig. 6, including the DO content obtained by the Winkler method (Winkler) performed the same way as in Helm et al. (2012) and calculated saturation concentrations (Cref).

DO measurements in KCl solutions
Saturation concentrations in KCl solutions were calculated according to
where [O2]0 is DO saturation concentration in pure water [mg/L] (calculated as described in the “Experimental” section), [O2] is DO saturation concentration in KCl solution [mg/L], γ(O2) is the activity coefficient of oxygen, m is molar concentration of KCl in solution [M], A = 0.3076 and B = − 0.01177 (25 °C) (Millero et al. 2003).
Both analyzers display very similar readings and are in agreement with the DO saturation values in pure water. The 0.1 mg/L bias of the HACH instrument is due to the time (ca 1 week) that passed from the last calibration and serves as a good example of sensor drift over time. The readings of the analyzers are much higher than the saturation concentrations in the solutions with higher KCl content. The higher the KCl concentration in the solution, the larger the difference. This is caused by the working principle of DO sensors: they actually measure the activity, not the concentration, of DO (McKeown et al. 1967). Oxygen activity, a, is dependent on activity coefficient, γ, and oxygen concentration, c, in the solution according to
So, both analyzers use the same activity coefficients during calibration and measurement. When salt content (conductivity of the solution) increases, then oxygen activity coefficient in water increases, and as a result, its solubility decreases. According to Eq. 9, it is possible to demonstrate that the activity coefficient is directly related to salinity, which in turn can be expressed (as an approximation) by conductivity. Besides salinity, conductivity also depends on temperature. Measurement and calibration readings are often not conducted at the same temperature, so this difference has to be taken into account.
When combining equations from Benson-Krause (Benson and Krause 1984) and Eq. 9, it is possible to calculate activity coefficients at different temperatures and salinities. To use this approach, we need to convert measured conductivities into salinities. Conductivity meters usually measure the conductivity of the sample and recalculate it to a value under the condition of 25 °C. The conductivity value at 25 °C can be converted to salinity using equations from Clesceri et al. (1998). For more detailed information, readers are encouraged to see the ESM.
To take the activity coefficient into account, we have to divide the measured value by the found activity coefficient. Its accuracy depends on different issues (uncertainties of different constants, functions, conductivity measurement), so we have estimated the uncertainty of activity coefficient as ± 50% of its difference from 1.
Measurement uncertainty
Measurement uncertainty was estimated using the ISO GUM modeling approach (JCGM 100: 2008) and by the single-lab validation approach, as formalized by Nordtest (Magnusson et al. 2012).
Measurement uncertainty estimation by modeling approach
The optical analyzer that was used can be calibrated using two points: zero value and saturation value (HACH Company 2006). The amperometric analyzer that was used is calibrated using the saturation value only. The zero value (0 mg/L DO) of the amperometric instrument can only be checked, but not adjusted. Based on the zero value, it is determined if the sensor is in order or whether the electrolyte must be changed and the cathode cleaned (Weilheim 2002, WTW GmbH & Co. KG). Both sensors were found to have linear responses up to 11 mg/L. Therefore, a linear calibration equation was used as the basis of the measurement model presented in Eqs. 11 and 12 below. Some of the quantities impacting the measurement results are explicitly included in the initial (simplified) model (Eq. 11). There are, however, a number of effects impacting the measurement results that are not accounted for by Eq. 11. In order to take their influence into account, the model was modified with a number of additional terms and the modified model is presented in Eq. 12.
Cread_meas is the analyzer reading at measurement and its uncertainty components are the reproducibility of the reading and rounding of the reading. γ is the oxygen activity coefficient and its uncertainty is estimated as described above. ΔCstir takes into account the uncertainty caused by the difference of flow rates between the measurement and calibration. ΔCΔt describes uncertainty caused by the temperature compensation. ΔCdrift characterizes the uncertainty due to the possible drift of the sensor in case calibration is not done right before the measurement. ΔClinearity takes into account the uncertainty of the optical sensor’s non-linearity. In the case of the amperometric sensor, its contribution to overall measurement uncertainty estimation equals 0. All of the additional terms (denoted with deltas) have a value of zero (i.e., they do not influence the measurement value), but non-zero uncertainty (i.e., they do influence the measurement uncertainty).
The slope and intercept of the calibration are calculated according to a two-point calibration:
where Cread_cal and Cread_cal_0 are the sensor readings at saturation conditions (in calibration environment) and in oxygen-free environment, respectively, right after the calibration. Their uncertainty sources are repeatability and rounding of the reading. Ccal is the reference DO concentration that corresponds to saturation conditions. Its value is calculated the same as by Helm et al. (2012) and its uncertainty is also estimated the same as by Helm et al. (2012). Ccal_0 is DO content in an oxygen-free environment. Its value is assumed to be 0.00 mg/L and its uncertainty is estimated as ± 0.01 mg/L.
Influences of all uncertainty sources on the measurement results were evaluated. Uncertainty estimates of the influencing parameters were summarized as the square root of the sum of squares. Influences of the different uncertainty components on the result generally obeyed linear relationships that gave an opportunity to use linear functions for finding the systematic deviations. All of these systematic deviations were converted to standard uncertainty estimates by dividing by the square root of three (JCGM 100: 2008). Table 2 presents details about the uncertainty component calculations.
The Kragten approach (Kragten 1994) was used for measurement uncertainty calculations. The measured analyzer’s reading Cread_meas is corrected according to Eq. 12 to obtain Cresult. The uncertainty estimates of the parameters in different measurement situations are presented in the ESM. Uncertainty of (in)stability is evaluated jointly via u(Cmeas_Rep), u(Ccal_rep), and u(ΔCdrift). Measurement uncertainties of real sample measurements and En values (ISO/IEC 17043:2010) (see Eq. 15) were calculated to estimate how realistic the measurement uncertainty estimates between two analyzers are:
where CWTW and CHACH are the readings and UWTW and UHACH are the expanded uncertainties (k = 2) of the amperometric WTW-340-i and optical HACH-HQ30d systems in the sample, respectively. The En values are interpreted as follows: | En | ≤ 1 means agreement, | En | > 1 means disagreement.
Measurement uncertainty estimation by single-lab validation (Nordtest) approach
Measurement uncertainty was evaluated also by using the so-called single-lab validation approach published by Nordtest (Magnusson et al. 2012). Contrary to the modeling approach, the measurement uncertainty obtained here characterizes analysis procedures rather than a concrete result. This approach does not go deeply in the method procedure, but uses mostly the data from past measurements (any kind of validation and quality control data) for uncertainty estimation. That is why the estimated measurement uncertainty in this does not directly follow from the data of any specific result, but can be assigned to any individual result. We are working mostly at medium or high DO concentration levels, where measurement uncertainty is roughly proportional to the analyte level. Therefore, we are using relative quantities for calculating the measurement uncertainty.
In the case of the Nordtest approach (Magnusson et al. 2012), the effects causing uncertainty are divided into two groups: systematic effects and random effects, estimated as uncertainty components u(bias) and u(Rw), respectively (see the ESM). It is important to mention that these effects must be determined during a sufficiently long time period. Systematic effects are estimated by the root mean square of bias values, i.e., differences between the measured result and reference value. The reference value also has uncertainty, denoted as u(Cref), and it has to be taken into account. For estimating the possible bias, we have used the data of drift estimation, temperature compensation tests, and measurements in water with higher salinity. These measurements were carried out with samples where we can find the reference value together with its uncertainty. The procedure for preparing the DO-saturated samples is exactly the same as in Helm et al. (2012). Therefore, the standard uncertainty of the reference value is estimated the same, 0.031 mg/L or 0.4% (relative), as in Helm et al. (2012).
Drift was measured two times as month-long series, involving altogether 33 and 30 individual results for the optical and amperometric sensors, respectively. Temperature compensation tests include measurements in 1 day for altogether five individual bias determinations. Measurements in KCl solution were made in 1 day and include four individual results. The period of these measurements was 7 months long and the relative root mean squares of all these bias values were 1.31 and 0.97% for the optical and amperometric sensors, respectively. So, the uncertainty caused by the systematic effects, taking into account both bias and uncertainty of the reference value (see the equations in the ESM, Tables S12 and S13), can be estimated as 1.37 and 1.05% for the optical and amperometric sensors, respectively.
Measurement uncertainty caused by the random effects is estimated by the intermediate precision evaluated from the drift and stirring effect measurement data. Drift measurements were done with two different sensor calibration values, whereby one calibration was used during 1 month. Stirring effect measurements were carried out on three (amperometric) or four (optical) different days. Intermediate precision has been estimated by pooling the standard deviation of the relative differences of results from the reference value during two separate months, as well as within-day standard deviations of results obtained with different stirring speeds. As a result, the intermediate precision was estimated as 0.26 and 1.00% for the optical and amperometric analyzers, respectively.
Combining measurement uncertainties caused by the systematic and random effects gives us 1.4 and 1.5% combined standard uncertainties resulting in standard uncertainty estimates of 0.14 and 0.15 mg/L in the case of samples with a DO concentration of 10 mg/L for optical and amperometric sensors, respectively.
Measurements in real samples (different bodies of water)
Five different samples were measured in four different bodies of water during 1 month (data shown in Table 3). In the case of both DO sensors, the main uncertainty contributors depend on the measurement conditions. For example, in the case of measuring water with high conductivity (Pärnu coast), the uncertainties of both sensors were additionally influenced by the oxygen activity coefficient (γ) contributing 12% of the overall uncertainty. In all other cases, its contribution was negligible. When measuring a sample at much lower temperatures than the conditions during calibration (River Emajõgi and Jordan spring), a large part of the uncertainty is caused by the non-ideal temperature compensation (ΔCΔt). This effect is much larger in the case of the amperometric sensor, as we already concluded from Fig. 2 above. The same applies for the stirring effect (ΔCstir): it is always larger in the case of the amperometric sensor. In fact, in the case of optical sensor, it is always negligible.
In all cases when sensors were calibrated a few days before measurement, the dominating uncertainty contributor was the reproducibility of the instrument reading (Cread_meas). It dominates in both sensors but its contribution is always approximately two times higher in the case of optical sensor. The reason can be in the longer stabilization time of the optical compared to the amperometric sensor. Both sensors were always handled the same way and the same stabilization time was allowed. In one scenario, the largest uncertainty was contributed by instrument drift (Lake Ilmatsalu 1). In this case, 24 days had passed from the last calibration. Even though the uncertainty was estimated higher than usual, the En number shows strong discrepancy between the sensor results. It was concluded that this discrepancy is caused by instrument drift and that the uncertainty due to drift is underestimated. It can also be noted from Fig. 1 that there are a number of points that are much more biased than is expected by the drift plots. We can see that the estimated uncertainty does not cover the possible difference and we recommend to always calibrate DO sensors before making measurements if accurate results are needed. In order to prove that the difference is caused by drift, we calibrated both sensors and made a new measurement in the same location a couple of days later (Lake Ilmatsalu 2). In this case, the estimated uncertainties are lower and at the same time, results are in good agreement according to the En number.
Conclusions
Accurate DO measurements are important in a variety of fields, and especially in environmental analyses. Two different types of analyzers (amperometric and optic) are commonly used for DO sensing and they have different performance characteristics and sources of measurement uncertainty. We systematically evaluated two DO sensors functioning on these two different measurement techniques to give detailed comparisons of their performance characteristics and measurement uncertainty sources. The following performance characteristics were evaluated: drift, intermediate precision, accuracy of temperature compensation, accuracy of reading (under different measurement conditions) linearity, flow dependence of the reading, repeatability (reading stability), and matrix effects of dissolved salts. Though the two sensors that were evaluated function on different working principles, the results cannot be automatically attributed to all other devices of the same working principle. Future studies should be done to validate a variety of DO sensors of these types. Still, the general results are applicable to those wishing to make accurate DO measurements. On the basis of the presented results, the following recommendations can be given:
It is important to recalibrate the sensor often (preferably every day before measurements). Even more important is to do it correctly, ensuring that the environment is carefully saturated for the 100% point calibration and that it is completely oxygen-free for the zero point calibration and that sensor readings are stabilized in the calibration environment before recording. For the amperometric sensor, it is important to check the zero and carry out maintenance as needed—as the difference between calibration and measurement temperatures is an important uncertainty source (especially in case of the amperometric sensor). We recommend calibrating the sensor at a temperature that is as similar as possible to the temperature of measurements.
It is important to always carefully wait for temperature and reading stabilization (both while calibrating and while measuring) until the reading is no longer changing. If the measurement is carried out in some environment where oxygen content changes in time, then a stabilization time of at least 10 min should be allowed before taking the reading. This is more important in the case of the optical sensor, because stabilization times of the optical sensor tend to be longer than those of the amperometric sensor.
Amperometric sensors (but not optical) are very sensitive to the liquid movement. For better results, the amperometric sensor requires the same flow rate during calibration and measurement. Some manufacturers have already found the solution to this problem by supplying their sensors with built-in stirrers that generate a constant liquid flow near the measurement head. It is important to add, however, that in measurements involving strongly oversaturated or strongly undersaturated solutions, stirring can increase the speed of releasing oxygen from solution or absorbing oxygen from air, respectively, which can lead to erroneous results.
As it can be seen from Table 3, the estimated measurement uncertainties of the two types of sensors are quite similar, so choosing between the two sensor types is largely a matter of preference. Due to minimal maintenance and insensitivity to liquid flow, the authors are slightly inclined towards using optical sensors. However, the preference could vary depending on the experimental setup and conditions required for different applications.
References
Benson, B. B., & Krause, D. (1980). The concentration and isotopic fractionation of gases dissolved in freshwater in equilibrium with the atmosphere. 1. Oxygen: Oxygen in freshwater. Limnology and Oceanography, 25, 662–671. https://doi.org/10.4319/lo.1980.25.4.0662.
Benson, B. B., & Krause, D. (1984). The concentration and isotopic fractionation of oxygen dissolved in freshwater and seawater in equilibrium with the atmosphere. Limnology and Oceanography, 29, 620–632. https://doi.org/10.4319/lo.1984.29.3.0620.
Clesceri, L. S., & American Public Health Association, American Water Works Association, and Water Pollution Control Federation (Eds.). (1998). Standard methods: for the examination of water and wastewater (20th ed.). Washington: American Public Health Ass.
Diaz, R. J., & Rosenberg, R. (2008). Spreading dead zones and consequences for marine ecosystems. Science, 321, 926–929. https://doi.org/10.1126/science.1156401.
Garcia, H. E., Locarnini, R. A., Boyer, T. P., Antonov, J. I., Baranova, O. K., Zweng, M. M., et al. (2010). World ocean atlas 2009 Volume 3: Dissolved Oxygen, Apparent Oxygen Utilization, and Oxygen Saturation. Sydney Levitus, Ed. Washington, D.C.: NOAA Atlas NESDIS 70, U.S. Government Printing Office Available at: http://www.nodc.noaa.gov/OC5/indprod.html.
Gewehr, P. M., & Delpy, D. T. (1993). Optical oxygen sensor based on phosphorescence lifetime quenching and employing a polymer immobilised metalloporphyrin probe. Medical & Biological Engineering & Computing, 31, 2–10. https://doi.org/10.1007/BF02446879.
Gillanders, R. N., Tedford, M. C., Crilly, P. J., & Bailey, R. T. (2005). A composite thin film optical sensor for dissolved oxygen in contaminated aqueous environments. Analytica Chimica Acta, 545, 189–194. https://doi.org/10.1016/j.aca.2005.04.086.
HACH Company. (2006). HQ series portable meters, USER MANUAL, edition 5.
Häck, M. (2006). Optical measurement of oxygen concentration in water. Available at: https://cz.hach.com/cms/documents/parameter-4-downloads-1.pdf. Accessed December 7, 2017.
Hellat, K., Mashirin, A., Nei, L., & Tenno, T. (1986). Metrological garanteeing of devices for measuring oxygen in the water. Acta et Commentationes Universitatis Tartuensis de Mathematica, 757, 184–193.
Helm, I., Jalukse, L., & Leito, I. (2010). Measurement uncertainty estimation in Amperometric sensors: a tutorial review. Sensors, 10, 4430–4455. https://doi.org/10.3390/s100504430.
Helm, I., Jalukse, L., & Leito, I. (2012). A highly accurate method for determination of dissolved oxygen: gravimetric Winkler method. Analytica Chimica Acta, 741, 21–31. https://doi.org/10.1016/j.aca.2012.06.049.
Hitchman, M. L. (1978). Measurement of dissolved oxygen. Canada: Wiley Limited Available at: https://books.google.ee/books?id=1qUPAQAAMAAJ.
ISO 17289:2014. (2014). Water quality—determination of dissolved oxygen—Optical sensor method.
ISO 5814:2012. (2012). Water quality. Determination of dissolved oxygen. Electrochemical probe method.
ISO/IEC 17043:2010. (2010). Conformity assessment—general requirements for proficiency testing (This standard replaces the ISO Guides 43–1 and 43–2).
Jalukse, L., & Leito, I. (2007). Model-based measurement uncertainty estimation in amperometric dissolved oxygen concentration measurement. Measurement Science and Technology, 18, 1877–1886.
JCGM 100:2008. (2008). Evaluation of measurement data—guide to the expression of uncertainty in measurement. Available at: https://www.bipm.org/utils/common/documents/jcgm/JCGM_100_2008_E.pdf.
Jessen, G. L., Lichtschlag, A., Ramette, A., Pantoja, S., Rossel, P. E., Schubert, C. J., Struck, U., & Boetius, A. (2017). Hypoxia causes preservation of labile organic matter and changes seafloor microbial community composition (Black Sea). Science Advances, 3, e1601897. https://doi.org/10.1126/sciadv.1601897.
Kragten, J. (1994). Tutorial review. Calculating standard deviations and confidence intervals with a universally applicable spreadsheet technique. The Analyst, 119, 2161. https://doi.org/10.1039/an9941902161.
Lakowicz, J. R. (Ed.). (2006). Principles of fluorescence spectroscopy (3rd ed.). Boston: Springer US. https://doi.org/10.1007/978-0-387-46312-4.
Langie, B., & Lewandow, M. (1999). Comparison between polarographic and galvanic dissolved oxygen sensor technologies. Available at: http://www.4oakton.com/TechTips/OAK_TT25.pdf. Accessed May 5, 2017.
Liu, H., Gu, Y., Kim, J. G., & Mason, R. P. (2004). Near-infrared spectroscopy and imaging of tumor vascular oxygenation. In Methods in Enzymology (pp. 349–378). Elsevier. https://doi.org/10.1016/S0076-6879(04)86017-8.
Magnusson, B., Näykky, T., Hovind, H., & Krysell, M. (2012). Handbook for calculation of measurement uncertainty in environmental laboratories (NT TR 537 - Edition 3.1). Available at: http://www.nordtest.info/index.php/technical-reports/item/handbook-for-calculation-of-measurement-uncertainty-in-environmental-laboratories-nt-tr-537-edition-3.html.
Mancy, K. H., & Jaffe, T. (1966). Analysis of dissolved oxygen in natural and waste waters. Cincinnati: U.S. Dept. of Health, Education, and Welfare, Robert A. Taft Sanitary Engineering Center.
McDonagh, C., Kolle, C., McEvoy, A. K., Dowling, D. L., Cafolla, A. A., Cullen, S. J., & MacCraith, B. D. (2001). Phase fluorometric dissolved oxygen sensor. Sensors and Actuators B: Chemical, 74, 124–130. https://doi.org/10.1016/S0925-4005(00)00721-8.
McDonagh, C., Burke, C. S., & MacCraith, B. D. (2008). Optical chemical sensors. Chemical Reviews, 108, 400–422. https://doi.org/10.1021/cr068102g.
McKeown, J. J., Brown, L. C., & Gove, G. W. (1967). Comparative studies of dissolved oxygen analysis methods. Journal - Water Pollution Control Federation, 39, 1323–1336.
Millero, F. J., Huang, F., & Graham, T. B. (2003). Solubility of oxygen in some 1-1, 2-1, 1-2, and 2-2 electrolytes as a function of concentration at 25°C. Journal of Solution Chemistry, 32, 473–487. https://doi.org/10.1023/A:1025301314462.
Mortimer, C. H. (1981). The oxygen content of air-saturated fresh waters over ranges of temperature and atmospheric pressure of limnological interest. Stuttgart: Schweizerbart Science Publishers Available at: http://www.schweizerbart.de//publications/detail/isbn/9783510520220/Mitteilungen_IVL_Nr_22.
Narayanaswamy, R., & Wolfbeis, O. S. (2004). Optical sensors. Berlin: Springer. https://doi.org/10.1007/978-3-662-09111-1.
Näykki, T., Jalukse, L., Helm, I., & Leito, I. (2013). Dissolved oxygen concentration interlaboratory comparison: what can we learn? Water, 5, 420–442. https://doi.org/10.3390/w5020420.
Pagano, T., Carcamo, N., & Kenny, J. E. (2014). Investigation of the fluorescence quenching of 1-aminoanthracene by dissolved oxygen in cyclohexane. The Journal of Physical Chemistry. A, 118, 11512–11520. https://doi.org/10.1021/jp5094806.
Ramamoorthy, R., Dutta, P. K., & Akbar, S. A. (2003). Oxygen sensors: materials, methods, designs and applications. Journal of Materials Science, 38, 4271–4282. https://doi.org/10.1023/A:1026370729205.
Schmidtko, S., Stramma, L., & Visbeck, M. (2017). Decline in global oceanic oxygen content during the past five decades. Nature, 542, 335–339.
Shaw, A. D., Li, Z., Thomas, Z., & Stevens, C. W. (2002). Assessment of tissue oxygen tension: comparison of dynamic fluorescence quenching and polarographic electrode technique. Critical Care, 6, 76–80.
Stetter, J. R., & Li, J. (2008). Amperometric gas sensors—a review. Chemical Reviews, 108, 352–366. https://doi.org/10.1021/cr0681039.
Stramma, L., Prince, E. D., Schmidtko, S., Luo, J., Hoolihan, J. P., Visbeck, M., Wallace, D. W. R., Brandt, P., & Körtzinger, A. (2011). Expansion of oxygen minimum zones may reduce available habitat for tropical pelagic fishes. Nature Climate Change, 2, 33–37.
Tengberg, A., Hovdenes, J., Andersson, H. J., Brocandel, O., Diaz, R., Hebert, D., Arnerich, T., Huber, C., Körtzinger, A., Khripounoff, A., Rey, F., Rönning, C., Schimanski, J., Sommer, S., & Stangelmayer, A. (2006). Evaluation of a lifetime-based optode to measure oxygen in aquatic systems: lifetime-based optode to measure oxygen. Limnology and Oceanography: Methods, 4, 7–17. https://doi.org/10.4319/lom.2006.4.7.
Wang, X., & Wolfbeis, O. S. (2014). Optical methods for sensing and imaging oxygen: materials, spectroscopies and applications. Chemical Society Reviews, 43, 3666–3761. https://doi.org/10.1039/C4CS00039K.
Weilheim, WTW GmbH & Co. (2002). KG Operating Manual, CellOx 325 Dissolved oxygen sensor. Available at: http://www.globalw.com/downloads/WQ/cellox325.pdf.
Xiao, D., Mo, Y., & Choi, M. M. F. (2003). A hand-held optical sensor for dissolved oxygen measurement. Measurement Science and Technology, 14, 862–867.
YSI. (n.d.). The dissolved oxygen handbook: a practical guide to dissolved oxygen measurements. Available at: http://www.vanwalt.com/pdf/information-sheets/Dissolved-Oxygen-Handbook.pdf. Accessed May 6, 2017.
Funding
This research was supported by the EU through the European Regional Development Fund (TK141 “Advanced materials and high-technology devices for energy recuperation systems”) and by the Ministry of Education and Science of Estonia (institutional research grant no. IUT20-14).
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Characteristics of the sensors and uncertainty calculations for the DO concentration data in different waters are available in the Electronic supplementary material.
ESM 1
(XLSX 183 KB)
Rights and permissions
About this article

Cite this article
Helm, I., Karina, G., Jalukse, L. et al. Comparative validation of amperometric and optical analyzers of dissolved oxygen: a case study. Environ Monit Assess 190, 313 (2018). https://doi.org/10.1007/s10661-018-6692-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10661-018-6692-5