
Abstract
Drift-feeding fish are challenged to discriminate between prey and similar-sized particles of debris, which are ubiquitous even in clear-water streams. Spending time and energy pursuing debris mistaken as prey could affect fish growth and the fitness potential of different foraging strategies. Our goal was to determine the extent to which debris influences drift-feeding fish in clear water under low-flow conditions when the distracting effect of debris should be at a minimum. We used high-definition video to measure the reactions of drift-feeding juvenile Chinook salmon (Oncorhynchus tshawytscha) to natural debris and prey in situ in the Chena River, Alaska. Among all potential food items fish pursued, 52 % were captured and quickly expelled from the mouth, 39 % were visually inspected but not captured, and only 9 % were ingested. Foraging attempt rate was only moderately correlated with ingestion rate (Kendall’s τ = 0.55), raising concerns about the common use of foraging attempts as a presumed index of foraging success. The total time fish spent handling debris increased linearly with foraging attempt rate and ranged between 4 and 25 % of total foraging time among observed groups. Our results help motivate a revised theoretical view of drift feeding that emphasizes prey detection and discrimination, incorporating ideas from signal detection theory and the study of visual attention in cognitive ecology. We discuss how these ideas could lead to better explanations and predictions of the spatial behavior, prey selection, and energy intake of drift-feeding fish.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Drift feeding is a foraging tactic used by many fishes in flowing water, in which they hold a steady upstream-facing position and visually search for drifting prey to intercept (Jenkins 1969). Visual searches in general are hindered by the presence of abundant non-target objects that resemble targets (Palmer 1995), so drift feeding by fish may be hindered by fine particles of leaf litter, insect exuviae, and other inedible debris that can resemble prey. Under certain light conditions, underwater video captures the remarkable visual prominence of debris, even in water that appears extremely clear (Fig. 1 and Online Resource 1). It seems challenging for drift-feeding fish to locate viable prey amidst this dynamic field of distracting debris in the brief moment before it passes their position. However, the effects of debris have received little attention in the voluminous literature on prey detection and the energy budgets of drift-feeding fish.

Videotaping fish amidst debris in clear water. a The 0.7-m deep water appears crystal clear from above; however, b it carries numerous fine debris particles, evident in comparison to c a version of the same image with the debris removed by averaging several video frames
Only one study to date has measured how debris affects drift-feeding behavior. In an artificial stream, adult Arctic grayling (Thymallus arcticus) reacted to prey at shorter distances and narrower angles in the presence of debris compared with prey-only controls (O'Brien and Showalter 1993). Just as fish may overlook distant prey in the presence of debris, they may also commit the opposite error—mistaking debris for prey and spending time and energy pursuing it. Many researchers have noted the occurrence of unsuccessful foraging attempts in which drift-feeding fish either captured and expelled inedible items or investigated items they did not attempt to capture (e.g. Irvine and Northcote 1982; Bachman 1984; McNicol et al. 1985; Kiflawi and Genin 1997). However, the frequency of unsuccessful foraging attempts has not been reported, so we do not yet understand their energetic costs or implications for drift-feeding theory.
Hypotheses about the effects of debris on drift-feeding fish may be informed by two studies of recently emerged age-0 brook trout (Salvelinus fontinalis) in still water. In a lake, age-0 brook trout ingested only 46 % of items they captured (Biro et al. 1996). In still pools along the margins of streams, age-0 brook trout ingested 80 % of items they captured, but they had captured only 54 % of the items they attacked (McLaughlin et al. 2000). Foraging attempt rate (McLaughlin et al. 2000) and capture rate (Biro et al. 1996) were only moderate predictors of the rate at which real prey were ingested, casting doubt on the reliability of foraging attempt rate as a commonly used index of foraging success. Fish in flowing water might have to contend with much more mid-water debris than fish in still water, because particles in streams are easily re-suspended by turbulence and can travel hundreds of meters before settling (Webster et al. 1999). Because of this debris density, and the difficulty of discriminating among objects moving at high speed, we anticipate that drift-feeding fish pursue and reject far more mid-water debris than their still-water counterparts.
Visually or physically reacting to debris might affect the profitability of different foraging strategies, creating behavioral tradeoffs. An overly discriminating fish might fail to react to actual prey, while an overly aggressive one might waste too much time pursuing debris. All else being equal, a fish feeding in swift current encounters more prey than it would in slow current, but it has less time to distinguish prey from debris, creating a speed-accuracy tradeoff (Abbott and Sherratt 2013). Further tradeoffs might arise from the constraint that animals have limited visual attention—the cognitive mechanism that “turns looking into seeing” (Carrasco 2011). Selectively allocating attention among different prey types or different regions of the visual field might improve a fish’s ability to discriminate between debris and prey, but only for the selected prey types or visual angles. When discrimination is difficult, attention tradeoffs can lead to search image formation (Dukas and Kamil 2001), which might explain why drift-feeding salmonids often temporarily specialize on a single prey type, even when many others are available (Allen 1941; Bryan and Larkin 1972; Bisson 1978; Ringler 1979; Ringler 1985).
Mechanistic models that simulate drift-feeding processes (e.g., Hughes and Dill 1990; Dunbrack 1992; Kiflawi and Genin 1997; Guensch et al. 2001) might benefit from incorporating debris-related tradeoffs. Such models have diverse applications including predicting habitat quality (Nislow et al. 2000; Jenkins and Keeley 2010), microhabitat selection (Guensch et al. 2001; Grossman et al. 2002; Hayes et al. 2007), prey selection (Grant and Noakes 1986; Hughes et al. 2003), and growth (Fausch 1984; Hayes et al. 2000). Foraging models are frequently important components of broader, individual-based models that simulate the population-level consequences of mechanisms that act on individuals (Van Winkle et al. 1998; Gowan and Fausch 2002; Harvey and Railsback 2007). Drift-feeding model predictions can depend on the time and energy fish spend pursuing and manipulating prey, but current models do not include the analogous costs of handling debris.
Current mechanistic drift-feeding models also disregard the potential for debris to hinder prey detection by attention-limited fish. Incorporating this effect might resolve a long-recognized problem with one of the models’ key functions: predicting the distance at which fish react to prey. Visual acuity alone does not fully determine reaction distance, because reaction distance decreases as current velocity increases under otherwise identical visual conditions (Hill and Grossman 1993; O'Brien and Showalter 1993; Piccolo et al. 2008a). Mechanistic drift-feeding models capture this dependence on water velocity by using rigid geometric assumptions (Hughes and Dill 1990) that consistently fail observational tests (Hughes et al. 2003). An alternative explanation for the velocity relationship is that fish with finite visual attention can only productively search and discriminate prey from debris within a limited volume of water per unit time, so fish in swifter current must focus on a smaller region to maintain their ability to detect prey (Dukas 2002). This idea represents a crucial shift in perspective, viewing not only physical but also cognitive constraints as key determinants of the behavior and success of drift-feeding fish. However, we lack quantitative data regarding whether wild, drift-feeding fish react to debris to an extent that warrants such a fundamental change in our mechanistic understanding.
To measure the influence of debris on drift-feeding fish under low-flow conditions, we observed the reactions of juvenile Chinoook salmon (Oncorhynchus tshawytscha) to natural prey and debris in the main channel of a mid-order clear-water stream. We sought to 1) measure how many foraging attempts were directed at debris versus prey, 2) measure the spatial and temporal characteristics of these attempts to assess their relevance to foraging models, 3) determine whether foraging attempt rate predicts ingestion rate, and 4) measure the variation in these responses within and among groups of fish under different conditions. The first and third objectives partly mirror Biro et al. (1996) and McLaughlin et al. (2000), but differ in our focus on a different species, exhibiting a different type of feeding behavior, in flowing instead of still water, and over a longer period of time. We discuss what our findings imply about the interpretation of drift-feeding behavior, and we outline some ways drift-feeding theory might be improved by incorporating the tradeoffs involved in detecting prey amidst debris under the constraint of limited visual attention.
Materials and methods
Study system
The Chena River is a clear-water, 5th-order tributary of the Tanana River in the Yukon River drainage in central Alaska. We observed fish in 2009 and 2010 in a reach from 100 to 160 km upstream from the confluence of the Chena with the Tanana. Median discharge in this reach from June through September was 25 m3 /s (calculated using 1968 to 2011 data from USGS hydrograph #15493000 near Two Rivers, AK). Drift nets samples collected from this reach contained an amount of debris similar to that observed in many other clear-water streams throughout Alaska and the Pacific northwest (M. Wipfli, personal observation), suggesting that the Chena is representative of “typical” debris conditions. Most prey-sized debris particles were fragments of plant matter in varied shapes and shades of brown. A much smaller but substantial portion consisted of insect exuviae, noteworthy for their resemblance to the insects that shed them.
The stream-type Chinook salmon in the Chena emerge from the gravel in late May and early June, feed all summer and overwinter in the river system, and then migrate downstream to the Bering Sea the following spring. In this river, their diverse diet of aquatic and terrestrial invertebrates is dominated by the aquatic families Chironomidae (Diptera), Chloroperlidae (Plecoptera), and Baetidae (Ephemeroptera) in the 1- to 5-mm length range, although many other taxa are locally important at times (Gutierrez 2011).
We chose specific observation sites within our study reach by locating schools of foraging juvenile Chinook salmon in positions amenable to capturing video footage with enough detail to discern foraging attempt outcomes. Visual criteria included the uniformity and brightness of lighting, proximity of fish to a possible camera mounting point, and field-of-view. We chose schools of fish associated with well-defined structures along the margins of the river, such as root wads or gaps inside logjams, because such schools reliably returned to their positions after we disturbed them by placing the cameras. The depths at all observations sites were much greater than the prey reaction distances of fish, so depth did not constrain prey captures. All recordings were made in low flow conditions (below median summer flow) when water was clear (Fig. 1a). Within these practical constraints, we chose sites and times to represent a broad range of water depths, current velocities, water temperatures, and dates (Table 1). Each sampling date represents observations of a single group of fish.
Video recording and processing
We recorded schools of drift-feeding fish at close range (0.2 to 2 m) using a stationary stereo pair of Sony® HDR-SR12 high-definition digital video cameras inside Ikelite® #6038.94 underwater housings with Zen Underwater® WAVP-80 wide-angle dome ports. Videos were analyzed using VidSync software (http://vidsync.sourceforge.net), which allows calculating 3-dimensional (3-D) positions from multiple camera views with sub-millimeter precision, organizing measurements according to object (e.g., individual fish) and measurement type (e.g., a foraging attempt or a fish fork length), coding of measurements (e.g., foraging attempt outcomes), and fine-scale playback control with a magnified preview of an area of interest (Neuswanger J, Wipfli MS, Rosenberger AE and Hughes NF, Measuring fish and their habitats: Versatile 2-D and 3-D video techniques with user-friendly software (in preparation)). Despite cautious site selection and high quality cameras, many videos did not capture the fine detail necessary to discern the outcomes of most foraging attempts; therefore, we analyzed only the nearest several (five to twelve) fish to the cameras in each of the five best recordings, totaling 35 individual fish (see Online Resource 2 for short clips from each recording). These videos were representative of typical behavior observed qualitatively under a wider range of conditions.
In each video selected for analysis, a starting time was chosen at least ten minutes after the last visible disturbance associated with camera placement, by which time the fish had resumed pre-disturbance position and behavior for several minutes. A subject fish was chosen and its activity recorded until at least 25 foraging attempts were measured, or until it swam off-screen permanently. Some fish that swam off-screen returned later and were identified by their parr marks, in which case analysis continued and the missed time was noted. Each fish’s length was measured as the distance between the tip of its upper jaw and the fork of its tail when its body was nearly straight. Rates (e.g., foraging attempts per minute) were calculated based on the amount of time each fish was observed on screen. In addition to fish data, we calculated a mean water velocity vector for the foraging area by averaging the trajectories of 10 natural debris particles.
To gauge the potential effects of competition on debris reactions, we calculated nearest-neighbor distances for all visible fish in each school we analyzed. These were the 3-D Euclidean distances from the tip of the snout of each fish to that of its nearest neighbor. Nearest-neighbor distances were calculated from video frames at five-minute intervals throughout an approximately 90-min period. These calculations included, but were not limited to, the specific individuals and time ranges for which detailed foraging records were obtained.
Classifying foraging attempt outcomes
We classified all foraging attempts with discernable outcomes into three mutually exclusive categories: 1) “inspections,” in which fish moved to investigate items but did not capture them; 2) “expulsions,” in which fish captured and then expelled items from their mouths (colloquially, “spit them out”); and 3) “ingestions,” in which fish captured items they did not appear to expel. See Online Resource 3 for video examples. Inspections and expulsions were both types of “rejections,” and expulsions and ingestions were both types of “captures.” Rejected items were assumed to be debris, although a few might be unpalatable prey. Any foraging maneuver culminating in the fish widely opening its mouth was assumed to be a capture, because we observed no evidence of misses or evasive prey. When a foraging attempt’s outcome could not be discerned, it was classified as “unclear,” and was used for spatiotemporal and rate analyses (e.g., foraging attempts per second) but not for analyses of outcomes. Observational ambiguity persisted in some of the attempts we deemed discernable, which motivated the development of detailed classification conventions designed to err (when unavoidable) toward conservatively estimating the fish’s time, energy, and attentive involvement with debris.
Inspections
Fish made a range of motions that did not culminate in opening their mouths to capture drifting items. Motions were classified as inspections of potential prey if they began and ended with sudden changes of body orientation or if the particles of interest were clearly visible. These stringent criteria were necessary to avoid counting both brief and extended motions made for other reasons. However, some confirmed captures would not have met these criteria, so it is likely that inspections were undercounted and our numbers represent only the most unambiguously observable portion of a continuum of debris-related distractions ranging from quick visual fixations (with no body motion at all) to pursuits lasting several seconds.
Expulsions
We directly observed many particles expelled from the mouths of fish after capture. However, despite our use of modern high-definition cameras, video quality still limited our ability to visually confirm expulsions. Many expulsions required repeated viewings in slow motion at 2.5x magnification, and in some cases, we could not see the expelled particle at all. However, the motion characteristic of confirmed expulsions was distinctive—opening and closing the mouth one time, approximately 1 s (range 0.5–3 s) after capture. For fish of which we had superb views (those very close to the cameras and well-illuminated against a dark, low-contrast background), this characteristic motion was almost always associated with a visibly expelled particle. We therefore considered observations of this motion to be indirect observations of expulsion. However, a few indirectly observed expulsions might have actually been swallowing manipulations; likewise, some subtle expulsions may have been missed and reported as ingestions. Both errors were probably rare and should partially offset each other.
Ingestions
In straightforward observations of ingestions, particles were clearly captured without expulsion or further manipulation. In other cases, fish repeatedly and irregularly opened and closed their mouths after capture, as if manipulating an item to swallow. These manipulations very rarely culminated in visible particle expulsions, so we classified them as ingestions unless an expelled particle was visible. We assumed all ingested items were prey, in agreement with a concurrent diet study that found almost no debris in the stomachs of juvenile Chinook salmon from the same population (Gutierrez 2011).
Spatiotemporal measurements of foraging attempts
To measure the trajectories and elapsed times for different stages of each foraging attempt, we recorded timecodes (to the nearest frame, i.e. 1/30 s) and 3-D coordinates of fish position (measured at the tip of the upper jaw) at multiple points of interest. Foraging attempts that occurred off-screen in one camera but on-screen in another were used to calculate times but not distances. Making the assumption that fish reacted to items immediately upon detecting them, we recorded detection positions in the frame immediately preceding movement toward an item. We then recorded either capture position (in the first frame with maximum mouth gape during capture) or visual rejection position (in the frame preceding a turn away from the item). When particles were captured and either expelled or extensively manipulated for ingestion, we recorded the end of involvement (the first frame of maximum mouth gape during expulsion or the last of a series of manipulations for ingestion). These measurement conventions conservatively estimated total involvement time for both captures and inspections, effectively assuming that all time before the first motion and after the maximum mouth gape or shift of direction was available for searching for other items. Use of conservative estimates seemed justified based on occasional observations of back-to-back foraging attempts separated by less than 1/15 s.
For each foraging attempt measured as described above, we calculated pursuit time, pursuit distance, and pursuit speed based the difference between the reaction position and the capture or visual rejection position. We calculated the time to expel an item as the elapsed time between capture and expulsion. We calculated how far downstream the fish pursued the item as the shortest distance from the capture position to a plane passing through the detection position perpendicular to the mean current velocity vector. We estimated detection distance under the assumptions that the trajectory of the particle followed the mean current velocity vector through the foraging area, and that the particle was at the fish’s position at the time of capture (a valid assumption) or the time at which point the fish turned away from it (only sometimes valid). From that position, the particle’s position was back-calculated along the mean velocity vector to the point in time at which the fish first reacted; this was taken to be the position of the particle at detection, and the distance between this point and the fish’s position at detection was taken to be the detection distance.
Statistical analysis
To describe the relative magnitude of variation in prey capture outcomes among individuals within a group, compared to variation across different groups (which were each filmed on different dates, in different sites), we used two logistic regressions with group and individual as nominal independent variables. One regression was performed on all discernable-outcome foraging attempts, with capture as the dependent variable. The other was performed on all captures, with ingestion as the dependent variable. We reported results from deviance tables for these regressions, roughly analogous to sums of squares in ANOVA models for continuous predictors.
To evaluate foraging attempt rate as a predictor of ingestion rate, we replicated the way Biro et al. (1996) and McLaughlin et al. (2000) used distribution-free regression and correlation analysis (Hollander and Wolfe 1999), because it is not strongly affected by the part-whole correlation between ingestions (the “part”) and total foraging attempts (the “whole” of which ingestions are a part) (Biro et al. 1996). We calculated Kendall’s population correlation coefficient τ, a rank comparison statistic with a value of 0 if foraging attempt rate and ingestion rate are independent. This coefficient determines the more easily interpreted distribution-free parameter Y = (1 + τ)/2, which represents the probability that an individual fish with a higher attempt rate than another individual also had a higher ingestion rate. A value of Y = 0.5 would indicate that attempt rate had no value as a predictor of ingestion rate. To calculate the slope and intercept of the relationship between foraging attempt rate and ingestion rate, we used distribution-free regression based on the Theil statistic C.
Additional statistics supported two minor points. We used the Kruskall-Wallis test (Kutner et al. 2005) to determine whether the pursuit time (the time between reacting to an item and capturing or visually rejecting it) differed between all captures and all visual rejections on each date, as might be expected if more convincingly prey-like items elicit a response from a greater distance. Also, we used standard, parametric linear regression to test the significance of a relationship between the daily means of foraging attempt rate and the time spent handling items.
Results
We observed 35 fish on five separate dates making a total of 930 foraging attempts, of which 837 had discernible outcomes and 867 had usable 3-D spatial coordinates (were not partially off-screen). Almost all foraging took place in mid-water. Only seven attempts were directed toward the surface, and three were aimed at benthic targets. Fish moved only 4.4 ± 3.1 cm (mean ± standard deviation) during foraging attempts (Fig. 2a), which terminated in capture or visual rejection at a distance of 0.8 ± 2.8 cm downstream of the detection position (i.e., downstream of a plane passing through the detection position perpendicular to the current direction) (Fig. 2b). Items were pursued at a speed of 6.3 ± 3.6 cm/s. Particles were detected from an estimated distance of 6.3 ± 3.7 cm, and 99 % of items were detected within 17.1 cm (Fig. 2c).

Histograms for all measurement dates combined of a the distance a fish moved during its reaction to an item, prior to capture or visual rejection b distance from the detection point to the capture or visual rejection point along the upstream-downstream axis (negative values mean the fish moved upstream to capture the item), c the estimated distance of an item from the fish’s snout when it was detected, under the assumption that reaction immediately followed detection, d the time between a fish’s initial reaction to an item and capturing or rejecting it, e the time to spit an item out after capturing it, and f the pursuit distance divided by pursuit time
Overall, fish captured 61 % of the items to which they visibly reacted, and they ingested 15 % of the items they captured. Combined, 9.4 % of all foraging attempts led to ingestion, 52.0 % led to capture and expulsion, and 38.6 % were inspections without capture. These results were qualitatively similar for all five groups of fish (Fig. 3a). The probability of an attempt culminating in capture varied to a similar degree within and among groups of fish (logistic regression, N = 837, deviance within groups = 44.1, deviance among groups = 41.9, residual deviance = 1030.4). The probability of ingestion following capture varied more within groups than among groups (logistic regression, N = 514, deviance within groups = 39.5, deviance among groups = 8.9, residual deviance = 392.6).

Foraging effort categorized according to whether the item was inspected and rejected, captured and expelled, or captured and ingested. a All foraging attempts with clear outcomes by all fish were combined for each date. b The total time spent on foraging attempts with each outcome is shown as a percentage of total foraging time observed for all fish. Searching time as used here includes all time not spent pursuing or handling items, including any unmeasured time allocated to competition or watching for predators. c The bars from part a are subdivided by individual fish, for comparison of within-group versus among-group variation. Foraging attempts with unclear outcomes (fewer than 15 % of attempts on any date) were not included here, and time spent on them (less than 1.5 % of total time on any date) was proportionally allocated to the other attempt types for comparison with searching time. Numbers above each bar indicate the number of foraging attempts observed (in a and c) and the number of minutes observed for all fish combined (in b)
The proportion of total foraging time spent pursuing and manipulating items (percent handling time) ranged between 4.5 % and 27.1 % for different groups of fish (Table 2), and most of that time (3.5 % to 24.9 %) was spent handling debris items that were inspected without capture or captured and expelled (Fig. 3b). The mean handling time per item was 1.16 s. This mean was fairly consistent among groups (ranging from 0.94 to 1.29 s), which implies that the large variation in overall percent handling time resulted mostly from the large variation in foraging attempt rate, with which the percent handling time increased linearly (linear regression, R 2 = 0.86; N = 5; P = 0.02).
Subdividing handling time by activity shows that foraging attempts with stages beyond the initial pursuit contributed disproportionately to total percent handling time. The overall time between reacting to an item and capturing or visually rejecting it was 0.72 ± 0.34 s (mean ± standard deviation, Fig. 2d) and did not differ significantly between captures and visual rejections (Kruskal-Wallis tests for each date individually, P > 0.25 in all cases). Expelling a captured item took 0.67 ± 0.47 s (Fig. 2e), and the relatively rare events in which an item was repeatedly manipulated prior to assumed ingestion took 3.53 ± 1.93 s. Handling time did not appear to continue beyond the stages described above, as might be expected if fish waited to resume searching until they had returned to a focal position. Instead, fish often began a new pursuit immediately (within 1/15 s) following a rejection.
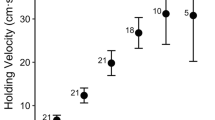
Foraging attempt rate was moderately related to ingestion rate across all fish combined (N = 35). Kendall’s τ was 0.553 (95 % C.I.: 0.358–0.748). The estimate of the probability Y that, in comparing two fish, the fish with the higher foraging attempt rate also had a higher ingestion rate was 0.78 (0.68–0.87). The distribution-free regression line for foraging attempt rate as a predictor of ingestion rate had a shallow slope of 0.108 (0.072–0.150) and an intercept of −0.019 (−0.249−0.060), indicating that foraging attempt rate greatly underestimated ingestion rate (Fig. 4).

Foraging attempt rate underestimates ingestion rate. A solid line was fitted by distribution-free regression through data points for all fish from all dates (circles), showing that ingestion rate increased slowly but significantly with foraging attempt rate in a highly variable relationship. If all foraging attempts were ingestions, the regression line would overlay the dotted line, which represents a 1:1 relationship
Discussion
Under low-flow conditions in the clear-water Chena River, drift-feeding juvenile Chinook salmon pursued and captured far more debris than prey. Some observed groups spent enough time pursuing and processing debris to substantially reduce their energy intake rates. Analysis of deviance showed that the variation in debris pursuit behavior among groups of fish filmed on different dates (Fig. 3a) was smaller than the variation among individuals within groups (Fig. 3c), which suggests that water velocity, water temperature, and fish size and age did not greatly modulate the effect of debris within the range of conditions represented in our observations. Although this study was the first to measure a strong effect of debris on drift-feeding fish in the wild, it is consistent with still-water results (Biro et al. 1996; McLaughlin et al. 2000) and with qualitative observations of failed foraging attempts by drift-feeding fish (Irvine and Northcote 1982; Bachman 1984; Kiflawi and Genin 1997). Although debris effects likely vary among different streams, species, life stages, and environmental conditions, our demonstration of strong effects in a clear-water river under low-flow conditions suggests involvement with debris is often an unavoidable part of the drift-feeding process. The observed magnitude and likely generality of debris effects motivate consideration of the cognitive mechanisms underlying prey discrimination. In the section on attention and signal detection, we discuss how these cognitive concepts might form the foundation of new drift-feeding models that explain important empirical results current models either contradict or do not address.
Foraging attempt rate as a predictor of ingestion rate
We investigated two distinct aspects of the relationship between foraging attempts and ingestion. First, we found that foraging attempt rate (items/minute) was not a good direct estimate of ingestion rate (items/minute). The shallow slope (0.108) of the regression line in Fig. 4 indicated that attempt rate greatly overestimated ingestion rate, a fact also reflected in the low frequency of ingestions (only 9 %) among all foraging attempts.
The second distinct question was whether foraging attempt rate was sufficiently correlated with ingestion rate to be a useful predictor, despite its overestimation. In pairwise comparisons of all individual fish across all dates, the individual with the higher foraging attempt rate also had a higher ingestion rate with probability Y = 0.78, corresponding to a value of Kendall’s population correlation coefficient τ = 0.553. A similar result was reported for age-0 brook trout feeding in still-water streamside pools (Y = 0.76; [McLaughlin et al. 2000]), and for capture rate (not attempt rate) as a predictor of ingestion rate for age-0 brook trout in a lake (Y = 0.77; Biro et al. [1996]). These results together suggest that foraging attempt rate and capture rate should be used cautiously, if at all, as predictors of ingestion rate (i.e. indices of fitness) in both still and flowing water.
Marked differences between our results and the above-cited still water studies are consistent with expected differences between the two habitats. Both still water studies reported that fish ingested more than 90 % of items they captured mid-water, but overall ingestion frequencies were lower (46 % in a lake, 80 % in still pools) because fewer items captured from the surface were ingested (1 % in a lake, about 60 % in still pools). In our observations, which were almost all (830/837) mid-water, drift-feeding fish ingested far fewer—only 15 %—of the items they captured. McLaughlin et al. (2000) also found that brook trout were less likely to ingest a captured item if they detected it while moving. This is consistent with our observation of a much lower mid-water ingestion frequency in drift-feeding fish, because flowing water guarantees motion between fish and prey. Further, drift-feeding fish have less time to inspect each item before losing the opportunity, and flowing water suspends more mid-water debris that would quickly settle out of still water.
Energy intake rate
The proportion of total foraging time fish spent handling debris (3.5 % to 24.9 %; Fig. 3b) corresponds to an equal reduction in search time and energy intake rate, assuming that search and handling are mutually exclusive activities. This assumption appeared valid in our videos; fish almost never changed course mid-pursuit to react to new items, nor did they react to new items prior to expelling captured items. The energy cost of maneuvering to intercept potential prey is higher than the cost of holding a steady position (Hughes and Kelly 1996), so spending almost 25 % of all foraging time engaged in such maneuvers could decrease net energy intake beyond what would be expected from lost time alone. The time spent handling debris is important to foraging models that incorporate the logic of Holling’s (1959) disc equation, which predicts that energy intake rate increases with prey encounter rate asymptotically, instead of linearly, because of handling time. However, we have shown that total handling time can depend more on debris encounters than prey encounters, so debris can greatly influence this functional response.
Spending a large percentage of time handling debris is not necessarily an ineffective feeding strategy. Instead, it can be a side effect of foraging in swifter current, which may increase prey encounter rate to a degree that compensates for the time lost handling debris. Two of the groups we studied (June 28 and September 15) exemplified this effect. They spent more time handling debris than the others because they were feeding in faster water (Table 1) and had higher overall foraging rates, which also led to higher ingestion rates (Table 2). In this case, debris did not eliminate the benefit of high overall encounter rate; it only reduced the potential benefit. This reduction should be incorporated into models of energy intake, which could overestimate energy intake by up to 33 % if they ignore debris handling time. Bioenergetics models (e.g., Elliott and Hurley 1999) show that a difference of this magnitude in energy intake rate can make a large difference in growth rate.
Generality of debris effects
The effects of debris on drift feeding persisted under diverse conditions throughout the first summer of feeding for fish between 35 and 75 mm fork length (Table 2); debris likely affects most other drift-feeding fish, but to a highly variable degree. We detected no evidence that fish reacted to debris less often as they grew and gained experience (i.e., on later sampling dates; Fig. 3a), contrasting with the finding of McLaughlin et al. (2000) that larger brook trout within the 20- to 30-mm fork length range were more likely than smaller fish in that range to capture items they attacked and to ingest items they captured. Their finding may reflect larger fish learning to better discriminate prey without pursuit, developing improved eyesight, more effectively pursuing evasive prey, or any combination thereof. The absence of this size-based relationship in our data, despite our observing fish over a longer time period and size range, may reflect limited statistical power to detect this relationship in results dominated by larger sources of variation such as water velocity; or it may reflect the greater difficulty of discriminating prey while drift feeding compared to feeding in still water. Though encompassing a greater size range than prior studies, our observations were confined to young-of-the-year fish, and greater changes with size may be evident in other species that drift feed for more than one year.
In addition to visual and cognitive improvements with size and experience, we might expect the distracting effect of debris to diminish for larger fish that focus on larger prey, because larger debris is less abundant and larger fish might easily ignore debris smaller than their prey. However, larger fish often feed in faster water and have greater reaction distances, both of which may increase the debris encounter rate and make prey discrimination more difficult. Even for large trout feeding in water with extraordinarily scarce debris, the drifting exuviae of insect prey may trigger enough foraging attempts to substantially bias estimates of energy intake based on visual estimates of foraging attempt rate (John Hayes, Cawthron Institute, NZ, personal communication). The effect of debris on larger fish is therefore an open and interesting question.
The propensity of fish to pursue debris might also be increased by pressure from competitors. Pursued items were often detected at distances greater than half the mean distance between each fish and its nearest neighbor (Table 2), although not always in the direction of the nearest neighbor. This partial overlap of detection volumes led to very rare conflicts (four total observed) in which two fish pursued the same item simultaneously. The rarity of these conflicts, and the similar frequency of debris pursuits among groups with relatively large (i.e. July 9) and small (i.e. June 11) nearest-neighbor distances, suggest that competition did not greatly influence debris pursuits in our observations. The decision of whether or not to pursue each item was probably pressured more by the risk of the item drifting out of reach than by the risk of the item being captured by a competitor. This tradeoff could change in other groups with tighter spacing relative to individual reaction distances.
Our finding that debris is important even under clear, low-flow conditions suggests significant consequences for drift-feeding fish when disturbances introduce more debris. A high rate of debris pursuits was not detrimental to fish in our study because it was a consequence of a higher overall encounter rate in faster water, which also increased prey encounters. However, some disturbance events might increase debris without a proportional increase in prey, reducing foraging success. In a concurrent diet study of our study population, juvenile Chinook salmon had less food in their stomachs during floods (Gutierrez 2011). Further, Chinook salmon recruitment in the Chena River is significantly worse for year classes that experienced a high median flow during the summer they spent in freshwater, and this effect was not associated with extreme flood events (Neuswanger J, Wipfli MS, Rosenberger AE and Hughes NF, Measuring fish and their habitats: Versatile 2-D and 3-D video techniques with user-friendly software (in preparation)). The negative effects of prolonged, moderately high water on primary productivity (Benson et al. 2013), foraging conditions (including debris density), or some combination thereof may strongly influence recruitment in this system.
Limited attention and signal detection in drift feeding
The difficulty experienced by juvenile Chinook salmon in discriminating prey from debris raises questions about the cognitive process of visual attention that controls prey detection and discrimination. Experiments have shown reduction in drift-feeding performance when predation risk (Metcalfe et al. 1987), competition (Hazelton and Grossman 2009), or debris (O'Brien and Showalter 1993) compete with food for a fish’s visual attention. Here we discuss how limited visual attention might influence the spatial behavior and prey selection tactics of drift-feeding fish and how an understanding of these effects might help resolve recognized problems with current drift-feeding models.
Visual attention and the control of reaction volumes
Empirical observations about the relationship between water velocity, reaction distance, and prey detection probability are central to the predictions of energy intake and habitat selection in drift-feeding models. Reaction volumes narrow as water velocity increases (Hill and Grossman 1993; O'Brien and Showalter 1993; Piccolo et al. 2008a), and detection probability within the reaction volume decreases (Piccolo et al. 2008a; Hazelton and Grossman 2009). When accurate representations of these relationships are needed for specific applications, they may be measured directly in the laboratory (Grossman et al. 2002; Piccolo et al. 2008b). This empirical approach complements theoretical attempts to predict and understand drift feeding more generally using mechanistic models.
In one mechanistic model on which several others have been based, Hughes and Dill (1990) reproduced the relationship between velocity and reaction distance using three restrictive geometric assumptions. Although these assumptions were recognized as unrealistic from the beginning, they were used for lack of plausible alternatives. The model assumed that fish 1) detect prey as soon as it enters their reaction volume, 2) move to intercept it at their maximum sustainable swimming speed, and 3) cannot intercept it if the water velocity is high enough to carry it downstream from their focal point before they can reach it at that speed. Our results corroborated others (e.g., Hughes et al. 2003) in falsifying all three assumptions. Drift-feeding fish 1) detected prey at many distances and not just on the surface of a reaction volume (Fig. 2c), 2) intercepted prey at varied speeds (Fig. 2f), and 3) usually captured prey downstream of the point from which they reacted to it (Fig. 2b). The consistent failure of the above model’s assumptions to match empirical data suggests they do not approximate the correct mechanism and a complete replacement is warranted.
A preliminary replacement model developed by N. Hughes and R. Dukas (unpublished manuscript), summarized by Dukas (2002), used a limit on spatial attention to explain the narrowing of reaction volumes with increased velocity in a manner consistent with several observations that contradicted the previous model. It also explained reduced detection probabilities with increased velocity, and the narrowing of reaction volumes with increased debris density observed in Arctic grayling by O'Brien and Showalter (1993). In their model, discriminating prey from debris was the most difficult (and therefore limiting) part of the visual search for prey. This is consistent with the “set size effect” observed in visual searches by humans and other animals, in which the time required to detect an inconspicuous target among distractors increases linearly with the number of distractors (Wolfe 1998; Nakayama and Martini 2011).
Our observations of frequent reactions to debris show that the ideas Hughes and Dukas explored remain promising, and their work showed that understanding the effects of debris could be critical for understanding the mechanisms underlying drift-feeding behavior. Some of this understanding may already exist from the study of analogous problems using signal detection theory (Wickens 2001), which describes the tradeoffs in searching for a signal amidst noise (e.g., prey amidst debris) and has proven useful for studying foraging on cryptic (Staddon and Gendron 1983), mimetic (Speed and Ruxton 2010), and masquerading prey (Skelhorn et al. 2010).
Drift-feeding fish as signal detectors
Signal detection theory is easily adapted to describe the tradeoffs in prey discrimination for drift-feeding fish (Grubb 2003). If some prey are visually indiscriminable from some debris as perceived by fish, then fish cannot detect all prey while rejecting all debris. They can accept all items of both types, or none of either, but any intermediate strategy involves pursuing the most prey-like debris (false positives), overlooking the most debris-like prey (missed detections), or both.
The discriminability of prey from debris depends on 1) the mean difference in appearance between them, 2) variability in visual characteristics among items within each type, 3) variability in how fish perceive each individual item as it drifts and tumbles through a complex visual field, and 4) the attributes of fish as signal receivers, including both their innate characteristics (e.g., sensory acuity and memory of prey appearance) and their behavioral allocation of time and attention. Fish might improve discriminability by devoting more visual attention to foraging instead of monitoring potential predators or competitors. To reduce perceptual uncertainty, fish might spend more time visually fixating on each item before pursuit, perhaps even foraging in slower current to allow longer fixations. Fish might also improve discriminability for certain types of prey, at the expense of others, by tuning their attention systems to respond more strongly to specific visual characteristics (“feature-based attention”; Carrasco 2011). When discrimination is difficult, individual fish might profitably focus feature-based attention on a single prey type of desirable abundance, energetic value, or conspicuousness, i.e., form a search image (Dukas and Kamil 2001).
Regardless of their behavioral strategies for influencing discriminability, fish must also choose how discriminating to actually be—a threshold level of some visual characteristic (or an analogous boundary for multiple characteristics) above which items are considered prey-like enough to pursue, and below which they are not. The choice of a discrimination threshold reflects a tradeoff between the costs of mistakenly pursuing debris and the costs of failing to detect real prey.
The resolution of signal detection tradeoffs by juvenile Chinook salmon in this study involved numerous false positives and much time spent pursuing debris. However, we qualitatively observed much more debris than the fish actually pursued, so they were not completely undiscriminating. Some studies of larger salmonids observed the opposite strategy—discriminating to the point that some individuals ate only a single type of prey when many others were available (Allen 1941; Bryan and Larkin 1972; Bisson 1978; Ringler 1979; Ringler 1985). Learning why drift-feeding fish resolve discrimination tradeoffs in very different ways might help uncover the mechanisms behind the wide variation in individual diets, prey detection abilities, and other behaviors of drift-feeding fish. Abbott and Sherratt (2013) created a general model applying signal detection theory to speed-accuracy and attention allocation tradeoffs, including many of those described above, and their work would be a useful starting point for modeling specific to drift-feeding fish.
Implications for foraging experiments
Experimenters studying drift-feeding behavior should be aware of the potentially integral role of debris in the mechanisms governing the prey detection, energy budgets, and optimal foraging behavior of drift-feeding fish. Experimental tanks with unnaturally debris-free water might lack a factor central to the mechanisms that produce the behaviors of interest in the wild. Only O'Brien and Showalter (1993) have added natural debris to tanks for foraging experiments (as a treatment variable, with multiple significant effects). Our observation of strong debris effects under clear, low-flow conditions suggests that some baseline level of debris might actually be the natural “control” state to reproduce in experiments involving processes affected by debris. However, as noted above, adding realistic debris would require more cautious interpretations of foraging attempts as indicators of foraging success.
Conclusions
Drift-feeding juvenile Chinook salmon in the wild spent most of their foraging time and attempts pursuing and sampling debris items they did not ingest. The proportion of failed subsurface foraging attempts greatly exceeded that observed in previous studies of still-water brook trout; this is consistent with the greater challenge of identifying drifting targets quickly. For some fish, especially in fast water, drift feeding was an almost continuous process of investigating and sampling debris in search of prey. This has direct theoretical implications as a previously overlooked part of a drift-feeding fish’s time and energy budgets. It also provides reasons to rethink drift feeding as a process in which energy intake and optimal behavior are controlled not only by physical limitations, but also by cognitive limitations on the use of visual attention for the signal detection task of discriminating prey from debris.
References
Abbott KR, Sherratt TN (2013) Optimal sampling and signal detection: unifying models of attention and speed-accuracy trade-offs. Behav Ecol 24:605–616. doi:10.1093/beheco/art001
Allen KR (1941) Studies on the biology of the early stages of the salmon (Salmo salar). J Anim Ecol 9:47–76
Bachman RA (1984) Foraging behavior of free-ranging wild and hatchery brown trout in a stream. Trans Am Fish Soc 113:1–32
Benson ER, Wipfli MS, Clapcott JE, Hughes NF (2013) Relationships between ecosystem metabolism, benthic macroinvertebrate densities, and environmental variables in a sub-arctic Alaskan river. Hydrobiologia 701:189–207. doi:10.1007/s10750-012-1272-0
Biro PA, Ridgway MS, McLaughlin RL (1996) Does the rate of foraging attempts predict ingestion rate for young-of-the-year brook trout (Salvelinus fontinalis) in the field? Can J Fish Aquat Sci 53:1814–1820
Bisson PA (1978) Diel food selection by two sizes of rainbow trout (Salmo gairdneri) in an experimental stream. Journal of the Fisheries Board of Canada 35:971–975
Bryan JE, Larkin PA (1972) Food specialization by individual trout. J Fish Res Board Can 29:1615–1624
Carrasco M (2011) Visual attention: the past 25 years. Vision Res 51:1484–1525. doi:10.1016/j.visres.2011.04.012
Dukas R (2002) Behavioural and ecological consequences of limited attention. Philos Trans R Soc Lond B Biol Sci 357:1539–1547. doi:10.1098/rstb.2002.1063
Dukas R, Kamil AC (2001) Limited attention: the constraint underlying search image. Behav Ecol 12:192–199
Dunbrack RL (1992) Sub-surface drift feeding by coho salmon (Oncorhynchus kisutch, Walbaum): a model and test. J Fish Biol 40:455–464
Elliott JM, Hurley MA (1999) A new energetics model for brown trout, Salmo trutta. Freshw Biol 42:235–246
Fausch KD (1984) Profitable stream positions for salmonids: relating specific growth rate to net energy gain. Can J Zool 62:441–451
Gowan C, Fausch KD (2002) Why do foraging stream salmonids move during summer? Environ Biol Fish 64:139–153
Grant JWA, Noakes DLG (1986) A test of a size-selective predation model with juvenile brook charr, Salvelinus fontinalis. J Fish Biol 29:15–23
Grossman GD, Rincón PA, Farr MD, Ratajczak REJ (2002) A new optimal foraging model predicts habitat use by drift-feeding stream minnows. Ecol Freshw Fish 11:2–10
Grubb TCJ (2003) The mind of the trout: a cognitive ecology for biologists and anglers. University of Wisconsin Press, Madison
Guensch GR, Hardy TB, Addley RC (2001) Examining feeding strategies and position choice of drift-feeding salmonids using an individual-based, mechanistic foraging model. Can J Fish Aquat Sci 58:446–457
Gutierrez L (2011) Terrestrial invertebrate prey for juvenile Chinook salmon: abundance and environmental controls in an interior Alaskan river. M.S. Thesis, University of Alaska Fairbanks
Harvey BC, Railsback SF (2007) Estimating multi-factor cumulative watershed effects on fish populations with an individual-based model. Fisheries 32:292–296
Hayes JW, Stark JD, Shearer KA (2000) Development and test of a whole-lifetime foraging and bioenergetics growth model for drift-feeding brown trout. Trans Am Fish Soc 129:315–332
Hayes JW, Hughes NF, Kelly LH (2007) Process-based modelling of invertebrate drift transport, net energy intake and reach carrying capacity for drift-feeding salmonids. Ecol Model 207:171–188
Hazelton PD, Grossman GD (2009) The effects of turbidity and an invasive species on foraging success of rosyside dace (Clinostomus funduloides). Freshw Biol 54:1977–1989. doi:10.1111/fwb.2009.54.issue-9
Hill J, Grossman GD (1993) An energetic model of microhabitat use for rainbow trout and rosyside dace. Ecology 74:685–698
Hollander M, Wolfe DA (1999) Nonparametric statistical methods. John Wiley & Sons, Inc, USA
Holling CS (1959) Some characteristics of simple types of predation and parasitism. Can Entomol 91:385–398
Hughes NF, Dill LM (1990) Position choice by drift-feeding salmonids - model and test for arctic grayling (Thymallus arcticus) in sub-arctic mountain streams, interior Alaska. Can J Fish Aquat Sci 47:2039–2048
Hughes NF, Kelly LH (1996) A hydrodynamic model for estimating the energetic cost of swimming maneuvers from a description of their geometry and dynamics. Can J Fish Aquat Sci 53:2484–2493
Hughes NF, Hayes JW, Shearer KA, Young RG (2003) Testing a model of drift-feeding using three-dimensional videography of wild brown trout, Salmo trutta, in a New Zealand river. Can J Fish Aquat Sci 60:1462–1476
Irvine JR, Northcote TG (1982) Significance of sequential feeding patterns of juvenile rainbow trout in a large lake-fed river. Trans Am Fish Soc 111:446–452
Jenkins TM Jr (1969) Social structure, position choice, and micridistribution of two trout Species (Salmo trutta and Salmo gairdneri) resident in mountain streams. Anim Behav Monogr 2:57–123
Jenkins AR, Keeley ER (2010) Bioenergetic assessment of habitat quality for stream-dwelling cutthroat trout (Oncorhynchus clarkii bouvieri) with implications for climate change and nutrient supplementation. Can J Fish Aquat Sci 67:371–385. doi:10.1139/F09-193
Kiflawi M, Genin A (1997) Prey flux manipulation and the feeding rates of reef-dwelling planktivorous fish. Ecology 78:1062–1077
Kutner MH, Nachtsheim CJ, Neter J, Li W (2005) Applied Linear Statistical Models, 5th edn. McGraw-Hill/Irwin, New York
McLaughlin RL, Grant JWA, Noakes DLG (2000) Living with failure: the prey capture success of young brook charr in streams. Ecol Freshw Fish 9:81–89
McNicol RE, Scherer E, Murkin EJ (1985) Quantitative field investigations of feeding and territorial behavior of young-of-the-year brook charr, Salvelinus fontinalis. Environ Biol Fish 12:219–229
Metcalfe NB, Huntingford FA, Thorpe JE (1987) Predation risk impairs diet selection in juvenile salmon. Anim Behav 35:931–933
Nakayama K, Martini P (2011) Situating visual search. Vision Res 51:1526–1537. doi:10.1016/j.visres.2010.09.003
Nislow KH, Folt CL, Parrish DL (2000) Spatially explicit bioenergetic analysis of habitat quality for age-0 Atlantic salmon. Trans Am Fish Soc 129:1067–1081
O'Brien WJ, Showalter JJ (1993) Effects of current velocity and suspended debris on the drift feeding of Arctic grayling. Trans Am Fish Soc 122:609–615
Palmer J (1995) Attention in visual search: distinguishing four causes of a set-size effect. Curr Dir Psychol Sci 4:118–123
Piccolo JJ, Hughes NF, Bryant MD (2008a) Water velocity influences prey detection and capture by drift-feeding juvenile coho salmon (Oncorhychus kisutch) and steelhead (Oncorhynchus mykiss irideus). Can J Fish Aquat Sci 65:266–275
Piccolo JJ, Hughes NF, Bryant MD (2008b) Development of net energy intake models for drift-feeding juvenile coho salmon and steelhead. Environ Biol Fish 83:259–267
Ringler NH (1979) Selective predation by drift-feeding brown trout (Salmo trutta). J Fish Res Board Can 36:392–403
Ringler NH (1985) Individual and temporal variation in prey switching by brown trout, Salmo trutta. Copeia 1985:918–926
Skelhorn J, Rowland HM, Speed MP, De Wert L, Quinn L, Delf J, Ruxton GD (2010) Size-dependent misclassification of masquerading prey. Behav Ecol 21:1344–1348. doi:10.1093/beheco/arq159
Speed MP, Ruxton GD (2010) Imperfect Batesian mimicry and the conspicuousness costs of mimetic resemblance. Am Nat 176:E1–14. doi:10.1086/652990
Staddon JER, Gendron RP (1983) Optimal detection of cryptic prey may lead to predator switching. Am Nat 843-848
Van Winkle W, Jager HI, Railsback SF, Holcomb BD, Studley TK, Balridge JE (1998) Individual-based model of sympatric populations of brown, and rainbow trout for instream flow assessment: model description, and calibration. Ecol Model 110:175–207
Webster JR, Benfield EF, Ehrman TP, Schaeffer MA, Tank JL, Hutchens JJ, D'Angelo DJ (1999) What happens to allochthonous material that falls into streams? A synthesis of new and published information from Coweeta. Freshw Biol 41:687–705
Wickens TD 2001. Elementary signal detection theory. Oxford University Press.
Wolfe JM (1998) What can 1 million trials tell us about visual search? Psychol Sci 9:33–39
Acknowledgments
This work was supported by the Arctic-Yukon-Kuskokwim Sustainable Salmon Initiative, the Institute of Arctic Biology, Alaska EPSCoR NSF award #OIA-1208927 and the state of Alaska, and the Department of Biology and College of Natural Sciences and Mathematics at the University of Alaska Fairbanks. David Neuswanger, Milo Adkison, and three anonymous reviewers helpfully critiqued this manuscript. This work was conducted under IACUC protocols #134754-1 and #175627-1. Any use of trade, product, or firm names in this publication is for descriptive purposes only and does not imply endorsement by the U.S. Government.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Neuswanger, J., Wipfli, M.S., Rosenberger, A.E. et al. Mechanisms of drift-feeding behavior in juvenile Chinook salmon and the role of inedible debris in a clear-water Alaskan stream. Environ Biol Fish 97, 489–503 (2014). https://doi.org/10.1007/s10641-014-0227-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10641-014-0227-x