Abstract
In this study we developed a simple quantitative method to assist in the decision making process of the landscape planning by integrating information of species occurrence and their individual IUCN extinction risks. We applied this method in Catalonia (north-east Iberian Peninsula) using bird atlas data to create an Index of Cumulative Threat Status (ICUTS). We employed a heuristic approach derived from qualitative scores provided by 10 experts on the avifauna of the region to choose the final index among a group of candidates. This index was used to generate two maps of conservation value at 10 × 10 km resolution, one comprising all breeding bird species in the study region (219 species), and a second one with only those bird species for which fine-grained maps (500 × 500 m) were also available (182 species). In spite of the difference in the number of species included in the two 10 × 10 km maps, we found similar geographical patterns and therefore we considered that the pattern shown by the second group of species (at 500 × 500 m resolution) represented a good proxy of the whole breeding avifauna for landscape planning purposes. The approach developed in this study may be particularly helpful in landscape planning outside protected areas because of its spatial continuity, fine-grained resolution and easy interpretation.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Human activity is often in conflict with biodiversity conservation. One of the main goals of conservation planning is to decide where biodiversity preservation should be prioritary, and in which cases it should be balanced with other human activities (Hunter and Gibbs 2007). Conservation planners have implemented several techniques that, along with biological patterns and processes, incorporate economical, ethical, and other sociopolitical constraints to identify reserve networks for the representation and persistence of biodiversity (Sarkar et al. 2006). These methodologies are usually based on the selection of areas for target species that take into account the principle of complementarity, so that sites are prioritised according to their overall contribution to the main goal (Margules and Pressey 2000). Although protected areas often represent the cornerstone of nature conservation, key biodiversity components and ecological processes also occur outside them (Rodrigues et al. 1999; Margules and Pressey 2000; Araujo et al. 2007). In consequence, conservation planning that is exclusively based on the identification of specific sites has some limitations regarding off-reserve planning and management, and it is of increasing importance to develop methods that allow to quantify and represent how the conservation value varies across a whole region (Margules and Pressey 2000).
On the other hand, it is commonly thought that not all species hold the same importance for conservation planning, either for reserve selection, development constraint or resource exploitation, and that threatened species deserve special attention in the decision making process (Ceballos et al. 1998; Noss 2000). However, there is no biological justification for using threatened species alone as an umbrella group for all biodiversity, and the remaining species should contribute somehow to provide relevant information (Possingham et al. 2002). Thus, Root et al. (2003) used mostly but not exclusively endangered vertebrates in the development of their fine-grained conservation maps for California, whereas Rey Benayas and de la Montaña (2003) used data for all vertebrates in Spain, although at a very coarse resolution (50 × 50 km). These approaches generated indices that summarised information per cell but none dealt with the (probably inevitable) subjective nature of species categorisation and their integration into a single index.
Assessing the continuous variation of conservation value across a given area requires the availability of reliable maps of species distributions at a resolution grain high enough so that it can be useful for conservation planning (Margules and Pressey 2000; Ferrier 2002; Wilson et al. 2005; Johnson and Gillingham 2005). This type of information is usually scarce for many taxa; therefore, it is inevitable to use surrogates of indicators of biodiversity, such as sub-sets of species, species assemblages or habitat types, to achieve this purpose (Margules and Pressey 2000). Obviously, selecting these surrogates is not a trivial question and it strongly depends on the quality of the available data (van Jaarsveld et al. 1998). Birds are among the groups most widely monitored at large spatial scales, and the information about their distribution is often much more precise than on many other taxa, specially in fine-grained bird atlases (Gibbons et al. 2007). As a result, the use of high resolution bird atlas data is beginning to provide much help in the designation of areas of major conservation concern (Brown et al. 1995; Brotons et al. 2003). However, to our knowledge, there are no studies that have dealt with the possible biases in the designation of such areas due to the lack of reliable maps for some scarce but otherwise often threatened species.
In this paper, we attempt to produce a simple quantitative method that considers not only threatened species but all the species present in a particular region. We developed an expert-based formula that weights the importance of the presence of every species by its regional risk of extinction and assesses the variation in the conservation value across this region. We applied this procedure to bird atlas data and analysed the effects of the lack of suitable fine-grained maps for some scarce species for which only coarse resolution maps are available. Our method is addressed to assist in the decision making process of whole landscape planning by allowing direct quantitative comparisons of the conservation value of different sites rather than to aid in the designation of protected areas.
In addition, this work has not been exclusively developed as an academic exercise but as a request from governmental land managers in Catalonia (NE Spain) for the planning of non-protected areas potentially affected by urban and infrastructure projects (see http://www.diba.es/parcsn/parcs/plana.asp?parc=18&m=237).
Methods
Study area and data source
We used the data base of the Catalan Breeding Bird Atlas 1999–2002 (Estrada et al. 2004) for this study. Catalonia is a region of about 32,000 km2 located in the north-east corner of the Iberian Peninsula that is characterised by high habitat diversity, from coastal marshes to alpine meadows and from deciduous forests to steppes. Field atlas data were gathered during the period 1999–2002. All of the 385 10 × 10 km UTM squares of the region were sampled. In each of these 10 × 10 km squares two sampling strategies were conducted: (1) extensive surveys of the whole square (mean 66 h, SD 44 h), and (2) two surveys of 1 h in a stratified subset of 10 1 × 1 km squares, (thus giving a total of 3,077 1 × 1 km for the entire study region). We consider that the majority of the members of each bird community were recorded in these surveys, including threatened species. In both field surveys only presence data were recorded.
The Catalan Breeding Bird Atlas 1999–2002 provided 10 × 10 km presence/absence maps for all breeding species (219 species, excluding exotics and recent colonizers), and fine-grained maps of relative abundance (actually probability of occurrence, ranging from 0 to 1) for the 182 species for which a niche-based modelling process provided accurate enough results to generate continuous maps at such resolution (Estrada et al. 2004; Brotons et al. 2007) (Appendix 1). Although the resolution of the field bird survey was carried out at 1 × 1 km, all these fine-grained maps were scaled to a 500 × 500 m resolution after a process of reclassification and assignation of the mean values of their adjacent neighbours to each of these cells (Estrada et al. 2004).
Ranking bird species extinction risk
In order to determine the threat status of the species that breed in Catalonia, the Catalan Breeding Bird Atlas 1999–2002 followed the World Conservation Union criteria (IUCN 2001) as well as regional correctors (IUCN 2003). According to these criteria, 29% of the 232 bird species that bred in the region had some category of threat (Appendix 1). Following the quantitative procedures applied by Rey Benayas and de la Montaña (2003) and Root et al. (2003) we assigned a numerical value of threat status (TS) to each category of threat: Critically Endangered (=5), Endangered (=4), Vulnerable (=3), Near Threatened (=2) and Least Concern (=1). We applied a conservative criterion and considered that the category Data Deficient equated the extinction risk of the Near Threatened category (=2). According to the IUCN criteria, exotics and recent colonizers (13 species in our study) were not evaluated; consequently, these species were not incorporated in the assessment of the conservation value of the squares. On the other hand, we did not include indices of rarity in our evaluation since preliminary analyses showed that rarity was significantly correlated to threat status (r = 0.70, see Rey Benayas and de la Montaña 2003 for similar results).
Ranking squares by their bird species extinction risk
We defined the Index of Cumulative Threat Status (hereafter ICUTS) as an estimate of the conservation value of the whole bird community of a given square. This index ranks every square of the study area as a function of the extinction risk of all the species that occur within it. Therefore, finding an appropriate formula to sum up all the available information into a single value is crucial. To achieve this, there needs to be devised a suitable way of comparing species with different numerical threat status (TS).
The increment of the number of species between categories of threat suggested a power equation (Fig. 1). Therefore, we built a power equation to rank bird communities according to their threat status. A first order equation would mask the importance of a few threatened species because they would be outnumbered by the non-threatened species (Fig. 1). In order to calibrate the relevance of a given species with its threat status, we developed a series of formulae based on the sum of TS to the nth power, where n = 1, 2, 3, 4, 5, 6, 7. Conceptually, these 7 formulae differ in the number of species of a given category that equates to one species of the next upper category. The, seven possible ICUTS were assessed as: \( {\text{ICUTS}}_{j} = \sum \limits_{i = 1}^{i = m} {{\text{TS}}_{i}^{n} } , \)where TS is the numerical threat status of the i species in the j square.

Mean number of species by IUCN conservation category (LC least concern, NT near threatened, DD data deficient, VU vulnerable, EN endangered, CR critically endangered) in the 1 × 1 km UTM squares of Catalonia. Applying a conservative criterion, we considered that the category data deficient equates to near threatened (see main text). Bars indicate standard deviation
We calculated the values given by these 7 formulae in 8 1 × 1 km squares that were selected to maximise the gradient in the number of threatened species. Then, we evaluated the performance of these 7 formulae by comparing their results with the ranking provided by a panel of 10 experts on the Catalan avifauna. The use of a panel of experts is a common technique considered to provide optimal diagnoses against which the outputs from decision support systems can be compared (O’Keeffe et al. 1987; Sojda 2007). The experts were selected because they met two conditions: possession of global knowledge on the Catalan birds, and current involvement in bird conservation in the study region, which ranges from academic studies to wildlife management. Specifically, they were given the list of species and their IUCN threat status for each of the 8 1 × 1 km square, and they were asked to rank them according to the conservation value of the birds. It could be argued that 8 squares could be few but it would not have been easy to rank qualitatively a higher number of squares regarding its species composition.
Finally, we evaluated the influence of the number of species of each category of threat (critically endangered (CR), endangered (EN), vulnerable (VU), near threatened (NT), data deficient (DD) and least concern (LC)) on the 7 possible ICUTS to determine which of these categories are actually determining the variation of each ICUTS. To do that, we used the 3,077 1 × 1 km squares surveyed in the Atlas to generate 5 different General Linear Models for each possible ICUTS. In all these models the dependent variable was the ICUTS and the number of predictors additively increased as follows: model (1) number of CR species; model (2) number of CR + EN species; model (3) number of CR + EN + VU species; model (4) number of CR + EN + VU + DD + NT species; and model (5) number of CR + EN + VU + DD + NT + LC species. The variance explained by these models indicated the relative importance of each of these categories of threat in each ICUTS formula.
Mapping conservation value for birds
Once the appropriate ICUTS formula was chosen, conservation values were calculated for all the squares (both at 10 × 10 km and at 500 × 500 m) of Catalonia for mapping purposes. We generated maps of conservation value which differed in cell size: two 10 × 10 km maps and one 500 × 500 m map. In the latter case, we transformed the probability of occurrence for each species (ranging from 0 to 1) originally shown into presence (1)—absence (0) by applying the threshold probability or cut-off point. These points were determined by means of the receiver operating characteristic (ROC) graphs (Pearce and Ferrier 2000).
In order to explore possible biases in the high resolution map of conservation value caused by the exclusion of the scarce species (often threatened, see Appendix 1) for which maps at such resolution were not available, we generated two 10 × 10 km maps of conservation value. The first map was created using all breeding species with the exception of exotic species and recent colonizers (219 species). The second map was created using the subset of 182 species for which 500 × 500 m resolution maps were available. Then, we used the ICUTS values obtained in these two 10 × 10 km maps to perform a General Linear Model with the ICUTS calculated with 219 species as dependent variable and the ICUTS calculated with 182 species as predictor.
Results
We obtained 7 different ICUTS for each of the 8 1 × 1 km squares (one for each of the following powers n = 1, 2, 3, 4, 5, 6, 7). Then, we compared these 7 values with the square rankings given by the panel of 10 experts. We found that these 10 rankings fully coincided with those of ICUTS to the fourth and to the fifth power (Fig. 2). From a conservational perspective, and considering that the importance of threatened species increases with the power applied, we selected n = 5 as the best choice to produce these maps of conservation value.

Results of the evaluation carried out by 10 experts who were asked to rank the conservation value of 8 1 × 1 km UTM squares (SQ1–SQ8) taking into account the list of species occurring in those squares and their IUCN extinction risk values. Ranks assessed using the formulae with different powers, n = 1, 2, 3, 4, 5, 6 and 7 are shown below. The formulae for n = 4 and n = 5 yielded the same ranking as that of the experts
The relative importance of high extinction risk indices increased with the power (Table 1). In the selected power (n = 5) the variance explained by the threatened species (CR, EN and VU) was 99%, thus indicating that this group of species actually controlled the variance of the conservation index in the overall data matrix. Nevertheless, 36% of the 3,077 1 × 1 UTM squares surveyed in the atlas have no threatened species; for all these squares the ICUTS formulae produced a gradient of conservation value based on the presence of non-threatened categories (DD, NT and LC).
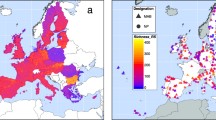
Thus, we obtained the ICUTS at two resolutions (500 × 500 m and 10 × 10 km squares) by applying the ICUTS formula to the fifth power to different data sets. Then, we proceeded to plot these values on the maps of the study area. The two 10 × 10 km resolution maps showed clear geographical gradients for the values of ICUTS (Fig. 3). The map produced from 182 species was a good predictor of the map containing all the species (F1,383 = 1,936; P < 0.00001; r2 = 0.83), and only nine squares showed discrepancy in the ICUTS value > 60%. These results indicate that even considering exclusively the 182 breeding species with 500 × 500 m resolution maps of distribution available, the ICUTS map was representative of the overall breeding avifauna. The 500 × 500 m resolution ICUTS map (Fig. 4) showed how the areas of major conservation values in Catalonia were concentrated in: (1) coastal wetlands (Ebro delta, Llobregat delta and Aiguamolls de l’Empordà; south, central and north coastal wetlands of Catalonia, respectively), (2) steppes of the Lleida plain (central-west Catalonia) and (3) the Pyrenees mountain range (north Catalonia). Secondarily, farmlands and shrublands showed intermediate conservation values.

Maps of conservation value in Catalonia provided by the ICUTS at 10 × 10 km resolution. The map on the left includes the threat status of all breeding species (total 219 species), whereas the map on the right includes exclusively the set of species for which the 500 × 500 m maps were generated in the Catalan Breeding Bird Atlas (total 182 species)

Map of conservation value ICUTS of Catalonia at 500 × 500 m resolution, generated from 182 species (see methodology for calculation details)
Discussion
In this study, we have developed a methodology to generate quantitative maps of conservation value over large geographical areas for which species threat status and fine grain distribution maps are available. The formula used to generate the conservation value took into account all the species present in an area and the gradual importance of each species according to its extinction risk. We have collated several variants of our index with the rankings of conservation value provided by a panel of 10 experts of the avifauna of the study region. As usual in conservation planning techniques, this approach is inevitably subjective to some extent; however, we think that the “fine tuning” of the index with a team of independent experts allows a more robust ICUTS than the one that would have been produced by one or a few experts. We think that the selection of power = 5 as the most adjusted to expert’s evaluation could be extrapolated to areas of similar avifauna composition. Thus, although further research would be advisable, this species rank would probably produce similar results in other European scenarios. However, in case this method was applied to other biogeographical regions, the expert evaluation should certainly be conducted again.
Interestingly, we found that the data matrix variance of the index selected by the panel of experts was explained by the number of threatened species (r2 = 0.99), which might suggest that the index itself represents a complication of the simple pattern produced by just the number of threatened species. This is only partially true since a third of the surveyed squares have no threatened species and for all of them the ICUTS formulae gave a variation of conservation value based on the presence of non-threatened categories (DD, NT and LC). We consider that this is particularly important and that is the most interesting result of this index: producing maps of conservation value across an entire region and not only in the areas where threatened species occur.
We generated two maps of conservation value at 10 × 10 km resolution, one with all breeding species and a second exclusively with species for which 500 × 500 m distribution maps were available (this map comprised 83% of all breeding species). Both maps show essentially the same geographical patterns despite the differences in the number of species included. The high correlation between the two 10 × 10 km resolution maps (r2 = 0.83) indicates that the lack of a few species does not greatly affect the results of the conservation value, even though many of these absences (26 of 37 species) correspond to threatened species. This high correlation could be explained by the fact that there is a coincidence in the areas where the threatened species usually occur, mainly steppes, wetlands and high mountains (Fig. 4). Therefore, this result suggests that, in spite of the absence of high resolution maps for all bird species, the map of conservation value generated at such high resolution may provide robust spatial patterns for the overall bird community. Grain-size is a key aspect when applied to conservation planning and, therefore, when possible, we strongly encourage the use of high resolution maps.
High resolution maps over large areas are usually produced by means of field surveys in a number of sample units, plus subsequent modelling to predict species distribution in non-surveyed zones. Although some caution is required in relation to the specific analytical approach used to obtain maps of extinction risk assessment (Thuiller et al. 2004) or conservation planning (Wilson et al. 2005), modelling is probably the only feasible way to obtain such maps for large areas, since survey capacity is always limited. In consequence, bird atlases are increasingly using such an analytical approach (Gibbons et al. 2007). Nevertheless, the classic atlases are not the only way to obtain such high resolution maps, and modelling could also be successfully applied to data from several other types of surveys (Thogmartin et al. 2004; Carrascal et al. 2006; Brotons et al. 2007). The application of such techniques to data from long-term monitoring programs could be very interesting. These would enhance the capacity to map species distributions in many countries and regions that do not have updated atlases but in which monitoring schemes are currently in progress (Brotons et al. 2007). Finally, modelling techniques could prove to be essential in countries for which field data are scarce due to an insufficient number of observers or to poor communications (Rodriguez et al. 2007).
Our focus on breeding birds is probably a biased perspective over the whole biodiversity (Prendergast et al. 1993) and, although they are often considered reliable bioindicators for the entire ecosystem (e.g. Gregory et al. 2005), wider quantitative approaches should be promoted in order to create a more robust basis for conservation planning. Therefore, we strongly encourage applying this type of approach to other taxonomic groups in order to generate maps of conservation value that are well balanced across the biodiversity spectrum.
It could be also argued that the IUCN threat status is not the only element to be taken into account for defining the conservation value of a given area and even that this categorisation was not primarily designed for this purpose and consequently may show a poor performance if it is not combined with additional criteria (Possingham et al. 2002). Thus, the incorporation into these conservation indices of information about ecological integrity, which focuses on the appropriate functioning of ecological processes (Parrish et al. 2003), deserve further research.
Applying conservation maps
The map of conservation value developed in this study has already been used in landscape planning in Catalonia, where previous comparable studies provided information of a very coarse resolution (e.g. 50 × 50 km, see Rey Benayas and de la Montaña 2003). In particular, it stands as an essential component of the SITxell (Territorial Information System of the provincial council of Barcelona, http://www.diba.es/parcsn/parcs/plana.asp?parc=18&m=237), a multidisciplinary project aimed at the incorporation of natural and social criteria in landscape planning. From a municipality level to a regional level, our map of conservation value has already been used in Catalonia as a versatile tool to make decisions regarding infrastructure and urban development or location of new areas of conservation value. Furthermore, this map is starting to receive attention from technicians working in ecological impact assessment, for which the continuous, fine-grained resolution and easy interpretation of such approach could be a valuable new source of information. The use of this unique map for such different objectives may be subjected to some criticism from an academic perspective but often landscape planners need a limited number of tools to communicate and convince social audiences of the importance of their decisions. This is precisely what makes a non-targeted approach for individual species like this useful, since targets, which invariably depend on changing socio-economical situations, greatly varies both spatially and temporally.
Finally, we would like to stress the limitations of applying such a static conservation maps in a global changing scenario. Bird distributions will undoubtedly vary in response to climate change and land use changes. In consequence, it is very important to update the information on bird distribution by means of new atlases or other bird monitoring surveys (Brotons et al. 2007).
References
Araujo MB, Lobo JM, Moreno JC (2007) The effectiveness of Iberian protected areas in conserving terrestrial biodiversity. Conserv Biol 21:1423–1432
Brotons L, Mañosa S, Estrada J (2003) Modelling the effects of irrigation schemes on the distribution of steppe birds in Mediterranean farmland. Biodivers Conserv 13:1039–1058
Brotons L, Herrando S, Pla M (2007) Updating bird species distribution at large spatial scales: applications of habitat modelling to data from long term monitoring programs. Biodivers Distrib 13:276–288
Brown AF, Stillman RA, Gibbons DW (1995) Use of breeding bird atlas data to identify important bird areas: a northern England case study. Bird Study 42:132–143
Carrascal LM, Seoane J, Palomino D, Alonso CL, Lobo JM (2006) Species-specific features affect the ability of census derived models to map avian distribution. Ecol Res 21(5):681–691
Ceballos G, Rodríguez P, Medellín RA (1998) Assessing conservation priorities in megadiverse Mexico: mammalian diversity, endemicity, and endangerment. Ecol Appl 8:8–17
Estrada J, Pedrocchi V, Brotons L, Herrando S (eds) (2004) Atles dels ocells nidificants de Catalunya 1999–2002. Institut Català d’Ornitologia/Lynx edicions, Barcelona
Ferrier S (2002) Mapping spatial pattern in biodiversity for regional conservation planning: where to from here? Syst Biol 51:331–363
Gibbons DW, Donald PF, Bauer HG, Fornasari L, Dawson IK (2007) Mapping avian distributions: the evolution of bird atlases. Bird Study 54:324–334
Gregory RD, van Strien A, Vorisek P, Meyling AWG, Noble DG, Foppen RPB, Gibbons DW (2005) Developing indicators for European birds. Phil Trans R Soc B-Biol Sci 360:269–288
Hunter ML, Gibbs JP (2007) Fundamentals of conservation biology. Blackwell Publishing, Madden, MA
IUCN (2001) The IUCN red list categories and criteria: version 3.1. IUCN Species Survival Commission, IUCN, Cambridge, UK
IUCN (2003) Guidelines for applications of IUCN red list criteria at regional levels: version 3.0. IUCN Species Survival Commission, IUCN, Gland, Switzerland
Johnson CJ, Gillingham MP (2005) An evaluation of mapped species distribution models used for conservation planning. Environ Conserv 21:117–128
Margules CR, Pressey RL (2000) Systematic conservation planning. Nature 405:243–253
Noss RF (2000) High-risk ecosystems as foci for conserving biodiversity and ecological integrity in ecological risk assessments. Environ Sci Pol 3:321–332
O’Keeffe RM, Balci O, Smith EP (1987) Validating expert system performance. IExpert 2:81–90
Parrish JD, Braun DP, Unnasch RS (2003) Are we conserving what we say we are? Measuring ecological integrity within protected areas. Bioscience 53:851–860
Pearce J, Ferrier S (2000) Evaluating the predictive performance of habitat models developed using logistic regression. Ecol Model 133:225–245
Possingham HP, Andelman SJ, Burgman MA, Medelln RA, Master LL, Keith DA (2002) Limits to the use of threatened species lists. Trends Ecol Evol 17:503–507
Prendergast JR, Quinn RM, Lawton JH, Eversham BC, Gibbons DW (1993) Rare species, the coincidence of diversity hotspots and conservation strategies. Nature 365:335–337
Rey Benayas JM, de la Montaña E (2003) Identifying areas of high-value vertebrate diversity for strengthening conservation. Biol Conserv 114:357–370
Rodrigues ASL, Tratt R, Wheeler BD, Gaston KJ (1999) The performance of existing networks of conservation areas in representing biodiversity. Proc R Soc B 266:1453
Rodriguez JP, Brotons L, Bustamante J, Seoane J (2007) The application of predictive modelling of species distribution to biodiversity conservation. Divers Distrib 13:243–251
Root KV, Akcakaya HR, Ginzburg L (2003) A multispecies approach to ecological valuation and conservation. Conserv Biol 17:196–206
Sarkar S, Pressey RL, Faith DP, Margules CR, Fuller T, Stoms DM, Moffett A, Wilson KA, Williams KJ, Williams PH, Andelman S (2006) Biodiversity conservation planning tools: present status and challenges for the future. Annu Rev Environ Resour 31:123–159
Sojda RJ (2007) Empirical evaluation of decision support systems: needs, definitions, potential methods, and an example pertaining to waterfowl management. Environ Model Softw 22:277
Thogmartin WE, Sauer JR, Knutson MG (2004) A hierarchical spatial model of avian abundance with application to Cerulean Warblers. Ecol Appl 14:1766–1779
Thuiller W, Araujo MB, Pearson RG, Whittaker RJ, Brotons L, Lavorel S (2004) Uncertainty in predictions of extinction risk. Nature 430
van Jaarsveld AS, Freitag S, Chown SL, Muller C, Koch S, Hull H, Bellamy C, ger M, dy-Younga S, Mansell MW, Scholtz CH (1998) Biodiversity assessment and conservation strategies. Science 279:2106–2108
Wilson KA, Westphal MI, Possingham HP, Elith J (2005) Sensitivity of conservation planning to different approaches to using predicted species distribution data. Biol Conserv 122:99–112
Acknowledgments
The conceptual basis of this article was promoted by the Barcelona provincial council in the framework of the SITxell project. We greatly thank the support given by Carles Castell and his collaborators from the very beginning of the project. This approach would have not been possible without the efforts of our colleagues Joan Estrada and Vittorio Pedrocchi on the Catalan Breeding Bird Atlas 1999–2002. The Government of Catalonia and the private foundation Obra Social Caixa Catalunya provided financial support for this Atlas. We thank the contribution of the experts that helped to calibrate the ICUTS at its best: Pere Aymerich, Raül Aymí, Gerard Bota, Jordi Camprodon, Diego Garcia, Gabriel Gargallo, Santi Mañosa, Albert Martínez and Jaume Orta. We also thank two anonymous referees who provided interesting comments on previous drafts of the manuscript and Marc Anton for his support in the data management. Finally, we would like to express our warmest thank to the more than 500 field volunteers who collaborated in the first atlas project of the Catalan Ornithological Institute. This work was included in the project CGL2009-08798/BOS, granted by the Spanish Ministry of Science and Innovation, and was conducted by the Research Group 2009 SGR 1467, by the Catalan Government.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
See Table 2.
Rights and permissions
About this article
Cite this article
Herrando, S., Brotons, L., Guallar, S. et al. Assessing regional variation in conservation value using fine-grained bird atlases. Biodivers Conserv 19, 867–881 (2010). https://doi.org/10.1007/s10531-009-9741-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10531-009-9741-0