
Abstract
Rotan Perccottus glenii is one of the most widespread alien invasive freshwater fish in Eurasia. We reviewed the mechanisms of its dispersion, identified the potential range and regarded these results in the light of possible prevention of further expansion. Our analysis was based on 970 presence records and 198 absence records from both invaded and native parts of the range. Since 1916 invasion dynamics of rotan have been driven by episodic anthropogenic translocations, followed by spontaneous expansion within river networks, and secondary translocations. Maxent species distribution models with independent validations showed that rotan distribution in Eurasia has climatic limitations; rotan have already invaded most areas with high climatic suitability in the Palearctic, but some regions of North Eurasia and North America, where rotan is currently absent, have high climatic suitability and may be vulnerable to invasion in the future. Rotan’s high invasiveness, lack of geographical barriers and absence of reliable methods to prevent spread present a very high risk of expansion within appropriate climate limits in Europe. Our analysis shows that the long-term invasion dynamics of an invasive freshwater species may depend on climate variables rather than on river basin borders. Species distribution models, based on large scale environmental layers, can be useful to understand the invasion risk for other freshwater species restricted to shallow aquatic habitats.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The development of human civilisation, including increasing populations and globalisation is resulting in progressive homogenisation of the Earth biota within and among continents. Investigations of introduction pathways and predicting spatial patterns of biotic invasions, homogenization, hybridization, and control and eradication are necessary to understand the invasion process (Sato et al. 2010). Understanding spatial patterns of invasion and the identification of the areas most at risk of invasion are particularly important because they may be used to determine preventive measures. Such preventative measures are cheaper and more effective than those performed at later stages of invasions (Leung et al. 2002; Hulme 2006). Climatic similarity between native and target regions is considered as a key requirement for the success of invasions (Ficetola et al. 2007; van Wilgen et al. 2009; Bomford et al. 2010, Medley 2010). Therefore species distribution models (SDM), evaluating the relationships between species and climatic features, are often used to assess the potential distribution of invasive organisms and the areas where the risk of invasion is highest. However, predictions obtained through SDM may be different from the actual invaded ranges for several reasons, including biotic interactions and niche shifts (Fitzpatrick et al. 2007; Rödder et al. 2009; Medley 2010). Furthermore, SDM often represent the realized niche of the species. In principle, the fundamental niche would be more relevant to the potential distribution, but is more difficult to define (Jeschke and Strayer 2008; Jiménez-Valverde et al. 2008; Kearney and Porter 2009; Medley 2010). Therefore, before models can be used for predicting range shifts and risk assessment, model performance should be tested with independent validation data, which allows assessment of the reliability of predictions (Guisan and Thuiller 2005). However, only a limited number of studies use independent data to evaluate the predictive power of models; data on a larger number of invasive species are required to assess the reliability of SDM results for prevention and management (reviewed by Jeschke and Strayer 2008).
Many freshwater fishes have been introduced over the planet and sometimes introduced fishes become invasive. In recent years at least 536 alien fish taxa (i.e., species, hybrids, and certain unidentified forms) were recorded in inland waters of the United States (Fuller et al. 1999); similarly, at least 76 alien fish species were registered in European fresh waters (Lehtonen 2002). Environmental suitability for freshwater species clearly depends on the features of their freshwater habitats. However, for both terrestrial and freshwater species, large scale SDM are often based on environmental variables obtained through geographic information systems or remote sensing (e.g., Ficetola et al. 2007; van Wilgen et al. 2009; Bomford et al. 2010). For terrestrial environments, these variables exist at high resolution and over a large part of the globe (Sillero and Tarroso 2010). On the other hand, it is not clear to what extent these data can be used to describe inland waters, which have features that might not be captured by large scale environmental layers. Studying invasive species for which there are extensive datasets on distribution within both native and invaded parts of their range may be extremely useful to assess whether SDMs based on large-scale environmental layers can be successfully used for freshwater species (Drake and Bossenbroek 2004).
We analyzed the invasion of the rotan, Perccottus glenii Dybowski, 1877 (family Odontobutidae), known also as Amur or Chinese sleeper, which is one of the most widespread invasive fish in Eurasia (Reshetnikov 2010). Rotan is a medium-sized fish (total length up to 27 cm) that is native to the Far East region of Eurasia in Russia, north-eastern China and northern North Korea (Fig. 1). The rotan’s ability to effectively use trophic resources ranging from ciliates to vertebrates (Sinelnikov 1976; Manteifel and Reshetnikov 2001; Reshetnikov AN 2003; Koščo et al. 2008; Grabowska et al. 2009) coupled with a prolonged reproductive period, likely allows the coexistence of individuals of multiple sizes (Zaloznykh 1984). Rotan is able to escape competition and predation by inhabiting waterbodies unsuitable for most other freshwater fishes of Northern Eurasia. The above-mentioned biological characteristics are typical for highly invasive species (Puesink 2005). Moreover, rotan dramatically impacts freshwater communities by depressing species diversity (e.g., extirpating some amphibian species; Reshetnikov AN 2003).

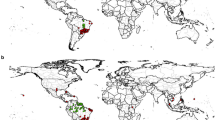
The range of the fish rotan, Perccottus glenii, in Eurasia from Reshetnikov (2010). Open circles represent presence records within the native range. Black circles represent presence records within the invaded range. In a primary rivers are shown, in b country borders are shown. Open squares represent long-distance initial introductions. See Table 1 for an explanation of the numbers
Rotan has been successfully transported by humans far outside its natural range several times during the twentieth century (Machlin 1960; Elovenko 1981; Reshetnikov 2001, 2004; Miller and Vasil’eva 2003). Reshetnikov (2010) recently presented a map of its non-native range (Fig. 1). Invasive populations of rotan are currently known in many countries of Eurasia: Russia, Mongolia, Kazakhstan, Belarus, Ukraine, Lithuania, Latvia, Estonia, Poland, Slovakia, Hungary, Serbia, Bulgaria, Romania, and Moldova. This species continues to increase its invaded range (e.g., Ćaleta et al. 2011). However, information on the vectors and pathways of rotan invasion remain limited; bioclimatic models identifying areas most at risk would be extremely useful to implement preventive management actions.
The objectives of the present work were to: (1) provide a review of the vectors, limiting factors and dynamics of the current distribution of rotan; (2) build an SDM based on large scale environmental layers, and assess whether they can be successfully used to predict the potential range expansion; and (3) discuss our results in terms of preventing further range expansion and for management of this undesirable invasive species.
Methods
Distribution data
We used published information on the distribution of rotan in Eurasia (Reshetnikov 2010). These data were gathered through an analysis of literature sources and a questionnaire survey of specialists in regions of Russia and 20 other countries. Relevant data were found in 521 publications spanning 1877–2008. The data from catalogues of Zoological Museum of Moscow State University (Moscow), the Zoological Museum of Ukrainian National Academy of Sciences and the Museum of Vladivostok were also used. In addition, 141 specialists kindly provided unpublished information about locations of non-native populations. The validity of these data was scrutinized; in doubtful cases, collected material or photos were requested. When doubt yet remained or data were insufficient, one of the authors (ANR) traveled into those regions and surveyed 81 waterbodies in the Enisey river basin in 2005, 39 waterbodies in Ob’ river basin in 2005, and 102 waterbodies in Irtysh river basin (77 in 2006 and 25 in 2008). Expedition observations are partly published (Reshetnikov and Petlina 2007; Reshetnikov 2008; Reshetnikov and Chibilev 2009).
We considered all records received before 2009 in the analyses. Ninety four presence records from the native range, within 71 grid cells in China, North Korea, and the Far-Eastern region of Russia were used. From the invaded range, we used 876 presence records within 592 grid cells in the above-mentioned fifteen countries from which invasive populations are known. In addition, previously unpublished information on rotan absence records in 198 localities within 142 grid cells was also used.
Environmental data
We used climatic variables from the CRU CL 2.0 global data set at 10 × 10 arc-minutes resolution (New et al. 2002). Our approach integrated classical correlative SDM with biological characteristics of rotan. This produces more robust models than the simple correlative approach using comprehensive sets of environmental variables (Kearney and Porter 2009; Rödder et al. 2009). We considered four climatic variables selected on the basis of species biology: (1) Maximum temperature of the warmest month (range: 2.7–40.7°C within study area) describing the thermal tolerance of the species. Southern distribution may be limited by maximum temperature because rotan does not persist at water temperatures of about 34–38°C (Golovanova et al. 2007). (2) Growing degree days above 10°C (defined as the temperature sum of all consecutive days with mean temperature greater than 10°C; range: 0–3418). This variable represents the availability of thermal energy, particularly for reproduction, and was included because the northern distribution of rotan may be limited by low summer temperature. This species requires water temperatures higher than 15°C for beginning of spawning (Kirpichnikov 1945). (3) Total precipitation during the warmest quarter (June–August within the study area; range: 0–819 mm). (4) The mean ratio of annual actual over potential evapotranspiration, representing an index of humidity (range: 0–0.96). These two last variables are related to water availability and stability of waterbodies and are key factors for the persistence of rotan populations, since they are mainly restricted to shallow, isolated or temporary isolated waterbodies (Nikolskiy 1956). We did not consider minimum temperature of the coldest month as limiting factor because rotan overwinters in relatively stable aquatic conditions and sometimes can hibernate in the ice (Sokolov 2001). We used a limited number of variables to avoid multicollinearity issues, and because the use of many climatic variables may lead to models overfitting the data and limited robustness (Nogués-Bravo 2009; Rödder et al. 2009).
Modelling
We used Maxent 3.3 (“maximum entropy”) to build the SDM (Phillips et al. 2006; Phillips and Dudík 2008; Elith et al. 2011). Maxent is a machine learning method that estimates species distribution on the basis of maximum entropy. This method evaluates the suitability of each grid cell as a function of environmental variables; it requires presence-only data, and can calculate the relative importance of different environmental features (Phillips et al. 2006; Phillips and Dudík 2008). We used linear, quadratic and hinge features and a logistic output, with suitability values ranging from 0 (unsuitable) to 1 (optimal habitat) and considered only one record per grid cell as evidence of species presence (Phillips and Dudík 2008). In recent comparisons, Maxent was among the most effective SDM methods, and showed high quality performance (Jeschke and Strayer 2008; Wisz et al. 2008). The reliability of Maxent has been confirmed by its capacity to correctly predict the dynamics of biological invasions (e.g., Ficetola et al. 2007; Rödder et al. 2009; Ficetola et al. 2010) and novel presence localities for poorly known species (Pearson et al. 2007).
We built three models: (1) the native model, calibrated using rotan records within the native range of the species; (2) the invasive model, calibrated using the records within the invaded range; (3) the all data model, calibrated using all presence records of the whole native and invaded range. Subsequently, the native model was projected into the invaded range, and the invasive model was projected into the native range to evaluate predictive performance; all three models were projected into the whole Palaearctic biogeographic realm (latitude > 34°N). We used the 10th percentile training presence as a suitability threshold, i.e., we assumed that a cell is suitable if its suitability score is greater than the 10th percentile of training presence points (Pearson et al. 2007). This threshold showed good capability of correctly predicting presence of rare species and invasion dynamics of alien species (e.g., Pearson et al. 2007; Ficetola et al. 2010; Fouquet et al. 2010). Models calibrated with records of both native and invasive populations can better describe the potential distribution of the species, and therefore can yield more robust predictions (Steiner et al. 2008). As many species from Eurasia are currently invasive in North America and vice versa (Fuller et al. 1999; Jeschke and Strayer 2005), the all data model was also projected to North America, to evaluate invasion risk in another continent.
We used cross-validation to assess the robustness of Maxent models (Nogués-Bravo 2009). For each model (i.e., native, invasive and all data models), we randomly divided the cells with presence records into five groups; we then ran the model five times, each time using a different group of cases (representing 20% of presences) as test cells and the remaining subsets as training cases. We built the model averaged across the replicates, and we used the averaged model in all analyses of suitability and to create the maps.
Extrapolating models outside the range of environmental conditions used for calibration can be problematic (Fitzpatrick and Hargrove 2009). We therefore used Maxent to calculate “clamping”, identifying areas where environmental variables are outside their calibration range, which might affect predicted suitability (Phillips et al. 2006). However, all models showed very low clamping when projected outside the calibration area (results not shown), indicating that environmental conditions were not outside of the calibration range.
Evaluation of models
We used several methods to evaluate the Maxent results. First, we used the area under the curve (AUC) of the receiver operator characteristic plot to test the agreement between observed species presence and projected distribution (Manel et al. 2001). Calculating AUC using the training data set might give high AUC values even if performance outside the training region is limited. Therefore, (1) to evaluate model robustness within the calibration region, we calculated the AUCs for the test data of the cross-validated models, by averaging the AUC of all models; and (2) to evaluate the model ability to correctly predict invasions, we calculated the AUC using the presence records outside the calibration region as independent test data. For example, we calculated the AUC evaluating the performance of the native model in predicting the records of invasive populations. Usually, AUC ranges from 0 to 1, with AUC ≤ 0.5 indicating that a model does not perform better than random, AUC > 0.8 indicating good performance and AUC ≥ 0.9 indicating very good performance. However, for SDM based on presence-only data, maximum achievable AUC is below 1, because the maximum achievable AUC can be calculated as 1 − a/2, where a represents the proportion of pixels occupied by the study species (Phillips et al. 2006). Second, we evaluated the capability of models to correctly predict rotan presence outside the calibration area by analysing omission errors (Lobo et al. 2008). We used a χ2 test (1 df) to compare observed frequencies of correct and incorrect predictions, and therefore to assess if models predict distribution significantly better than expected under random expectations (Roura-Pascual et al. 2004). Third, to further evaluate whether the native model correctly predicts invasion probability outside the native range, we used regression models comparing bioclimatic suitability of grid cells outside the native range with known presence or absences of rotan. Records of alien species are affected by strong spatial autocorrelation because of the joint effect of multiple factors, including spatial clustering of surveyed localities (Fig. 1), strong spatial structure of climatic data, and because species dispersal is a spatial process. Such spatial autocorrelation can lead to a biased assessment of model performance (Veloz 2009); in preliminary analyses the residuals of ordinary least squares logistic regression were spatially autocorrelated (Moran’s I = 0.23, permutation P < 0.001). Therefore, we used spatial eigenvector mapping (SEVM), assuming binomial error structure, to build regression models relating presence/absence in surveyed grid cells to bioclimatic suitability. SEVM allows the translation of spatial arrangement of data points into explanatory variables that capture the spatial effects (Dormann et al. 2007). In SEVM, eigenvectors reducing the spatial autocorrelation of residuals are computed and then included as spatial predictors into generalized linear models; we performed SEVM as implemented by Dormann et al. (2007). Recent comparisons showed that this is among the most flexible and efficient spatial regression methods (Dormann et al. 2007; Bini et al. 2009). We used Nagerkerke’s R 2 (R 2 N) to evaluate the amount of variation explained by SEVM. We built SEVM using the package Spdep in R 2.5 (http://www.r-project.org).
Results
Analysis of the features of rotan range expansion
Since 1916, rotan was introduced into several distant localities throughout Eurasia (Table 1); these introductions led to the rise of several new isolated subranges (e.g., Saint Petersburg; Moscow; Nizhniy Novgorod, Ilev; Baikal; Lithuania; Minsk; West Ukraine, Lviv; Arkhangelsk, Plestsy; Tomsk; Upper-Amur). Some primary introductions were documented (Fig. 1b; Table 1). Many of these newly-appeared populations rapidly and extensively expanded their range and presently some of the subranges have merged (Fig. 1b). Thus, the shape of the current invaded range of rotan is partially determined by location of the initial introduction points.
Local dispersion of rotan from the first invasive populations (e.g. Saint Petersburg, Moscow and Plestsy subranges: Fig. 2; Table 1) was due to translocation by local people (Dmitriev 1971; Shlyapkin and Tikhonov 2001; Reshetnikov and Reshetnikova 2002). Spread from the first-colonised waterbodies in Moscow, Nizhniy Novgorod and Baikal rotan subranges was at least partly due to self-distribution via water connections (Dmitriev 1971; Pronin 1982; Zaloznykh 1982; our data). These lessons highlight the importance of the uncontrolled translocations and water connections in the spread of rotan at the initial stage of enlarging of new subranges.

Features of the expansion of the fish rotan, Perccottus glenii. A records of rotan and major highways (dotted lines); B spatio-temporal dynamics of rotan records for Ukraine (Lviv) subrange, including subsequent dispersion to Poland, Slovakia, Hungary, Serbia, Bulgaria, Romania, and Moldova; C spatio-temporal dynamics of rotan records for the Baikal isolated part of the range. Black circles presence records of rotan. Open squares with a dot inside documented long-distance introductions. Open squares without a dot records located at considerable distances from other simultaneously established populations. See Table 1 for an explanation of the numbers
During the further expansion of Moscow and Nizhniy Novgorod subranges, until 1990, rotan was recorded in a limited number of locations westwards and eastwards of the initial introductions. These secondary localities were mainly along major highways (Fig. 2a) although subsequent dispersion masks this pattern. These features of invasion dynamics together with reports about a number of local introductions (Reshetnikov and Chibilev 2009) confirm the role of uncontrolled transportation by humans in the spread of this species during long-term development of the new subranges.
Most records of rotan are restricted to small isolated floodplain waterbodies where the species reaches high population density. Reports of rotan from large rivers are rare; however a large-scale examination of rotan populations reveals strong association with river system (Figs. 1a, 2). This illustrates that rivers are common pathways for rotan self-dispersal. Rotan distribution within a river system can be well described through the metapopulation concept (Hanski and Gilpin 1997), with source populations located in floodplain waterbodies producing emigrants, especially during floods, whereas large rivers serve as important long-distant transmission corridors.
Rotan expansion seems to be more rapid downstream than upstream. For example, in the Danube river basin this species had not been found far upstream in tributaries for a long time, but was recorded hundreds kilometres downstream, in the Romanian-Bulgarian sector of the Danube (Jurajda et al. 2006) (Fig. 2b). A similar situation is known for the Baikal subrange (Fig. 2c). The earliest reports from the uppermost part of the Volga river basin came from fish farms. This suggests that upstream expansion may be due to human activities rather than by self-distribution.
The importance of rivers in the spread of rotan is particularly notable during the expansion in West Ukraine (Lviv subrange) (Fig. 2b). This example of rapid range expansion from the local centre of invasion also illustrates the importance of upstream territories. As a result of local anthropogenic translocations, rotan reached the heads of rivers and then spread downstream through new water basins. The Lviv subrange of rotan spread to the Vistila, Danube, Dnepr, Don, and Dniester river basins on the territories of Poland, Belarus, Slovakia, Hungary, Serbia, Bulgaria, Romania, and Moldova (Fig. 2b). Thus, the appearance of rotan in the upper part of a new basin is especially dangerous.
Species distribution models
Our results suggest a high suitability, and therefore a risk of invasion of rotan, in several areas of China, Western Siberia, and Western Europe where this fish is currently absent (Fig. 3). The SDM, calibrated using records within the native range (native model), predicted climatic suitability in a large strip through Eurasia up to the Atlantic coast, including several areas of Western Europe where populations of rotan are not presently recorded (Fig. 3a). Following this model, growing degree days accounted for most of explained variation, whereas maximum air temperature contributed the least (Table 2). The native model showed high AUC for both the native and the invaded parts of the range, and predicted invasion localities significantly better than random expectations (Table 3). For instance, this model predicted high suitability in 85% of grid cells actually invaded by rotan. All the cross-validated models were extremely similar, suggesting that the model is robust (Table 3).

Bioclimatic suitability for the fish rotan Perccottus glenii in Eurasia following Maxent models (a) calibrated using native records; b calibrated using invasive records; c calibrated using records from both native and invasive parts of the range. Darker colours indicate higher suitability. Data used for calibration: black crosses presence records within the native range; black circles presence within the invaded range; open circles absence records outside the native range
SEVM was employed to evaluate the capability of the native model to correctly identify areas invaded or not invaded. In SEVM, grid cells with presence records had bioclimatic suitability much higher than surveyed localities without known presence (χ 2 1 = 77.2, P < 0.001). SEVM extracted nine eigenvectors reducing spatial autocorrelation; the extracted eigenvectors significantly explained rotan distribution within the invaded range (χ 2 9 = 470.4, P < 0.001). The SEVM combining bioclimatic suitability with spatial autocorrelation explained most of variation in presence/absence across grid cells (R 2 N = 0.86).
Suitability predicted by the invasive model was similar to that of the native model (Fig. 3a, b). The amount of variation explained by environmental variables was comparable between the two models (Table 2). The invasive model showed high AUC for both the native and the invaded range, and predicted native localities significantly better than random expectations (Table 3), indicating a very good predictive performance. For instance, this model predicted high suitability in 88% of grid cells where native rotan populations are actually present. All the cross validated models yielded similar results.
Suitability predicted by the all data model (Fig. 3c) was very similar to that predicted by the invasive model. The amount of variation explained by environmental variables was similar to the other two models (Table 2). The all data model showed high cross-validated AUC, suggesting that its performance is robust (Table 3). When projected to North America, the all data model predicted high suitability in wide areas of north-eastern United States and south-eastern Canada (Fig. 4).

Bioclimatic suitability for the fish rotan Perccottus glenii in North America following the Maxent model calibrated using records of both native and invasive records. See Fig. 3 for colour scale
Discussion
Bioclimatic suitability
Species distribution models are key tools to assess the risk of invasion, but it may be difficult to fit bioclimatic models to aquatic species. Collecting extensive information on local water features is challenging and integrating microhabitat features into large-scale SDMs is complex (but see also Whittier et al. 2008; Kumar et al. 2009). On the other hand, large-scale environmental layers are easily available and therefore appealing for large-scale SDM if they provide valuable information on aquatic systems. Water temperature (which would be a relevant parameter for aquatic species) can be quite different from air temperature because of the thermal inertia of waterbodies which might smooth short-term oscillations of air temperature. Nevertheless, at the continental spatial scale, there is probably strong correlation between the features of terrestrial and freshwater environments. At this scale, bioclimatic variables describing terrestrial ecosystems may therefore be considered good proxies of unmeasured water features. Our analyses showed that bioclimatic layers can successfully describe the invasion dynamics of a freshwater fish at the continental scale; validation using independent datasets showed very good performance (Table 3). Nevertheless, it should be noted that rotan populations are restricted mainly to shallow waterbodies, which may be particularly influenced by aerial climate conditions; broad scale climatic layers might be less useful for species closely associated with large waterbodies. The long-term range dynamics of rotan differs from the most other fish species (Gilbert and Williams 2002; Reshetnikov YS 2003) because it depends on climate variables rather than on river basin borders.
Growing degree days explained the highest proportion of variation, while maximum temperature was less important (Table 2). Growing degree days may be particularly important at high latitudes by limiting reproduction, in spite of high physiological cold resistance of rotan (Kirpichnikov 1945; Sokolov 2001). The native and invasive calibrated models showed some differences, for example in estimating the southern border: the major difference was a lower suitability in western and southern Europe and a higher suitability in eastern China suggested by the invasive model. We note that the founders of European invasive populations were imported from the northern part of the native range (Table 1), and those individuals might be better pre-adapted to northern climatic conditions (Fitzpatrick et al. 2007). On the other hand, the overall differences between models were minor and could also be influenced by the process of calibration, by clusters of populations not filling the whole fundamental niche of the species, or by the use of environmental variables with indirect effects on the study species (e.g., Rödder et al. 2009). Water balance and precipitation may be also important (Table 2) for the species depending on shallow, isolated or even temporary waterbodies (Nikolskiy 1956). The southern boundary of the range approximately coincides with an isopleth showing the border between surplus and deficit of water due to balance of atmospheric precipitations and evaporation (Lean et al. 1990). Our models focused on large scale climatic variables, but small scale habitat features can also be important (Ficetola et al. 2007). For example, the native model did not predict the appearance of rotan in the mountainous Baikal region, where rotan is distributed along narrow river valleys and the Lake Baikal shoreline.
The climatic variables considered do not fully explain the absence of rotan from the lower sections of southern rivers (Dnestr, Dnepr, Don) where climatic conditions are apparently suitable (Figs. 1a, 2a, 3c). Some large rivers have long sections with fast current and few oxbow lakes, bays, or other biotopes suitable for rotan. Theoretically, these landscape limitations, as well as biotic barriers caused by diverse fish communities may limit or at least delay the expansion of rotan. On the other hand, large, deep, and well-oxygenated lakes and rivers are more stable and may provide suitable microclimatic conditions outside the southern border of the potential range. However, large lakes are usually characterized by more diverse fish communities, including predatory fish (e.g., Perca fluviatilis and Esox lucius) which effectively control rotan (Zaloznykh 1982). The richness of native communities might increase resistance to the invasion (Kennedy et al. 2002). Nevertheless, long-term regional observations show that rotan may survive at low population densities in some large waterbodies despite diverse ichthyofauna and presence of the above-mentioned fish predators (Reshetnikov AN 2003).
Areas at high risk of invasion
Rotan is currently absent in several areas of Eurasia where bioclimatic models suggest high suitability, and therefore a risk of invasion (Fig. 3c). Although all our models suggest that the mountainous regions of Europe constitute a barrier to rotan, two climatically suitable corridors may connect already colonised areas to Western Europe: a northern corridor which includes Poland, Germany and western countries, and a southern corridor extending from the Danube river basin through Croatia, Slovenia, and Italy to France (Fig. 3). The northern corridor includes artificial canals connecting many rivers. The Oder is under high risk of invasion.
The Sayany Mountains may act as a barrier to the enlarging of the Baikal subrange of rotan westward, although rotan might reach the Enisey River from Lake Baikal via the Angara River (Figs. 1a, 2c). Conversely, the Upper-Amur invasive subrange (in the territories of Russia and Mongolia) is obviously close to its climatic limits (Fig. 3). Models also show high suitability in the adjacent Chinese territory westwards from the Hinggan Mountains. This may be evidence that hitherto unknown Chinese populations of rotan could be a source for sudden invasion and formation of an Upper-Amur subrange (Reshetnikov 2010). Japan, the southern British Isles and part of North America also show high suitability (Figs. 3, 4), but geographical barriers may not prevent human-mediated introductions.
Control of rotan expansion
Due to the impossibility of eradication from whole water systems, prevention of introduction may be the best strategy to control rotan expansion. Transportation and sale of rotan should be forbidden. Strict control of fish-farm stocking materials is necessary. Fishermen, aquarists and even fish-farm staff may be unaware of the problems caused by rotan. Education aimed at increasing awareness is therefore desirable. Additionally, monitoring aquatic sites and immediate eradication of populations introduced to small isolated waterbodies is recommended, with special attention to upstream portions of water basins. After the identification of a new invasive population, some actions may limit further dispersal: (1) forbidding public access to the waterbody, (2) hydrological isolation the waterbody, and (3) immediate eradication of the population using chemical methods or by drying the waterbody followed by processing of the substrate with chemicals (e.g., Zaloznykh 1982). A successful example of such actions is known in the Valdayskiy national park, Russia, where a population of rotan in an isolated fire pond was successfully eradicated in 1998 (A. N. Glasov, pers. comm.). Rotan is still absent in the park. However, despite this local positive experience, reliable and effective methods for preventing large-scale geographical expansion in areas with high climatic suitability are currently lacking. Therefore, without implementing preventative measures, additional areas may be colonized by rotan with undesirable consequences for native biodiversity of freshwater ecosystems of Europe (Spanovskaya et al. 1964; Reshetnikov AN 2003).
Conclusion
The invasive fish rotan has already occupied most climatically suitable areas within the Palearctic. Nevertheless, the expansion of this species has not reached its limits. Some large areas of Europe and Asia where rotan is currently absent have a high future invasion risk (Fig. 3c). At the present time, reliable preventive methods against large-scale geographical expansion of rotan within Eurasia are absent; it is therefore urgent to implement strategies aimed reducing the risk of invasion. Our analysis showed that long-term range dynamics of an invasive freshwater species may depend on climate variables rather than on river basin borders. Models based on large-scale bioclimatic variables can effectively predict the invasion of a freshwater species restricted to shallow water habitats.
References
Bini LM, Diniz-Filho JA, Rangel TFLVB et al (2009) Coefficient shifts in geographical ecology: an empirical evaluation of spatial and non-spatial regression. Ecography 32:193–204
Bomford N, Barry SC, Lawrence E (2010) Predicting establishment success for introduced freshwater fishes: a role for climate matching. Biol Invasions 12:2559–2571
Ćaleta M, Jelić D, Buj I, Zanella D, Marčić Z, Mustafić P, Mrakovčić M (2011) The first record of alien invasive species rotan Perccottus glenii in Croatia. J Appl Ichthyol 27:146–147
Diripasko OA (1986) First case of capture of sleeper-rotan Perccottus glenii (Eleotrididae) in Kaliningrad province. Vopr Ihtiol 36:842 (in Russian)
Dmitriev M (1971) Be careful: rotan. Rybovod Rybol 1:26–27 (in Russian)
Dormann CF, McPherson JM, Araujo MB, Bivand R, Bolliger J, Carl G, Davies RG, Hirzel A, Jetz W, Kissling WD, Kühn I, Ohlemüller R, Peres-Neto PR, Reineking B, Schröder B, Schurr FM, Wilson R (2007) Methods to account for spatial autocorrelation in the analysis of species distributional data: a review. Ecography 30:609–628
Drake JM, Bossenbroek JM (2004) The potential distribution of zebra mussels in the United States. Bioscience 54:931–941
Elith J, Phillips SJ, Hastie T, Dudık M, Chee YE, Yates CJ (2011) A statistical explanation of MaxEnt for ecologists. Divers Distrib 17:43–57
Elovenko VN (1981) Systematic position and geographical distribution of fishes of family Eleotridae (Gobioidei, Perciformes) introduced in waterbodies of European part of the USSR, Kazakhstan and Central Asia. Zool Zhurnal 60:1517–1522 (in Russian)
Ficetola GF, Thuiller W, Miaud C (2007) Prediction and validation of the potential global distribution of a problematic alien invasive species—the American bullfrog. Divers Distrib 13:476–485
Ficetola GF, Maiorano L, Falcucci A, Dendoncker N, Boitani L, Padoa-Schioppa E, Miaud C, Thuiller W (2010) Knowing the past to predict the future: land-use change and the distribution of invasive Bullfrogs. Global Change Biol 16:528–537
Fitzpatrick MC, Hargrove WW (2009) The projection of species distribution models and the problem of non-analog climate. Biodivers Conserv 18:2255–2261
Fitzpatrick MC, Weltzin JF, Sanders NJ, Dunn RR (2007) The biogeography of prediction error: why does the introduced range of the fire ant over-predict its native range? Global Ecol Biogeogr 16:24–33
Fouquet A, Ficetola GF, Haigh A, Gemmell N (2010) Using ecological niche modelling to infer past, present and future environmental suitability for Leiopelma hochstetteri, an endangered New Zealand native frog. Biol Conserv 143:1375–1384
Fuller PL, Nico LG, Williams JD (1999) Nonindigenous fishes introduced into inland waters of the United States. Bethesda, Maryland
Gilbert CR, Williams JD (2002) Field guide to fishes. North America. Alfred A. Knopf, New York
Golovanova IL, Smirnov AK, Slyapkin IV (2007) Influence of temperature and heavy metals on activity of digestive carbohidrazes of rotan Percottus glenii. In: Vechkanov VS (ed) Ichthyologic investigations on inland waterbodies. MordSU, Saransk, pp 29–31 (in Russian)
Grabowska J, Grabowski M, Pietraszewski D, Gmur J (2009) Non-selective predator–the versatile diet of Amur sleeper (Perccottus glenii Dybowski, 1877) in the Vistula River (Poland), a newly invaded ecosystem. J Appl Ichthyol 25:451–459
Guisan A, Thuiller W (2005) Predicting species distribution: offering more than simple habitat models. Ecol Lett 8:993–1009
Hanski IA, Gilpin ME (1997) Metapopulation biology: ecology, genetics and evolution. Academic Press, San Diego
Harka A, Megyer CS, Bereczki CS (2008) Amurgeb (Perccottus glenii) a Balatonnal. Halaszat 101:62 (in Hungarian)
Hulme PE (2006) Beyond control: wider implications for the management of biological invasions. J Appl Ecol 43:835–847
Jeschke JM, Strayer DL (2005) Invasion success of vertebrates in Europe and North America. Proc Nat Acad Sci USA 102:7198–7202
Jeschke JM, Strayer DL (2008) Are threat status and invasion success two sides of the same coin? Ecography 31:124–130
Jiménez-Valverde A, Lobo JM, Hortal J (2008) Not as good as they seem: the importance of concepts in species distribution modelling. Divers Distrib 14:885–890
Jurajda P, Vassilev M, Polacik M, Trichkova T (2006) A first record of Perccottus glenii (Perciformes: Odontobutidae) in the River Danube in Bulgaria. Acta Zoologica Bulgarica 58:279–282
Kearney M, Porter W (2009) Mechanistic niche modelling: combining physiological and spatial data to predict species’ ranges. Ecol Lett 12:334–350
Kennedy TA, Naeem S, Howe K, Knops JMH, Tilman D, Reich P (2002) Biodiversity as a barrier to ecological invasions. Nature 417:363–368
Kirpichnikov VS (1945) Biology of Perccottus glehni Dyb. (Eleotridae) and possibilities of its utilization in the control of encephalitis and malaria. Bull MOIP 50:14–27 (in Russian)
Koščo J, Manko P, Miklisová D, Košuthová L (2008) Feeding ecology of invasive Perccottus glenii (Perciformes, Odontobutidae) in Slovakia. Czech J Anim Sci 53(11):479–486
Kuderskiy LA (1980) Rotan in ponds of Gorkiy province. Rybohoz izuč vnutr vodoemov 25:28–33 (in Russian)
Kumar S, Spaulding SA, Stohlgren TJ, Hermann KA, Schmidt TS, Bahls LL (2009) Potential habitat distribution for the freshwater diatom Didymosphenia geminata in the continental US. Front Ecol Environ 7:415–420
Lean G, Hinrichsen D, Markham A (1990) Atlas of the environment. Prentice Hall Press, New York
Lehtonen H (2002) Alien freshwater fishes of Europe. In: Leppakoski E, Gollasch S, Olenin S (eds) Invasive aquatic species of Europe, distribution, impacts and management. Kluwer Academic Publishers, Dordrecht, pp 153–161
Leung B, Lodge DM, Finnoff D, Shogren JF, Lewis MA, Lamberti G (2002) An ounce of prevention or a pound of cure: bioeconomic risk analysis of invasive species. Proc R Soc Lond B Biol Sci 269:2407–2413
Lobo JM, Jiménez-Valverde A, Real R (2008) AUC: a misleading measure of the predictive distribution models. Global Ecol Biogeogr 17:145–151
Machlin MD (1960) Amur eleotris. Priroda 2:113–114 (in Russian)
Manel S, Williams HC, Ormerod SJ (2001) Evaluating presence–absence models in ecology: the need to account for prevalence. J Appl Ecol 38:291–931
Manteifel YB, Reshetnikov AN (2001) Selective predation on tadpoles of three anuran species. Zh Obshch Biol 62:150–156 (in Russian)
Medley KA (2010) Niche shifts during the global invasion of the Asian tiger mosquito, Aedes albopictus Skuse (Culicidae), revealed by reciprocal distribution models. Global Ecol Biogeogr 19:122–133
Miller PJ, Vasil’eva ED (2003) Perccottus glenii Dybowski 1877. In: Miller PJ (ed) The freshwater fishes of Europe, vol 8/1. Aula-Verlag, Weibelsheim, pp 135–156
New M, Lister D, Hulme M, Makin I (2002) A high-resolution data set of surface climate over global land areas. Clim Res 21:1–25
Nikolskiy GV (1956) Fishes of the Amur river basin. Results of the Amur ichthyological expedition 1944–1949. AN SSSR, Moscow (in Russian)
Nogués-Bravo D (2009) Predicting the past distribution of species climatic niche. Global Ecol Biogeogr 18:521–531
Pearson RG, Raxworthy CJ, Nakamura M, Peterson AT (2007) Predicting species distributions from small numbers of occurrence records: a test case using cryptic geckos in Madagascar. J Biogeogr 34:102–117
Phillips SJ, Dudík M (2008) Modeling of species distributions with Maxent: new extensions and comprehensive evaluation. Ecography 31:161–175
Phillips SJ, Anderson RP, Schapire RE (2006) Maximum entropy modelling of species geographic distributions. Ecol Model 190:231–259
Pronin NM (1982) About ecological consequences of acclimatisation works in the Baikal Lake basin. In: Biological resources of Trans-Baikal region and its protection. Buryatskiy filial SB AS USSR, Ulan-Ude, pp 3–18 (in Russian)
Puesink JL (2005) Global analysis of factors affecting the outcome of freshwater fish introductions. Conserv Biol 19:1883–1893
Reshetnikov AN (2001) Influence of introduced fish Perccottus glenii (Odontobutidae, Pisces) on amphibians in small waterbodies of Moscow region. Zh Obshch Biol 62(4):352–361 (in Russian)
Reshetnikov AN (2003) The introduced fish, rotan (Perccottus glenii), depresses populations of aquatic animals (macroinvertebrates, amphibians, and a fish). Hydrobiologia 510:83–90
Reshetnikov AN (2004) The fish Perccottus glenii: history of introduction to western regions of Eurasia. Hydrobiologia 522:349–350
Reshetnikov AN (2008) Has expansion of the fish rotan covered the Podkamennaya Tunguska river basin? In: Timoshok EE, Skorokhodov SN (eds) Proceedings of the Tungusskiy State natural reserve. Issue 2. Izdatelstvo nauchno-tekhnicheskoy literatury, Tomsk, pp 131–133 (in Russian)
Reshetnikov AN (2010) The current range of Amur sleeper Perccottus glenii Dybowski, 1877 (Odontobutidae, Pisces) in Eurasia. Russ J Boil Inv 1:119–126. doi:10.1134/S2075111710020116
Reshetnikov AN, Chibilev EA (2009) Distribution of the fish rotan (Perccottus glenii Dybowski, 1877) in the Irtysh River basin and analysis of possible consequences for environment and people. Contemp Probl Ecol 2:224–228
Reshetnikov AN, Petlina AP (2007) Distribution of the fish rotan (Perccottus glenii Dybowski, 1877) in the Ob’ River. Sibirskii Ekologicheskii Zhurnal 4:551–555 (in Russian)
Reshetnikov AN, Reshetnikova NM (2002) Alien species registered in the natural reserve “Lake Glubokoe” (Moscow province, Russia). Proc Hydrobiol Station “Lake Glubokoe” 8:172–193 (in Russian)
Reshetnikov YS (ed) (2003) Atlas of Russian freshwater fishes, vol 1 and 2. Nauka, Moscow (in Russian)
Rizevskiy VK, Plyuta MV, Ermolaev VV (1999) The morphological characteristic of Amur sleeper Perccottus glehni Dybowski from Minsk water reservoir system. Proc Natl Acad Sci Belarus 3:119–121 (in Russian)
Rödder D, Schmidtlein S, Veith M, Lötters S (2009) Alien invasive slider turtle in unpredicted habitat: a matter of niche shift or of predictors studied? PLoS ONE 4:e7843. doi:10.1371/journal.pone.0007843
Roura-Pascual N, Suarez AV, Goomez C, Pons P, Touyama Y, Wild AL, Peterson AT (2004) Geographical potential of Argentine ants (Linepithema humile Mayr) in the face of global climate change. Proc R Soc B 271:2527–2534
Sato M, Kawaguchi Y, Nakajima J, Mukai T, Shimatani Y, Onikura N (2010) A review of the research on introduced freshwater fishes: new perspectives, the need for research and management implications. Landsc Ecol Eng 6:99–108
Shlyapkin IV, Tikhonov SV (2001) Distribution and biological features of rotan Perccottus glenii Dybowski in water bodies of the upper Povolzhie. In: Proceedings of United State—Russia invasive species workshop. IBIW, Borok, pp 203–204 (in Russian)
Sillero N, Tarroso P (2010) Free GIS for herpetologists: free data sources on Internet and comparison analysis of proprietary and free/open source software. Acta Herpetol 5:63–85
Sinelnikov AM (1976) Feeding of rotan in flood plain water bodies of Razdolnaya River (Primorie territory). In: Biology of fishes of the far East. DGU, Vladivostok, pp 96–99 (in Russian)
Sokolov LI (2001) About wintering of rotan Perccottus glenii in Amur water bodies. Vopr Ihtiol 41:572–573 (in Russian)
Spanovskaya VD, Savvaitova KA, Potapova TL (1964) About variability of rotan (Perccottus glehni Dyb fam. Eleotridae) under acclimatisation. Vopr Ihtiol 4:632–643 (in Russian)
Steiner FM, Schlick-Steiner BC, VanDerWal J, Reuther KD, Christian E, Stauffer C, Suarez AV, Williams SE, Crozier RH (2008) Combined modelling of distribution and niche in invasion biology: a case study of two invasive Tetramorium ant species. Divers Distrib 14:538–545
van Wilgen NJ, Roura-Pascual N, Richardson DM (2009) A quantitative climate-match score for risk-assessment screening of reptile and amphibian introductions. Environ Manag 44:590–607
Veloz SD (2009) Spatially autocorrelated sampling falsely inflates measures of accuracy for presence-only niche models. J Biogeogr 36:2290–2299
Whittier TR, Ringold PL, Herlihy AT, Pierson SM (2008) A calcium-based invasion risk assessment for zebra and quagga mussels (Driessena spp.). Front Ecol Environ 6:180–184
Wisz MS, Hijmans RJ, Li J, Peterson AT, Graham CH, Guisan A (2008) Effects of sample size on the performance of species distribution models. Divers Distrib 14:763–773
Zaloznykh DV (1982) Some aspects of biology of rotan in waterbodies of Gorkiy province. Nazemn Vodn Ekosistemy 5:44–47 (in Russian)
Zaloznykh DV (1984) Rotan in breeding ponds of Gor’kovskaya province and control of this species. Naucn Tr GosNIORH 217:95–102 (in Russian)
Acknowledgements
The authors thank 141 specialists who kindly provided information about records of rotan throughout Eurasia. All of them are listed personally earlier (Reshetnikov 2010). ANR was supported by the Russian Fund for Fundamental Researches (project 08-04-00679-a). GFF was supported by a post-doctoral fellowship of the University of Milano-Bicocca. The valuable comments of M. C. Fitzpatrick, D. C. Chapman, C. S. Kolar and two anonymous referees greatly improved an earlier draft of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Reshetnikov, A.N., Ficetola, G.F. Potential range of the invasive fish rotan (Perccottus glenii) in the Holarctic. Biol Invasions 13, 2967–2980 (2011). https://doi.org/10.1007/s10530-011-9982-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10530-011-9982-1