
Abstract
In fresh waters, non-native invertebrate species preferentially spread via navigation waterways, where they often dominate assemblages. Littoral habitats in navigation waterways are regularly exposed to ship-induced waves. We conducted experiments to test the effects of artificial wave exposure on the relative performance of wide-spread native and non-native species. We compared physiological and behavioural response variables (i.e. growth rate, glycogen content, feeding and swimming activity) of two amphipods (native Gammarus roeselii and non-native Dikerogammarus villosus) and two gastropods (native Bithynia tentaculata and non-native Physella acuta) subject to wave and control (i.e. no wave) treatment flumes across a 6-week period. Growth, and in part glycogen content (as a measure of energy storage), were significantly reduced after exposure to waves in native invertebrates, but not in non-native invertebrates. The reduction in growth may be associated with the disturbance effects of waves, such as the higher swimming activity of G. roeselii and lower food uptake of B. tentaculata. In comparison, the effective hiding behaviour observed for D. villosus and good swimming ability of P. acuta, were identified as important traits facilitating the successful colonisation of the harsh habitat conditions of littoral waterways. Our study demonstrates that artificial wave regimes may contribute significant selective pressure, thus explaining the observed dominance of non-native species in navigational waterways. The success of non-native species under the harsh hydraulic habitat conditions of these socio-economically driven ecosystems may consequently be traced directly to behavioural and/or physiological traits.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Freshwater environments are particularly affected by biological invasions (Sala et al. 2000; Strayer 2010). For example, there are 432 and 744 records of non-native species that have invaded Europe and North America to date (Strayer 2010). By connecting freshwater systems that were previously separated by natural biogeographical boundaries, artificial navigational waterways form important invasion routes for non-native species, particularly when they include a sea port as entrance gate for non-native species from overseas (e.g. bij de Vaate et al. 2002). Freshwater non-native species may be transported attached to ship hulls (within inland waterway systems) or in ballast water (e.g. Leuven et al. 2009; Mills et al. 1993). Moreover, artificial and natural waterways exhibit altered, and even novel habitat conditions, that are produced by multiple human impacts, which do not necessarily meet the habitat requirements of native fauna. As a result, non-native species are often able to successfully colonise these habitats (Byers, 2002), consequently outcompeting native fauna to dominate or even replace existing assemblages in navigational waterways (Borcherding and Sturm 2002).
Several approaches exist to determine which features influence the long-term successful establishment of non-native species in aquatic systems. For example, it is known that successful non-native invertebrates often exhibit ecological traits that may be generally beneficial in disturbed environments, such as short generation time, early sexual maturity, high fecundity and euryhalinity (bij de Vaate et al. 2002). Additional characteristics include high tolerance to changes in temperature and desiccation (e.g. Larson et al. 2009) or to pollution and habitat degradation (Grabowski et al. 2007). However, clarification is still required about why non-native invertebrate species successfully colonise particularly navigational waterways, when arriving in new ranges after transportation by ship or active migration. Waterways are characterised by significantly enhanced levels of hydrodynamic disturbance, due to waves being generated by passing commercial and recreational ships. As a result, ship-induced waves dislodge benthic invertebrates from their habitats (Bishop 2008; Gabel et al. 2008), thus increasing exposure to predation risk if predators that are able to cope with wave disturbance are present (Gabel et al. 2011). Furthermore, invertebrates may also require more energy for locomotion in order to return to their initial habitats.
Therefore, we hypothesised that disturbance by ship-induced waves produces a shift in the community composition of benthic invertebrates occupying navigational waterways towards non-native species. Logically, the lower susceptibility of non-native species should be reflected in physiological or behavioural adaptive traits. Hence, we predicted that individual growth rate or energy storage are reduced and swimming activity rates or feeding behaviour are altered under artificially increased wave regime, for native species but not for non-native species.
Methods
Experimental design
Experiments were conducted in two artificial flumes (each of 3.0 m length, 0.8 m width, 0.6 m height). Inside each flume, a horizontal plane of 1.6 m length, ending in a 26°slope of 45 cm length, was used as the study area (Fig. 1). Perspex walls longitudinally separated the study area into three compartments, which were used as experimental replicates. Both ends of the study areas were closed with nets (of 1 mm mesh size) to prevent the escape of invertebrates. In each compartment, sand (d 50 = 2.0 mm) was glued to the bottom and three stones (~13 × 10 × 4 cm³ each) were placed randomly to offer shelter. The indoor flumes were filled with tap water and had a daily light–dark cycle of 14:10 h. The water level of the study area was 10 cm, while the section in front of the net had a lower bottom, with a water level of 30 cm (following the design of Gabel et al. 2008). In the wave-treatment flume, a wave generator was installed, while the other flume served as a control without waves. The wave generator created waves automatically by pushing the water mass with a polyvinyl chloride (PVC) plate fixed to an arm, which was operated by a rotating motor (Valeo 15094704, Valeo, Bietigheim-Bissingen, Germany). The duration and strength of movement were regulated electronically by a PDA (FSC Pocket Loox N560, Fujitsu Siemens, Munich, Germany). Waves of 15 s duration were created in the wave flume every 10 min from 06:00 to 20:00 to mimic typical daily navigation traffic in an inland waterway.

Sketch of the experimental wave flume. A similar set up was used for the control flume except for the wave generator
To ensure similar experimental conditions in the replicated parts of the wave flume, orbital velocities were determined at seven locations in each compartment using an Acoustic Doppler Velocimeter (ADV; Micro ADV 16 MHz, 50 Hz recording; Sontek, San Diego, CA, U.S.A.). The locations included (1) one directly downstream of the net, (2) one 50 cm downstream of the net, (3) three along a cross section 100 cm behind the net; close to right wall, in the middle and close to the left wall, and (4) one in front of the backward slope. At each point, seven replicated measurements, each of 15 s duration were conducted at 1 cm above the bottom. No significant differences were found among the three compartments at comparable locations (according to ANOVAs with subsequent Scheffe Post-Hoc tests, highest F = 1.765, df = 2, P = 0.193 at the lowest). Hence, the invertebrates experienced similar mean orbital velocities (31.5 ± 3.9 cm s−1) in all compartment replicates.
Wave orbital velocities, frequency of occurrence, duration and daily timing were similar to wave conditions measured at a North Eastern German river (the Havel River), which is an inland waterway providing access for barges and recreational ships from the North Sea to Berlin. At Havel River, wave orbital velocities of 27.4 ± 15.1 cm s−1 were measured, with a frequency of occurrence every 10.3 ± 2.4 min (unpubl. data).
Test animals
Experiments were conducted on two groups of native and non-native species that commonly colonise water bodies in central Europe. The first group comprised the native amphipod Gammarus roeselii Gervais and the non-native amphipod Dikerogammarus villosus (Sowinsky). The second group comprised the native gastropod Bithynia tentaculata L. and the non-native gastropod Physella acuta (Draparnaud). Dikerogammarus villosus originates from the Ponto-Caspian region and disperses mainly through navigational waterways (Holdich and Pöckl 2007). At these sites, D. villosus often replaces other amphipods (e.g. Dick and Platvoet 2000; Pöckl 2007). Physella acuta specimens observed in central Europe may originate from south east Europe (Cope and Winterbourn 2004) or more likely North America (Dillon et al. 2002; Oscoz et al. 2010). This species spreads via navigation waterways and/or by unintentional release from aquaria (Kinzelbach 1995). Physella acuta and B. tentaculata co-occur in many lakes and rivers (e.g. Havel River, unpubl. data.). The native and non-native pairs of species selected for the purposes of this study have similar body sizes, and thus should be affected to a similar extent by the hydrodynamic forces created from waves.
Invertebrates were collected by hand nets in the Spree River (Gammarus roeselii), at the Lake Mueggelsee outlet (Dikerogammarus villosus), in the Havel River, and in the Teltow canal (Bithynia tentaculata), and from aquaria populations (Physella acuta). The sampling sites of G. roeselii, D. villosus and B. tentaculata are moderately exposed to ship-wave disturbance.
Individuals were sorted by body or shell length, in order to include only individuals of comparable length in the experiment. The length of all collected individuals was measured from digital photographs (Eos 350 D, Canon, Krefeld, Germany) using Adobe professional (Adobe Acrobat professional 8, Adobe Systems Inc., San Jose, CA, USA). Amphipod individuals were measured from the base of the antenna to the telson, and gastropods from the apex to the most distant point on the shell.
Experimental procedure
In total, 100 individuals of G. roeselii or D. villosus were placed into each replicated compartment of the control and wave flumes, resulting in a density of 61 individuals m−2. Such amphipod densities are typical in natural environments (Mörtl and Rothhaupt 2003). For the gastropods, 80 individuals of each species were used, corresponding to a density of 49 individuals m-2.
Amphipods were fed ad libitum with commercially available frozen chironomids, because G. roeselii and D. villosus show the highest growth rates when fed with this matter (Gergs and Rothhaupt 2008). Gastropods were fed ad libitum with dried fish flakes and lettuce (Brendelberger and Jurgens 1993). In addition, the animals were able to graze on biofilm growing on the stones and flume walls, or feed on suspended particles.
Water temperature was maintained at a constant 14°C for the amphipods, and 18°C for the gastropods. Each experiment lasted 6 weeks. Body length and dry mass of invertebrates were measured biweekly from 10 randomly chosen individuals from each replicated compartment. Body length was measured from digital photographs, following the same method used for the size selection of invertebrates before the start of the experiments. Dry mass was determined by drying individuals separately at 60°C overnight and weighing them to the nearest 0.01 mg on the following day.
Activities of test animals
The swimming and feeding activity of amphipod individuals were estimated by recording the time (in seconds and minutes, respectively) that each active individual (n > 39 observations per hour) spent swimming in the water column or feeding on provided chironomid prey. Twice a week direct visual observations and time records were collected for a 1 h period at each replicate flume. The behaviour of gastropods was assigned to three categories: (1) inactive, with only the shell being visible, (2) active, when gastropods exposed their foot, head and/or tentacles but without locomotion, and (3) crawling, when gastropods moved through the flume on their feet. The status ‘active’ was interpreted as suspension feeding for B. tentaculata (Brendelberger and Jurgens 1993). The frequency of each activity type was determined relative to the total number of visible individuals (each time more than 90% of remaining individuals) at the time of observation once a day.
Mortality rates and physiological status
At the end of the experiments, mortality rates were determined. We counted the number of living individuals, and estimated mortality rates (in %) as the difference between the initial numbers and the remaining individuals at the end of the experiments, minus the individuals previously removed for analyses. Newly hatched individuals were excluded from analyses.
The physiological status of surviving individuals was estimated based on the glycogen content of body tissue as glycogen is an important indicator for environmental stress (Buckup et al. 2008). Due to the minimum content necessary for glycogen analyses, the use of larger individuals than for other observations were required. For gastropods, the larger individuals (starting length c.f. 1.2 cm) were included in the same experiments as the smaller ones. For amphipods, the larger individuals (starting length c.f. 1.5 cm) were exposed for 4 weeks to the same experimental conditions, but in a separate experiment in order to avoid larger individuals cannibalising smaller ones. The glycogen content of entire animals was analysed by spectrophotometry after treatment with anthrone reagent (Roe and Dailey 1966) and expressed as mg of glycogen per g of wet weight. One sample consisted of five individuals, and was measured in triplicate.
Data analyses and statistics
We used a repeated measurement ANOVA to test for the effects of treatment on the body length and dry mass of organisms over time. The Mann–Whitney test was used to compare the activity and feeding behaviour of amphipods, in addition to the glycogen content and mortality rates of all four investigated species, between wave and control treatments. Observed differences in behavioural category (active, inactive, crawling) frequencies for gastropods were tested with a Chi²-test. Afterwards, separate Chi²-tests were calculated to determine the presence of significant differences of each category between treatments. All statistical tests were performed in PSAW (Version 17, SPSS Inc., Chicago, IL, USA).
Results
Amphipods
For both Dikerogammarus villosus and Gammarus roeselii, there was a significant increase in body length and body weight in both treatments (wave and control) across the experimental period (Fig. 2, ANOVA with repeated measurements, D. villosus: body length: effect of time: df = 2, 8; F = 17.0, P = 0.001; dry mass: time: df = 2, 8; F = 42.9, P < 0.001; G. roeselii: body length: time: df = 2, 8; F = 683.1, P < 0.001; dry mass: time: df = 2, 8; F = 398.4, P < 0.001). While in Dikerogammarus villosus, treatment had no significant effect on either variable (body length: treatment: df = 1, 4; F = 0.4, P = 0.564; interaction between treatment and time: df = 2, 8; F = 1.1, P = 0.370; dry mass: treatment: df = 1, 4; F = 2.7, P = 0.127; interaction: df = 2, 8; F = 3.2, P = 0.081), the body length and body weight of Gammarus roeselii were significantly affected by treatment, and with a significant interaction between treatment and time for body length (Fig. 1, effect of treatment: df = 1, 4; F = 64.8, P < 0.001; interaction between treatment and time: df = 2, 8; F = 9.4, P = 0.008) and dry mass (treatment: df = 1, 4; F = 198.5, P < 0.001; interaction between treatment and time: df = 2, 8; F = 6.3, P = 0.014).

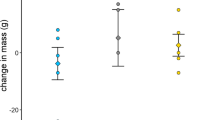
Body length (mm, mean ± SD) and dry mass (mg, mean ± SD) of Dikerogammarus villosus and Gammarus roeselii in the wave (circle) and control (square) treatments
With respect to behavioural and energetic variables, no significant differences between the two treatments were found for D. villosus (Table 1). Gammarus roeselii also did not show any significant difference between treatments for the time spent feeding. However, this species spent significantly more time swimming in the wave treatment than in the control, and exhibited significantly lower body tissue glycogen content in the wave treatment, which was accompanied by a significantly higher mortality rate of individuals (Table 1).
Individuals of Dikerogammarus villosus spent most of the time sheltered under the stones that were provided in both treatments. These individuals left the shelter of stones mainly for capturing food. They often capture a chironomid and returned with their prey under a stone to forage. Furthermore, D. villosus used the refuges offered by the stones more frequently than G. roeselii, and did not increase swimming activity in the wave treatment. In contrast, individuals of G. roeselii remained at the place of encounter with prey items and were shifted around with the captured prey when the next wave passed. During waves, and directly after the passage of a wave, many individuals of G. roeselii left the bottom and swam through the flume. The duration of these swimming phases was nearly twice as long as in the control (wave treatment: 18.0 ± 10.2 s, control: 11.8 ± 7.4 s). Furthermore, only a few individuals sheltered under the stones. Most of the individuals of G. roeselii remained on the sandy bottom, or were loosely attached to the stones being occasionally displaced by the waves.
Gastropods
Both in Physella acuta and Bithynia tentaculata shell length and body weight significantly increased across the duration of the experiment in both treatments (Fig. 3, ANOVA with repeated measurements, P. acuta: shell length: effect of time: df = 2, 8; F = 8.7 P = 0.025; dry weight: time: df = 2, 8; F = 6.2, P = 0.035; B. tentaculata: shell length: time: df = 2, 8; F = 26.4, P = 0.001; dry mass: time: df = 2, 8; F = 36.5, P < 0.001). While in Physella acuta, there was no significant difference in either variable between treatments (shell length: treatment: df = 1, 4; F = 1.7, P = 0.241; interaction: df = 2, 8; F = 0.2, P = 0.651; dry mass: treatment: df = 1, 4; F = 0.1, P = 0.806; interaction: df = 2, 8; F = 0.2, P = 0.853), shell length and body weight of Bithynia tentaculata were significantly lower after 6 weeks of exposure to wave treatment, with a nearly significant interaction between treatment and time for shell length (Fig. 3, shell length: treatment: df = 1, 4; F = 11.3, P = 0.010; interaction: df = 2, 8; F = 2.8, P = 0.136 dry mass: treatment: df = 1, 4; F = 24.9, P = 0.001; interaction: df = 2, 8; F = 4.1, P = 0.059).

Body length (mm, mean ± SD) and dry mass (mg, mean ± SD) of Physella acuta and Bithynia tentaculata in the wave (circle) and control (square) treatments
For P. acuta there was variation in the frequencies of the various behavioural categories (Pearson Chi² = 58.6; df = 2; P < 0.001). However, no significant difference was found between the two treatments for any activity (i.e. being active, inactive or crawling), glycogen content or mortality rate (Table 2). The frequencies of behavioural categories (Pearson Chi² = 88.8; df = 2; P < 0.001) differed significantly for B. tentaculata. Individuals were significantly more inactive and significantly less active when exposed to wave disturbance (Table 2). Crawling was the only activity type that did not significantly differ between the two treatments. Also, the glycogen content and mortality rate of B. tentaculata individuals did not differ significantly between treatments (Table 2).
Similar to D. villosus, P. acuta did not differ in any investigated parameters between wave and control treatments. During the experiments, P. acuta often crawled inverted beneath the water surface and moved regularly adhering to the water surface, while B. tentaculata adhered to solid surfaces. Furthermore, P. acuta reproduced in all compartment replicates of both treatments after 4 weeks.
Discussion
There exists broad evidence that anthropogenic pressure to natural ecosystems may favour the invasion and persistent establishment of non-native species by changing habitat conditions (Byers 2002). Habitat conditions in strongly altered socio-ecological systems (Young et al. 2006) are shaped by new combinations of key environmental factors. These conditions are novel both for native species and potential invaders, so that native species often lose their prior-residence advantage (Byers 2002). Navigation, and accompanying hydrodynamic disturbance due to waves, alters habitat conditions particularly for littoral invertebrate species. Long-term structural habitat degradation combined with the uniformization of habitats due to channelization, shoreline modifications and dredging may further aggravate these effects in a cumulative manner.
Our study provides the first experimental evidence that non-native amphipod and gastropod species are less susceptible to anthropogenic wave disturbance than related native species using similar ecological niches. Wave disturbance was found to have an adverse effect on growth and partial energy storage of native invertebrates, while non-native species were not impacted. In the current study, non-native D. villosus spent a large amount of time sheltered under the provided stones in comparison to native G. roeselii. As a result, this behaviour led to the reduced exposure of individuals to wave stress. This finding supports that of Platvoet et al. (2009a) who demonstrated the efficient use of crevices by D. villosus that perfectly suit its body size. Specimens of P. acuta that were detached by waves were less disturbed, since in agreement with their natural behaviour they actively move in the water column. For good swimmers, such as P. acuta, detachment was obviously less disturbing than for B. tentaculata, which is more dependent on contact with solid structures.
Supporting our results for B. tentaculata, Scheifhacken (2006) found lower growth rates for native Radix ovata under wave conditions than in a control during a 2-week experiment. High mortality rates and a high number of inactive individuals of R. ovata were observed under wave disturbance in these experiments. However, Radix ovata is mostly a lentic species (Moog 2002), which might explain the presence of higher mortality rates under wave action. Additionally, Scheifhacken (2006) recorded species growth rates at several water depths to take into account the depth extension of wave disturbance. Growth reduction was significantly lower in 80 cm, when compared to 40 cm or 20 cm water depth. Hence, it seems that the growth of native gastropods is directly affected by the level of hydraulic disturbance.
Active behaviour by individuals of B. tentaculata, which is associated with suspension feeding (Brendelberger and Jurgens 1993), decreased by more than 50% for individuals exposed to waves, while grazing behaviour did not increase significantly. Feeding on suspended food leads to a higher net energy gain for animals compared to grazing (Brendelberger and Jurgens 1993; Hunter 1975; Tashiro 1982; Tashiro and Colman 1982), resulting in it being the preferred feeding type when both food resources are available (Höckelmann and Pusch 2000). As a consequence, B. tentaculata cannot compensate for lower suspension feeding rates by increased grazing. This may have caused the lower growth rates observed in the wave treatments, since the time spent suspension feeding by individuals was reduced. However, energy storage and mortality were not affected by waves, suggesting that B. tentaculata re-allocated available energy to maintain body functions under wave action at the expense of growth. Consequently, B. tentaculata would not be fully excluded from navigation channels by waves-induced hydraulic stress, but would perform better in channels with low intensity navigation.
Therefore, in the current study we showed that both behavioural and physiological traits, which are often strongly linked, may determine the successful invasion of invertebrate species in novel socio-ecological systems. Such species traits have been experimentally investigated for several non-native amphipods and gastropods, with ecological stresses being assessed by comparing the performance of non-native and native species under different environmental conditions (Table 3). All studies concluded that the recorded differences in species traits between native and non-native species could contribute to invasion success. For example, tolerance to extreme or changing chemical parameters, high fecundity and a broad prey spectrum have been recognised as important physiological or life history traits for successful invasion (Table 3). Also, behavioural properties, such as aggressive behaviour, intraguild predation and pronounced predator avoidance, have been shown to facilitate invasion (Table 3). In the present study, we supplemented this knowledge by providing experimental proof that tolerance against hydrodynamic disturbance, which typically occurs in navigational waterways, is a key trait that could alone explain successful invasions of these systems by neozoans.
The observed differences in behaviour and physiology of native and non-native species may result either from pre-adaptations (e.g. Correa and Gross 2008; Cremer et al. 2008; Schlaepfer et al. 2009), from rapid adaptive changes (e.g. Alford et al. 2009; Whitney and Gabler 2008), or from a combination of both (Henery et al. 2010). However, the assumption of pre-adaptation in non-native species should be considered in parallel with the assumption that certain native species may also exhibit pre-adaptive traits, which facilitate the colonisation of strongly altered socio-ecological systems. Thus, the success of non-native species under novel habitat conditions should also take into account that non-native species might have to compete with native species with similar pre-adaptations (van Kleunen et al. 2010).
Conclusions
Our study demonstrates that repeated exposure to ship-induced waves reduces growth, and to a certain extent energy storage, of native amphipods and gastropods, but not of their non-native counterparts. Since this pattern was observed for two different taxonomic groups of different ecological traits and constitutive capabilities to withstand hydrodynamic disturbance, similar principles might also apply to other non-native species belonging to different zoological orders. We present new evidence that one specific form of anthropogenic river use alone could favour non-native species, and how this effect may be mechanistically explained.
The differing vulnerability of native and non-native invertebrates to hydrodynamic stress is expected to shift community composition in socio-ecological aquatic systems towards domination by non-native species (e.g. in the Rhine River, Borcherding and Sturm 2002). As non-native species arrive from different biogeographical regions and continents, navigational waterways form an arena where species encounter new competitors in specific environmental conditions that have not been previously met (Young et al. 2006). Hence, strong competitive selection of certain traits is expected, leading to a rapid human-induced evolution of invertebrate communities.
References
Alford RA, Brown GP, Schwarzkopf L, Phillips BL, Shine R (2009) Comparisons through time and space suggest rapid evolution of dispersal behaviour in an invasive species. Wildlife Res 36:23–28. doi:10.1071/WR08021
bij de Vaate A, Jazdzewski K, Ketelaars HAM, Gollasch S, van der Velde G (2002) Geographical patterns in range extension of Ponto-Caspian macroinvertebrate species in Europe. Can J Fish Aquat Sci 59:1159–1174. doi:10.1139/F02-098
Bishop MJ (2008) Displacement of epifauna from seagrass blades by boat wake. J Exp Mar Biol Ecol 354:111–118. doi:10.1016/j.jembe.2007.10.013
Borcherding J, Sturm W (2002) The seasonal succession of macroinvertebrates, in particular the zebra mussel (Dreissena polymorpha), in the River Rhine and two neighbouring gravel-pit lakes monitored using artificial substrates. Int Rev Hydrobiol 87:165–181
Brendelberger H, Jurgens S (1993) Suspension feeding in Bithynia tentaculata (Prosobranchia, Bithyniidae), as affected by body size, food and temperature. Oecologia 94:36–42
Bruijs MCM, Kelleher B, van der Velde G, de Vaate AB (2001) Oxygen consumption, temperature and salinity tolerance of the invasive amphipod Dikerogammarus villosus: indicators of further dispersal via ballast water transport. Arch Hydrobiol 152:633–646
Buckup L, Dutra BK, Ribarcki FP, Fernandes FA, Noro CK, Oliveira GT, Vinagre AS (2008) Seasonal variations in the biochemical composition of the crayfish Parastacus defossus (Crustacea, Decapoda) in its natural environment. Comp Biochem Phys A 149:59–67. doi:10.1016/j.cbpa.2007.10.008
Byers JE (2002) Impact of non-indigenous species on natives enhanced by anthropogenic alteration of selection regimes. Oikos 97:449–458
Cope NJ, Winterbourn MJ (2004) Competitive interactions between two successful molluscan invaders of freshwaters: an experimental study. Aquat Ecol 38:83–91
Correa C, Gross MR (2008) Chinook salmon invade southern South America. Biol Invas 10:615–639. doi:10.1007/s10530-007-9157-2
Cremer S, Ugelvig LV, Drijfhout FP, Schlick-Steiner BC, Steiner FM, Seifert B, Hughes DP et al (2008) The evolution of invasiveness in garden ants. PLoS ONE 3:e3838. doi:10.1371/journal.pone.0003838
Dick JTA (2008) Role of behaviour in biological invasions and species distributions; lessons from interactions between the invasive Gammarus pulex and the native G. duebeni (Crustacea: Amphipoda). Contrib Zool 77:91–98
Dick JTA, Platvoet D (2000) Invading predatory crustacean Dikerogammarus villosus eliminates both native and exotic species. Proc R Soc B-Biol Sci 267:977–983
Dick JTA, Elwood RW, Montgomery WI (1995) The behavioural basis of a species replacement–Differential aggression and predation between the introduced Gammarus pulex and the native G. duebeni celticus (Amphipoda). Behav Ecol Sociobiol 37:393–398
Dillon RT, Wethington AR, Rhett JM, Smith TP (2002) Populations of the European freshwater pulmonate Physa acuta are not reproductively isolated from American Physa heterostropha or Physa integra. Invertebr Biol 121:226–234
Gabel F, Stoll S, Fischer P, Pusch M, Garcia XF (2011) Waves affect predator-prey interactions between fish and benthic invertebrates. Oecologia 165:101–109. doi:10.1007/s00442-010-1841-8
Gabel F, Garcia XF, Brauns M, Sukhodolov A, Leszinski M, Pusch MT (2008) Resistance to ship-induced waves of benthic invertebrates in various littoral habitats. Freshw Biol 53:1567–1578. doi:10.1111/j.1365-2427.2008.01991.x
Gergs R, Rothhaupt KO (2008) Feeding rates, assimilation efficiencies and growth of two amphipod species on biodeposited material from zebra mussels. Freshwater Biol 53:2494–2503. doi:10.1111/j.1365-2427.2008.02077.x
Grabowski M, Bacela K, Konopacka A (2007) How to be an invasive gammarid (Amphipoda: Gammaroidea)-comparison of life history traits. Hydrobiologia 590:75–84. doi:10.1007/s10750-007-0759-6
Henery ML, Bowman G, Mraz P, Treier UA, Gex-Fabry E, Schaffner U, Muller-Scharer H (2010) Evidence for a combination of pre-adapted traits and rapid adaptive change in the invasive plant Centaurea stoebe. J Ecol 98:800–813. doi:10.1111/j.1365-2745.2010.01672.x
Höckelmann C, Pusch M (2000) The respiration and filter-feeding rates of the snail Viviparus viviparus (Gastropoda) under simulated stream conditions. Arch Hydrobiol 49:553–568
Holdich DM, Pöckl M (2007) Invasive crustaceans in European inland waters. In: Gherardi F (ed) Biological invaders in inland waters: profiles, distribution, and threats. Springer, Berlin, pp 29–75
Hunter RD (1975) Growth, fecundity, and bioenergetics in 3 populations of Lymnaea-Palustris in Upstate New-York. Ecology 56:50–63
Kinzelbach R (1995) Neozoans in European waters—exemplifying the worldwide process of invasion and species mixing. Experientia 51:526–538
Krisp H, Maier G (2005) Consumption of macroinvertebrates by invasive and native gammarids: a comparison. J Limnol 64:55–59
Larson ER, Magoulick D, Turner C, Layock KH (2009) Disturbance and species displacement: different tolerances to stream drying and desiccation in a native and an invasive crayfish. Freshw Biol 54:1899–1908. doi:10.1111/j.1365-2427.2009.02243.x
Leuven RSEW, van der Velde G, Baijens I, Snijders J, van der Zwart C, Lenders HJR, de Vaate AB (2009) The river Rhine: a global highway for dispersal of aquatic invasive species. Biol Invas 11:1989–2008. doi:10.1007/s10530-009-9491-7
Mills EL, Leach JH, Carlton JT, Secor CL (1993) Exotic species in the Great-Lakes—a history of biotic crises and anthropogenic introductions. J Great Lakes Res 19:1–54
Miranda NAF, Perissinotto R, Appleton CC (2010) Salinity and temperature tolerance of the invasive freshwater gastropod Tarebia granifera. S Afr J 106:55–61. doi:10.4102/sajs.v106i3/4.156
Moog O (ed) (2002) Fauna Aquatica Austriaca—a comprehensive species inventory of Austrian aquatic organisms with ecological notes. Wasserwirtschaftskataster. Bundesministerium für Land- und Forstwirtschaft, Umwelt und Wasserwirtschaft, Vienna
Mörtl M, Rothhaupt KO (2003) Effects of adult Dreissena polymorpha on settling juveniles and associated macroinvertebrates. Int Rev Hydrobiol 88:561–569. doi:10.1002/iroh.200310640
Oscoz Pedro, Tomás P, Durán C (2010) Review and new records of non-indigenous freshwater invertebrates in the Ebro River basin (Northeast Spain). Aquat Invas 5:263–284. doi:10.3391/ai.2010.5.3.04
Pennuto C, Keppler D (2008) Short-term predator avoidance behavior by invasive and native amphipods in the Great Lakes. Aquat Ecol 42:629–641. doi:10.1007/s10452-007-9139-6
Platvoet D, Dick JTA, MacNeil C, van Riel MC, van der Velde G (2009a) Invader-invader interactions in relation to environmental heterogeneity leads to zonation of two invasive amphipods, Dikerogammarus villosus (Sowinsky) and Gammarus tigrinus Sexton: amphipod pilot species project (AMPIS) report 6. Biol Invas 11:2085–2093. doi:10.1007/s10530-009-9488-2
Platvoet D, van der Velde G, Dick JTA, Li SQ (2009b) Flexible omnivory in Dikerogammarus villosus (Sowinsky, 1894) (Amphipoda)—Amphipod Pilot Species Project (AMPIS) Report 5. Crustaceana 82:703–720. doi:10.1163/156854009X423201
Pöckl M (2007) Strategies of a successful new invader in European fresh waters: fecundity and reproductive potential of the Ponto-Caspian amphipod Dikerogammarus villosus in the Austrian Danube, compared with the indigenous Gammarus fossarum and G.roeselii. Freshw Biol 52:50–63. doi:10.1111/j.1365-2427.2006.01671.x
Pöckl M (2009) Success of the invasive Ponto-Caspian amphipod Dikerogammarus villosus by life history traits and reproductive capacity. Biol Invas 11:2021–2041. doi:10.1007/s10530-009-9485-5
Roe JH, Dailey RE (1966) Determination of glycogen with anthrone reagent. Anal Biochem 15:245–250
Sala OE, Chapin FS, Armesto JJ, Berlow E, Bloomfield J, Dirzo R, Huber-Sanwald E, Huenneke LF, Jackson RB, Kinzig A, Leemans R, Lodge DM, Mooney HA, Oesterheld M, Poff NL, Sykes MT, Walker BH, Walker M, Wall DH (2000) Biodiversity—global biodiversity scenarios for the year 2100. Science 287:1770–1774
Scheifhacken N (2006) Life at turbulent sites—Benthic communities in lake littorals interacting with abiotic and biotic constraints. Dissertation, University of Constance
Schlaepfer DR, Glättli M, Fischer M, Van Kleunen M (2009) A multi-species experiment in their native range indicates pre-adaptation of invasive alien plant species. New Phytol 185:1087–1099. doi:10.1111/j.1469-8137.2009.03114.x
Strayer DL (2010) Alien species in fresh waters: ecological effects, interactions with other stressors, and prospects for the future. Freshw Biol 55:152–174. doi:10.1111/j.1365-2427.2009.02380.x
Tashiro JS (1982) Grazing in Bithynia-Tentaculata - age-specific bioenergetic patterns in reproductive partitioning of ingested carbon and nitrogen. Am Midl Nat 107:133–150
Tashiro JS, Colman SD (1982) Filter-feeding in the fresh-water Prosobranch snail Bithynia-Tentaculata - bioenergetic partitioning of ingested carbon and nitrogen. Am Midl Nat 107:114–132
Van der Velde G, Leuven RSEW, Platvoet D, Bacela K, Huijbregts MAJ, Hendriks HWM, Kruijt D (2009) Environmental and morphological factors influencing predatory behaviour by invasive non-indigenous gammaridean species. Biol Invas 11:2043–2054. doi:10.1007/s10530-009-9500-x
van Kleunen M, Dawson W, Schlaepfer D, Jeschke JM, Fischer M (2010) Are invaders different? A conceptual framework of comparative approaches for assessing determinants of invasiveness. Ecol Lett 13(8):947–958. doi:10.1111/j.1461-0248.2010.01503.x
Whitney KD, Gabler CA (2008) Rapid evolution in introduced species, ‘invasive traits’ and recipient communities: challenges for predicting invasive potential. Divers Distrib 14:569–580. doi:10.1111/j.1472-4642.2008.00473.x
Young OR, Berkhout F, Gallopin GC, Janssen MA, Ostrom E, van der Leeuwd S (2006) The globalization of socio-ecological systems: an agenda for scientific research. Glo Env Cha 16:304–316. doi:10.1016/j.gloenvcha.2006.03.004
Acknowledgments
We thank T. Hintze, R. Hölzel and B. Schütze for technical support, and M. Mährlein, C. Sempf and J. Schreiber for help in running the experiments. We thank T. Mehner and the participants of the course on Scientific Writing at IGB for helpful discussion on an earlier draft of this article, S. Wittsack for the sketch of the wave flume and K. Pohlmann for statistical advice. The study was funded by scholarships of the German Federal Environmental Foundation (DBU) and the Foundation Ursula Merz.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Gabel, F., Pusch, M.T., Breyer, P. et al. Differential effect of wave stress on the physiology and behaviour of native versus non-native benthic invertebrates. Biol Invasions 13, 1843–1853 (2011). https://doi.org/10.1007/s10530-011-0003-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10530-011-0003-1