
Abstract
This article presents a novel docking system developed for miniature underwater robots. Recent years have seen an increased diffusion of robots for ocean monitoring, exploration and maintenance of underwater infrastructures. The versatility of those vehicles is extremely affected and limited by energetic constraints and difficulties in updating their mission parameters. Submerged docking stations are a promising solution for providing energy sources and data exchange, thus extending autonomy and mission duration of underwater robots. Furthermore, the docking capability is a novel, but promising approach to enable modularity and reconfigurability in underwater robotics. The authors here propose a hybrid docking system composed of a magnetic alignment unit and a mechanical connection. The former passively aligns and guides the underwater vehicle facilitating a subsequent mechanical connection. The reliability of the system is both analytically investigated and experimentally validated. Finally, the mechanical design of the docking system of two miniature underwater robots is described in detail.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Capabilities of autonomous underwater vehicles (AUVs) and remotely operated vehicles (ROVs) have greatly increased during the past thirty years (Yuh 2000). Originally developed for military operations, they are now commonly used for the exploration of submerged sites, for long-term environmental monitoring, search and localization missions. In fact, during the last decades, progresses in sensing technologies, as well as substantial improvements in materials and on-board computation capabilities have led to the development of sophisticated AUVs with an increasing degree of decision autonomy and versatility. This trend, combined with the increasing operational costs of ROVs, are contributing to the affirmation of AUVs and intervention AUVs (IAUVs) also for deep-sea interventions, such as maintenance, repair and inspection of submerged structures. In fact, any mission performed with ROVs has additional costs associated with a support ship hosting remote operators and a tethered connection between the ROV and the surface.
However, since the versatility of an AUV is conditioned by its autonomy, energy and the data storage limitations become major issues that need to be addressed. Docking stations and homing control techniques are a possible solution to autonomy constraints (Cowen et al. 1997; Inzartsev et al. 2005; Hobson et al. 2007; Krupinski et al. 2008; Maurelli et al. 2009; Park et al. 2009; King et al. 2009; Batista et al. 2012). In fact, a docking station can be an energy source to recharge the internal battery of the AUV and at the same time can be used for exchanging data in order to update mission parameters and objectives and to download the data collected during the mission.
Parallel with the growth of oceanic AUV, another recent trend in underwater robotics is the development of small-scale vehicles having a volume in the order of 10 dm\(^{3}\). This interest is triggered by the potential of miniature AUVs for industrial and research applications. The former usually involve the monitoring of cluttered submerged structures, or the mapping and maintenance of narrow and complex environments such as waterworks and storage compounds. These applications require tailored mechanical designs, as for example the EyeBall ROV (Rustand and Asada 2011) and \(\upmu \)AUV (Watson et al. 2011) that are conceived for the inspection of hazardous environments, substituting human operators. Both of them have a spherical shell and are equipped with multiple propellers in order to move in any direction and perform sharp turns. Another example of miniature AUV is MASUV (Kopman et al. 2012), a robot equipped with a ducted vector thrust with high mobility especially developed to study marine mammals ensuring a safe interaction with them. The interest in small scale AUVs is also driven by the possibility to perform significant but also affordable experiments in confined environments. For example, investigations on underwater robotic swarms can strongly benefit from the availability of small, inexpensive AUVs that can be used to experiment in conventional swimming pools. Investigations in underwater swarm robotics are motivated by the insight that multiple, affordable and agile AUVs could potentially outperform a single, complex and expensive AUV in multiple missions such as: localization of submerged objects, ecological monitoring, mapping of cluttered submerged sites and harvesting resources in underwater habitats. Serafina (Kalantar and Zimmer 2004) paved the way in this field addressing AUVs localization, communication and shoaling of small groups of underwater robots. Co3-AUVs (Simetti et al. 2010) project deals with a swarm of AUVs that can seamlessly monitor critical underwater infrastructures and detect threats or anomalous situations. The recently developed Munsun II (Osterloh et al. 2012) is a small swarm of affordable AUVs for environmental monitoring. CoCoRo (Schmickl et al. 2011; Mintchev et al. 2014) focuses on a large swarm (30–40 AUVs) driven by biologically inspired motion algorithms and self-organization principles that will provide various level of individual and group awareness. Due to the small dimensions of these miniaturized AUVs, the space available for batteries is very limited, therefore the docking capability for battery charging is an almost mandatory feature in order to extend the operational life of the system.
A nearly unexplored topic in underwater robotics is the development of modular and reconfigurable systems. The modular approach offers three main advantages: it ensures versatility, because the features and capabilities (e.g. locomotion, sensing, computation) of a multi-module AUV can be increased with the number of connected robots; it is a fault tolerant approach, thanks to possible redundancy in the modular structure (e.g. possibility to share energy sources or propulsion systems); it makes possible to create a distributed, reconfigurable and movable underwater sensors network. The first studies in this field led to the development of AMOUR (Vasilescu et al. 2005; Dunbabin et al. 2009), a modular underwater robot, which can self-reconfigure by vertically stacking and unstacking modules. These modules are specialized being equipped with different mechatronics systems (e.g. a buoyancy mechanism, propellers, batteries or sensors). Therefore, tailored combinations of multiple modules generate AUVs with different capabilities. To the best of authors’ knowledge the ANGELS project (Mintchev et al. 2012) is the only other example of underwater robot with reconfiguration capability. With respect to AMOUR, ANGELS is composed of a homogenous swarm of independent AUVs that can be reconfigured in serial structures capable of anguilliform swimming. These AUVs are designed to investigate the capabilities of the electric sense (Boyer et al. 2012), a bioinspired perception system commonly used by fish belonging to the family of Gymnotidae and Mormyridae (von der Emde et al. 1998; von der Emde 1999; von der Emde and Fretz 2007). These fish are able to generate an electric field around their body thanks to dedicated emitter organs, named electric organs of discharge (or EODs), which are located in the tail. Dedicated electro-receptors are distributed all over the skin of the fish, providing an instantaneous electrical image of the environment. As a result, the electric fish are able to detect, localize and recognize the shape of the objects in their vicinity. Electric sense is complementary to vision and sonar, as it enables navigation and object identification in muddy water, cluttered environments or when there are particles in suspension. The ANGELS AUVs (Mintchev et al. 2012) can operate either as an eel-like whole entity, or may split into fully autonomous and independent AUVs (and vice-versa). With the former anguilliform morphology, the robot can efficiently swim for long distances, while the latter condition allows a small group of AUVs to spread for a fast and effective investigation of the surroundings.
From the previous analysis, it follows that the docking capability is an essential feature for increasing the energetic autonomy and for enabling the reconfigurability of AUVs. Indeed deep-ocean, small scale as well as modular AUVs can all benefit from reliable and robust docking capabilities.
In this article we present a novel configuration and mechanical design of docking systems conceived for small scale AUVs. Based on the author’s experience on permanent magnets for underwater systems (Stefanini et al. 2012; Manfredi et al. 2013), the authors propose a hybrid docking system based on permanent magnets and mechanical connection. The magnetic interaction passively aligns and guides the AUVs during the approach at a short-range distance (one robot’s body length) from the docking station in order to facilitate a subsequent mechanical connection. The benefits of this hybrid docking are associated to permanent magnets that passively perform part of the “computation” required for guidance and alignment. Therefore the passive alignment reduces the demand for complex homing control techniques and for precise sensors, which are usually required to compute the attitude and distance of the AUV with respect to the docking station.
The article is structured as follows: Section 2 starts with an overview of the docking system and guidance techniques developed so far and describes our main contribution to the field. Section 3 concerns the dynamic simulation implemented to study the feasibility of the passive alignment system based on permanent magnets. Section 4 is devoted to the experimental validation of the simulation using a mock-up AUV. Section 5 presents the case study of two AUVs, ANGELS and CoCoRo shown in Fig. 1, which are both equipped with the proposed docking system. Section 6 concludes with proposals for improvements and future work.

2 Design of docking systems
The proposed docking system is the result of a critical analysis of the mechanisms and working principles developed to connect modular terrestrial robots and to dock underwater vehicles to intervention panels. The docking procedure generally consists of three main steps:
-
Homing phase: The AUV is actively guided toward a fixed docking station or another robot by specific homing algorithms and dedicated sensors (Krupinski et al. 2008). Sensors are used to estimate the position and the orientation of the AUV with respect to the docking station. Sound based systems (e.g. sonar, or acoustic beacon based system like SBL, Ultra SBL, Long BL) have been successfully adopted for the development of multiple homing techniques (Hobson et al. 2007; Kondo et al. 2012; Maki et al. 2013) with ranges of 3,000m or more. Homing techniques are also based on optical guidance algorithms that use light sources on the docking station and photosensitive sensors on the AUV (Cowen et al. 1997; Deltheil et al. 2000; Park et al. 2009; Kondo et al. 2012; Sutantyo et al. 2013). Depending on water turbidity and ambient lighting, optical homing systems have a working range up to 100 m. Magnetic field sensors in the AUV have been exploited in combination with coils in the docking station to develop an electromagnetic guidance system (Feezor et al. 2001) with a range of 25–30 m. Finally, plume-tracking techniques are investigated for both homing techniques (Farrell et al. 2005) and environmental monitoring.
-
Fine alignment phase: It is usually done when the robot is at a short distance from the target, approximately one or two robot’s body lengths. The AUV needs to be aligned within the geometrical tolerance of the docking station. This step can be really challenging especially for underactuated systems as conventional AUVs. The short-range alignment usually exploits optical sensors or cameras (Jin-Yeongand et al. 2007; Krupinski et al. 2008; Maki et al. 2013) combined with dedicated algorithms for fine visual guided servoing manoeuvres.
-
Connection phase: The robot is physically docked to a fixed docking station or to another robot.
The design of a docking system for underwater robots involves several challenges. Firstly, the mechanical connection requires a high precision positioning. Compared to terrestrial applications, underwater docking is more challenging due to the necessity of a 3D alignment that must be usually performed with nonholonomic robots (AUVs are often underactuated). Secondly, modular or reconfigurable robots require the transmission of strong and time dependent forces through the connection mechanism. For example, the ANGELS modules can dock together in a serial morphology capable of anguilliform swimming. In this case, the docking system has to transmit the high torque required to bend the serially connected robot during swimming. Thirdly, especially for modular or reconfigurable robots, the docking system should be clearance-free. Clearance usually causes problems in controlling the robot and can reduce the mechanical life of the system, especially in the case of reversing forces over time. Finally, in case of wired battery charger or data transmission, a waterproof electrical connection is required. In addition to these challenges, the development of docking facilities for miniature AUVs are even more complex. In fact, due to space constraints, several technologies are unavailable off-the-shelf, thus requiring custom design (e.g. sonar).
A large variety of docking systems has been developed over the years for terrestrial modular robots. It is possible to classify the docking systems according to the way in which the connection force is generated. Common connection systems exploit electromagnets, permanent magnets and mechanical devices. As summarized in Table 1, each class of connection systems has particular advantages and drawbacks:
-
electromagnetic connection has the main advantage to passively align robots, exploiting the nature of electromagnetic forces. The system is usually composed of one or several electromagnets that are activated during the connection. The main drawbacks of this solution are weak forces and low energy efficiency, mainly because electrical energy is always required to maintain the connection active. Fracta (Murata et al. 1994) and the robots developed for the Claytronics project (Kirby et al. 2007) use this solution;
-
permanent magnets allow self-alignment as well. The system provides a high-energy efficiency connection because the magnets generate forces without the need for electrical energy. Due to the impossibility of switching these magnets on/off, unlike electromagnets, the main drawback is related to potentially unwanted interactions between the magnets belonging to two separate AUVs. This can affect the behaviour of multiple AUVs in close proximity, especially underwater, since the robots can potentially get stuck together. A first solution to this problem involves the use of ferromagnetic elements combined with a servomotor that controls the orientation of the magnets. In this design, the magnetic field generated by the magnets can be either directed inside the ferromagnetic elements to minimize interactions or redirected outside for docking (Rochat et al. 2010) by modifying the orientation of the magnets. Also, electro-permanent magnets (Gilpin et al. 2010; Marchese et al. 2012) are a possible solution to unwanted interactions. In electro-permanent magnets, the flux redirection is obtained by modifying the magnetization of a low coercive component. Another solution involves suitable magnet size, geometry of the AUV shell and the amount of thrust generated by the propellers in order to minimize the risk or to divert away from unwanted interactions. This approach has the advantage of minimizing design complexity and it is described in detail in Sect. 5.1 for the ANGELS AUV. Another drawback of permanent magnets is related to possible interferences with the sensitive magnetic compasses that are commonly used for underwater navigation. Nevertheless, similarly to unwanted interactions, ferromagnetic elements or electro-permanent magnets can be used to reject almost all the magnetic interferences. In the AUVs presented in the article (see Sect. 5), the authors experienced negligible issues related to unwanted interaction and disturbances on the compass of the AUVs. It’s noteworthy that, when the robots are magnetically docked together, the connection is maintained with no energy consumption. Nevertheless, when the orientation of the magnets is modified, for example to disconnect paired magnets, energy is required. Despite that, permanent magnets remain a highly efficient solution for docking. Miche (Gilpin et al. 2007) and Telecubes (Suhand et al. 2002) are examples of terrestrial modular robots that exploit connection forces generated by permanent magnets.
-
mechanical connection is the most popular system among modular robots. The main advantages are a high versatility and the possibility to transmit strong connection forces. The main disadvantage is the need of high precision positioning and alignment in order to achieve a successful connection. Dedicated sensors and control algorithms have been developed to satisfy these requirements. Mechanical connections are used in terrestrial modular robots like I-cube (Unsal and Khosla 2000), Conro (Khoshnevis et al. 2001), ATRON (Jorgensen et al. 2004) and in the Scout robot (Liedke et al. 2011; Russo et al. 2013).
The mechanical connections are also commonly used to dock AUVs to submerged interventional panels. The systems developed so far are the following (Krupinski et al. 2008; Sotiropoulos et al. 2009):
-
the pole docking, where a non-hovering torpedo-like AUV can grab a vertical rope with a specific clamping mechanism housed in the nose of the robot (Singh et al. 2001);
-
the funnel docking where a conical shaped net is used to guide the entire AUV for a precise short range alignment (Brighenti et al. 2000);
-
the hook docking where the AUV can land on the intervention panel like an airplane on a carrier (Kawasaki et al. 2004);
-
the docking combined with manipulation mainly used by ROVs or IAUVs. For instance robot equipped with robotic arms and grippers can grab specific handle located on the interventional stations (Sotiropoulos et al. 2009).
AMOUR (Vasilescu et al. 2005; Dunbabin et al. 2009), the only example of modular underwater robot, is equipped with a latching mechanism with variable-width diameter that can hold a pin connected to the module which has to be docked.
With respect to the previous classification, for ANGELS and CoCoRo, the authors conceived a hybrid docking system composed of permanent magnets and a mechanical connection. This design allows to exploit the advantages of both the systems and to reciprocally compensate their drawbacks. In fact, permanent magnets guarantee the passive alignment of robots at short distance (approximately one robot’s body length), facilitating afterwards the mechanical connection. Nevertheless, since magnets should be small enough in order to avoid or reduce the probability of unwanted interactions between AUVs swimming in close proximity, the attraction force that they generate could be too weak to ensure a robust connection. For this reason, an additional mechanical docking system is required.
The proposed docking system has two main advantages:
-
to provide to the AUVs a passive guidance and alignment for the subsequent mechanical connection;
-
to generate a wide magnetic attraction region where an AUV has to enter to be passively guided by the magnets for a successful docking. This region has the advantage to extend the level of AUVs misalignment that is tolerated for a successful docking. For example, instead of targeting a small conical indentation in a docking station, a successful docking is ensured also if the AUV enters inside a much wider attraction region. A detailed analysis of the concept of the attraction region is presented in the following section.
Because of these advantages, a hybrid docking system has the potential to reduce both complexity and precision required by the docking control algorithms and sensors. Indeed, part of the “computation and perception” required for guidance and alignment is passively performed by the magnetic interaction.
3 Dynamic simulation of passive alignment
The reliability of the magnetic alignment system to passively provide a successful alignment needs to be quantitatively investigated and experimentally validated. The working principle of this system is based on the so called attraction region, which can be defined as the area where an AUV has to enter in order to be passively guided and aligned for a successful mechanical connection. The shape and the dimension of the attraction region are function of:
-
the characteristics (size, shape and magnetization) of the permanent magnets involved. These characteristics affect the intensity of the magnetic interaction between the systems that need to be docked;
-
the dynamic behaviour of the robot, which is a function of the inertial properties and the shape of the AUV;
-
the geometrical tolerance of the mechanical connection system. This characteristic affects the capability of the mechanical connection to locally compensate for possible AUV misalignments.
Due to the complexity of the problem, the attraction region can be estimated by numerically calculating the trajectory of the AUV under the effect of the magnetic attraction. The case study, that has been considered, concerns the connection between an AUV and a fixed docking station studied in two dimensions. Figure 2 provides schematics of the case study. The following hypotheses have been made:
-
the dynamics of the AUV is studied in the horizontal plane in order to simplify the simulation. Despite this assumption, the proposed model is still valid in describing the docking of an AUV that is kept at a desired depth by means of a buoyancy control system working in closed loop with a pressure sensor;
-
the magnetic interaction is evaluated by approximating the permanent magnets as magnetic dipoles. This simplification is acceptable when magnetic interaction is evaluated at larger distances than the dimensions of the magnets involved in the docking procedure.
-
the fixed docking station is composed of a conical indentation, which acts as a drogue element, while the AUV is equipped with a spiky probe.
The simulation is implemented in Simulink® according to the diagram shown in Fig. 2d. The simulation is composed of three main blocks: AUVs dynamics (Sect. 3.1), magnetic forces computation (Sect. 3.2) and posture verification (Sect. 3.3). The simulation computes the trajectory of the AUV under the effect of the magnetic interaction with the docking station. When the AUV is near the docking station, a dedicated block evaluates the compatibility of the AUVs final posture with the geometrical tolerance of the docking station.

Schematic representation of the docking case study. a The overall docking procedure with a highly misaligned AUV approaching the docking station. b The main parameters of the AUV. c A successful connection with the AUVs probe inside the docking cone. d A block diagram illustrating the implementation of the docking simulation
3.1 Model of the AUV
This section describes the two dimensional dynamics of an AUV. Let {W} be an inertial body frame connected to the docking station and {B} the body-fixed frame with origin in the centre of mass of the vehicle. The vector \(\mathbf{p}=\left[ {\hbox {x, y}} \right] ^{\mathrm{T}}\) is the position of the {B} frame origin with respect to {W} and \(\vartheta \) is the orientation of the AUV relative to {W}. The total velocity of the robot is expressed by the linear term \(\mathbf{v}=\left[ {\hbox {u, v}} \right] ^{\mathrm{T}}\), expressed in the body-fixed frame, and by the angular velocity omega \(\omega \). The 2D AUV kinematics can be written as:
The general dynamics equation of the AUV can be written in the {B} frame as:
where \({\varvec{M}}\) is the mass and inertia matrix, including the contribution of the hydrodynamic added mass/inertia, \({\varvec{C}}\left( \mathbf{v} \right) \) is the Coriolis and centripetal matrix, \({\varvec{D}}\left( \mathbf{v} \right) \) is the hydrodynamic damping matrix (drag and lift forces), \({\varvec{G}}\) is the gravitational and buoyancy force vector and \(\varvec{\tau }\) is the external force and torque input vector (e.g. forces generated by the magnetic interaction and by propellers).
Assuming a decoupling between the degrees of freedom (Ridao et al. 2003), for a movement in a horizontal plane at a fixed depth (2D simulation), the dynamics equation simplifies to:
In detail the mass matrix is composed of two parts:
The first one takes into account the inertial property of the AUV, while the second one is the added mass caused by the interaction with water.
At low speed, the lift and linear drag forces, acting on the AUV, become negligible compared to the quadratic drag forces. Thus the hydrodynamic damping matrix is written as:
where the coefficients depend on the shape of the AUV.
Finally, the external force and torque vector is given by,
“\(a\)” being the major axis of the elliptic shaped AUV.
3.2 Model of the magnetic interactions
A cylindrical permanent magnet with length L and cross area A, can be modelled as a magnetic dipole defined by the vector m with the intensity:
where \(\upmu \) is the magnetic permeability of the water and \(B_0 \) is the magnetic field. The force and torque generated by a dipole \({\varvec{m}}_a \) on \({\varvec{m}}_b\) at a given distance \({\varvec{d}}\) can be written as:
where the hat symbol indicates the associated vector unit.
With respect to Fig. 2a, the magnetic dipoles and their distance are given by:
3.3 Model of the geometrical tolerance in the connection
The docking system is composed of a fixed conical drogue and a probe mounted on the AUV (Fig. 2b, c). The conical drogue has a length l and a height h. Both the conical drogue and the probe have an aperture angle \(\alpha _\mathrm{c}\). The geometry of the system can compensate for position and angular misalignments between the fixed docking station and the AUV. Considering the position (\(x_{T}, y_{T})\) of the tip T of the probe in the world reference frame, it is possible to write the following conservative docking conditions:
both need to be verified when \(\hbox {x}_\mathrm{T}=\mathrm{l}\). The first condition implies that the probe is entering the drogue, the second ensures that the angle between the probe of the AUV and the surface of the drogue is less then \(90^{\circ }\) in order to prevent blocking or jamming.
3.4 Numerical evaluation of passive alignments capability
The dynamic simulation allows to quantitatively evaluate the alignment capability of the permanent magnets given the initial dynamics of the AUV. As shown in Fig. 3, the AUV is assumed to approach the docking station parallel to the X\(_\mathrm{W}\) axis starting from an initial distance where the magnetic interaction can be neglected. The AUV moves at a steady velocity by means of a propulsion force generated by the propeller, which is kept constant during the simulation (no action from the controller is considered). The geometry of the fixed docking drogue can compensate a misalignment along the Y\(_\mathrm{W}\) axis of \(\pm \)h. The simulation aims to evaluate the previously defined attraction region, hence the maximum distance “y” of the AUV from X\(_{W}\) that the magnetic attraction can compensate in order to obtain a successful connection. The simulation is performed considering the data of the CoCoRo AUV that are summarized in Table 2. The results of the simulation are shown in Fig. 3, where the y/h ratio is plotted as a function of the initial steady velocity of the AUV. As expected, the magnetic alignment system increases the misalignment that can be successfully compensated by the docking system. However, the alignment capability is strongly affected by the dynamics (initial steady velocity) of the AUV. Concerning the docking control algorithms and sensors, this example clarifies the capabilities of the proposed system. Without passive alignment, docking algorithms and sensors have to actively and precisely align the AUV within the range of geometrical tolerance accepted by the docking station, in this example \(\pm \)h along the y axis. On the other hand, with the proposed system, control algorithms have only to ensure a constant forward velocity, while sensors are used to verify that the AUV is initially targeting the docking station with a misalignment of \(\pm \)10 h along the y axis. Then, the alignment and guidance procedure is passively performed by the magnetic attraction.

The graph shows the maximum grade of misalignment that can be compensated by the magnetic interaction between stationary magnets in the docking station and in the CoCoRo AUV, which moves at different steady state velocities. The geometric compliance of the conical drogue is \(\pm \)h. Thanks to the passive attraction of the permanent magnets, the docking systems can compensate misalignments 10 times greater than h. The results refer to simulations performed using the data of the CoCoRo AUV
4 Experimental validation
Before implementing the passive alignment system into a working AUV, experimental tests have been performed on a scale mock-up in order to evaluate the reliability of the system and to validate the simulation tool.
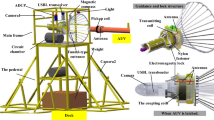
As shown in Fig. 4a–c, the tests involve a small AUV(a) with an ellipsoidal shape (\(50\times 20\times 20\) mm) equipped with a frontal magnet (diameter and length of 4 mm, neodymium N35, axial magnetisation) and a probe. The experimental setup is composed of a frame holding a starting block (c) that helps to position the AUV at a desired distance and orientation with respect to the docking station (b). The AUV is aligned with the starting block thanks to two vertical beams while a third one contains a small magnetic trigger that releases the AUV to start the trials (Fig. 4a). The AUV is kept at a desired depth by a float connected to the vertical beams. The submerged docking station (b) embeds the same magnet as the AUV and a conical drogue (aperture angle \(90^{\circ }\)) where the probe can enter.

Experimental setup (a–c) used to validate the reliability of the permanent magnet alignment system. a AUV mock-up, b docking station, c starting block. The graphs (d–f) show a comparison between the simulated trajectories and four examples of trajectories measured during the experiments. All the trials were recorded with a webcam (Microsoft®, wide angle F/2.0, 720pHD, 30fps) and subsequently analysed with ProAnalyst® in order to extrapolate the docking trajectories
The tests were performed in still water. The AUV was positioned at a distance p of 85 mm (1.7 AUV body length) aligned with the docking station and was released with almost zero velocity. The tests were performed with values of \(\uptheta \) equal to \(30^{\circ }, 60^{\circ }\) and \(90^{\circ }\) and for each angle the trials were repeated 10 times. The tests were recorded with a webcam (Microsoft®, wide angle F/2.0, 720pHD, 30fps) placed above the experimental setup. The videos were subsequently analysed with ProAnalyst® in order to extrapolate the docking trajectories and make a comparison with those predicted in simulation. As shown in Fig. 4d–f, the experimental results match the predicted trajectory despite some initial perturbations in the velocity of the AUV occurred during the release process. For each value of \(\uptheta \), Table 3 reports two values: the maximum deviation between simulated and experimental trajectory normalized with the length of the theoretical trajectory, and the percentage of docking success over the ten trials. The former data is computed by dividing the maximum distance between the theoretical and the experimental trajectories with the total length of the theoretical trajectory. It is possible to notice that for \(\uptheta \) equal to \(30^{\circ }\) and \(60^{\circ }\), the percentage of success is 100 %. However, when \(\uptheta \) is equal to \(90^{\circ }\), the percentage of success decreases because the alignment system is not able to fully compensate the initial velocity perturbation occurred during the release process. This is mainly due to the fact that in this configuration the docking station has less capability to attract the AUV toward the docking cone. According to the success rate, a good approximation of the attraction region is a half circle with a range of 6 cm (Fig. 4c).
5 Two case studies
The following sections are devoted to the analysis of two case studies: the design of an inter-modules docking system for ANGELS and the development of a docking system to connect the CoCoRo AUV to a submerged station to recharge its batteries.
5.1 The case study of ANGELS
The ANGELS robotic system is composed of nine AUVs that are capable of moving independently or can be linked together in a serial whole entity that can swim like an eel (Mintchev et al. 2012). These two morphologies have a complementary purpose: single agents can spread in the environment thus increasing the effectiveness of localization missions (e.g. chemical plume tracing, black boxes localization), while the serial morphology can adopt and anguilliform locomotion mode to swim efficiently and cover long distances. In addition, because of its longer length, the serial morphology has an extended perception range of the electric sense compared to the single AUV. Indeed, as reported in Servagent et al. (2013), the electric sensors developed for the ANGELS have the capability to detect objects up to distance of the order of one robot’s body-length. As described in the previous section, the docking system is hybrid and is composed of an alignment system with permanent magnets and a screw mechanism that mechanically connect together multiple AUVs providing the inter module forces and torques required during the anguilliform swimming. The design of the docking system is illustrated in Fig. 5.

The figure is composed of a 3D view of the ANGELS AUV (a) and two sections (b and c) showing the main components constituting the docking system. The magnetic alignment system is composed of two magnets (a, b) and a DC motor (c). The mechanical connection system is composed of: two screws (\(d_{1}\), \(d_{2})\), pivoting connectors (\(e_{1}\), \(e_{2})\), DC motor (f), transmission shaft (g), bevel gears (h), magnetic coupling (i), spheres (j), bolts (k), magnets (l). The upper screw \(d_{1}\) has the same drive system shown in (b) for the lower screw \(d_{2}\)
The alignment system is composed of two cylindrical magnets with diametrical magnetization housed in the stern (a) and in the bow (b) of the AUV. Both magnets are cylindrical with a diameter of 6 mm, a height of 5 mm and are made of neodymium N35. A dedicated DC motor (c) can rotate the rear magnet (around the dotted line showed in Fig. 5b) in order to switch from the attraction to the repulsive configuration. When the robots need to be docked, the rear magnet (a) is oriented in an attractive configuration with respect to the frontal magnets (b) that are embedded in all AUVs. During undocking and single agent operations, the movable magnet is turned by \(180^{\circ }\) in a repulsive configuration (as shown in Fig. 5a). In this condition, two connected AUVs detaches driven by a magnetic repulsive force with no contribution from the propellers. The DC motor requires energy in order to modify the orientation of the magnets. However, when the magnets reach the desired configuration (i.e. attractive for docking or repulsive for undocking), the DC motor is stopped and its non-backdrivability preserves the orientation of the magnets. Hence, the alignment process between AUVs is performed passively without energy consumption.
The size of the magnets is a trade-off between two requirements: a high attraction force to facilitate alignment before docking, and a reduction of unwanted interactions when multiple AUVs swim in close proximity. In this situation, the risk is that the AUVs come close and potentially get stuck together. The problem of unwanted interaction can be studied considering two AUVs that are in contact together as shown in Fig. 6a. The magnets are in the undocking configuration (repelling each other as shown in Fig. 5a) and the angles \(\upalpha \) and \(\upbeta \) (both included between \(-90^{\circ }\) and \(+90^{\circ }\)) define all the possible relative orientations of the two AUVs. The magnetic force and torque between the AUVs can be evaluated according to the equations reported in Sect. 3.2. The normal force \(F_{norm} \) and the torque \(T\) mainly contribute to the relative rotation of the two AUVs, thus their effect is already considered in the orientation range described by the angles \(\upalpha \) and \(\upbeta \). Figure 6b shows the region (in a \(\upalpha -\upbeta \) plane) where the value of the parallel force \(F_{par} \) is negative. The areas of major interest are the ones close to the origin of the plot where the absolute value of the attraction force is high and the AUVs can potentially become stuck together. In these regions, the attraction force reaches a maximum absolute value of 0.25 N. Nevertheless, since the propellers can generate a thrust of 0.8 N, it is always possible to divert away from these unsafe configurations. In conclusion, a combination of magnets size, geometry of the AUVs shell and propellers thrust allows to minimize the risk and to divert away from possible unwanted interactions between AUVs.

2D study of the problem of unwanted interaction between two AUVs close to each other. a Schematic of two ANGELS AUVs in contact with each other. All the possible relative orientations can be described by the angles \(\upalpha \) and \(\upbeta \) in the range \(\pm 90^{\circ }\). The magnets used during docking are represented by their magnetization vectors \(\overrightarrow{M}_{a}\) and \(\overrightarrow{M}_b\). The magnetic interaction is described by the force vector \(\overrightarrow{F}\) and the torque \(\overrightarrow{T}\) acting on the right AUV. b Density plot showing the region where the intensity of \(F_{par} \) is negative. The colour goes from blue to red when the absolute value of \(F_{par} \) increases
Two main constraints have to be respected for the design of the mechanical connection system:
-
non-electrically conductive components have to be in contact with water in order to avoid interferences with the conductivity measurements required by the electric sense;
-
no clearance between the AUVs is admitted when they are connected in order to prevent control issues and mechanical life reduction of the docking mechanisms, especially during swimming in the case of reversing forces over time.
Among several mechanical connection systems, like hooks and pins, screws perfectly match the previous constraints. For example, nylon screws avoid introducing metal in contact with water and they are strong enough to transmit the required forces (up to 30 N) and torque (up to 3 Nm). In addition, clearance can be avoided by tightening up the screws.
The real shell houses two screws (d\(_{1}\), d\(_{2})\), which tighten up two pivoting connectors (e\(_{1}\), e\(_{2})\) in the frontal part of the AUV that needs to be docked. The upper connector (e\(_{1})\) is free to rotate, while the lower one (e\(_{2})\) is connected to a brushless motor that controls the oscillatory movement required during the anguilliform swimming. Figure 5b illustrates the drive mechanisms for the lower screw d\(_{2}\), which is identical for the upper screw d\(_{1}\). A DC motor (f) with torque control tightens up each screw providing the desired connection strength. The motion is transmitted from the DC motor to an internal shaft (g) by means of two bevel gears (h). A pair of brass bearings supports the internal shaft. The torque is transmitted to the external screw by means of a magnetic coupling (i) composed of a wet and dry part that are separated by a thin polymeric disk. Each half of the magnetic coupling holds six permanent magnets (diameter and height of 3 mm made of neodymium N35) arranged in a circular pattern with alternate magnetization. The magnetic coupling behaves like a non-linear torsional spring with a maximum transmittable torque of 3.93 Nmm. In each part of the magnetic coupling, there is a nylon sphere that pivots (spin, rolls) on the thin polymeric disk, thus reducing the friction caused by the attraction force between the magnets. This design allows transmitting the torque from the inside of the module to the outer screw without any mechanical connection, ensuring the shell is completely waterproof. Finally, a custom axial bearing using nylon spheres (j) is integrated with the screw in order to reduce stick-slip effects during the first stage of unscrewing. Driven by the magnetic interaction and facilitated by conical indentations, the screws of one AUV (d\(_{1}\), d\(_{2})\) enter inside the connectors (e\(_{1}\), e\(_{2})\) of the other AUV that is involved in the docking process. The two connectors (e\(_{1}\), e\(_{2})\) have axially compliant bolts (k) thanks to two facing magnets (l) in repulsive configuration that act like springs (Fig. 5c). Driven by the inter-module magnetic attraction force, the two screws enter inside the connectors while the bolts are pushed back until the connectors (e\(_{1}\), e\(_{2})\) mate the rear part of the other AUV. At this point, the screws are sufficiently aligned with the bolts to start the mechanical connection process. After, the screws start to rotate and the two bolts are engaged and gradually tightened ensuring a strong and almost zero clearance connection. This procedure and the compliance of the bolts allow minimizing misalignments during the screwing process, thus preventing possible damages due to threads stripping.
As described at the beginning of Sect. 2, the docking procedure comprises three main steps. During the first phase, one AUV is driven toward the other by actively controlling its propellers using the feedback from the electric sense. As described in Mintchev et al. (2012), the strategy used takes inspiration from “electric” fish (Shieh et al. 1996), which are able to swim towards an active dipole by following the lines of the electric field. This navigation procedure can be implemented using a “line following algorithm” (Boyer and Lebastard 2012; Boyer et al. 2013) that steers the AUV (\(\upomega \) velocity) by minimizing the difference between the current measured by the left and the right electrodes (I\(_\mathrm{left}\), I\(_\mathrm{right})\), while maintaining a constant forward velocity V (parallel to the AUV length):
As shown in Fig. 7a, b, by applying this reactive control law, the head of a passive module (capable of measuring only) comes along the electric lines up to touch the emitters of an active module (the one generating the electric field). The main advantage is the omnidirectionality of the electric fields that allows the docking of robots with a generic orientation and approaching trajectory. The main drawback is the short guidance range provided by the electric sense. The second step of docking (Fig. 7c) begins when the passive AUV reaches the attraction region (generated by the magnet of the active AUV), and is passively aligned and guided toward the active module. Finally, during the last step, the two AUVs are tightly connected together by the two docking screws (Fig. 7d).

The figures show the main steps of the docking procedure. An active AUV behaves like an electric dipole generating an electric field that is perceived by a passive one (a). The latter starts to move up to the active emitting electrodes (b). The passive AUV reaches the attraction region of the active one, it is passively aligned (c) and finally docked (d)
The two final steps are shown in Fig. 8, which is composed of four snapshots taken from a video of a docking test. The right AUV is placed in the attraction region of the left module, figure Fig. 8a. The misalignment angle is roughly \(20^{\circ }\). When the magnetic connection is activated, the modules start to align (Fig. 8b) until the two screws (d\(_{1}\) and d\(_{2})\) penetrate into the connectors (e\(_{1}\) and e\(_{2})\) Fig. 8c. Finally the modules can be connected by tightening up the two screws Fig. 8d.

Four snapshots from a docking test between two ANGELS AUVs. The robots are passively guided using the magnetic interaction (a–c) and subsequently connected with the screws (d)
5.2 The case study of CoCoRo
The CoCoRo project aims to develop a swarm of miniature AUVs with cognitive capabilities. Due to its small dimensions (\(250\times 120\times 50\) mm), the robot can carry a battery pack that ensures a maximum autonomy of 120 min (Mintchev et al. 2014). In order to perform extended operations, the AUVs can cooperate with a floating station containing a reservoir of energy that can be refilled by harvesting energy from the environment (e.g. solar, wind or wave energy). An underwater charging station, connected to the floating base, has been designed in order to dock the AUV and recharge its battery pack. Furthermore the station is equipped with a light-based communication system for exchanging information with a docked AUV.
The design of the docking station is illustrated in Fig. 9. It is composed of a waterproof housing (a) that contains a rotating magnet (b) and a DC motor (c). The magnet is diametrically magnetized and it can be oriented by the DC motor. When an AUV needs to be docked, the magnet is oriented in an attractive configuration with respect to the magnets that are located in the AUVs nose (e). When recharging is completed, the magnet in the docking station is rotated \(180^{\circ }\), repulsive force is generated and the AUV disengages with no contribution from the propellers.

The figure shows the 3D models of the docking systems developed for CoCoRo. a The underwater docking station with communication and battery charging capabilities. b The nose of the CoCoRo AUVs with the permanent magnet for alignment and the electric connectors for underwater battery charging. c A transversal section of the charging station in order to highlight the movable magnet used during docking. d A detailed longitudinal section of the electric connectors used to transfer energy
Since the main purpose of the charging station is to transfer energy from the floating base to the battery of the AUV, a custom energy transmission system has been conceived. An energy transmission system can be wired (Arvin et al. 2009; Rubenstein et al. 2012) or wireless exploiting inductive coupling (McGinnis et al. 2007; Howe and Chao 2010; Assaf et al. 2013). The two systems are complementary: the former has a high efficiency transmission (almost 100 % since there is a direct electrical connection between the AUV and the floating station) while the latter covers efficiency range from 20 to 80 % depending on the adopted technology. A wired connection requires a precise docking and a sealing for the electrical connectors. On the contrary, a wireless system does not require precise and waterproof electrical connections. Moreover, a wireless system needs dedicated electronic boards to modulate and demodulate the electric current. Finally, depending on the technology used, wireless systems have usually a lower power transmission rate thus increasing the time required to fully charge an AUV.
Since energetic efficiency and charging time are major requirements in autonomous robots in order to increase the operational activity, a wired energy transmission system has been chosen. The requirements of a precise alignment and a waterproof connection are addressed with a tailored design of the docking system. In practice, the former requirements are fulfilled by permanent magnets that passively orient the AUV toward the docking station. With reference to Fig. 9, a probe (f) and drogue (g) system provides the final and precise positioning that is required for a successful electrical connection. The charging station is equipped with two electrical connectors (h\(_{1}\) and h\(_{2})\) that are inserted inside a “floating” frame (i). The frame is connected with cables (not shown in Fig. 9) to the charging station in order to passively compensate for possible oscillations caused by waves. This solution demonstrates high stability in a swimming pool with simulated waves. Nevertheless, to cope with more demanding conditions, two possible solutions can be implemented: an active stabilization system can be added to the charging station; or, similarly to ANGELS, a mechanical docking unit that ensures a strong and stable connection between the charging station and the AUV. The design of the electrical connectors is shown in Fig. 9d. An electrical wire is soldered to a spring contact (j) that is housed into an insulating case (k). At the end of the housing there is a silicone seal (l) that ensures a waterproof connection thanks to the attraction force generated by the ring magnets (m) inside the connectors and those located in the nose (n) of the CoCoRo AUVs.
Presently, each CoCoRo AUV is equipped with a battery pack composed of eight 880 mAh LiPo cells connected in parallel. A 80 % charge cycle takes from 0.8 to 1.2 h with a safe charging rate. A full charge cycle takes from 1.5 to 2 h. In future work the authors will address the scalability of the charging process for the larger AUVs adopted in oceanic mission. Nevertheless, it is interesting to point out that a tethered charging system is one of the best solutions in terms of time efficient. To reduce time to almost zero, exchangeable batteries packs (Vaussard et al. 2013) are a promising solution although difficult to be implemented in an underwater environment.
An example of docking performed with the CoCoRo AUV is shown in Fig. 10. The AUV is released in still water with initial velocities of V\(_\mathrm{x}=-7.6\) mm/s and V\(_\mathrm{y}=1.5\) mm/s with a misalignment along the y axis of 37 mm. The geometrical tolerance of the docking system can compensate for an axial misalignment of \(\pm \)7.5 mm. As shown in Fig. 10, the magnets passively compensate the AUV initial misalignment thus ensuring a successful connection to the docking station.

Test of the docking system using a CoCoRo AUV. The AUV is launched toward the docking station with a misalignment of 37 mm along the y axis. The level of misalignment is higher then what can be tolerated by the docking station (\(\pm \)7.5 mm). After the launch, the AUV is passively guided by the permanent magnets. a A screenshot of the test, the green points are a tracking of the nose position of the AUV. b A comparison between the experimental trajectory and the one numerically simulated. The trials were recorded with a webcam (Microsoft®, wide angle F/2.0, 720pHD, 30fps) and subsequently analysed with ProAnalyst® in order to extrapolate the docking trajectories
6 Conclusions
The article introduces a novel hybrid docking system for miniature underwater robots. The system is composed of a passive alignment system and a mechanical connection. The former is based on permanent magnets that passively guides and directs the AUV for the subsequent mechanical connection. The novelty of this approach is twofold: permanent magnets generate an attraction region that extends the level of initial AUV misalignment that is tolerated for a successful connection and passively guides the AUV toward the docking station. As a direct consequence, the magnetic interaction performs part of the “computation” required for guidance and alignment thus reducing the complexity and the precision needed by control algorithms and sensors. Indeed, algorithms and sensors do not need to precisely target the area of a conical indentation in a docking station, but can simply target a much larger attraction region and let the magnets passively guide the AUV toward a successful docking. The effectiveness of the passive guidance provided by the magnetic interaction has been studied and experimentally validated with a numerical simulation of the AUV dynamics under the effect of magnetic attraction forces. Experimental tests with a mock-up show a good match with the results predicted by the simulation.
The effectiveness of the proposed hybrid docking system has been successfully proven by two miniature AUVs: in the ANGELS robotic platform, the docking system allows the connection of the robots in an eel-like morphology, while in the CoCoRo AUVs it enables the connection with an underwater station for battery charging and updating of mission parameters.
In the future, the authors will extend the dynamic simulator considering 3D trajectories and possible external perturbations (e.g. stream, oscillations of the docking station due to waves). Furthermore the authors will develop tailored docking algorithms that will guide the AUV inside the magnetic attraction region in order to take advantage from the passive alignment provided by the magnets. Initial tests have been performed using optical guidance for the ANGELS AUVs (Sutantyo et al. 2013), while guidance with electric sense is currently under investigation. Finally, although the reliability of the system has been validated for miniature AUVs, its feasibility and necessary adjustments (e.g. size of the magnets, steel screws for higher connection strength) on larger scale need to be investigated further.
References
Arvin, F., Samsudin, K., & Ramli, A. R. (2009). Swarm robots long term autonomy using moveable charger. In ICFCC 2009. International Conference on Future Computer and Communication, 2009, 3–5 April 2009 (pp. 127–130).
Assaf, T., Stefanini, C., & Dario, P. (2013). Autonomous underwater biorobots: A wireless system for power transfer. Robotics & Automation Magazine, 20(3), 26–32.
Batista, P., Silvestre, C., & Oliveira, P. (2012). A two-step control strategy for docking of autonomous underwater vehicles. In American Control Conference (ACC) 2012, 27–29 June 2012 (pp. 5395–5400).
Boyer, F., & Lebastard, V. (2012). Exploration of objects by an underwater robot with electric sense. Living machines. In T. J. Prescott, N. F. Lepora, A. Mura, & P. F. M. J. Verschur (Eds.), Biomimetic and biohybrid systems. Lecture notes in computer science. Berlin: Springer.
Boyer, F., Gossiaux, P. B., Jawad, B., Lebastard, V., & Porez, M. (2012). Model for a sensor inspired by electric fish. IEEE Transactions on Robotics, 28(2), 492–505.
Boyer, F., Lebastard, V., Chevallereau, C., & Servagent, N. (2013). Underwater reflex navigation in confined environment based on electric sense. IEEE Transactions on Robotics, 29(4), 945–956.
Brighenti, A., Zugno, L., Mattiuzzo, F., & Sperandio, A. (2000). EURODOCKER a universal docking-downloading recharging system for AUVs: Conceptual design results. In OCEANS ’98 Conference Proceedings, 28 Sep–1 Oct 1998 (Vol. 3, pp. 1463–1467).
Cowen, S., Briest, S., & Dombrowski, J. (1997). Underwater docking of autonomous undersea vehicles using optical terminal guidance. In OCEANS ’97. MTS/IEEE Conference Proceedings, 6–9 Oct 1997 (Vol. 2, pp. 1143–1147).
Deltheil, C., Didier, L., Hospital, E., & Brutzman, D. P. (2000). Simulating an optical guidance system for the recovery of an unmanned underwater vehicle. IEEE Journal of Oceanic Engineering, 25(4), 568–574.
Dunbabin, M., Corke, P., Vasilescu, I., & Rus, D. (2009). Experiments with cooperative control of underwater robot. International Journal of Robotics Research, 28, 815–833.
Farrell, J. A., Pang, S., & Li, W. (2005). Chemical plume tracing via an autonomous underwater vehicle. IEEE Journal of Oceanic Engineering, 30(2), 428–442.
Feezor, M. D., Sorrell, F. Y., Blankinship, P. R., & Bellingham, J. G. (2001). Autonomous underwater vehicle homing/docking via electromagnetic guidance. IEEE Journal of Oceanic Engineering, 26(4), 515–521.
Gilpin, K., Knaian, A., & Rus, D. (2010). Robot pebbles: One centimeter modules for programmable matter through self-disassembly. In IEEE International Conference on Robotics and Automation (ICRA), 2010, 3–7 May 2010 (pp. 2485–2492).
Gilpin, K., Kotay, K., & Rus, D. (2007). Miche: Modular shape formation by self-dissasembly. In IEEE International Conference on Robotics and Automation, 2007, 10–14 April 2007 (pp. 2241–2247).
Hobson, B. W., McEwen, R. S., Erickson, J., Hoover, T., McBride, L., Shane, F., & Bellingham, J. G. (2007). The development and ocean testing of an AUV Docking Station for a 21” AUV. In OCEANS 2007, Sept 29–Oct 4 2007 (pp. 1–6).
Howe, B. M., & Chao, Yi. (2010). A smart sensor web for ocean observation: Fixed and mobile platforms, integrated acoustics, satellites and predictive modeling. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 3(4), 507–521.
Inzartsev, A. V., Matvienko, Y. V., Pavin, A. M., Vaulin, Y. V., & Scherbatyuk, A. P. (2005). Investigation of autonomous docking system elements for long term AUV. In OCEANS, 2005. Proceedings of MTS/IEEE (Vol. 1, pp. 388–393).
Jin-Yeongand, P., Bong-Huanand, J., Pan-Mookand, L., Fill-Youband, L., & Jun-ho, O. (2007). Experiment on underwater docking of an autonomous underwater vehicle ‘ISiMI’ using optical terminal guidance. In OCEANS 2007—Europe, 18–21 June 2007 (pp. 1–6).
Jorgensen, M. W., Ostergaard, E. H., & Lund, H. H. (2004). Modular ATRON: Modules for a self-reconfigurable robot. In IROS 2004 Proceedings. 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2004, 28 Sept–2 Oct 2004 (Vol. 2, pp. 2068–2073).
Kalantar, S., & Zimmer, U. R. (2004). Contour shaped formation control for autonomous underwater vehicles using canonical shape descriptors and deformable models. In OCEANS ’04. MTTS/IEEE TECHNO-OCEAN ’04, 9–12 Nov 2004 (Vol. 1, pp. 296–307).
Kawasaki, T., Noguchi, T., Fukasawa, T., Hayashi, S., Shibata, Y., Limori, T., Okaya, N., Fukui, K., & Kinoshita, M. (2004). Marine Bird, a new experimental AUV—Results of docking and electric power supply tests in sea trials. In OCEANS ’04. MTTS/IEEE TECHNO-OCEAN ’04, 9–12 Nov. 2004 (Vol. 3, pp. 1738–1744).
Khoshnevis, B., Kovac, R., Shen, W.-M., & Will, P. (2001). Reconnectable joints for self-reconfigurable robots. In Proceedings. 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2001 (Vol. 1, pp. 584–589).
King, P., Lewis, R., Mouland, D., & Walker, D. (2009). CATCHY an AUV ice dock. In OCEANS 2009, MTS/IEEE Biloxi-Marine Technology for Our Future: Global and Local Challenges, 26–29 Oct 2009 (pp. 1–6).
Kirby, B. T., Aksak, B., Campbell, J. D., Hoburg, J. F., Mowry, T. C., Pillai, P., & Goldstein, S. C. (2007). A modular robotic system using magnetic force effectors. In IROS 2007. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2007, Oct 29–Nov 2 2007 (pp. 2787–2793).
Kondo, H., Okayama, K., Choi, J.-K., Hotta, T., Kondo, M., Okazaki, T., Singh, H., Chao, Z., Nitadori, K., Igarashi, M., & Fukuchi, T. (2012). Passive acoustic and optical guidance for underwater vehicles. In OCEANS, 2012—Yeosu, May 2012 (pp. 1, 6, 21–24).
Kopman, V., Cavaliere, N., & Porfiri, M. (2012). Masuv-1: A miniature underwater vehicle with multidirectional thrust vectoring for safe animal interactions. IEEE/ASME Transactions on Mechatronics, 17(3), 563–571.
Krupinski, S., Maurelli, F., Grenon, G., & Petillot, Y. (2008). Investigation of autonomous docking strategies for robotic operation on intervention panels. In OCEANS 2008, 15–18 Sept 2008 (pp. 1–10).
Liedke, J., & Wörn, H. (2011). CoBoLD—A bonding mechanism for modular self-reconfigurable mobile robots. In 2011 IEEE International Conference on Robotics and Biomimetics, ROBIO 2011 (Art. no. 6181589, pp. 2025–2030).
Maki, T., Shiroku, R. T., Sato, Y., Matsuda, T., Sakamaki, T., & Ura, T. (2013). Docking method for hovering type AUVs by acoustic and visual positioning. In Underwater Technology Symposium (UT), 2013 IEEE International, 5–8 March 2013 (pp. 1–6).
Manfredi, L., Assaf, T., Mintchev, S., Marrazza, S., Capantini, L., Orofino, S., et al. (2013). A bioinspired autonomous swimming robot as a tool for studying goal-directed locomotion. Biological Cybernetics, 107(5), 513–527.
Marchese, A. D., Asada, H., & Rus, D. (2012). Controlling the locomotion of a separated inner robot from an outer robot using electropermanent magnets. In IEEE International Conference on Robotics and Automation (ICRA), 2012 (pp. 3763–3770).
Maurelli, F., Petillot, Y., Mallios, A., Krupinski, S., Haraksim, R., & Sotiropoulos, P. (2009) Investigation of portability of space docking techniques for autonomous underwater docking. In OCEANS 2009—EUROPE, 11–14 May 2009 (pp. 1–9).
McGinnis, T., Henze, C. P., & Conroy, K. (2007). Inductive power system for autonomous underwater vehicles. In OCEANS 2007, Sept 29–Oct 4 2007 (pp. 1–5).
Mintchev, S., Donati, E., Marrazza, S., & Stefanini, C. (2014). Mechatronic design of a miniature underwater robot for swarm operations. In IEEE International Conference on Robotics and Automation (ICRA), 2014, 31 May–7 June 2014 (pp. 2938–2943).
Mintchev, S., Stefanini, C., Girin, A., Marrazza, S., Orofino, S., Lebastard, V., Manfredi, L., Dario, P., & Boyer, F. (2012). An underwater reconfigurable robot with bioinspired electric sense. In IEEE International Conference on Robotics and Automation (ICRA), 2012, 14–18 May 2012 (pp. 1149–1154).
Murata, S., Kurokawa, H., & Kokaji, S. (1994). Self-assembling machine. In IEEE International Conference on Robotics and Automation, 1994, 8–13 May 1994 (Vol. 1, pp. 441–448).
Osterloh, C., Pionteck, T., & Maehle, E. (2012). MONSUN II: A small and inexpensive AUV for underwater swarms. In Proceedings of ROBOTIK 2012; 7th German Conference on Robotics, 21–22 May 2012 (pp. 1–6).
Park, J., Jun, B., Lee, P., & Oh, J. (2009). Experiments on vision guided docking of an autonomous underwater vehicle using one camera. Ocean Engineering, 36(1), 48–61. ISSN 0029–8018.
Ridao, P., Batlle, J., & Carreras, M. J. (2003). Model identification of a low-speed UUV. In Proceedings of the 1st IFAC Workshop on Guidance and Control of Underwater Vehicles, Glasgow, Scotland, UK, April 2003 (pp. 47–52).
Rochat, F., Schoeneich, P., Bonani, M., Magnenat, S., Hürzeler, C., Mondada, F., & Bleuler, H. (2010). Design of magnetic switchable device (MSD) and applications in climbing robot. In Proceedings of the 13th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR 2010), Nagoya, Japan.
Rubenstein, M., Ahler, C., & Nagpal, R. (2012). Kilobot: A low cost scalable robot system for collective behaviors. In IEEE International Conference on Robotics and Automation (ICRA), 2012, 14–18 May 2012 (pp. 3293–3298).
Russo, S., Harada, K., Ranzani, T., Manfredi, L., Stefanini, C., Menciassi, A., et al. (2013). Design of a robotic module for autonomous exploration and multimode locomotion. IEEE/ASME Transactions on Mechatronics, 18(6), 1757–1766.
Rustand, I., & Asada, H. (2011). The eyeball ROV: Design and control of a spherical underwater vehicle steered by an internal eccentric mass. In IEEE International Conference on Robotics and Automation (ICRA), 2011, May 2011 (pp. 5855–5862).
Schmickl, T., Thenius, R., Moslinger, C., Timmis, J., Tyrrell, A., Read, M., Hilder, J., Halloy, J., Campo, A., Stefanini, C., Manfredi, L., Orofino, S., Kernbach, S., Dipper, T., & Sutantyo, D., (2011). Cocoro–The self-aware underwater swarm. In Fifth IEEE Conference on Self-Adaptive and Self-Organizing Systems Workshops (SASOW), 2011, Oct 2011 (pp. 120–126).
Servagent, N., Jawad, B., Bouvier, S., Boyer, F., Girin, A., Gomez, F., et al. (2013). Electrolocation sensors in conducting water bio-inspired by electric fish. IEEE Sensors Journal, 13(5), 1865–1882. Art. no. 6415238.
Shieh, K. T., Wilson, W., Winslow, M., McBride, D. W., & Hopkins, C. D. (1996). Short-range orientation in electric fish—An experimental study of passive electrolocation. Journal of Experimental Biology, 199, 2383–2393.
Simetti, E., Turetta, A., Casalino, G., & Cresta, M. (2010). Towards the use of a team of USVs for civilian harbour protection: The problem of intercepting detected menaces. OCEANS 2010 IEEE—Sydney, 24–27 May 2010 (pp. 1–7).
Singh, H., Bellingham, J. G., Hover, F., Lemer, S., Moran, B. A., von der Heydt, K., et al. (2001). Docking for an autonomous ocean sampling network. IEEE Journal of Oceanic Engineering, 26(4), 498–514.
Sotiropoulos, P., Grosset, D., Giannopoulos, G., & Casadei, F. (2009). AUV docking system for existing underwater control panel. In OCEANS 2009—EUROPE, 11–14 May 2009 (pp. 1–5).
Stefanini, C., Orofino, S., Manfredi, L., Mintchev, S., Marrazza, S., Assaf, T., et al. (2012). A novel autonomous, bioinspired swimming robot developed by neuroscientists and bioengineers. Bioinspiration & Biomimetics, 7(2), 025001.
Suhand, J. W., Homansand, S. B., & Yim, M. (2002). Telecubes: Mechanical design of a module for self-reconfigurable robotics. In Proceedings. ICRA ’02. IEEE International Conference on Robotics and Automation, 2002 (Vol. 4, pp. 4095–4101).
Sutantyo, D., Buntoro, D., Levi, P., Mintchev, S., & Stefanini, C. (2013). Optical-guided autonomous docking method for underwater reconfigurable robot. In IEEE International Conference on Technologies for Practical Robot Applications (TePRA), 2013, 22–23 April 2013 (pp. 1–6).
Unsal, C., & Khosla, P. K. (2000). Mechatronic design of a modular self-reconfiguring robotic system. In Proceedings. ICRA ’00. IEEE International Conference on Robotics and Automation (Vol. 2, pp. 1742–1747).
Vasilescu, I., Varshavskaya, P., Kotay, K., & Rus, D. (2005). Autonomous modular optical underwater robot (AMOUR) design, prototype and feasibility study. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, 2005. ICRA 2005, 18–22 April 2005 (pp. 1603–1609).
Vaussard, F., Rétornaz, P., Roelofsen, S., Bonani, M., Rey, F., & Mondada, F. (2013). Towards long-term collective experiments. Advances in Intelligent Systems and Computing, 194(2), 683–692.
von der Emde, G. (1999). Active electrolocation of objects in weakly electric fish. Journal of Experimental Biology, 202, 1205–1215.
von der Emde, G., & Fretz, S. (2007). Distance, shape and more: recognition of object features during active electrolocation in a weakly electric fish. Journal of Experimental Biology, 210(17), 3082–3095.
von der Emde, G., Schwarz, S., & Gomez, L. (1998). Electric fish measure distance in the dark. Nature, 395, 890–894.
Watson, S., Crutchley, D., & Green, P. (2011). The design and technical challenges of a micro-autonomous underwater vehicle. In International Conference on Mechatronics and Automation (ICMA), 2011, Aug 2011 (pp. 567–572).
Yuh, J. (2000). Design and control of autonomous underwater robots: A survey. Journal Autonomous Robots, 8(1), 7–24.
Acknowledgments
The activity presented in this article was supported by the European Commission within the framework of the ANGELS Project (Project Reference 231845) and the CoCoRo Project (Project Reference 270382). The authors would like to thank Mr. Godfried Jansen van Vuuren for his technical support.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mintchev, S., Ranzani, R., Fabiani, F. et al. Towards docking for small scale underwater robots. Auton Robot 38, 283–299 (2015). https://doi.org/10.1007/s10514-014-9410-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10514-014-9410-3