
Abstract
Few anatomical criteria have been proposed to distinguish bird tracks from dinosaur tracks. The most commonly used criterion is the angle of divarication between toes II and IV, which is usually greater in birds than dinosaurs. The angle of divarication as related to some skeletal feature in modern birds may provide additional information about the trackmaker and its evolutionary relationships. A total of 186 bird tarsometatarsi (11 orders, 21 families, 39 genera, 41 species) from 8 morphotypes—shorebirds, wading birds, perching birds, zygodactyl birds, birds of prey, ground foragers, webbed-footed birds, and syndactyl birds—were sampled to test the hypothesis that the morphology of the distal end of the tarsometatarsus is the primary influence on the angle of divarication of the toes. Skeletal limb anatomy was also studied for correlations with stride length in an effort to predict pivot point height in birds from their trackways. Analysis shows a pronounced correlation between a large trochlea arc angle, and a small angle of divarication. Distinct differences in the trochlear arc angle and the angle of divarication could be correlated to such avian morphotypes as shorebirds, waders, ground foragers, and perching birds. No correlations between limb length and stride length could be established, and the equations commonly used for most vertebrate trackways did not hold for birds, most likely due to their unique hindlimb anatomy.
Zusammenfassung
Bisher wurden wenige anatomische Kriterien aufgestellt, um Vogel- von Dinosaurierspuren zu trennen. Das am häufigsten verwendete Kriterium verwendete den Winkel der Divarication zwischen der II. und IV. Zehe, der bei Vögeln in der Regel größer ist als bei Dinosauriern. Der Winkel der Divarikation in Beziehung gesetzt zu einigen Skelettmerkmalen moderner Vögel liefert womöglich zusätzliche Informationen über den Spurenverursacher und seine evolutionäre Stellung. Insgesamt wurden die Tarsometatarsi von 186 Vögeln (11 Ordnungen, 21 Familien, 39 Gattungen, 41 Arten) von 8 Morphotypen—Küstenvögeln, Watvögeln, Ansitzjägern, zygodactylen Vögeln, Greifvögeln, am Boden nach Nahrung suchenden Vögeln, Vögeln mit Schwimmhäuten und syndactylen Vögeln—untersucht, um die Hypothese zu testen, dass die Morphologie des distalen Endes des Tarsometatarsus primär den Winkel der Divarikation der Zehen beeinflusst. Darüber hinaus wurde auch die Lauf-Anatomie auf Korrelationen mit der Schrittlänge untersucht, um die Drehpunkthöhe der Vögel aus ihren Spuren vorherzusagen. Die Analyse erbrachte eine deutliche Korrelation zwischen einem großen Winkel des Trochlearbogens und einem kleinen Winkel der Divarikation. Deutliche Unterschiede im Winkel des Trochlearbogens und dem Winkel der Divarikation konnten mit Vogel-Morphotypen wie Küstenvögeln, Watvögeln, am Boden nach Nahrung suchenden Vögeln und Ansitzjägern in Beziehung gebracht werden. Zwischen Hinterlauf- und Schrittlänge konnten keine Korrelationen festgestellt werden, und die Gleichungen, die für die meisten Vertebratenspuren häufig verwendet werden, waren auf Vögel nicht anwendbar, höchstwahrscheinlich aufgrund ihrer einzigartigen Hinterlauf-Anatomie.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
There has always been some difficulty in distinguishing the tracks of Mesozoic birds from those of small theropod dinosaurs (Lockley et al. 1992). The first tridactyl tracks discovered were given the name Ornithichnites by Hitchcock (1836), as he thought they belonged to giant, extinct birds. Lockley et al. (1992) first established a set of easily definable criteria for distinguishing bird tracks from dinosaur tracks. Although many of the criteria selected were subjective—overall resemblance to modern bird tracks and slender digit and claw impressions—the angle of divarication has proved especially useful. The angle of divarication is the angle between toes II and IV as seen in a track (Fig. 1). Lockley et al. (1992) stated that the divarication angle of birds will, in general, be 110–120°, whereas the angle of divarication in theropod dinosaurs will always be <100°.

Measuring angle of divarication. a Anisodactyl bird foot. b Zygodactyl bird foot. c Palmate bird foot. Angle of divarication (x) between II and III, (y) between III and IV, and (z) between toes II and IV
The purpose of this paper is to determine if tarsometatarsal morphology influences the angle of divarication and how this might be used to infer foot structure from bird tracks. Tarsometatarsi of eight different avian morphotypes were examined: shorebirds, wading birds, perching birds, zygodactyl birds, birds of prey, ground foragers, webbed-footed birds (palmate and totipalmate birds), and syndactyl birds (partly fused toes). We also examined leg morphology and locomotor patterns in extant birds seeking criteria that might retrodict bird anatomy and lifestyle from Mesozoic and Cenozoic tracks and trackways.
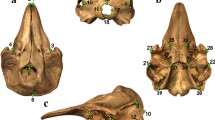
The tarsometatarsus in ornithurine birds results from a fusion of distal tarsal III of the ankle and metatarsals II–IV of the foot. In enantiornithine (e.g., Iberomesornis) and other Sauriurine (e.g., Archaeopteryx) birds, this structure fuses from proximal to distal (i.e., ankle to toes). In modern birds (Ornithurae), those bones fuse from distal to proximal (Martin 1983). The distal articular surface of the tarsometatarsus is formed by three trochlea, where toes II, III, and IV articulate (Fig. 2). Toe I, the hallux, is articulated to the tarsometatarsus by a splint-like metatarsal I further proximal on the bone. The extensor digitorum longus—the muscle that extends the toes—is the main muscle in this region of the tarsometatarsus, extending from the tarsometatarsus onto the digits (Hudson 1937, 1964; Fisher 1946; George and Berger 1966; Cracraft 1971; Verstappen et al. 1998).

Avian tarsometarsus. a The stylized tarsometatarsus of a bird, modeled after a Herring Gull (Larus argentatus). b The distal end of the tarsometatarsus, looking down the long axis of the bone. Tangent lines indicate how to measure the trochlear arc of the tarsometatarsus
There are few studies relating to the functional morphology of the avian tarsometatarsus (Ostrom 1979; Zhang 2004; Zhang and Tian 2006). Studies of the hindlimb musculature of some avian taxa have examined the movement of toes and the general motion of the ankle joint (Cracraft 1971; Berman and Raikow 1982; Verstappen et al. 1998). Ostrom (1979) hypothesized that the tarsometatarsus fused to compliment the complicated system of muscles used to extend and retract the toes. Zhang (2004), and Zhang and Tian (2006) studied the tarsometatarsus of modern raptors and Mesozoic birds, determining function (Zhang 2004) and running statistical analyses to distinguish arboreal from terrestrial birds (Zhang and Tian 2006). No study, however, has correlated the arc of the distal articular surfaces of the tarsometatarsus with the angle of divarication of the toes. This angle of divarication is what translates itself into the tracks and trackways produced by birds.
The three trochlea that comprise the distal end of the tarsometatarsus vary in morphology and arrangement at the species level. Some tarsometatarsi have trochlea in a straight line, whereas others form an acute to an obtuse angle. There are several different foot structures in birds (Bock and Miller 1959). The most common arrangement of toes is called anisodactyl, where toes II, III, and IV face forward, and toe I (the hallux) is reflexed (i.e., posterior projecting). The next most common type is zygodactyl, with two toes aligned forward and two toes aligned backwards. Among anisodactyl birds, there are two webbed-foot types, the most common webbed type is palmate, where toes II, III, and IV are bound by webbing, followed by totipalmate, where all four toes are bound together by webbing. Some birds are semipalmate, usually with webbing more developed between digits III and IV than between digits II and III. Syndactyl arrangement is found in only a few families and is represented by the fusion or partial fusion of two or more toes.
Hind limb anatomy and methods of locomotion in birds
The acetabular (hip socket) height can be calculated for the majority of tetrapods from the stride length of trackways (Leonardi 1987; Hasiotis et al. 2007). Measuring the femur, tibia, and metatarsal height can also be used to calculate stride length. The acetabular height for ornithurine (modern) birds based on stride length may not be possible to measure because modern bird legs and their function are fundamentally different than other bipeds.
The femur of a bird is held nearly parallel to the body (Fig. 3a), rather than more nearly vertical as in other bipeds, and does not significantly contribute to repositioning the hind limb during cursorial movement (Rubenson et al. 2007). The functional leg is, therefore, composed of only two bones, the tibiotarsus and tarsometatarsus (Farlow et al. 2000). Rubenson et al. (2007) showed that the femur in ostriches, the most cursorial-adapted birds, moves in a restricted plane, abducting and adducting in a motion of ~9.5°. In theropod dinosaurs (Fig. 3b), the functional leg consists of all three limb elements, and the femur is oriented nearly vertical with respect to the body (Farlow et al. 2000). In theropods and saurischians, the proximal limb elements (femora) are typically larger and more flexible than the distal elements (tibia-fibula and metatarsals) due to inherent growth dynamics or heterochrony, which in turn affect erectness, gait, and locomotion (Lockley 2007, 2008). Birds have a relatively shorter stride than dinosaurs, based on studies of trackways (Farlow et al. 2000). In birds, the proximal limb elements are relatively short and broad compared to the distal elements (tibiotarsus and tarsometatarsus), which affect gait and locomotion. Modern birds also have an antitrochanter on the pelvis that aids in restricting the motion of the femur (Hertel and Campbell 2007).

a A skeletal reconstruction of a bird leg based on a Turkey Vulture (Cathartes aura). b Skeletal reconstruction of a ornithomimid dinosaur hindlimb
The method of walking used by birds results in different trackways. Wading birds have very precise steps that often result in well-defined trackways with a narrow pace width and long stride length. Many webbed-footed birds waddle and produce trackways with a wide pace width, short stride length, and inward directed footprints. Perching birds and woodpeckers jump when on the ground; some perching birds (e.g., thrushes, blackbirds, some sparrows) alternate between walking and jumping (Elbroch and Marks 2001). Trunk-climbing birds also use jumping as they move up and down tree trunks (Norberg 1981).
Fossil bird tracks are known from the Early Cretaceous worldwide (Lockley et al. 1992, 2001; Lockley and Matsukawa 1998; Azuma et al. 2002; Anfinson 2004; Lockley and Harris 2010). These tracks and trackways are usually interpreted to be shorebird tracks based on their overall similarity to tracks of extant shorebirds (Charadriiformes) and their overall occurrence in deposits interpreted as forming in such water-margin environments as lakeshores, delta plains, and tidal flats (Lim et al. 2002). Since shorebirds are the usual inhabitants of these environments today, shorebird-like birds likely inhabited similar environments 120 million years ago (e.g., Lockley and Harris 2010). This assumption is based on the relationship between Early Cretaceous tracks similar to extant shorebirds and the sedimentary facies in which they occur that indicate a water-margin environment (e.g., Currie 1981; Lockley et al. 2001; Lim et al. 2002). Morphometric criteria for distinguishing trackways of shorebirds from other birds, however, have generally not been provided. Most bird track field guides, however, reveal that digit divarication is important for differentiation of shorebirds from other groups. Also, Lockley (2009) has drawn attention to distinctive polarities in divarication patterns among major clades of birds and bipedal dinosaurs.
Methods
Several species of birds from each morphotype were selected from those documented in Elbroch and Marks (2001). Birds were grouped based on habitat (wading, shorebird, bird of prey, perching, ground forager) or anatomy (web-footed, zygodactyl, syndactyl), and, therefore, independent of taxonomic classification. Shorebird does not necessarily mean the order Charadriiformes in some cases. Birds were divided into these categories in order to sample a wide variety of foot morphology, behaviors, and environments in which they occupy. Forty-one species were selected that had the most numerous examples of tracks and trackways to sample, with the number of examples of tracks measured for each varying from two to eight. Skeletons of the species used in this study are from the University of Kansas Ornithology collections. Four to six individuals of each species were selected, except in cases where there were fewer than four skeletons in the collections (Table 1).
A total of 186 tarsometatarsi were measured (Table 1). The distal ends of the tarsometatarsus from all morphotypes were impressed into thin slabs of clay to obtain a measurable image of the trochlea. The impression was made with the tarsometatarsus oriented vertically. These clay slabs were then laid on sheets of clear plastic and photocopied. The arc angle of the trochlea was measured on the photocopies by drawing tangent lines to the tops of the trochlear condyles II and IV (Fig. 2b). The angle formed where the lines intersect is termed the trochlear arc angle. In the case of the Northern Flicker (Colaptes auratus) and the Pileated Woodpecker (Dryocopus pileatus), trochlea IV (Fig. 4) is composed of two separate trochlea (i.e., trochlea IV and trochlea accesoria). These were labeled i and ii, and measured individually (Fig. 5). In some species, the articular surface for digits II or IV was hard to distinguish, such as in the Great Horned Owl (Fig. 5a); therefore, the lines tangent to these condyles were approximated. Many species, especially birds of prey and zygodactyl birds, had a process extending from trochleas II or IV (Fig. 5a, g). This was not measured to determine the trochlea arc angle, as it is only a process of the external condyle of these trochlea.

Distal end of a Pileated Woodpecker (Dryocopus pileatus) tarsometatarsus. Arrow points to the trochlea accessoria

Distal ends of tarsometatarsi from each morphotype, including both types of zygodactyl tracks
The angles of divarication of the toes were measured from illustrations in Elbroch and Marks (2001) and from plaster casts of modern tracks that were observed as they were produced on the shoreline of Lake Erie at Lake Erie Metropark in Brownstown, Michigan, and the shoreline near the dam on Clinton Lake in Lawrence, Kansas. Divarication angles were measured between toes II and III, III and IV, and II and IV (Fig. 1). The hallux was not measured. Angle of divarication is calculated from lines drawn through the midline of each toe to where the toe meets the metatarsal pad and follows the midline of the toe up to the first joint where it may diverge from the toe if necessary (Fig. 1e, f). Drawing the line in this manner prevents distal toe rotation from factoring into the angle of divarication and prevents the webbing in web-footed birds from having a pronounced effect on the angle of divarication, due to the way the toes curl inward (Fig. 1e, f). Sediment texture and moisture content have been shown to also impact the angle of divarication (Currie 1981).
The arc angle of the trochlea for each species was averaged with no distinction made between left and right tarsometatarsi. The same was done for the angle of divarication of the toes. These measurements were imported into an Excel spreadsheet and graphed to determine any correlation between angle of divarication and trochlea arc. Standard deviation for both arc angle and angle of divarication were calculated using the standard deviation function in Excel.
The relationship between the trochlear arc angle and the angle of divarication of the toes was applied to two tracksites from the Early Cretaceous in order to retrodict the arc angle of the trochlea from the angle of divarication of the toes. Tracks from the Lower Cretaceous Lakota Formation from South Dakota, USA, and tracks from the Lower Cretaceous Haman Formation of South Korea were used for this part of the study.
Limb bones—the femur, tibiotarsus, and tarsometatarsus—from one species of each morphotype were measured in order to examine avian skeletal hindlimb anatomy and test for correlations with stride length. These measurements were taken in order to test the hypothesis that hind-limb anatomy can be retrodicted by stride length or other trackway measurements. The limb bone data were placed into an Excel spreadsheet and correlations between stride length and limb bone ratios were determined. The formulas used were:
These formulae provide insight into the correlations between limb element length and stride length, as well as any potential to calculate the acetabular height for each species in the study. Equation 1 is referred to as the avian functional leg length correlation, as it compares total leg length by functional leg length values. Equation 2 is a simple ratio that compares the tibiotarsus length to the tarsometatarsus length. Equation 3 is from Farlow et al. (2000) that correlates functional leg length to the length of digit III. Lockley (2009) suggests that as leg length increases, foot length decreases; therefore an inverse relationship between these two measurements is expected. All measurements are in millimeters, and the results for Eqs. 1 and 3 are in millimeters, whereas Eq. 2 results in a dimensionless number. Digit III was used originally in Eq. 3 as a proxy for body size; however, this is a poor indicator (Farlow et al. 2000). Median stride lengths for the species used were taken from Elbroch and Marks (2001).
Results
Trochlear arc varied from an average of 58° for the Willet (Tringa semipalmatus; n = 3) to 175° for the Evening Grosbeak (Coccothraustes yespertinus; n = 6) (Table 1). Standard deviation varied from 30.0 for the Northern Flicker (Colaptes auratus) to 2.6 for the Long-billed Curlew (Numenius americanus).
There is a strong correlation (r 2 = 0.60) between trochlear arc angle and the angle of divarication, if the tracks of zygodactyl birds are removed (Fig. 6). With the zygodactyl tracks present, r 2 = 0.1882. The typical anisodactyl track has a highest average angle of divarication of 119° (Calidris minutilla; n = 6) and an overall average of 82.3° (n = 159). Zygodactyl tracks, however, can have an angle of divarication as high as 213° (n = 26) (Table 1). Divarication angle is the factor that skews the graph with respect to the zygodactyl tracks, as the arc angle measurements for these tracks are not that unusual.

Correlation between trochlea arc and angle of divarication, with the zygodactyl tracks removed
Graphic representation of the measurement of angle of divarication versus trochlear arc angle exhibits a variety of patterns. Perching birds and shorebirds form tight clusters (Fig. 6). Ground foragers are much more spread out along the trend line, as are wading birds. Shorebirds, however, form a tighter cluster more similar to the perching birds. One ground bird plots in the center of the perching bird cluster, the Sandhill Crane (Grus canadensis).
Angle of divarication in perching birds varies from 17.75° in the Blue Jay (n = 4) (Cyanocitta cristata) to 56.8° (n = 2) in the Spotted Towhee (Pipilo maculatus). Perching birds, including C. cristata, also have very high angles of trochlear arc, with the morphotype average of 163.5° (n = 35) (Table 1).
Shorebirds have an average angle of divarication 106.5° (n = 23) and wading birds have an average angle of divarication of 94° (n = 24). The trochlear arc angle for shorebirds and wading birds is 75.83° and 118°, respectively (Table 1). Only one individual of webbed-footed birds, the American Avocet (Recurvirostra americana), overlapped with the shorebird cluster. Totipalmate birds fall within the cluster of web-footed birds in terms of arc angle and angle of divarication (Fig. 6). These birds have similar swimming behaviors relative to the different genera of ducks and geese.
Zygodactyl birds generally lie outside the trend, except for the Great Horned Owl (Bubo virginianus), which lies in the middle of the webbed-footed bird cluster with an average angle of divarication of 90.6° (n = 4) and an average trochlear arch angle of 95.6°. The zygodactyl birds that had a split trochlea IV plotted well outside of the normal range (Fig. 7). In terms of trochlea IV, the first condylar region (i) had a smaller angle of arc than the second condylar region (ii). This difference between i and ii is more pronounced in Colaptes auratus than Dryocopus pileatus, with a difference of over 40°.

Correlation between trochlea arc and angle of divarication with the zygodactyl tracks present
Limb length equations
The zygodactyl birds had an avian functional leg length value of 1.45 mm, indicating that they had similar leg proportions (Table 2). Bubo virginianus and the Red-tailed hawk (Buteo jamaicensis) also had similar values of 1.45 and 1.44 mm, respectively. The shorebird morphotype proxy, Charadrius voiciferus, had the smallest value, at 1.31 mm.
Buteo jamaicensis had the smallest tibiotarsus:tarsometarsus ratio, at 1.32. The highest was Bubo virginianus, at 1.94. Each morphotype showed varying values between these numbers, with no two morphotypes giving identical results (Table 2). Wading birds have a much smaller tibiotarsus:tarsometatarsus ratio than the short-legged, webbed-footed birds (1.46–1.81, respectively; see Table 2), indicating a longer tarsometatarsus relative to the tibiotarsus.
For Eq. 3, the perching bird proxy, Cyanocitta christata, had the largest value for functional leg length divided by digit III (3.275). The totipalmate bird proxy, Phalacrocorax auritus, had the lowest value of 1.549. Bubo virginianus and Buteo jamaicensis, the zygodactyl and anisodactyl birds of prey, had values of 2.297 and 1.637, respectively.
Practical application to Early Cretaceous bird tracks
Given the strong correlation between trochlear arc angle and digit divarication, the method proposed here has significant potential for predicting trochlear arc angles in extinct trackmakers. Distinct varieties of bird tracks (i.e., ichnotaxa) are becoming comparatively well known in Cretaceous and Cenozoic deposits (e.g., de Valais and Melchor 2008; Lockley and Harris 2010) and, therefore, provide a useful database. We selected two specific track assemblages from which we estimated trochlear arc angles.
The Early Cretaceous Lakota Formation tracks (Falk 2009) have an average angle of divarication of 107°. Their trochlear arc angle is estimated to be ~95°. The average trochlear arc angle for the extant shorebirds measured in this study is ~75°. The Lakota Formation tracks’ estimated trochlear arc angle is smaller than most wading birds (~118°) with the exception of the White Ibis (Eudocimus albus, n = 5; 87°). The average angle of divarication for the extant wading birds used in this study is 94°.
The bird tracks from the Haman Formation had an average angle of divarication of 113°. Their trochlear arc angle is estimated to be ~85°. The average trochlear arc angle for the extant shorebirds used in this study is ~75°; however, the average trochlear arc angle measurements by species has a range of 58°–88° (Table 1).
Discussion
The arc angle of the trochlea of the tarsometatarsus and the angle of divarication in birds has a strong correlation based on the high r 2 value (excluding zygodactyl tracks). The trochlear arc angle has a significant effect on the angle of divarication in anisodactyl birds. In anisodactyl birds, as trochlear arc angle decreases, the angle of divarication increases. Perching birds have the smallest angle of divarication, whereas shorebirds and waders have the largest angles of divarication. Perching birds have reduced the angle of divarication in order to cleanly and tightly grasp branches, which allows the toes to be brought close together at all times (Fig. 8). Palmate birds were clustered away from the shorebirds and waders with a single exception, Recurvirostra americana, and this is likely because their limb proportions and behaviors are more like waders than other such webbed-footed birds as ducks and geese. R. americana was placed in the webbed-footed bird morphotype based on its classification in Elbroch and Marks (2001), and not its behavior. The variations among tridactyl dinosaur and anisodactyl bird tracks were noted by Lockley (2009), and appear to be nonrandom: i.e., repeated in various clades due to intrinsic growth dynamics. The wide range of angles of divarication in bird tracks reported here suggests that the angle of divarication criteria (110°–120°) proposed by Lockley et al. (1992) needs to be amended.

Comparison between a wading bird, the Black-crowned Night Heron (Nycticorax nycticorax) (left), and a perching bird, the Pine Siskin (Carduelis pinus) (right)
The separate cluster of zygodactyl tracks indicates their unusually high angle of divarication. The exception to this rule, Great Horned Owl (Bubo virginianus), did not have a very high angle of divarication (90.6°). Other zygodactyl birds, including the Snowy Owl (Bubo scandiacus), however, have a much higher average angle of divarication, as high as 198° in Colaptes auratus. The reason for the difference between B. scandiacus and B. virginianus is difficult to explain, as both are owls with similar foot structure. In owls, the straight edge of the K shape of the zygodactyl foot is formed by toes I and II, whereas in such zygodactyl cuckoos as the Greater Roadrunner (Geococcyx californianus), the straight edge is formed by III and IV (Elbroch and Marks 2001). In woodpeckers, the formation of the K shape varies; for example, Colaptes auratus has a straight edge composed of III and IV, whereas I and II compose the straight edge in Dryocopus pileatus. There is no correlation between trochlear arc angle and angle of divarication in zygodactyl birds.
Two perching birds were originally classified as ground birds; these were the American Crow (Corvus brachyrhyncos) and the Black-billed Magpie (Pica pica). These are birds that—based on behavior—could be considered either perching or ground birds, as they spend ~50% of the time perching in trees and other high objects and ~50% of their time foraging on the ground. These birds, however, must be considered perching birds rather than ground-foraging birds based on phylogenetics, as they belong in the Passeriformes and have inherited the specialized hindlimb musculature that is typical of this order (Raikow 1982).
Correlating foot and limb anatomy to stride length and acetabular height in birds is problematic. Birds shifting between walking and running is difficult to determine from tracks (Verstappen et al. 1998; Farlow et al. 2000). Generally, footprints of a running bird may have a smaller angle of divarication between the toes (e.g., Elbroch and Marks 2001; Genise et al. 2009). Birds have knee-driven locomotion, where forward movement during cursorial locomotion is produced at the knee, rather than at the hip joint (Hutchinson and Allen 2009). This is the opposite of many modern tetrapods and bipeds, in which the femur is vertical or nearly vertical and is responsible for much of the forward movement.
The majority of birds, including the Passeriformes and many of the Piciformes, such as woodpeckers, do not walk; instead, they use two different methods of hopping—symmetrical hopping, in which the feet are held parallel, and asymmetrical hopping (also called skipping in Elbroch and Marks 2001) in which one foot is held forwards relative to the other foot. Elbroch and Marks (2001) refer to the distance between pairs of hopping traces as strides. Using the term strides, however, can be misleading since according to other authors (e.g., Leonardi 1987; Lockley 2001; Hasiotis et al. 2007) stride refers to the measurement of a walking trace consisting of two steps (Fig. 9). We recommend that the term jump distance be used to refer to pairs of tracks produced by hopping and that a variety of measurements be taken between the tracks to understand the motion produced by the trackmaker (Fig. 9b, c). We suggest using this term rather than hopping because the term jump implies both feet are on the ground; several types of birds (shorebirds, gulls, etc.) may hop on one leg from time to time (Hasiotis and Falk, personal observations, 2009). Measurements taken would be similar to those outlined in Leonardi (1987) and Hasiotis et al. (2007). Hopping locomotion may be dependent on the size of the bird; however, this is a process that must be quantitatively defined before any further statements can be made.

Measuring stride length and jump distance of bird trackways. a Stride length in a walking bird. b Jump distance in a symmetrically hopping bird. c Jump distance in an asymmetrically hopping bird. Methods from Hasiotis et al. (2007)
There are many possible evolutionary implications for the increase or decrease in trochlear arc angles in ornithurine birds. Birds that walk across soft media (= sediment) require more surface for support to prevent their feet from sinking into it. Recurvirostra americana and the flamingos have overcome this problem by evolving webbing between their short toes (Storer 1971). Herons and other wading birds, however, evolved a different solution to walking across soft media with elongated toes coupled with a wide angle of divarication that create greater surface area (Storer 1971). The combination of wide angle of divarication and toe length has evolved to an extreme in the Jacanidae in the order Charadriiformes, which have exceptionally long toes and a wide angle of divarication; this allows them to walk across marshy ground and floating vegetation without sinking (Beletsky 2006). The combination of exceptionally long toes and wide angle of divarication can be referred to as the snowshoe effect. This snowshoe effect, creating wider spaced toes, is a possible reason for the evolution of wider angles of divarication compared to other morphotypes of ornithurine birds. Early Cretaceous ornithurine birds lived in water-margin environments where the sediment was saturated. Spreading out the toes while walking across saturated mud would allow a bird to walk, run, or take off without having to pull its feet out of several centimeters of soft media. This type of foot morphology, however, would not be useful for a perching bird as a wide angle of divarication would be a problem when grasping branches. Lockley (2009), however, argues that high and low divarication patterns repeat convergently in bird, theropod, and ornithopod clades, due to convergence in growth dynamics.
Equation results
Correlations between avian morphotype limb bone elements are difficult to determine from the equations used for other vertebrate trackways. The three equations used do not show any easily identifiable correlations with stride length (Fig. 10a–c). Median stride length was also plotted against complete and functional leg length to check for any correlations (Fig. 10d, e). All r 2 values were <0.20 and, therefore, poorly correlated. This indicates that the equations commonly used to relate leg length to stride length do not work for birds and, in order to predict stride length from limb length, other methods must be developed. This may explain, in part, the counterintuitive observation that step and stride length is often shorter in longer legged bipeds (Lockley 2001).

Correlations between the three equations used, leg length and stride length. a Plotting Eq. 1 against median stride length. b Plotting Eq. 2 against median stride length. c Plotting Eq. 3 with digit III as the divisor against median stride length. d Total leg length plotted against median stride length. e Functional leg length plotted against median stride length
Storer (1971) stated that the tarsometatarsi and tibiotarsi must be nearly equal in length, or else the center of gravity will shift and make squatting to roost or brood impossible. This is the case only in cursorial birds with short toes and long legs, although Lockley (2009) suggests that differences are due to a compensation between leg length and foot length. Birds that do not rely on running as their primary means of ground locomotion may have a higher difference between the bone lengths. Buteo jamaicensis and the Mallard, Anas platyrhynchos, are two examples from this study with the greatest difference between their tibiotarsal and tarsometatarsal length. These are birds that do not run often or well, if at all.
Our results indicate that the three equations used are not sufficient to understand how to predict acetabular height in birds from limb bones and trackways. Pivot height cannot be easily determined for birds for multiple reasons. The hind leg of a bird is, effectively, never straightened due to the fact that the tibial condyles are directed anteriorly near the distal end of the bone, not at the base of the distal end as with other bipeds, including theropod dinosaurs (see Fig. 3). The femur contributes very little to the motion of the leg, but it does contribute some motion (Rubenson et al. 2007), which will potentially affect the measurement for pivot point height. Simple skeletal measurements are inadequate to determine actual functional leg length during the stride. The best way to interpret pivot height in birds is to observe and measure height, angulation of joints in motion and stride length, and to determine any correlations or discriminant functions that may assist in predicting pivot point height from trackways.
Fossil tracks and the trochlear arc angle
The Lakota Formation tracks had a retrodicted trochlear arc angle of ~95°, intermediate between shorebirds (~75°) and wading birds (~118°). This result implies that birds that produced the Lakota Formation tracks had a foot morphology intermediate to the wading bird and shorebird morphotypes, and engaged in some combination of both shorebird and wading bird behaviors.
The trochlear arc angle of the Haman Formation trackways was estimated to be ~85°, which is above average for the extant shorebirds used in this study but is still within the range of shorebird tarsometatarsi measured (Table 1). This indicates that shorebird-like ornithurine birds produced the Haman Formation trackways and is consistent with the behaviors interpreted from the tracks and trackways.
Conclusions
Our study shows a strong correlation between the angle of divarication and the trochlear arc angle with a smaller angle of trochlear arc resulting in a wider angle of divarication in the toes. A wider angle of divarication may help to disperse the weight of the bird and increase the stability of the feet of wading and shorebirds. There is also good evidence that wide divarication is an inherent feature of growth in the shorebird foot (Lockley 2009), and this may be a reflection of environmental selection pressures. On the other hand, perching birds bring the anterior toes nearly parallel to each other to facilitate the grasping of limbs (Bock and Miller 1959). Further studies could be applied to test the hypothesis that wide angles of divarication may have evolved so that birds were able to walk across saturated sediment without sinking. The equations normally used to calculate leg length, pivot point height, and speed of locomotion do not seem to apply to birds because the functional pivot point for stride length in ornithurine birds is at the knee rather than at the acetabulum. We were unable to find any correlation between the length of the avian limb and relative stride length.
In many birds, the relationship of the pelvic musculature to the femur and tibiotarsus may be extensive and complicated, as the muscle of the legs bind not only the femur but also the tibiotarsus to the body (Heilmann 1927; Gill 2006). Even in forms with long tibiotarsi (e.g., loons), the stride length may be short with the tarsometatarsus contributing most of the walking motion. Considering this caveats, any attempt to extend comparisons of behavioral and track studies on modern birds to very different limb morphologies (e.g., dinosaur limbs and locomotion) should be met with a certain degree of skepticism.
The wide angle of divarication in birds is likely to be an adaptation for terrestrial locomotion and is derived rather than primitive; the reduction of the angle of divarication in modern perching birds is likely a reversal from the small angle of trochlear arc back to a wide angle of trochlear arc. Bird tracks from the Mesozoic have almost universally been associated with ornithurine birds. The different methods of the fusion of the tarsometatarsus in enantiornithines and other Sauriurine birds may produce a different correlation between the distal end of the tarsometatarsus and the tracks and trackways produced. It is important to remember that the study presented here applies only to ornithurine birds with an antitrochanter on the acetabulum. The tracks and trackways of primitive secondarily flightless dromaeosaurids and oviraptorsaurids, however, may have low angles of divarication despite having a cursorial lifestyle.
References
Azuma Y, Arakawa Y, Todima Y, Currie PJ et al (2002) Early Cretaceous bird tracks from the Tetori Group, Fukui Prefecture, Japan. Mem Fukui Prefectural Dinosaur Mus 1:1–6
Beletsky L (2006) Birds of the world. Johns Hopkins University Press, Baltimore
Berman SL, Raikow RJ (1982) The hindlimb musculature of mousebirds. Auk 99:41–57
Bock WJ, Miller WD (1959) The scansorial foot of the woodpeckers with comments on the evolution of perching and climbing feet in birds. Am Mus Novit 1931:1–46
Cracraft J (1971) The functional morphology of the hind limb of the domestic Pigeon (Columbia livia). Bull Am Mus Nat Hist 144:171–286
Currie PJ (1981) Bird footprints from the Gething Formation (Aptian, Lower Cretaceous) of northeastern British Columbia, Canada. J Vertebr Paleontol 1(3–4):257–264
de Valais S, Melchor RN (2008) Ichnotaxonomy of bird-like footprints: an example from the Late Triassic-Early Jurassic of Northwest Argentina. J Vertebr Paleontol 28(1):145–159
Elbroch M, Marks E (2001) Bird tracks and sign: a guide to North American species. Stackpole, Mechanicsburg
Falk AR (2009) Interpreting behavior from Early Cretaceous bird tracks and the morphology of bird feet and trackways. Master’s thesis, University of Kansas
Farlow JO, Gatsey SM, Holtz TR Jr, Hutchinson JR, Robinson JM et al (2000) Theropod locomotion. Am Zool 40:640–663
Fisher HI (1946) Adaptations and comparative anatomy of the locomotor apparatus of new world Vultures. Am Mid Nat 35:545–727
Genise JF, Melchor RN, Archangelsky M, Bala LO, Straneck R, de Valais S (2009) Application of neoichnological studies to behavioural and taphonomic interpretation of fossil bird-like tracks from lacustrine settings: the Late Triassic-Early Jurassic? Santo Domingo Formation, Argentina. Palaeogeogr Palaeoclimatol Palaeoecol 272:143–161
George JC, Berger AJ (1966) Avian myology. Academic, New York
Gill FB (2006) Ornithology, vol 3. Freeman, New York
Hasiotis ST, Platt BF, Hembree DI, Everhart M (2007) The trace-fossil record of vertebrates. In: Miller W III (ed) Trace fossils: concepts, problems, prospects. Elsevier, Amsterdam, pp 196–218
Heilmann G (1927) The origin of birds. Appleton, New York
Hertel F, Campbell KE (2007) The Antitrochanter of birds: form and function in balance. Auk 124:789–805
Hitchcock E (1836) Ornithichnology: description of the foot marks of birds (Ornithichnities) on New Red Sandstone in Massachusetts. Am J Sci (1880) 29:307–340
Hudson GF (1937) Studies on the muscles of the pelvic appendage in birds. Am Mid Nat 18:1–108
Hudson GF (1964) Muscles of the pectoral limb in galliform birds. Am Mid Nat 71:1–113
Hutchinson JR, Allen V (2009) The evolutionary continuum of limb function from early theropods to birds. Naturwissenschaften 96(4):423–448
Leonardi G (1987) Glossary and manual of tetrapod palaeoichnology: Departamento Nacional da Produc¸a˜o Mineral, Brasil
Lim J-D, Martin LD, Zhou Z, Baek K-S, Yang S-Y et al (2002) The significance of Early Cretaceous bird tracks. In: Zhou Z, Zhang F (eds) Proceedings of the 5th symposium of the society of avian paleontology and evolution. Science Press, Beijing, pp 157–163
Lockley MG (2001) Trackways-dinosaur locomotion In: Briggs DEG, Crowther P (eds) Paleobiology: a synthesis. Blackwell, Oxford, pp 412–416
Lockley MG (2007) The morphodynamics of dinosaurs, other archosaurs and their trackways: holistic insights into relationships between feet, limbs and the whole body. In: Bromley R, Melchor R (eds) Ichnology at the crossroads: a multidimensional approach to the science of organism–substrate interactions. Society of Economic Paleontologists and Mineralogists Special Publication, vol 88, pp 27–51
Lockley MG (2009) New perspectives on morphological variation in tridactyl footprints: clues to widespread convergence in developmental dynamics. Geol Q 53:415–432
Lockley MG, Harris J (2010) On the trail of early birds: a review of the fossil footprint record of avian morphological evolution and behavior. In: Ulrich PK, Willett JH (eds) Trends in ornithological research. Nova, New York, pp 1–63
Lockley M, Matsukawa M (1998) Lower Cretaceous vertebrate tracksites of East Asia, New Mexico. Mus Nat Hist Sci Bull 14:135–142
Lockley MG, Yang SY, Matsukawa M, Fleming F, Lim SK (1992) The track record of Mesozoic birds: evidence and implications. Philos Trans R Soc Lond B 336:113–134
Lockley MG, Janke P, Theisen L (2001) First reports of bird and ornithopod trackways from the Lakota Formation (Lower Cretaceous), Black Hills, South Dakota. In: Tanke DH, Carpenter K (eds) Mesozoic vertebrate life. Indiana University Press, Bloomington, pp 443–452
Lockley MG, Kukihara R, Mitchell M (2008) Why Tyrannosaurus rex had puny arms: an integral morphodynamic solution to a simple puzzle in theropod paleobiology. In: Larson P, Carpenter K (eds) Tyrannosaurus rex, the tyrant king. Indiana University Press, pp 130–164
Martin LD (1983) The origin and early radiation of birds. In: Brush AH, Clark GA Jr (eds) Perspectives in ornithology: essays presented for the Centennial of the American Ornithologists’ Union. Cambridge University Press, Cambridge, pp 291–338
Norberg R (1981) Why foraging birds in trees should hop and climb upwards rather than downwards. Ibis 123:281–288
Ostrom JH (1979) Bird flight: how did it begin? Am Sci 67:46–56
Raikow RJ (1982) Monophyly of the passierformes: test of a phylogenic hypothesis. Auk 99:431–445
Rubenson J, Lloyd DG, Besier TF, Heliams DB, Fournier PA et al (2007) Running in ostriches (Struthio camelus): three-dimensional joint axes alignment and joint kinematics. J Exp Bio 210:2548–2562
Storer RW (1971) Adaptive radiation of birds. In: Farner DS, King JR (eds) Avian biology, vol 1. Academic, New York, pp 149–188
Verstappen M, Aerts P, De Vree F (1998) Functional morphology of the hindlimb musculature of the black-billed magpie, Pica pica (Aves, Corvidae). Zoomorph 118:207–233
Zhang Y-G (2004) Morphological characteristics and function of raptorial tarsometatarsus. Chin J Zoo 39(6):27–32
Zhang Y-G, Tian X-Y (2006) Statistic analysis of the tarsometatarsus morphology of Mesozoic birds from Western Liaoning, China and its implications. Vertebrata PalAsiatica 44:297–306
Acknowledgments
We are grateful to Dr. Mark Robbins of the University of Kansas for access to specimens, Peter Larson and the staff at the Black Hills Institute of Geologic Research, Leon Thiesen and the landowner Dave Geary for access to the South Dakota site and aid in fieldwork, and Jong-Deock Lim for casts of tracks from South Korea. This manuscript is part of a Master’s Thesis conducted by ARF. J. Schmerge, D. Lobue, A. Rosales, and W. Jones of the IchnoBioGeoSciences (IBGS) Research Group, D.A. Burnham, and A. Nabavizadeh contributed meaningful comments and insights that helped improve the manuscript. This investigation was supported by the University of Kansas General Research Fund allocation #2301278, Panorama Small Grants Competition, and the University of Kansas Department of Geology. We also thank two anonymous reviewers, Martin Lockley, and the editor for comments and suggestions that improved the manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by F. Bairlein.
Rights and permissions
About this article
Cite this article
Falk, A.R., Martin, L.D. & Hasiotis, S.T. A morphologic criterion to distinguish bird tracks. J Ornithol 152, 701–716 (2011). https://doi.org/10.1007/s10336-011-0645-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10336-011-0645-x